1前言
1.1選題背景與意義
我們祖先抽水用的水井轱轆是一種最早的人力卷揚機。
1835年,升降機的動力由人力等其他形式的動力轉換為蒸汽為動力。
1853年,升降系統的安全保護裝置首先由美國人奧蒂斯研發出。
1858年,人們研發出帶有安全裝置的升降系統,這種升降系統可以載人,而且這種升降系統首先是以蒸汽為動力。
1903年,曳引式電梯產生,由于曳引式電梯具有種種優點,所以一直沿用至今。
1928年,集選控制電梯產生。
1949年,群控電梯產生。
1955年,開發出了由工業微型計算機控制的電梯系統。
回顧電梯的發展歷史,新技術、新理論總是不斷的在推動著電梯向前發展。之前的幾十年間,促使電梯不斷發展的是人們在乘坐電梯時的安全問題。然而在資源匱乏的今天,在考慮到電梯的安全、便捷的前提下,節能是電梯發展的重要方向。
從我們學校的圖書館來看,每天有近千次的學生來圖書館看書、上自習,然而,只有一臺電梯在工作,人流高峰期時僅靠一臺電梯根本運轉不過來,從而使得我們的圖書館的功能無法發揮極致。而我們學校的理工實驗大樓,雖然也是只有一臺電梯在運作,但是理工實驗的學生流量依靠一臺電梯完全可以有效的疏解。
1.2電梯的分類和組成
分類標準 | 內容 | ||
速度 | 丙梯 | 乙梯 | 甲梯 |
用途 | 乘客電梯 | 住宅電梯 | 載貨電梯 |
拖動方式 | 交流電梯 | 直流電梯 | 液壓電梯 |
有無司機 | 有司機電梯 | 無司機電梯 | 有/無司機電梯 |
控制方式 | 信號控制電梯 | 群控電梯 | 并聯控制電梯 |
曳引機結構 | 有齒曳引機電梯 | 無齒曳引機電梯 | ----------------- |
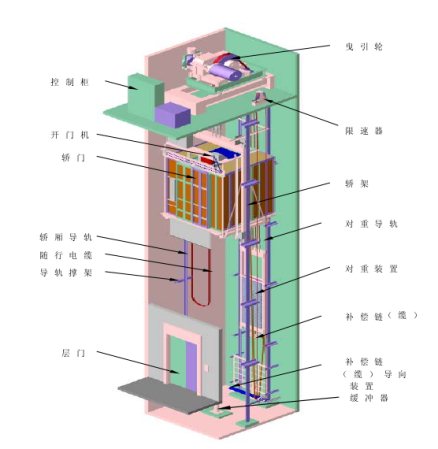
電梯的構成:
(1)曳引系統
(2)導向系統
(3)轎廂和對重系統
(4)門系統
(5)安全保護系統
(6)電氣控制系統
電梯的基本組成如圖1.1所示。
1.3電梯的發展現狀
1.3.1國外電梯發展情況
世界知名的生產電梯的公司主要有美國的奧蒂斯公司、日本三菱公司、日立公司和芬蘭科恩等公司[1]。這些比較大的電梯制造廠商由于核心技術過硬,從電梯開始發展就引領者電梯的發展潮流,而且產品性能優良所以這些大公司的主導著超過半數的全球電梯市場。
1.3.2國內電梯發展情況
在建國之后,電梯產業發展迅速,國內電梯總的保有量有較大提升,但也主要作為外國的代工廠。近年來,我國的電梯產業得到飛速的提升,發展了自己的品牌,其中較為優秀的有上海華蒂、上海三菱、上海永達。
1.4電梯新技術
現階段,國際上開發出的較為先進的電梯控制技術有以下幾個方面:
(1)全數字識別乘客技術;
(2)數字智能型安全控制技術;
(3)第四代無機房電梯技術;
(4)雙向安全保護技術;
(5)快速安裝技術;
(6)節能技術;
(7)數字監控技術;
(8)無線遠程控制及報警技術。
1.5論文的主要內容
本設計主要對八層電梯系統進行了討論和研究。特別適合于一般的大型商場。論文所進行的主要內容有以下幾個方面:
(1)查閱了電梯的發展歷史,了解到對電梯發展起至關重要的幾個階段,新技術的產生對于電梯的發展起著至關重要的角色。
(2)對變頻器和PLC進行了詳細的介紹,確定使用變頻器結合PLC對電梯拖動系統進行控制。并對比不同控制方法的優劣,以及確定使用西門子S-200PLC作為本設計的控制核心,采用安川616G5變頻器對電機進行控制。并在此基礎上對變頻器和PLC進行了選型計算。
(3)對電梯的硬件系統進行了詳細的介紹,明確了本設計所要達到的目標,進而對于變頻器的參數進行了設置,對于PLC的點數進行了分配,介紹了電梯運行的速度曲線。
