
2014級測控技術與儀器專業綜合課程設計
目 錄
摘 要 I
1 設計任務書
1.1 涉及專業課程 (1)
1.2 設計任務 (1)
1.3 設計目標 (1)
1.4 本設計的主要功能 (2)
1.5 本章小結 (2)
2 設計論證及計劃
2.1 課程設計背景及設計意義 (3)
2.2 設計采用軟件及規劃 (3)
2.3 本章小結 (4)
3 硬件系統設計
3.1 總體方案設計 (5)
3.2 元器件的選型及分析 (5)
3.3 系統模塊功能及接口設計 (13)
3.4 本章小結 (15)
4 軟件系統設計
4.1 軟件系統總體方案設計 (16)
4.2 軟件流程設計 (16)
4.3 程序代碼設計與分析 (17)
4.4 本章小結 (23)
5 程序載入與調試
5.1 調試環境與工具 (24)
5.2 調試過程及現象分析 (24)
6 總結與展望
6.1 課程設計總結 (30)
6.2 工作展望 (30)
附 錄A 設計程序 (31)
附 錄 B 設計參考資料 (37)
2014級測控技術與儀器專業綜合課程設計
1 設計任務書
- 涉及專業課程
本設計主要涉及的專業課程有:
1、單片機原理及應用
2、信號分析與處理
3、計算機控制技術
4、傳感器技術
5、電子線路CAD
6、數字電子技術
7、復變函數與積分變換
- 設計任務
- 設計目標
根據設計任務并完成以下目標
- 了解六軸傳感器MPU6050工作原理以及其工作方式。
- 熟練運用ARM完成對傳感器的操作與控制;
- 傳感器數據通過串口通信在上位機上模擬顯示;
- 系統與手機通過藍牙進行數據傳輸;
- 本設計的主要功能
- 本設計的主要功能
- 本章小結
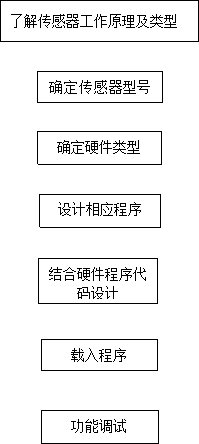
結合所學課程和設計任務,制定了相應的工作任務,合理規劃工作步驟。
2 設計論證及計劃- 課程設計背景及設計意義
- 設計采用軟件及設計規劃
- 本章小結
- 總體設計方案
- 元器件的選型及分析
3.2.1MCU的選型及分析
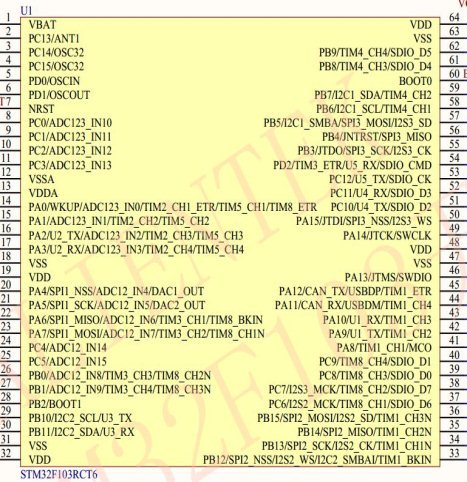
STM32F103RCT6原理圖,如圖3.2所示。
圖3.2 MCU原理圖
3.2.2 傳感器的選型及分析
① 以數字形式輸出 6 軸或 9 軸(需外接磁傳感器)的旋轉矩陣、四元數(quaternion)、歐拉角格式的融合演算數據(需 DMP 支持)。

MPU6050傳感器實物圖如3.3所示,其檢測軸如圖3.4所示。
3.3 MPU6050實物圖
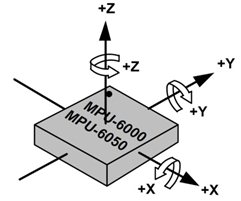
圖3.4 MPU605檢測軸方向
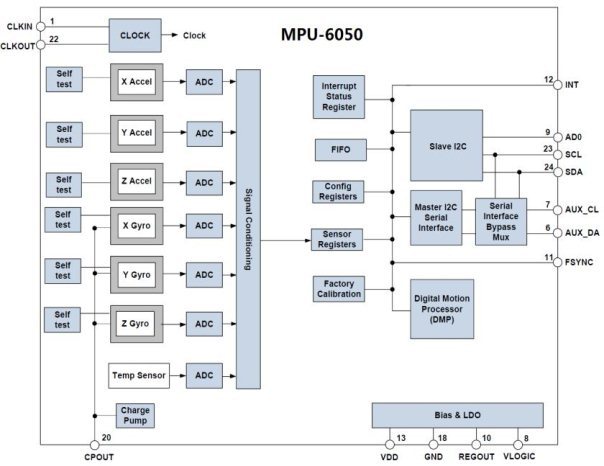
MPU6050的內部框圖如圖3.5所示。

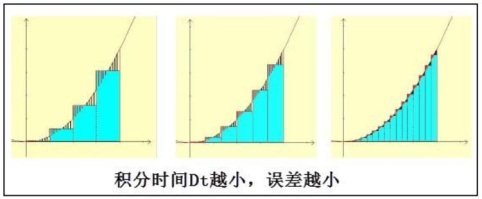
陀螺儀檢測也不是完全精確的,存在一定的誤差。由于陀螺儀測量角度時使用積

