���چ�Ƭ�C(j��)��܇��ײ��(b��o)��ϵ�y(t��ng)�O(sh��)Ӌ(j��)
�Ͼ���Ϣ���̴�W(xu��)�I���W(xu��)Ժ�� �Ͼ�210044
ժҪ����(du��)����܇��܇��ײ���}������ˌ������y���x�͆�Ƭ�C(j��)�Y(ji��)����һ�w�ķ���,���o����һ�N����AT89C51��Ƭ�C(j��)�ĵ�܇��ײ��(b��o)��ϵ�y(t��ng)���O(sh��)Ӌ(j��),��(du��)ϵ�y(t��ng)�п��Ʋ��֡��l(f��)�䲿�֡����ղ��֡��@ʾ���ֺ͈�(b��o)�����ֳ��F(xi��n)�Ć��}�M(j��n)��̎�������IJ���һ�N�������еĜy��ԭ�������˷�ײ��(b��o)��ϵ�y(t��ng),���w�����˵�܇��ײϵ�y(t��ng)���O(sh��)Ӌ(j��)ԭ����������Ԫ�����O(sh��)Ӌ(j��)��������������˳����y���ԭ������(y��ng)�ã�����B���҇��ڳ����y��İl(f��)չ�F(xi��n)����^߀��һЩ�o������Ĝy���`�߀��������M(j��n)�ĿƌW(xu��)�l(f��)չ���Խ�Q��
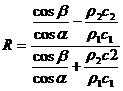
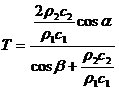
�S�����(hu��)��(j��ng)��(j��)�İl(f��)չ��ͨ�\(y��n)ݔ�I(y��)�w�ٰl(f��)չ����܇�Ĕ�(sh��)���ڴ���������ͨ��D��rҲ��څ��(y��n)�أ�ײ܇�¼��ҌҰl(f��)��������˲��ɱ������������ͽ�(j��ng)��(j��)�pʧ��ᘌ�(du��)�@�N��r���O(sh��)Ӌ(j��)һ�N푑�(y��ng)�죬�ɿ��Ը����^�齛(j��ng)��(j��)��(sh��)�õ���܇��ײ��(b��o)��ϵ�y(t��ng)���ڱ��С������y�෨���Ҋ��һ�N���x�y�������(y��ng)������܇ͣ܇��ǰ�����ҷ�ײ�Ľ����x�͵��٠�r����������܇��܇��ײ��(b��o)��ϵ�y(t��ng)�У���������һ�N���������ͬ�Ӿ�������ݔ?sh��)Ļ����������ԡ������䣬���䣬���棬���䣬ɢ�䡣�����y�༴�������䷴�����ԣ���(d��ng)܇�v���˕r(sh��)���������x���������ó����z�y܇�v���ϵK��λ�ã�������ָʾ�������Q����܇�v���ϵK��ľ��x��λ��֪ͨ�{�?c��)ˆT����ȫ�����á�
1.2 ����(n��i)��F(xi��n)��
��܇��܇��ײ�y����(b��o)�����LJ��Ұ�ȫ���g(sh��)�l(f��)չ���g���c(di��n)�_�l(f��)�Ŀ����(xi��ng)Ŀ֮һ����������܇��܇�y��һ�����ķN��1�������W�⡢2�������W�⡢3�Z�����W�⡢4��܇��Σ�U(xi��n)���x�r(sh��)�l(f��)������(b��o)�ij�����܇��(b��o)���������ںܶ��о������õ��������yُ��ϡ�еČ���Ԫ����ʹ���y���ƏV�������O(sh��)Ӌ(j��)���Ç���(n��i)���a(ch��n)��ͨ��Ԫ�����ɱ��^����������ʹ��������(g��)��܇�^�����Ԅ�(d��ng)�y��܇β������ϵK��ľ��x���ڵ�܇���O���x�r(sh��)��(hu��)�l(f��)�����ٵľ����������{�Tע��x܇�������¹ʵİl(f��)����
��Փ�ĸ����˳����z�y�İl(f��)չ������ԭ�����U���˳�����������ԭ�������c(di��n)�������(du��)�ڈ�(b��o)��ϵ�y(t��ng)��һЩ��Ҫ����(sh��)�M(j��n)����ӑՓ���о����Լ��ڳ����y��ϵ�y(t��ng)���ܵĻ��A(ch��)�ϣ�����ˈ�(b��o)��ϵ�y(t��ng)�Ŀ��w�Y(ji��)��(g��u)�������O(sh��)Ӌ(j��)��ϵ�y(t��ng)�l(f��)�䡢�����·�����м�(x��)��B��ϵ�y(t��ng)���O(sh��)Ӌ(j��)��Ԫ��ԭ���������Ĺ���ԭ����
 ���o���|(zh��)��
���o���|(zh��)��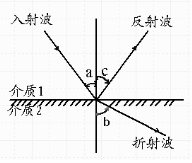


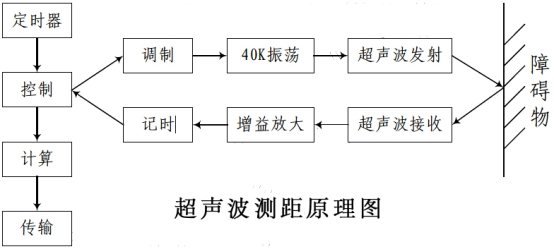
�l(f��)�䲿�ֵ���}�_늉��ܸߣ��������ϵK��ز�����ĉ�늾�Ƭ�a(ch��n)�������l늉����^��ʮ������Ҫ��(du��)�@��С����̖(h��o)�M(j��n)��̎���ͱ�횷Ŵ�һ���ķ��ȡ����ղ��־�������(j��)�Ŵ��·���z���·���T���Єe�·��(g��u)�ɵģ����а����s�������·����K�_(d��)����(du��)�ز��M(j��n)�зŴ�z�y���a(ch��n)��һ��(g��)��Ƭ�C(j��)�܉��R(sh��)�e���Д���̖(h��o)����ز����_(d��)�Ę�(bi��o)־���������ڳ��������������ԣ���ä�^(q��)�Ĵ��ڣ���(du��)�ڻز��Ľ��պ�̎��������ஔ(d��ng)�̶ȵ�Ӱ푡�
3ϵ�y(t��ng)Ӳ���O(sh��)Ӌ(j��)ϵ�y(t��ng)Ӳ��ԭ��D��D3��PCB�p�����D4��
�D3 ϵ�y(t��ng)Ӳ��ԭ��D

�D4 PCB�p���
3.1 ��С��Ƭ�C(j��)ģ�K
������ʹ�õĆ�Ƭ�C(j��)��AT89C51��AT89C51��һ��(g��)��늉���������CMOS8λ��Ƭ�C(j��)��Ƭ��(n��i)��4KB�Ŀɷ���(f��)������Flashֻ�x����惦(ch��)����128B���S�C(j��)��ȡ��(sh��)��(j��)�惦(ch��)����RAM������������ATMEL��˾�ĸ��ܡ�����ʧ�Դ惦(ch��)���g(sh��)�a(ch��n)�������ݘ�(bi��o)��(zh��n)MCS-51ָ��ϵ�y(t��ng)��Ƭ��(n��i)��ͨ��8λ����̎������Flash�惦(ch��)��Ԫ����(n��i)�ù���(qi��ng)�����Ӌ(j��)��C(j��)��AT89C51�ṩ�˸��ԃr(ji��)�ȵĽ�Q������ AT89C51��һ��(g��)���ĸ����܆�Ƭ�C(j��)��40��(g��)���_��32��(g��)�ⲿ�p��ݔ��/ݔ����I/O���˿ڣ�ͬ�r(sh��)��(n��i)��2��(g��)���Д�ڣ�2��(g��)16λ�ɾ��̶��r(sh��)Ӌ(j��)��(sh��)����2��(g��)ȫ�p������ͨ�ſڡ�AT89C51�����ճ�Ҏ(gu��)�����M(j��n)�о��̣�Ҳ�����ھ����̡��䌢ͨ�õ�̎������Flash�惦(ch��)���Y(ji��)����һ���e�Ƿ���(f��)������Flash�惦(ch��)������Ч�ؽ����_�l(f��)�ɱ���
��Ƭ�C(j��)��Сģ�K����������(f��)λ�·�������·��p0�����裬�Դ�ӿ��·�������·������Ƭ�C(j��)�����Ǐ��_�l(f��)���ϟ����M(j��n)�룬�o�����Ӵ����·���ɹ�(ji��)�s�ɱ�����


3.3 ��(b��o)���·�O(sh��)Ӌ(j��)
ϵ�y(t��ng)��(b��o)���·��һ��(g��)���O�ܺ�һ��(g��)���ȽM�ɡ�
�D5 ϵ�y(t��ng)��(b��o)���·
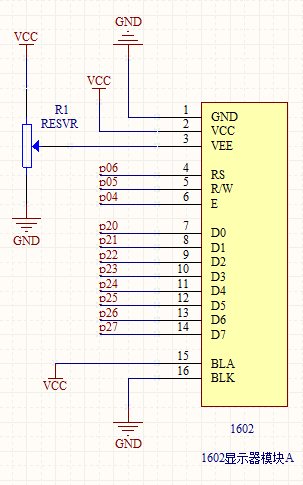
3.4.1 LCD1602��Ҫ���g(sh��)����(sh��)��
�@ʾ����:16��2��(g��)�ַ�
оƬ����늉�:4.5��5.5V
�������:2.0mA(5.0V)
ģ�K��ѹ���늉�:5.0V
�ַ��ߴ�:2.95��4.35(W��H)mm
3.4.2 LCD1602�����_���ܣ�
��1�_��VSS����Դ��
��2�_��VDD��5V���Դ��
��3�_��VL��Һ���@ʾ����(du��)�ȶ��{(di��o)���ˣ������Դ�r(sh��)��(du��)�ȶ��������ӵؕr(sh��)��(du��)�ȶ���ߣ���(du��)�ȶ��^�ߕr(sh��)��(hu��)�a(ch��n)������Ӱ����ʹ�Õr(sh��)����ͨ�^һ��(g��)10K���λ���{(di��o)����(du��)�ȶȡ�
��4�_��RS��Ĵ����x���ƽ�r(sh��)�x��(sh��)��(j��)�Ĵ��������ƽ�r(sh��)�x��ָ��Ĵ�����
��5�_��R/W���x����̖(h��o)�������ƽ�r(sh��)�M(j��n)���x���������ƽ�r(sh��)�M(j��n)�Ќ���������(d��ng)RS��R/W��ͬ����ƽ�r(sh��)���Ԍ���ָ������@ʾ��ַ����(d��ng)RS����ƽR/W����ƽ�r(sh��)�����xæ��̖(h��o)����(d��ng)RS����ƽR/W����ƽ�r(sh��)���Ԍ��딵(sh��)��(j��)��
��6�_��E�˞�ʹ�ܶˣ���(d��ng)E���ɸ��ƽ��׃�ɵ��ƽ�r(sh��)��Һ��ģ�K��(zh��)�����
��7��14�_��D0��D7��8λ�p��(sh��)��(j��)����
��15�_������Դ���O��
��16�_������Դؓ(f��)�O��
4ϵ�y(t��ng)ܛ������
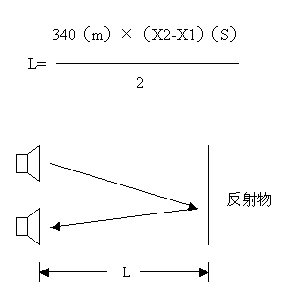
T0���xȡ�����ĕr(sh��)�g�(sh��)��(j��)������������xֱֵ���@ʾݔ������?y��n)�r(sh��)�g��ֵ�c��(sh��)�H�ľ��xֵ֮�g�D(zhu��n)�Q��ʽ��S=0.5*V*T�����У�V�����ڳ����µĂ����ٶȣ�T��l(f��)����̖(h��o)������֮�g��(j��ng)�v�ĕr(sh��)�g�����@��(g��)�����У���̖(h��o)̎������Ӌ(j��)��(sh��)ֵ�c���xֵ�Q�㣬���M(j��n)���cʮ�M(j��n)���D(zhu��n)�Q��
���@���L���ֶ̕�֮�У�ͨ�^�Լ�����،W(xu��)��(x��)�������Ŭ���cƴ��������،�(du��)��֪�R(sh��)�����c��ȡ����������Ұl(f��)�F(xi��n)���е��Լ���֪�R(sh��)�Y(ji��)��(g��u)ˮƽ��������S�࣬��(du��)֪�R(sh��)�����ճ̶�Ҳ�������S�࣬��(du��)֪�R(sh��)֮�g���(li��n)ϵҲ���˸�����˽⣻ͨ�^���������Լ����J(r��n)�R(sh��)ˮƽ�c����������،W(xu��)��(x��)�·�������˼�롢�µ�˼�S��ʽ������ظ�׃�Լ��������^�ͷ���Փ���е��Լ��������L�ҳ������S�ࣻͨ�^����ذ��n��֪�R(sh��)��(y��ng)���ڌ�(sh��)�H������ذѲ�醵����Y���c�īI(xi��n)�����õĖ|����(y��ng)���ڌ�(sh��)�F(xi��n)������ذ����W(xu��)����Փ�c������(y��ng)�����O(sh��)Ӌ(j��)֮�У��Ķ�������Լ���Փ(li��n)ϵ��(sh��)�H��������
[1] �����㣬��Ƭ�C(j��)ԭ���c��(y��ng)��(�ڶ���).����:�ƌW(xu��)������, 2004:2
[2] ������(qu��n)�������a, ����ܰ.ģ�M��Ӽ��g(sh��)���A(ch��)(��2��).����:�ߵȽ���������, 2001:121-123
[3] ꐬ�.���چ�Ƭ�C(j��)�ij����y��ϵ�y(t��ng):[�TʿՓ��],�A�пƼ���W(xu��)�Tʿ�W(xu��)λՓ��, 2004:4
[4] ��ƽ.��Փ�҇��ǽ��ٳ����z�y�x���İl(f��)չ?f��n)�r.�����|(zh��)��, 1998:56
[5] ����̽�������M.����̽��.����:������I(y��)������, 1980:32
[6] ���Q�A����ˮ��.��Ƭ�C(j��)�ڳ�����λ�y���еđ�(y��ng)��.��Ӽ��g(sh��)��(y��ng)��, 1998:157
[7] ����ϼ.��Ƭ�C(j��)�ڳ����y���еđ�(y��ng)��.��Ӽ��g(sh��), 2002:117
[8] ���.��(sh��)���·�O(sh��)Ӌ(j��)��(sh��)���փ�(c��).����:��ӹ��I(y��)������, 2003:108-110
[9] ��Ի��.����AT89C51��Ƭ�C(j��)�ij����y��ϵ�y(t��ng).늚�r(sh��)��, 2005:246
[10] ����W(xu��).��܇��܇��ײ��ֹϵ�y(t��ng)�O(sh��)Ӌ(j��).�Ϻ���܇, 2001:143-149
[11] ���Ӻ�,�����x.�����y��ϵ�y(t��ng)�Ľ�����������܇��ײϵ�y(t��ng)�đ�(y��ng)��.��܇���1997:15-16
[12] ��ïɽ.�����y��ԭ������(sh��)�`���g(sh��).��(sh��)�Üy�༼�g(sh��),����:�C(j��)е���I(y��)������, 1994:16
[13] ���x.����AT89C51�����ܷ�ײ��(b��o)�����O(sh��)Ӌ(j��).늚�r(sh��)��, 2005:89
[14] �S����.�������_�y����о�.�Ͼ�������W(xu��)�W(xu��)ʿ�W(xu��)λՓ��, 2004:215
[15] ��ȫ��, �t�s��(qi��ng).��Ƭ�C(j��)ԭ�����ӿڼ��g(sh��).����:�ߵȽ���������, 2004:12-14.
[16] ����.����CAN-BUS����܇��ײ��(b��o)��ϵ�y(t��ng)���Ɔ�Ԫ���о��_�l(f��).����:�L����
�W(xu��),2004:126
[17] ���F�t.���ٹ�·β����(c��)����ײ�A(y��)��ϵ�y(t��ng)ģ�͵��о�.����:�L����W(xu��),2004:66
[18] �w���A.���ٹ�·��ײ�A(y��)����(b��o)��ϵ�y(t��ng)���������Դ�о�.����:�L����W(xu��),2004:63
[19] �����.��܇�v������(d��ng)��ײϵ�y(t��ng)���о�.����:���A��W(xu��),2004:41
[20] Gabriel leen, Dond Heffernam,and alan Dune. Digital Networks in the AuT0motive
Vehicle.IEE Computing & Control Engineering journal. 2006:D67,216-222.
[21] A. D. C. Specification for NISSAN 172 ACC Radar System ARS100. Jun 20, 2007; 102;394-399;
[22] Miles UpT0n. Techinques For Distance Measurement SAE95. 2003:167
[23] �����g.��܇�\(y��n)�ù���.����:�˰l(f��)��ͨ������,1997:157
�� �x
�v�r(sh��)���d����Փ���x�}���Ѽ��Y�ϣ����_�}��(b��o)�桢�����嵽����(f��)�ģ����g��(j��ng)�v��ϲ�������롢ʹ������壬�ڌ���Փ�ĵ��^������������ˏ�(f��)�s������S���@ƪ���I(y��)Փ�ĵ���K�ɸ壬��(f��)�s�����韟����ɢ���Լ�����߀��һ�c(di��n)�ɾС�
�����Ҫ���x����Ĵ�W(xu��)������x�Ͼ���Ϣ���̴�W(xu��)�I���W(xu��)Ժ08��(j��)늿ư�������ώ�ͬ�W(xu��)�Լ��ҵļ��˺���Щ���h(yu��n)Ҳ������ӛ�����ѣ�������֧���c��У��������h(yu��n)��ؔ(c��i)����
 51��Ƭ�C(j��)��(sh��)�F(xi��n)�����y����(b��o)��ϵ�y(t��ng).doc
(690.05 KB, ���d��(sh��): 38)
51��Ƭ�C(j��)��(sh��)�F(xi��n)�����y����(b��o)��ϵ�y(t��ng).doc
(690.05 KB, ���d��(sh��): 38)
| �gӭ���R (http://www.zg4o1577.cn/bbs/) | Powered by Discuz! X3.1 |