(4)對于電梯的控制程序進行了設計。
2變頻器和PLC系統的概述
2.1變頻器結合PLC對電梯控制的優點
變頻器結合PLC對電梯控制有以下優點:
(1)變頻器結合PLC可以實現用程序對電梯進行控制,可使電梯更加可靠。
(2)由于不是使用繼電器對電梯進行控制,可以省去很多復雜的接線。
(3)控制程序的修改是比較容易的,所以對電梯控制系統的修改也是比較容易的。
(4)PLC功能強,所以易于實現電梯的檢修。
(5)由于PLC和變頻器的工作效率高,所以電梯的控制效率比較高。
(6)很容易改變控制方式。
(8)變頻器可以使得電梯按照既定的速度曲線運行。
(9)變頻器的使用可以明顯改變輸入功率因數,可以實現節能的效果。
2.2 PLC的概述
現代社會對產品的需求不像以前那種大批量的單一品種和規格,更加注重產品的靈活性,定制性等特點。這就要求我們的生產線能夠快速的做出調整,可編程控制器(PLC)就是為了滿足這種需求才被開發出來的,PLC產生后就迅速作為通用工業控制裝置被廣泛用于工業控制現場。
2.2.1 PLC的發展歷史
1960年在美國通用汽車公司的鼓動下,新型工業控制器PLC產生了。由于其體積小、編程簡單、可以在比較差的環境下正常工作,所以被很多廠商競相使用。1971年,美國的這項技術傳入日本,在其基礎上日本開始研發自己的可編程控制器。1974年,我國開始研發屬于自己的PLC,并于1977年逐漸應用于工業現場。
2.2.2 PLC的發展階段
PLC由于被創造出來比較晚,但是微處理器并沒有限制它的發展,反而微處理器的飛速發展帶動了PLC的飛速發展。
第一階段(20世紀60年代—20世紀70年代中期):此時PLC是繼電器控制系統的替代品[1]。
第二階段(20世紀70年代—20世紀80年代):隨著微處理器的大力發展,PLC開始采用微處理器作為CPU,大大的提高了PLC的功能[1]。
第三階段(20世紀80年代后期—至今):隨著微處理器的不斷升級,PLC的功能不斷的得到強化,速度不斷的得到提升。
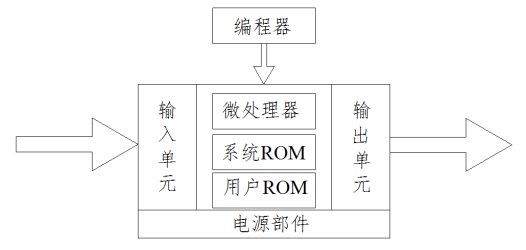
2.2.3 PLC的基本結構
PLC的結構組成如圖2.1所示。
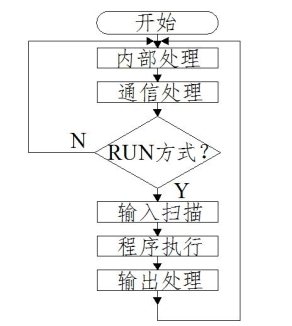
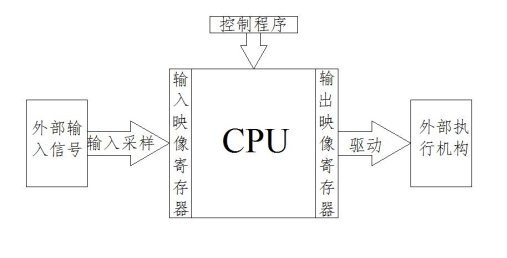
2.2.4 PLC的工作原理
它的工作原理如圖2.2所示。
2.2.5本設計對PLC的選型
本設計的控制對象的八層客梯,每個電梯的硬件完全相同,但在設計控制系統時要考慮一下幾點:
(1)對輸入/輸出點的選擇
本設計的控制對象為八層客梯,為一層到八層,所以轎廂內的樓層內呼按鈕為8個,根據實際,一層只具有上行的功能,八層只具有下行的功能,所以外呼上行和下行按鈕都為7個。除此之外,開關門按鈕、電梯層定位傳感器、限位開關等都要考慮在內。
(2)對存儲容量的選擇
對于存儲容量的確定的一般原則是沒必要過大,夠用就好,但要留有一定的裕量。
(3)對I/O響應時間的選擇
PLC的I/O響應時間包括輸入電路延遲、輸出電路延遲和掃描工作方式引起的時間延遲等[8]。
西門子公司的S7-200PLC系列產品有CPU221、CPU222、CPU224、CPU226、CPU226XM。
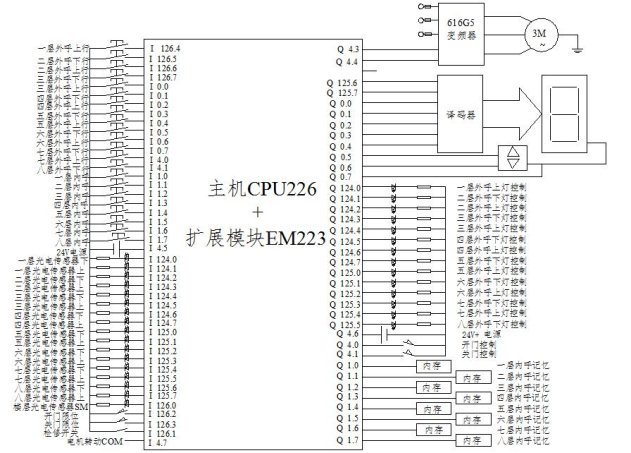