由于直接用陀螺儀測量角度在長時間測量時會產生累計誤差,引入了檢測傾角的傳感器。測量傾角最常見的例子是建筑中使用的水平儀,在重力的影響下,水平儀內的氣泡能大致反映水柱所在直線與重力方向的夾角關系,利用圖3.8中的T字型水平儀,可以檢測出橫滾角與俯仰角,而偏航角是無法以這樣的方式檢測的。在電子設備中,一般使用加速度傳感器來檢測傾角,它通過檢測器件在各個方向的形變情況而采樣得到受力數據,根據F=ma轉換,傳感器直接輸出加速度數據,因而被稱為加速度傳感器。由于地球存在重力場,所以重力在任何時刻都會作用于傳感器,當傳感器靜止的時候(實際上加速度為0),傳感器會在該方向檢測出加速度g,不能認為重力方向測出的加速度為g,就表示傳感器在該方向作加速度為g的運動。
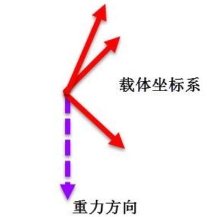
當傳感器的姿態不同時,它在自身各個坐標軸檢測到的重力加速度是不一樣利用
各方向的測量結果,根據力的分解原理,可求出各個坐標軸與重力之間的夾角,如圖3.9所示。
- 系統模塊功能及接口設計
MPU6050引腳說明
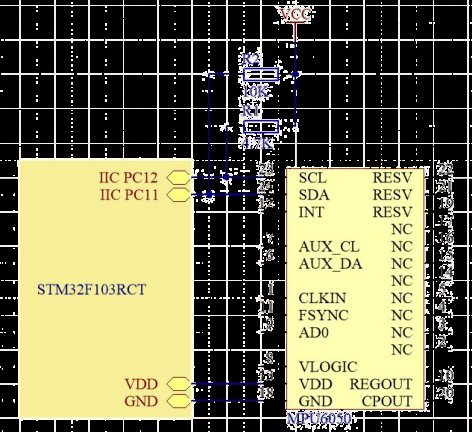
所要用到的硬件資源主要有STM32開發板和MPU6050模塊,它們的連接方式如圖3.10所示。MPU6050模塊與外部連接,引出了VCC、GND、IIC_SDA、IIC_SCL、MPU_INT和MPU_AD0等信號。其中,IIC_SDA和IIC_SCL帶了4.7K上拉電阻,外部可以不用再加上拉電阻了,另外MPU_AD0自帶了10K下拉電阻,當AD0 懸空時,默認IIC地址為(0X68)。模塊的IIC_SCL、IIC_SDA分別連接在STM32的PC12、PC11上面。XDA和XCL是用來擴展連接磁力傳感器使MPU6050轉換為“九軸傳感器”。
- 本章小結
4 軟件系統設計
- 軟件系統總體方案設計
- 軟件流程設計
- 程序代碼設計與分析
- 主函數代碼設計與分析
- 主函數代碼設計與分析
- 以下是main函數中中最主要的部分程序
- 串口發送程序:
- void usart1_send_char(u8 c)
- {
- while((USART1->SR&0X40)==0);//等待上一次發送完畢
- USART1->DR=c;
- }
- //傳送數據給上位機軟件(
- void usart1_niming_report(u8 fun,u8*data,u8 len)
- {
- u8 send_buf[32];
- u8 i;
- if(len>28)return; //最多28字節數據
- send_buf[len+3]=0; //校驗數置零
- send_buf[0]=0X88; //幀頭
- send_buf[1]=fun; //功能字
- send_buf[2]=len; //數據長度
- for(i=0;i<len;i++)send_buf[3+i]=data[i]; //復制數據
- for(i=0;i<len+3;i++)send_buf[len+3]+=send_buf[i]; //計算校驗和
- for(i=0;i<len+4;i++)usart1_send_char(send_buf[i]); //發送數據到串口1
- }
- //發送加速度傳感器數據和陀螺儀數據
- //aacx,aacy,aacz:x,y,z三個方向上面的加速度值
