1 �wՓ1.1�O(sh��)Ӌ(j��)Ŀ����Ƭ�C(j��)�����ԃr(ji��)�ȸߡ����ɶȸߡ��ɿ��Ժá����ɔ_�ԏ�(qi��ng)�����c(di��n)���V���\(y��n)���ڸ��N���܃x���С���������Ҏ(gu��)�t�Ŀɾ��̽�ͨ����ϵ�y(t��ng)�����Ԍ�(sh��)�F(xi��n)��(du��)܇�v�����˵Ŀ��ƣ�ʹ�Ľ�ͨ���ڹ��������ԣ����Æ�Ƭ�C(j��)�Ԅ�(d��ng)���ƽ�ͨ���ЬF(xi��n)��(sh��)�����(hu��)���x��
ͨ�^(gu��)�����O(sh��)Ӌ(j��)��ʹ�W(xu��)�����H��������I(l��ng)��(hu��)��Ӌ(j��)��C(j��)��Ӳ���M�ɵ�ܛ�����̵Ļ���ԭ����֪�R(sh��)�����Ҹ�Ҫ�W(xu��)��(hu��)��(y��ng)�ã���(w��)��������Փ�͌�(sh��)�`��Y(ji��)�ϣ�����Ӳ��������ܛ���O(sh��)Ӌ(j��)�Ļ���˼��ͷ�������߷�����(w��n)�}����Q��(w��n)�}���̌�(sh��)�`��������
1.2�O(sh��)Ӌ(j��)��(n��i)��1���O(sh��)Ӌ(j��)һ��(g��)ʮ��·�ڽ�ͨ�����������Æ�Ƭ�C(j��)����LED��ģ�Mָʾ��ģ�M�|�������ʮ��·�ڽ�ͨ��̖(h��o)������r���ϱ��������ɵ�Ӌ(j��)�r(sh��)�r(sh��)�g��60s���|������θɵ�Ӌ(j��)�r(sh��)�r(sh��)�g��45s��
2���t�G����׃���g�����߶Δ�(sh��)�a�����@ʾÿ�뵹Ӌ(j��)�r(sh��)��
3��Ӌ(j��)�r(sh��)�����5��r(sh��)���ɂ�(g��)������S��ͬ�r(sh��)�W�qֱ��Ӌ(j��)�r(sh��)��0��
2 ϵ�y(t��ng)�O(sh��)Ӌ(j��)����
2.1�O(sh��)Ӌ(j��)˼·ģ�M��ͨ������������ʹ�Æ�Ƭ�C(j��)��(l��i)����һЩLED���͔�(sh��)�a�ܣ�ģ�M�挍(sh��)��ͨ���Ĺ��ܡ���(d��ng)�ϱ����ɵ�ͨ܇�r(sh��)�G���������|���θɵ��ɵ��t��������(d��ng)55sͨ܇�r(sh��)�g�������ɵ��G��Ϩ�磬�S�������S����5s�������ɵ��ГQ���θɵ�ͨ܇���˕r(sh��)���ɵ��S��Ϩ�磬�t���������θɵ��t��Ϩ�磬�G�������θɵ��_(k��i)ʼͨ܇�� 40sͨ܇�r(sh��)�g���θɵ��G��Ϩ�磬�S�������S����5s���ɴθɵ��ГQ�����ɵ�ͨ܇���˕r(sh��)�θɵ��S��Ϩ�磬�t�����������ɵ��t��Ϩ�磬�G��������˲���ѭ�h(hu��n)���t���S���G�����W�������Ô�(sh��)�a�ܵ�Ӌ(j��)��(sh��)�@ʾ�g���ȣ����ڹ���ʮ��·�ڵ�܇�v�����˽�ͨ��
2.2�����O(sh��)Ӌ(j��)����AT89C52��Ƭ�C(j��)��ɽ�ͨ��̖(h��o)�����������O(sh��)Ӌ(j��)��ԓ��ͨ��̖(h��o)����������һ�l���ɵ���һ�l֧�ɵ��R�ϳ�ʮ��·�ڣ���ÿ��(g��)���̎�O(sh��)�üt���G���S��ɫ��̖(h��o)������(sh��)�a���@ʾʣ���r(sh��)�g���t������ֹͨ�У��G�������Sͨ�У��S�����t�o����е�܇�v�Еr(sh��)�gͣ�ڽ��о��⡣�üt���G���S�l(f��)����O������̖(h��o)����8��(g��)��ꎘO��(sh��)�a���@ʾʣ���r(sh��)�g��
����(j��)�O(sh��)Ӌ(j��)���ܼ�Ҫ���҂��ɵ�ϵ�y(t��ng)��ԭ����D��D2-1��ʾ��
�D2-1 ϵ�y(t��ng)ԭ��D(Ҋ(ji��n)51hei����)
3 ϵ�y(t��ng)Ӳ���·�O(sh��)Ӌ(j��)
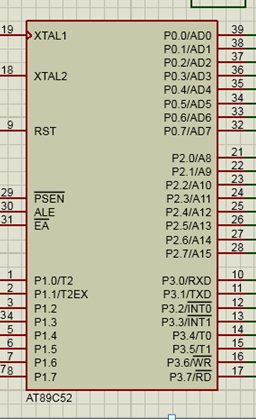
3.1 AT89C52��Ƭ�C(j��)AT89C52��һ��(g��)��늉���������CMOS 8λ��Ƭ�C(j��)��Ƭ��(n��i)��8k bytes�Ŀɷ���(f��)����(xi��)��Flashֻ�x����惦(ch��)����256 bytes���S�C(j��)��ȡ��(sh��)��(j��)�惦(ch��)��(RAM)����������ATMEL��˾�ĸ��ܶȡ�����ʧ�Դ惦(ch��)���g(sh��)���a(ch��n)�����ݘ�(bi��o)��(zh��n)MCS-51ָ��ϵ�y(t��ng)��Ƭ��(n��i)��ͨ��8λ����̎������Flash�惦(ch��)��Ԫ��AT89C52��Ƭ�C(j��)������ИI(y��)�������V���đ�(y��ng)�á�
AT89C52��40��(g��)���_��32��(g��)�ⲿ�p��ݔ��/ݔ��(I/O)�˿ڣ�ͬ�r(sh��)��(n��i)��2��(g��)���Д�ڣ�3��(g��)16λ�ɾ��̶��r(sh��)Ӌ(j��)��(sh��)��,2��(g��)ȫ�p������ͨ�ſڣ�2 ��(g��)�x��(xi��)�ھ���AT89C52�����ճ�Ҏ(gu��)�����M(j��n)�о��̣�Ҳ�����ھ����̡��䌢ͨ�õ�̎������Flash�惦(ch��)���Y(ji��)����һ���e�ǿɷ���(f��)����(xi��)�� Flash�惦(ch��)������Ч�ؽ����_(k��i)�l(f��)�ɱ���
���D3-1��ʾ��
�D3-1 AT89C52��Ƭ�C(j��)