綜上所述,主機采用具有24入/16出的CPU226,擴展模塊選擇具有16入/16出的EM223。這樣它們的總的輸入/輸出為40入/ 32出。在留有余量的情況下符合了設計要求。因為要求輸出能夠帶動較大的負載所以采用繼電器輸出。PLC通過RS-484接口和電腦鏈接,依靠STEP7-Micro/WIN軟件進行編程、調試而后下載到PLC內存。
CPU221 | CPU222 | CPU224 | CPU226 | CPU226XM | |
程序存儲器 | 2048字 | 4096字 | 8192字 | ||
用戶數據存儲器 | 1024字 | 2560字 | 5120字 | ||
用戶存儲類型 | EEPROM | ||||
數據后備典型時間 | 50H | 100H | |||
本機I/O | 6入/4出 | 8入/6出 | 14入/10出 | 24入/16出 | |
擴展模塊數量 | 2個 | 7個 | |||
內置高速計數器 | 4個(30KHZ) | 6個(30KHZ) | |||
模擬量調節電位器 | 1 | 2 | |||
硬件輸入中斷 | 4個輸入點 | ||||
口令保護 | 有 | ||||
通信口數量 | 1(RS-485) | 2(RS-485) | |||
西門子PLC的主機的功能可以擴展。CPU226主機最多有7個擴展模塊。
擴展模塊有數字量模塊、模擬量模塊、智能模塊三類[9]。智能模塊用來完成一些普通模塊達不到要求的功能,如空間測距功能、濕度檢測功能。
數字量擴展模塊可參考表2.2。
型號 | 輸入點數 | 輸出點數 |
EM221 DC 24V 輸入 | 4,4 | ---- |
EM221 AC 230V 輸入 | 8點獨立 | ---- |
EM222 DC 24V 輸出 5A | ---- | 4點獨立 |
EM222 繼電器輸出 10A | ---- | 4點獨立 |
EM222 AC230 輸出 | ---- | 8點獨立 |
EM222 8點DC24V 輸出 | ---- | 4,4 |
EM222 8點繼電器輸出 | ---- | 4,4 |
EM223 DC24V 數字量4輸入/4輸出 | 4 | 4 |
EM223 DC24V 數字量4輸入/4繼電器輸出 | 4 | 4 |
EM223 DC24V 數字量8輸入/8輸出 | 4,4 | 4,4 |
EM223 DC24V 數字量8輸入/8繼電器輸出 | 4,4 | 4,4 |
EM223 DC24V 數字量16輸入/16繼電器輸出 | 8,8 | 4,4,8 |
EM223 DC24V 數字量16輸入/16輸出 | 8,8 | 4,4,4,4 |
模擬量擴展模塊可參考表2.3。
模塊 | EM231 | EM232 | EM235 |
點數 | 4入 | 2出 | 4入 ,1出 |
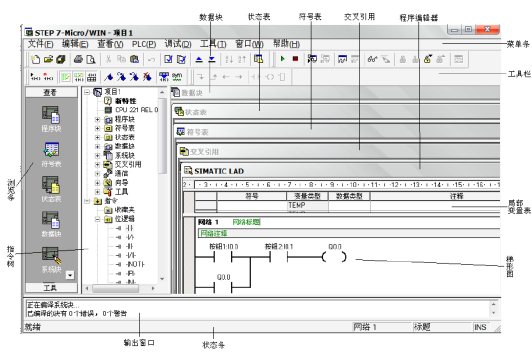
2.3 STEP7-Micro/WIN編程軟件概述
STEP7-Micro/WIN編程軟件是西門子公司專為S7-200系列PLC設計和開發的程序編輯軟件。它功能強大、易學易用,可以方便的用來開發用戶程序。
2.3.1 STEP7-Micro/WIN軟件的窗口組件
STEP7-Micro/WIN的窗口組件如圖2.3所示。
2.4變頻器概述
2.4.1變頻器簡介
通過輸入頻率的變換,可以使得交流電機的速度調節變得非常容易,所以變頻器的產生有非常重要影響。現代社會中交-直-交變頻器的應用最為廣泛,其工作框圖如圖2.4所示。

2.4.2變頻器的分類
變頻器分類:
(1)按變換頻率的方法分:
交—直—交變頻器
交—交變頻器
(2)按主電路分:
電壓變頻器
電流變頻器
(3)按變頻器調壓方法分:
PAM變頻器
PWM變頻器
(4)按工作原理分:
U/F控制變頻器
轉差頻率控制變頻器
矢量控制通用變頻器
直接轉矩控制變頻器
(5)按照用途分:
通用變頻器
高性能專用變頻器
高頻變頻器
2.4.3變頻器的調速原理
式中n0——同步轉速;
f——電源頻率,單位為HZ;
p——電動機極對數;
s——電動機轉差率。
由公式可知,改變電源的頻率、電動機極對數或電動機轉差率即可實現調速[1]。
設計中應該保持磁通不變,因為磁通變大變小都會對電機的運行帶來不利的影響。即:
式中E1——電動機定子每相電動勢;
f1——電動機定子頻率;
N1——定子每相繞組有效匝數;
Φm——每極磁通量。
公式可知,要使Φm保持基本不變,必須保持E1和f1的比例不變或者微小變化[1]。
2.4.4變頻器的主要功能
(1)頻率給定功能;
(2)加減速時間設置功能;
(3)加減速模式選擇功能;
(4)節能功能;
(5)保護功能。
變頻器產品說明書都提高標稱功率數據,但實際上限制變頻器使用功率的是定子電流參數[4]。
選擇方式:
(1)按標稱功率;
(2)按電動機額定電流;
(3)按電動機實際流通電流;
(4)按轉矩過載能力。
綜上所述,以錯誤的方式選擇變頻器將會對系統造成很大的影響。基本上所選的變頻器的標稱功率和電動機的功率是符合的,只有在比較極端的情況下是需要大一點的。所以,不能簡單的依據高一級的功率來選擇變頻器,那樣會造成浪費的。
變頻器應滿足的條件:
(1)根據負載特性選型;
(2)所選類型與符合電機參數;
(3)首選通用變頻器;
(4)能使電梯平穩起停;
(5)有防失速功能;
(6)轉矩特性好。
(7)理想速度曲線運行
(8)節能
綜上所述,這個設計中的變頻器采用VS-616G5通用變頻器。
這種變頻器具有如下特點:
(1)具有標準的四種控制方式。
(2)選擇功能豐富。
(3)功能全、體積小。
(4)便于維修。
(5)采用LCD操作裝置,具有較高的操作性能。
常用參數如表2.4所示。
參數 | 功用 |
A組 | 確定控制模式 |
B組 | 選擇運行功能 |
C組 | 確定加減速時間和轉矩補償時間 |
D組 | 選擇頻率 |
E組 | 確定運行壓頻曲線 |
F組 | 保護設置 |
H組 | 確定偏差標準 |
變頻器參數設計原則:
(1)減小啟動沖擊及增加調速的舒適感,其速度環比例系數宜小些,而積分時間常數宜大些[3];
(2)高速運行時頻率應為50 HZ,低速運行時頻率小于50 HZ;
(3)零速一般設計為0HZ,速抱閘功能將影響舒適感[3]。
變頻器容量計算
設電梯曳引電機功率為Py。
電梯運行平均速度為V。
電梯自身重量為G1。
轎廂內乘客總重為G2。
電梯所帶配重為G3。
重力加速度為g。
變頻器功率為P。
電梯爬升所需功率為Pon:
![]() (2-3)
(2-3)
其中![]() 為摩擦力,δ可忽略不計。
為摩擦力,δ可忽略不計。
變頻器功率P應接近電機功率Py,既是Pon留有安全余量[4]。
可取![]() 。
。
![]()
![]()
![]()
![]()
![]()
所以:![]()
有所以:![]()
根據計算結果選1.5倍余量,參考變頻器功率等級,所得變頻器功率為15![]() 。
。
變頻器制動電阻參數的計算
考慮到成本因素本設計采用能耗制動方式。
能耗制動電阻RZ與制動電流IZ的關系為:
式中UD ——直流母線電壓;
RZ ——制動電阻;
IZ ——制動電流。
(1)轎廂升降拖動系統
轎廂拖動系統如圖3.1所示。

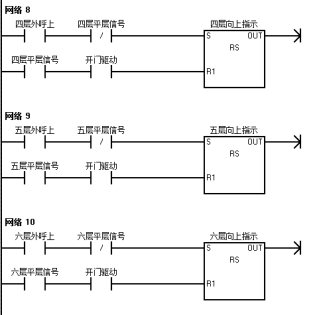