- //gyrox,gyroy,gyroz:x,y,z三個方向上面的陀螺儀值
- void mpu6050_send_data(short aacx,short aacy,short aacz,short gyrox,short gyroy,short gyroz)
- 通過串口上報結算后的姿態數據給電腦:
- //aacx,aacy,aacz:x,y,z三個方向上面的加速度值
- //gyrox,gyroy,gyroz:x,y,z三個方向上面的陀螺儀值
- //roll:橫滾角.單位0.01度。 -18000 - 18000 對應 -180.00 - 180.00度
- //pitch:俯仰角.單位 0.01度。-9000 - 9000 對應 -90.00 - 90.00 度
- //yaw:航向角.單位為0.1度 0 – 360。0度 對應 0 -> 360.0度
- void usart1_report_imu(short aacx,short aacy,short aacz,short gyrox,short gyroy,short gyroz,short roll,short pitch,short yaw)
- LCD初始化:
- int main(void)
- {
- u8 t=0,report=1; //默認開啟上報
- u8 key;
- float pitch,roll,yaw; //歐拉角
- short aacx,aacy,aacz; //加速度傳感器原始數據
- short gyrox,gyroy,gyroz; //陀螺儀原始數據
- short temp; //溫度
- NVIC_PriorityGroupConfig(NVIC_PriorityGroup_2);
- delay_init(); //延時函數初始化
- uart_init(500000); //串口初始化為9600
- usmart_dev.init(72); //初始化USMART
- LED_Init(); //初始化與LED連接的硬件接口
- KEY_Init(); //初始化按鍵
- LCD_Init(); //初始化LCD
- MPU_Init(); //初始化MPU6050
- POINT_COLOR=RED; //設置字體為紅色
- 顯示屏顯示數據:
- LCD_ShowString(30,50,200,16,16,"Wang Kai");
- LCD_ShowString(30,70,200,16,16,"MPU6050 TEST");
- LCD_ShowString(30,90,200,16,16,"HPU");
- LCD_ShowString(30,110,200,16,16,"2018/3/12");
- while(mpu_dmp_init())
- {
- LCD_ShowString(30,130,200,16,16,"MPU6050 Error");
- delay_ms(200);
- LCD_Fill(30,130,239,130+16,WHITE);
- delay_ms(200);
- }
- LCD_ShowString(30,130,200,16,16,"MPU6050 OK");
- LCD_ShowString(30,150,200,16,16,"KEY0:UPLOAD ON/OFF");
- POINT_COLOR=BLUE;//設置字體為藍色
- LCD_ShowString(30,170,200,16,16,"UPLOAD ON ");
- LCD_ShowString(30,200,200,16,16," Temp: . C");
- LCD_ShowString(30,220,200,16,16,"Pitch: . C");
- LCD_ShowString(30,240,200,16,16," Roll: . C");
- LCD_ShowString(30,260,200,16,16," Yaw : . C");
- LCD_ShowString(30,280,200,16,16," Durriculum Design ");
- if(mpu_dmp_get_data(&pitch,&roll,&yaw)==0)
- {
- temp=MPU_Get_Temperature(); //得到溫度值
- MPU_Get_Accelerometer(&aacx,&aacy,&aacz); //得到加速度傳感器數據
- MPU_Get_Gyroscope(&gyrox,&gyroy,&gyroz); //得到陀螺儀數據
- if(report)mpu6050_send_data(aacx,aacy,aacz,gyrox,gyroy,gyroz);//用自定義幀發送加速度和陀螺儀原始數據
- 原始數據處理: if(report)usart1_report_imu(aacx,aacy,aacz,gyrox,gyroy,gyroz,(int)(roll*100),(int)(pitch*100),(int)(yaw*10));
- if((t%10)==0)
- {
- if(temp<0)
- {
- LCD_ShowChar(30+48,200,'-',16,0); //顯示負號
- temp=-temp; //轉為正數
- }else LCD_ShowChar(30+48,200,' ',16,0);//去掉負號
- LCD_ShowNum(30+48+8,200,temp/100,3,16);//顯示整數部分 LCD_ShowNum(30+48+40,200,temp%10,1,16);//顯示小數部分 temp=pitch*10;
- if(temp<0)
- {
- LCD_ShowChar(30+48,220,'-',16,0); //顯示負號
- temp=-temp; //轉為正數
- }else LCD_ShowChar(30+48,220,' ',16,0);//去掉負號
- LCD_ShowNum(30+48+8,220,temp/10,3,16); //顯示整數部分 LCD_ShowNum(30+48+40,220,temp%10,1,16); //顯示小數部分
- temp=roll*10;
- if(temp<0)
- {
- LCD_ShowChar(30+48,240,'-',16,0); //顯示負號
- temp=-temp; //轉為正數
- }else LCD_ShowChar(30+48,240,' ',16,0);//去掉負號
- LCD_ShowNum(30+48+8,240,temp/10,3,16); //顯示整數部分
- LCD_ShowNum(30+48+40,240,temp%10,1,16);//顯示小數部分
- temp=yaw*10;
- if(temp<0)
- {
- LCD_ShowChar(30+48,260,'-',16,0); //顯示負號
- temp=-temp; //轉為正數
- }else LCD_ShowChar(30+48,260,' ',16,0);//去掉負號
- LCD_ShowNum(30+48+40,260,temp%10,1,16);//顯示小數部分
- t=0;
- LED0=!LED0;//LED閃爍
- }
- }
-
- 4.3.2 MPU6050程序分析
- MPU6050程序初始化:
- u8 MPU_Init(void)
- {
- u8 res;
- MPU_IIC_Init();//初始化IIC總線
- MPU_Write_Byte(MPU_PWR_MGMT1_REG,0X80); //復位MPU6050
- delay_ms(100);
- MPU_Write_Byte(MPU_PWR_MGMT1_REG,0X00); //喚醒MPU6050
- MPU_Set_Gyro_Fsr(3); //陀螺儀傳感器,±2000dps
- MPU_Set_Accel_Fsr(0); //加速度傳感器,±2g
- MPU_Set_Rate(50); //設置采樣率50Hz
- MPU_Write_Byte(MPU_INT_EN_REG,0X00); //關閉所有中斷
- MPU_Write_Byte(MPU_USER_CTRL_REG,0X00);//I2C主模式關閉
- MPU_Write_Byte(MPU_FIFO_EN_REG,0X00); //關閉FIFO
- MPU_Write_Byte(MPU_INTBP_CFG_REG,0X80);//INT引腳低電平有效
- res=MPU_Read_Byte(MPU_DEVICE_ID_REG);
- if(res==MPU_ADDR)//器件ID正確
- {
- MPU_Write_Byte(MPU_PWR_MGMT1_REG,0X01);//設置CLKSEL,PLL X軸為參考
- MPU_Write_Byte(MPU_PWR_MGMT2_REG,0X00);//加速度與陀螺儀都工作
- MPU_Set_Rate(50); //設置采樣率為50Hz
- }else return 1;
- return 0;
- }
- //設置MPU6050陀螺儀傳感器滿量程范圍
- //fsr:0,±250dps;1,±500dps;2,±1000dps;3,±2000dps
- //返回值:0,設置成功
- // 其他,設置失敗
- u8 MPU_Set_Gyro_Fsr(u8 fsr)
- {
- return MPU_Write_Byte(MPU_GYRO_CFG_REG,fsr<<3);//設置陀螺儀滿量程范圍
- }
- 設置MPU6050加速度傳感器滿量程范圍