3.1.1�����·�O(sh��)Ӌ(j��)�r(sh��)��·���ڮa(ch��n)��MCS-52��Ƭ�C(j��)�����r(sh��)����횵ĕr(sh��)犿�����̖(h��o)�����(n��i)���·�ڕr(sh��)���̖(h��o)�����£���(y��n)��ذ��r(sh��)���(zh��)��ָ���M(j��n)�й������ڈ�(zh��)��ָ��r(sh��)��CPU����Ҫ������惦(ch��)����ȡ����Ҫ��(zh��)�е�ָ������a��Ȼ���g�a�����ɕr(sh��)���·�a(ch��n)��һϵ�п�����̖(h��o)ȥ���ָ����Ҏ(gu��)��������
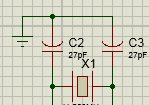
���O(sh��)Ӌ(j��)����12MHz����̓ɂ�(g��)27Pf��Ƭ��ݣ�������(g��u)��һ��(g��)��(w��n)�����Լ���ʎ����ԓ��ݵĴ�СӰ���ʎ���l�ʵĸߵ͡���ʎ���ķ�(w��n)���Ժ�����Ŀ����ԡ����Ƭ�C(j��)�ṩ��(bi��o)��(zh��n)�r(sh��)犡����Ѓɂ�(g��)��Ƭ������{(di��o)���á� ��D3-2��ʾ��
�D3-2 �����·
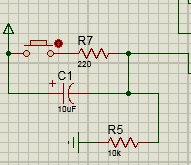
3.1.2��(f��)λ�·�O(sh��)Ӌ(j��)��(f��)λ���_RSTͨ�^(gu��)һ��(g��)˹�����|�l(f��)���c��(f��)λ�·���B��˹�����|�l(f��)���Á�(l��i)����������ÿ��(g��)�C(j��)�����ڵ�S5P2��˹�����|�l(f��)����ݔ���ƽ�ɏ�(f��)λ�·�ɘ�һ�Σ�Ȼ����ܵõ���(n��i)����(f��)λ��������Ҫ����̖(h��o)��
��(f��)λ�·ͨ����������Ԅ�(d��ng)��(f��)λ�Ͱ��o��(f��)λ�ɷN��ʽ��
ԓ�O(sh��)Ӌ(j��)���ü��ֱ�ӏ�(f��)λ����(f��)λ��ݲ���10uF�����10000�W�����˲�g��RES���_����ƽ��ͨ�^(gu��)����·��늣�ʹ늉���u�����㣬�Ķ���(sh��)�F(xi��n)�ˏ�(f��)λ���ܡ�
���B�ӈD���D3-3��ʾ��
�D3-3 ��(f��)�
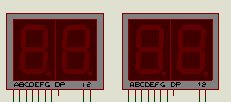
3.2�@ʾ�����·�O(sh��)Ӌ(j��)3.2.1��(sh��)�a���x����̎���õĔ�(sh��)�a�ܕr(sh��)��ꎘO��(sh��)�a�ܣ�G��F��E��D��C��B��A�߂�(g��)�˿���ݔ��˿ڣ���(du��)���λ�M(j��n)���xֵ����λ�t������(f��)λ�t�磬�ôˁ�(l��i)�@ʾ������(y��ng)�Ĕ�(sh��)�֣�1��2�ɶ˿��Á�(l��i)���Ƹ�λ�͵�λ���xͨ�@ʾ��ֻҪ��(du��)�˿���λ��������x��ԓ�˿ڣ�����(du��)����������λ�M(j��n)���xֵ���@ʾ����(sh��)�a�����D3-5��ʾ��
�D3-5 ��(sh��)�a��
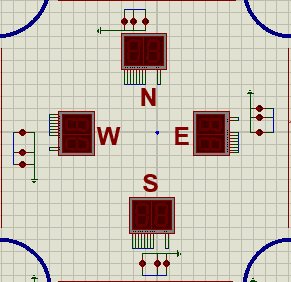