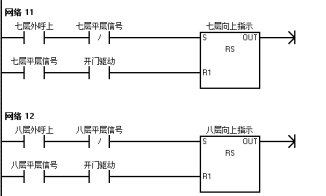
(2)電梯的呼叫系統和指示系統
內選和外呼組成了電梯的呼叫系統。
(3)電梯安全保護系統
為保證電梯的安全運行,保障乘客的人身安全和貨物的安全,電梯系統中設有各種安全裝置[1]。
(1)電梯應該具有能夠自動工作的能力,而且當電梯檢修時應該具有強制工作的工作模式;
(2)電梯應該能夠按照設定的速度曲線運行;
(3)當電梯上行時優先執行比當前層高的內選信號,下行同理;
(4)內選按鈕或外呼按鈕時應該有對應的指示燈發光;
(5)電梯的開始運行、運行結束和到達目的層均應該有語音播報;
(6)當有障礙物在門間的感應區時執行開門指令;
(7)當轎廂所載乘客重量大于預設值時,系統執行開門指令,并發出警示音提醒;
(8)當轎廂行駛與層門、轎廂門的打開形成互鎖;
(9)安全保護裝置應該充分應用到電梯的各個系統中。
如圖3.2所示。
輸入地址如表3.1所示。
數字量輸入點:
(1)各樓層外呼狀態指示燈
(2)各樓層內選按鈕
(3)各樓層平層光電傳感器(![]() )
)
(4)開門到位
(5)關門到位
(6)檢修按鈕
(7)電機轉動COM
(8)24V電源
(9)各樓層平層信號SM
一層外呼上行 | I 126.4 | BOOL | 一層光電傳感器(中)下 | I 124.0 | BOOL |
二層外呼下行 | I 126.5 | BOOL | 一層光電傳感器(中)上 | I 124.1 | BOOL |
二層外呼上行 | I 126.6 | BOOL | 二層光電傳感器(中)下 | I 124.2 | BOOL |
三層外呼下行 | I 126.7 | BOOL | 二層光電傳感器(中)上 | I 124.3 | BOOL |
三層外呼上行 | I 0.0 | BOOL | 三層光電傳感器(中)下 | I 124.4 | BOOL |
四層外呼下行 | I 0.1 | BOOL | 三層光電傳感器(中)上 | I 124.5 | BOOL |
四層外呼上行 | I 0.2 | BOOL | 四層光電傳感器(中)下 | I 124.6 | BOOL |
五層外呼下行 | I 0.3 | BOOL | 四層光電傳感器(中)上 | I 124.7 | BOOL |
五層外呼上行 | I 0.4 | BOOL | 五層光電傳感器(中)下 | I 125.0 | BOOL |
六層外呼下行 | I 0.5 | BOOL | 五層光電傳感器(中)上 | I 125.1 | BOOL |
六層外呼上行 | I 0.6 | BOOL | 六層光電傳感器(中)下 | I 125.2 | BOOL |
七層外呼下行 | I 0.7 | BOOL | 六層光電傳感器(中)上 | I 125.3 | BOOL |
七層外呼上行 | I 4.0 | BOOL | 七層光電傳感器(中)下 | I 125.4 | BOOL |
八層外呼下行 | I 4.1 | BOOL | 七層光電傳感器(中)上 | I 125.5 | BOOL |
一層內呼 | I 1.0 | BOOL | 八層光電傳感器(中)下 | I 125.6 | BOOL |
二層內呼 | I 1.1 | BOOL | 八層光電傳感器(中)上 | I 125.7 | BOOL |
三層內呼 | I 1.2 | BOOL | 樓層光電傳感器(中)SM | I 126.0 | BOOL |
四層內呼 | I 1.3 | BOOL | 電機轉動COM | I 4.7 | BOOL |
五層內呼 | I 1.4 | BOOL | 24V電源 | I 4.5 | BOOL |
六層內呼 | I 1.5 | BOOL | 檢修開關 | I 126.1 | BOOL |
七層內呼 | I 1.6 | BOOL | 開門到位 | I 126.2 | BOOL |
八層內呼 | I 1.7 | BOOL | 關門到位 | I 126.3 | BOOL |
輸出地址如表3.2所示。
數字量輸出點:
(1)數碼管各段顯示
(2)數碼管上/下箭頭控制顯示
(3)各樓層內呼記憶
(4)開/關門控制
(5)電機正/反轉控制
(6)電機啟動/停止控制
(7)24V+電源
(8)各樓層外呼燈控制
數碼管A段 | Q 125.6 | BOOL | 關門控制 | Q 4.1 | BOOL |
數碼管B段 | Q 125.7 | BOOL | 電機正反轉 | Q 4.3 | BOOL |
數碼管C段 | Q 0.0 | BOOL | 電機起停 | Q 4.4 | BOOL |
數碼管D段 | Q 0.1 | BOOL | 24V+電源 | Q 4.6 | BOOL |
數碼管E段 | Q 0.2 | BOOL | 一層外呼上燈控制 | Q 124.0 | BOOL |
數碼管F段 | Q 0.3 | BOOL | 二層外呼下燈控制 | Q 124.1 | BOOL |
數碼管G段 | Q 0.4 | BOOL | 二層外呼上燈控制 | Q 124.2 | BOOL |
數碼管向下箭頭 | Q 0.5 | BOOL | 三層外呼下燈控制 | Q 124.3 | BOOL |
數碼管向上箭頭 | Q 0.6 | BOOL | 三層外呼上燈控制 | Q 124.4 | BOOL |
數碼管負極 | Q 0.7 | BOOL | 四層外呼下燈控制 | Q 124.5 | BOOL |
一層內呼記憶 | Q 1.0 | BOOL | 四層外呼上燈控制 | Q 124.6 | BOOL |
二層內呼記憶 | Q 1.1 | BOOL | 五層外呼下燈控制 | Q 124.7 | BOOL |
三層內呼記憶 | Q 1.2 | BOOL | 五層外呼上燈控制 | Q 125.0 | BOOL |
四層內呼記憶 | Q 1.3 | BOOL | 六層外呼下燈控制 | Q 125.1 | BOOL |
五層內呼記憶 | Q 1.4 | BOOL | 六層外呼上燈控制 | Q 125.2 | BOOL |
六層內呼記憶 | Q 1.5 | BOOL | 七層外呼下燈控制 | Q 125.3 | BOOL |
七層內呼記憶 | Q 1.6 | BOOL | 七層外呼上燈控制 | Q 125.4 | BOOL |
八層內呼記憶 | Q 1.7 | BOOL | 八層外呼下燈控制 | Q 125.5 | BOOL |
開門控制 | Q 4.0 | BOOL | |||
本設計中電梯的運行速度曲線可采用下面兩種方法:
(1)線性加速方式
圖3.3給出了f與t。0~t1電梯加速,t2~t3 電梯減速。線性速度曲線可以在很大的程度上滿足乘客乘坐電梯的舒適性,而且滿足平層要求。

(2) S形加速方式
如圖3.4所示。當電梯以S形曲線運行是會給乘客帶來更高的舒適度。
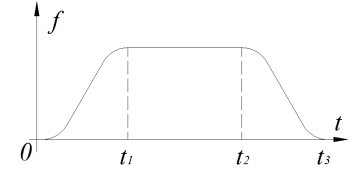
表3.3為616G5變頻器參數設置參考說明。
參數 | 名稱 | 設定值 | 說明 |
A1-02 | 控制方式選擇 | 2 | 不帶PG矢量控制方式 |
B1-01 | 頻率指令選擇 | 1 | |
B1-02 | 運行指令選擇 | 1 | |
B1-03 | 停止方法選擇 | 0 | |
B1-04 | 反轉禁止選擇 | 0 | |
B2-01 | 零速電平選擇 | 0.1HZ | |
B2-04 | 停止時直流制動時間 | 1.0S | |
C1-03 | 加速時間2 | 2.0S | |
C1-04 | 減速時間2 | 2.0S | |
C2-01 | 加速開始時S型曲線時間 | 0.6S | |
C2-02 | 加速完成時S型曲線時間 | 0.6S | |
C2-03 | 減速開始時S型曲線時間 | 0.6S | |
C2-04 | 減速結束時S型曲線時間 | 0.6S | |
C5-01 | ASR比例增益1 | 5 | |
C5-02 | ASR積分時間1 | 3S | |
D1-09 | 檢修速度 | 200rpm | |
E1-01 | 輸入電壓設置 | 380V | |
E1-04 | 最高輸出頻率 | 50HZ | |
E1-05 | 最大電壓 | 380 | |
E1-06 | 額定電壓頻率 | 50HZ | |
E1-09 | 最低輸出頻率電壓 | 0V | |
E2-01 | 電機額定電流 | 依據電機名牌設置 | |
E2-02 | 電機額定滑差 | 依據電機名牌設置 | |
E2-03 | 電機空載電流 | 依據電機名牌設置 | |
E2-04 | 電機極數 | 依據電機名牌設置 | |
F1-01 | PG常數 | 根據旋轉編碼器名牌設置 | |
F1-02 | PG斷線檢測時的動作選擇 | 0 | |
F1-03 | 超速時的動作選擇 | 0 | |
F1-04 | 超度偏差過大 | 0 | |
F1-05 | PG分頻比 | 根據電機極數設置 |
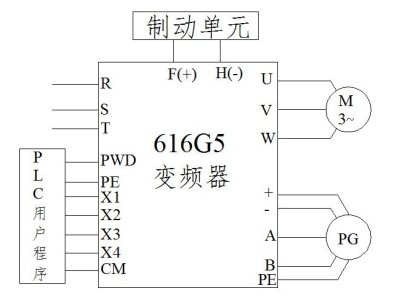
安川616G5變頻器電氣原理圖如圖3.5所示。
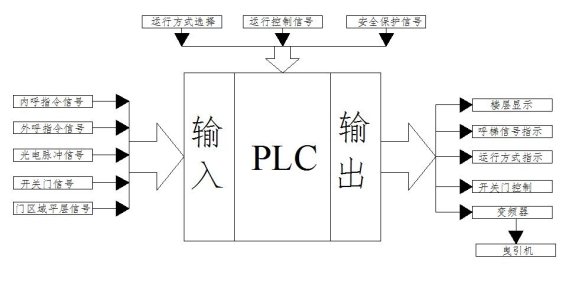
電梯系統是以PLC控制系統為核心的,圖3.6示出了PLC控制的系統示意圖。
PLC電氣原理圖如圖3.7所示。
S7-200常用的指令表達方式有三種:梯形圖、指令表、功能圖[1]。
(1)位表示格式:標識符I 地址,例如I124.7。
(2)字節表示格式:標識符B 地址,例如IB10。
(3)字表示格式:標識符W 地址,例如MW2。
(4)雙字表示格式:標識符D 地址,例如SMD4。
(1)基本邏輯“與”、“或”、“非”運算;
(2)置位、復位指令;
(3)定時器指令;
(4)計數器指令;
(5)比較操作指令。
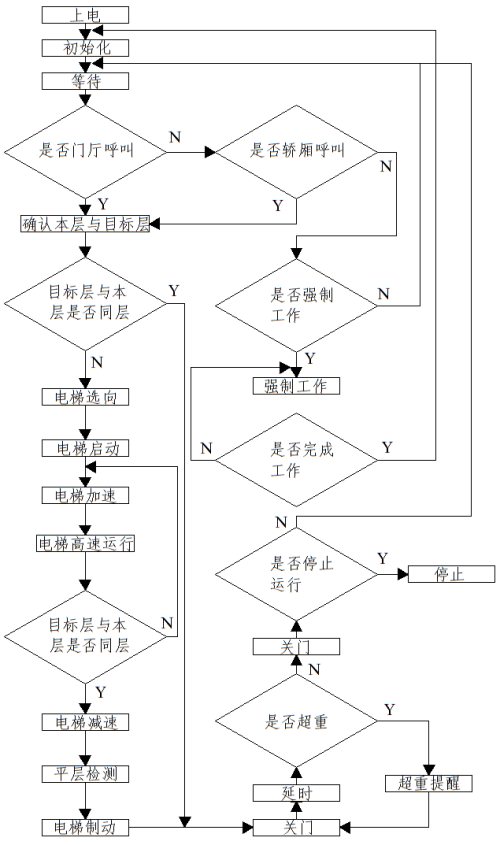
(1)自檢:電梯的自檢既是電梯在運行之前的自我檢測,通過此種方式來確定電梯是否能夠正常運行。
(2)自動工作:當有高于轎廂所在層的內選信號或者外呼信號時,控制系統來確定轎廂的運行方向,而后拖動系統按照變頻器輸出的S形曲線運行,到達目標層后,減速停止,并抱閘。延時一段時間執行關門指令。而后響應下一個內選或外呼信號。
(3)強制工作:強制工作模式的建立是為了應對電梯出現故障時的電梯檢修。在這種工作狀態下,不接受其他的內選和外呼信號,并且,在工程師的操縱下電梯應該可以運行到導軌上下極限的任意位置。
電梯工作流程圖如圖4.2所示。
此自動開關門程序由模擬電位器實現。其梯形圖如圖4.3所示。

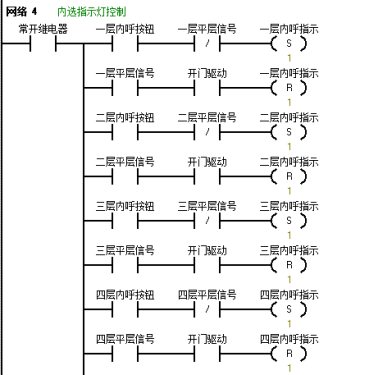
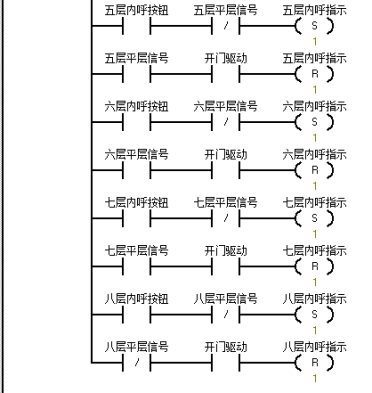
(1)內選指示燈
轎廂內控制面板上裝有每層電梯的控制按鈕。按下按鈕,指示燈亮。其參考程序如圖4.4梯形圖所示。
(2)外呼指示燈
它的參考程序如圖4.5梯形圖所示。

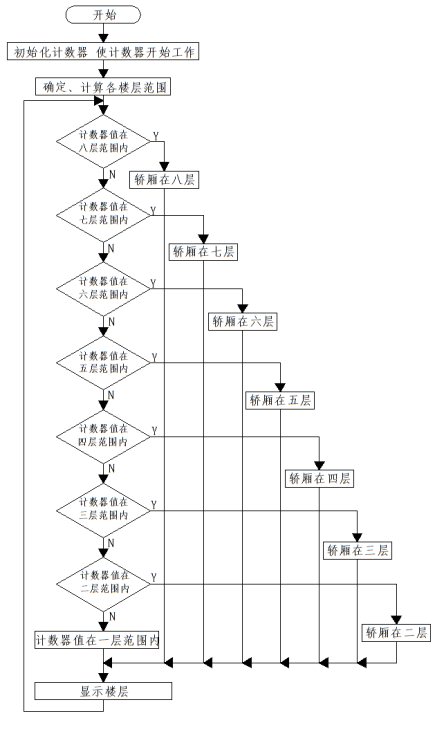
本設計用七段數碼管來顯示電梯的實時位置。隨著轎廂位置的改變而不斷的變化。其程序流程圖如圖4.6所示。
轎廂自動開關門的程序流程如圖4.7所示。

如圖4.8所示電梯上下行程序流程圖。
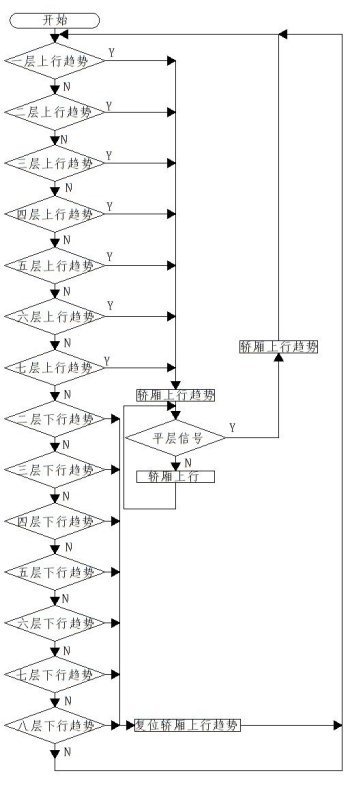
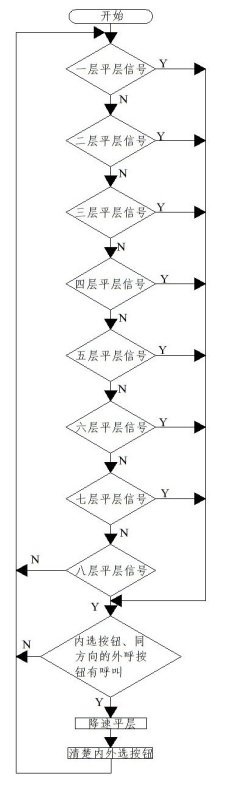
圖4.9所示平層控制程序流程圖。
如圖4.10示出了電梯的總體運行效果圖。

本設計主要對八層電梯系統進行了討論和研究。本設計方案具有性能穩定、產品成型時間短、以及乘坐舒適、安全等特點。特別適合于一般的大型商場。論文所進行的主要內容有以下幾個方面:
(1)查閱了電梯的發展歷史,了解到對電梯發展起至關重要的幾個階段,新技術的產生對于電梯的發展起著至關重要的角色。
(2)對變頻器和PLC進行了詳細的介紹,確定使用變頻器結合PLC對電梯拖動系統進行控制。并對比不同控制方法的優劣,以及確定使用西門子S-200PLC作為本設計的控制核心,采用安川616G5變頻器對電機進行控制。并在此基礎上對變頻器和PLC進行了選型計算。
(3)對電梯的硬件系統進行了詳細的介紹,明確了本設計所要達到的目標,進而對于變頻器的參數進行了設置,對于PLC的點數進行了分配,介紹了電梯運行的速度曲線。
(4)對于電梯的控制程序進行了設計。
電梯系統的組成涵蓋了多種技術、多種學科。相對于其他系統而言電梯控制系統比較復雜,非常綜合,涉及的課題較多,工作量較大。結合實際,作者做出以下幾方面的展望。
(1)實際中一般商場會有地下一層、地下二層,由于考慮到系統的復雜性,在本設計中沒有考慮進去,而是直接從地上一層到地上八層進行的設計,所以在進一步的研究中要把地下停車場考慮進去。
(2)本設計為一臺電梯的控制系統,然而實際上商場客流量非常大,一臺電梯有時并不能滿足需求,比較大的商場里面一般一個電梯見里面有三部或是四部電梯采用群控方式控制。所以在進一步的研究中應以群控系統為主。
(3)目前,電梯的運行單單僅靠編好的程序,就是那里有呼叫信號,轎廂向哪個樓層運行。沒有考慮到樓層人數多少的影響。有時上班高峰一樓聚集了很多人,等待上八樓。五樓和六樓都有一個人等待上八樓。假如現在電梯在八樓則電梯會先去響應五樓和六樓的呼叫只有分別送五樓和六樓的人上了八樓,電梯才會到一樓,送一樓的人上八樓。這樣就給數量多的人造成了麻煩。所以電梯應該具有智能系統,可以自行統計某一時間段,某一樓層人數,而后按照人數自動調節,首先響應人數多的樓層。
致謝
至此畢業設計完成之際,我由衷的感謝吳艷敏老師給予的悉心教導和指點。她博學多識、誨人不倦給我解答了很多疑難問題,這次畢業設計我才能順利的完成。感謝負責此次畢業設計的教務組的老師們,感謝他們為此次畢業設計所做的充分準備,和耐心的督促。幾年的大學時光對我來說是非常寶貴的,感謝所有授課的老師們,正是由于他們的教導和支持,使我學到了扎實的專業基礎知識。感謝我的父母,是他們無私的支持讓我可以走到現在。
完整的Word格式文檔51黑下載地址:
 多層電梯控制.doc
(1.22 MB, 下載次數: 29)
多層電梯控制.doc
(1.22 MB, 下載次數: 29)
| 歡迎光臨 (http://www.zg4o1577.cn/bbs/) | Powered by Discuz! X3.1 |