- //fsr:0,±2g;1,±4g;2,±8g;3,±16g
- //返回值:0,設置成功
- // 其他,設置失敗
- u8 MPU_Set_Accel_Fsr(u8 fsr)
- {
- return MPU_Write_Byte(MPU_ACCEL_CFG_REG,fsr<<3);//設置加速度傳感器滿量程范圍
- }
- //設置MPU6050的數字低通濾波器
- //lpf:數字低通濾波頻率(Hz)
- //返回值:0,設置成功
- // 其他,設置失敗
- 本章小結
5 程序載入與調試
- 調試環境與工具
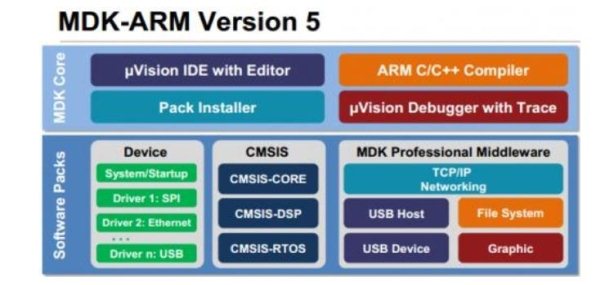
MDK源自德國的KEIL公司,是RealView MDK的簡稱。在全球MDK被超過10萬的嵌入式開發工程師使用。目前最新版本為:MDK5.14,該版本使用uVision5 IDE 集成開發環境,是目前針對ARM處理器,尤其是Cortex M 內核處理器的最佳開發工具。MDK5 向后兼容MDK4和MDK3等,以前的項目同樣可以在MDK5上進行開發(但是頭文件方面得全部自己添加),MDK5同時加強了針對 Cortex-M微控制器開發的支持,并且對傳統的開發模式和界面進行升級,MDK5由兩個部分組成:MDK Core 和 Software Packs。其中,Software Packs 可以獨立于工具鏈進行新芯片支持和中間庫的升級。如圖5.1所示。
圖5.1 MDK架構圖
- 調試過程及現象分析
- 硬件連接
- 硬件連接
圖5.2 系統連接圖
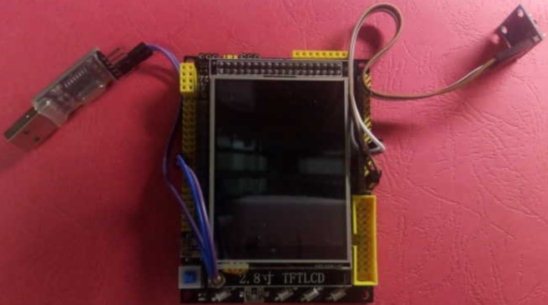
實物連接圖,如圖5.3所示。
5.2.2程序燒錄

燒錄前將核心板與電腦通過仿真器連接起來,把仿真器把仿真器用 USB 線連接電腦,如果仿真器的燈亮則表示正常,可以使用。然后把仿真器的另外一端連接到開發板,給開發板上電,然后就可以通過軟件MDK給開發板下載程序。如圖5.4所示及實物連接圖如5.5所示。
圖5.4 仿真器與電腦和開發板連接方式
 工程軟件配置如圖5.6所示。
工程軟件配置如圖5.6所示。

圖5.6 工程配置圖
- 實驗現象及分析

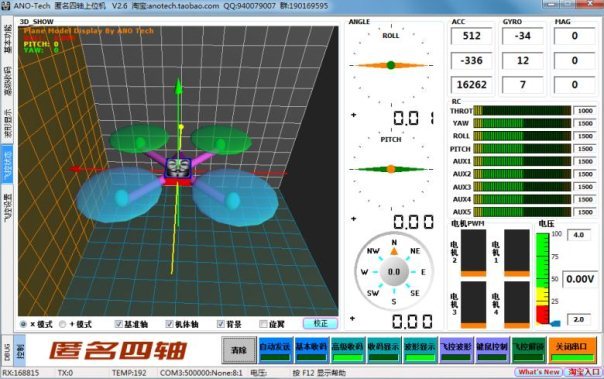
屏幕顯示了MPU6050的溫度、俯仰角(pitch)、橫滾角(roll)和航向角(yaw)的數值。晃動MPU6050傳感器各角度隨之變化。另外,通過按KEY0可以開啟或關閉數據上報,開啟狀態下,打開電腦端上位機,接收STM32F1上傳的數據,從而圖形化顯示傳感器數據。傳感器數據波形顯示如圖5.8所示。
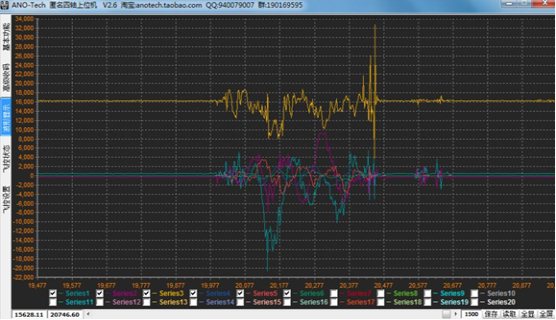
圖5.8 上位機測試圖
課程設計總結
工作展望
- void usart1_send_char(u8 c)
- {
- while((USART1->SR&0X40)==0);//等待上一次發送完畢
- USART1->DR=c;
- }
- //傳送數據給匿名四軸上位機軟件(V2.6版本)
- //fun:功能字. 0XA0~0XAF
- //data:數據緩存區,最多28字節!!
- //len:data區有效數據個數
- void usart1_niming_report(u8 fun,u8*data,u8 len)
- {
- u8 send_buf[32];
- u8 i;
- if(len>28)return; //最多28字節數據
- send_buf[len+3]=0; //校驗數置零
- send_buf[0]=0X88; //幀頭
- send_buf[1]=fun; //功能字
- send_buf[2]=len; //數據長度
- for(i=0;i<len;i++)send_buf[3+i]=data[i]; //復制數據
- for(i=0;i<len+3;i++)send_buf[len+3]+=send_buf[i]; //計算校驗和
- for(i=0;i<len+4;i++)usart1_send_char(send_buf[i]); //發送數據到串口1
- }
- //發送加速度傳感器數據和陀螺儀數據
- //aacx,aacy,aacz:x,y,z三個方向上面的加速度值
- //gyrox,gyroy,gyroz:x,y,z三個方向上面的陀螺儀值
- void mpu6050_send_data(short aacx,short aacy,short aacz,short gyrox,short gyroy,short gyroz)
- {
- u8 tbuf[12];
- tbuf[0]=(aacx>>8)&0XFF;
- tbuf[1]=aacx&0XFF;
- tbuf[2]=(aacy>>8)&0XFF;
- tbuf[3]=aacy&0XFF;
- tbuf[4]=(aacz>>8)&0XFF;
- tbuf[5]=aacz&0XFF;
- tbuf[6]=(gyrox>>8)&0XFF;
- tbuf[7]=gyrox&0XFF;
- tbuf[8]=(gyroy>>8)&0XFF;
- tbuf[9]=gyroy&0XFF;
- tbuf[10]=(gyroz>>8)&0XFF;
- tbuf[11]=gyroz&0XFF;
- usart1_niming_report(0XA1,tbuf,12);//自定義幀,0XA1
- }
- //通過串口1上報結算后的姿態數據給電腦
- //aacx,aacy,aacz:x,y,z三個方向上面的加速度值
- //gyrox,gyroy,gyroz:x,y,z三個方向上面的陀螺儀值
- //roll:橫滾角.單位0.01度。 -18000 -> 18000 對應 -180.00 -> 180.00度
- //pitch:俯仰角.單位 0.01度。-9000 - 9000 對應 -90.00 -> 90.00 度
- //yaw:航向角.單位為0.1度 0 -> 3600 對應 0 -> 360.0度
- void usart1_report_imu(short aacx,short aacy,short aacz,short gyrox,short gyroy,short gyroz,short roll,short pitch,short yaw)
- {
- u8 tbuf[28];
- u8 i;
- for(i=0;i<28;i++)tbuf[i]=0;//清0
- tbuf[0]=(aacx>>8)&0XFF;
- tbuf[1]=aacx&0XFF;
- tbuf[2]=(aacy>>8)&0XFF;
- tbuf[3]=aacy&0XFF;
- tbuf[4]=(aacz>>8)&0XFF;
- tbuf[5]=aacz&0XFF;
- tbuf[6]=(gyrox>>8)&0XFF;
- tbuf[7]=gyrox&0XFF;
- tbuf[8]=(gyroy>>8)&0XFF;
- tbuf[9]=gyroy&0XFF;
- tbuf[10]=(gyroz>>8)&0XFF;
- tbuf[11]=gyroz&0XFF;
- tbuf[18]=(roll>>8)&0XFF;
- tbuf[19]=roll&0XFF;
- tbuf[20]=(pitch>>8)&0XFF;
- tbuf[21]=pitch&0XFF;
- tbuf[22]=(yaw>>8)&0XFF;
- tbuf[23]=yaw&0XFF;
- usart1_niming_report(0XAF,tbuf,28);//飛控顯示幀,0XAF
- }
-
-
- int main(void)
- {
- u8 t=0,report=1; //默認開啟上報
- u8 key;
- float pitch,roll,yaw; //歐拉角
- short aacx,aacy,aacz; //加速度傳感器原始數據
- short gyrox,gyroy,gyroz; //陀螺儀原始數據
- short temp; //溫度
-
- NVIC_PriorityGroupConfig(NVIC_PriorityGroup_2);
- delay_init(); //延時函數初始化
- uart_init(500000); //串口初始化為9600
- usmart_dev.init(72); //初始化USMART
- LED_Init(); //初始化與LED連接的硬件接口
- KEY_Init(); //初始化按鍵
- LCD_Init(); //初始化LCD
- MPU_Init(); //初始化MPU6050
- POINT_COLOR=RED; //設置字體為紅色
- LCD_ShowString(30,50,200,16,16,"Wang Kai");
- LCD_ShowString(30,70,200,16,16,"MPU6050 TEST");
- LCD_ShowString(30,90,200,16,16,"HPU");
- LCD_ShowString(30,110,200,16,16,"2018/3/12");
- while(mpu_dmp_init())
- {
- LCD_ShowString(30,130,200,16,16,"MPU6050 Error");
- delay_ms(200);
- LCD_Fill(30,130,239,130+16,WHITE);
- delay_ms(200);
- }
- LCD_ShowString(30,130,200,16,16,"MPU6050 OK");
- LCD_ShowString(30,150,200,16,16,"KEY0:UPLOAD ON/OFF");
- POINT_COLOR=BLUE;//設置字體為藍色
- LCD_ShowString(30,170,200,16,16,"UPLOAD ON ");
- LCD_ShowString(30,200,200,16,16," Temp: . C");
- LCD_ShowString(30,220,200,16,16,"Pitch: . C");
- LCD_ShowString(30,240,200,16,16," Roll: . C");
- LCD_ShowString(30,260,200,16,16," Yaw : . C");
- LCD_ShowString(30,280,200,16,16," Durriculum Design ");
- while(1)
- {
- key=KEY_Scan(0);
- if(key==KEY0_PRES)
- {
- report=!report;
- if(report)LCD_ShowString(30,170,200,16,16,"UPLOAD ON ");
- else LCD_ShowString(30,170,200,16,16,"UPLOAD OFF");
- }
- if(mpu_dmp_get_data(&pitch,&roll,&yaw)==0)
- {
- temp=MPU_Get_Temperature(); //得到溫度值
- MPU_Get_Accelerometer(&aacx,&aacy,&aacz); //得到加速度傳感器數據
- MPU_Get_Gyroscope(&gyrox,&gyroy,&gyroz); //得到陀螺儀數據
- if(report)mpu6050_send_data(aacx,aacy,aacz,gyrox,gyroy,gyroz);//用自定義幀發送加速度和陀螺儀原始數據
- if(report)usart1_report_imu(aacx,aacy,aacz,gyrox,gyroy,gyroz,(int)(roll*100),(int)(pitch*100),(int)(yaw*10));
- if((t%10)==0)
- {
- if(temp<0)
- {
- LCD_ShowChar(30+48,200,'-',16,0); //顯示負號
- temp=-temp; //轉為正數
- }else LCD_ShowChar(30+48,200,' ',16,0);//去掉負號
- LCD_ShowNum(30+48+8,200,temp/100,3,16);//顯示整數部分
- LCD_ShowNum(30+48+40,200,temp%10,1,16);//顯示小數部分
- temp=pitch*10;
- if(temp<0)
- {
- LCD_ShowChar(30+48,220,'-',16,0); //顯示負號
- temp=-temp; //轉為正數
- }else LCD_ShowChar(30+48,220,' ',16,0);//去掉負號
- LCD_ShowNum(30+48+8,220,temp/10,3,16); //顯示整數部分
- LCD_ShowNum(30+48+40,220,temp%10,1,16);//顯示小數部分
- temp=roll*10;
- if(temp<0)
- {
- LCD_ShowChar(30+48,240,'-',16,0); //顯示負號
- temp=-temp; //轉為正數
- }else LCD_ShowChar(30+48,240,' ',16,0);//去掉負號
- LCD_ShowNum(30+48+8,240,temp/10,3,16); //顯示整數部分
- LCD_ShowNum(30+48+40,240,temp%10,1,16);//顯示數部分
- temp=yaw*10;
- if(temp<0)
- {
- LCD_ShowChar(30+48,260,'-',16,0); //顯示負號
- temp=-temp; //轉為正數
- }else LCD_ShowChar(30+48,260,' ',16,0);//去掉負號
- LCD_ShowNum(30+48+8,260,temp/10,3,16);//顯示整數部分
- LCD_ShowNum(30+48+40,260,temp%10,1,16);//顯示小數部分
- t=0;
- LED0=!LED0;//LED閃爍;
- }
- }
- t++;
- }
- }
完整的Word格式文檔51黑下載地址:
 傾角加速度檢測.doc
(1.3 MB, 下載次數: 35)
傾角加速度檢測.doc
(1.3 MB, 下載次數: 35)
| 歡迎光臨 (http://www.zg4o1577.cn/bbs/) | Powered by Discuz! X3.1 |