3.2.2ʮ��·�ڽ�ͨ���O(sh��)Ӌ(j��)һ�l���ɵ���һ�l�θɵ��R�ϳ�ʮ��·�ڣ��ϱ������·�����ɵ����|������ɵ���θɵ���ÿ��(g��)·�ڶ�����������(g��)LED���(l��i)�@ʾ���քe�����˼t�S�G���N������(l��i)ģ�M·�ڽ�ͨ����׃�Q��LED��̖(h��o)�����D3-6��ʾ��
�D3-6 LED��̖(h��o)���O(sh��)Ӌ(j��)
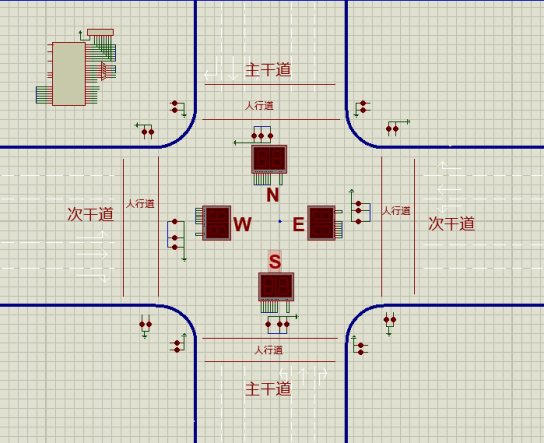
3.3ϵ�y(t��ng)Ӳ�����·�D����(j��)�O(sh��)Ӌ(j��)Ҫ��������·���õ�ϵ�y(t��ng)Ӳ�����·�D��D3-7��ʾ��
�D3-7 ϵ�y(t��ng)Ӳ�����·�D
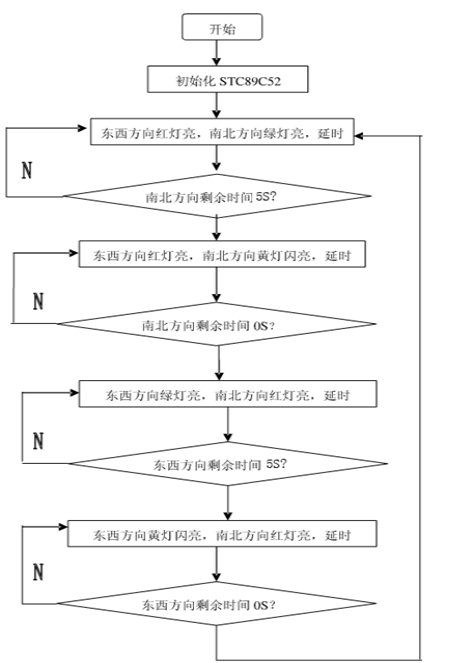
4 ϵ�y(t��ng)ܛ�������O(sh��)Ӌ(j��)4.1�������O(sh��)Ӌ(j��)4.1.1���w���̈D
4.2�����ӳ����O(sh��)Ӌ(j��)4.2.1ѭ�h(hu��n)���̿���˼·






5 �{(di��o)ԇ�c����5.1 Proteusܛ��ϵ�y(t��ng)�������_(k��i)Proteusܛ��������Ӳ��ϵ�y(t��ng)�D3-7��ʾ�Ӿ�,�B���ꮅ��ͨ�^(gu��)keil�Ѿ��õ�c�Z(y��)�Գ����D(zhu��n)�Q��.hex�ļ�������������Ƭ�C(j��)��(n��i)��
�O(sh��)�ú÷��������g����o(w��)�`���{(di��o)ԇ��(zh��)�г��Y(ji��)���@ʾ����Ҫ��
5.2����Y(ji��)������(j��)����Ҫ��քe������N��r�µ�������r�����w���£�
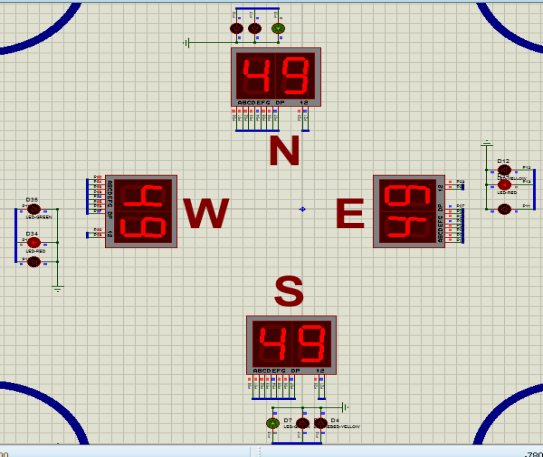
1.���D5-1����D��ʾ���ϱ��������ɵ����G�����|���θɵ��������t����
�D5-1 �ϱ��G���|���t��
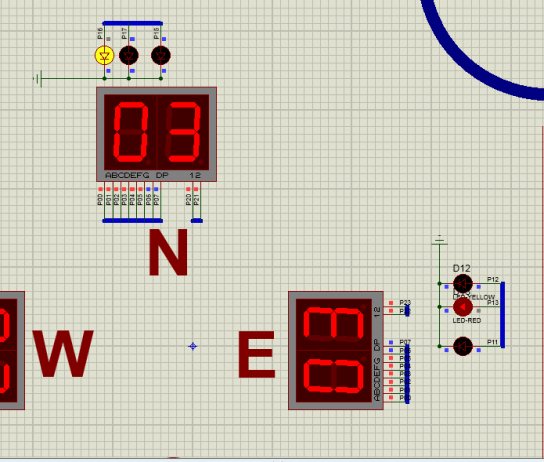
2.���D5-2��ʾ���ϱ�����Ӌ(j��)�r(sh��)5s��׃?y��u)��S�����|����G����
�D5-2�ϱ��S���|���t��
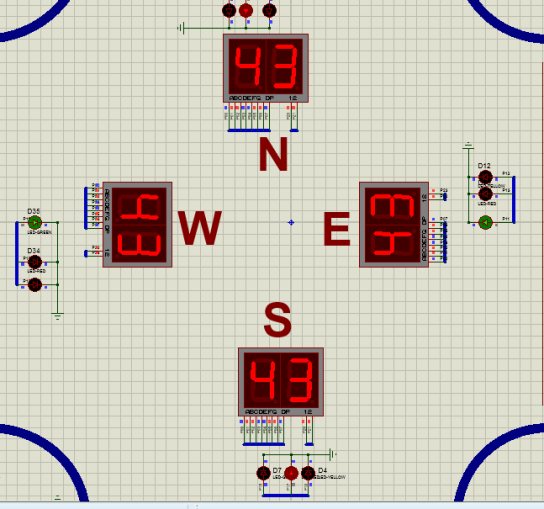
3.���D5-3��ʾ���|������׃?y��u)�G�����ϱ�����׃?y��u)�t����
�D5-3�ϱ��t�����|���G��
4.���D5-4��ʾ���|��������׃?y��u)��S��




 [��(f��)��朽�]
[��(f��)��朽�]

 ����TQQ:125739409;���g(sh��)����QQȺ281945664
����TQQ:125739409;���g(sh��)����QQȺ281945664






 QQ���Ѻ�Ⱥ
QQ���Ѻ�Ⱥ QQ���g
QQ���g �vӍ��
�vӍ�� �vӍ����
�vӍ���� �ղ�
�ղ� ����
���� �
� ��
��

