
摘 要
鎖相環(huán)電路是使一個(gè)特殊系統(tǒng)跟蹤另外一個(gè)系統(tǒng),更確切的說是一種輸出信號(hào)在頻率和相位上能夠與輸入?yún)⒖夹盘?hào)同步的電路,它是模擬及數(shù)模混合電路中的一個(gè)基本的而且是非常重要的模塊。由于鎖相環(huán)具有捕獲、跟蹤和窄帶濾波的作用,因此被應(yīng)用在通信、微處理器、以及衛(wèi)星等許多領(lǐng)域。鎖相環(huán)是通信電路里時(shí)鐘電路的一個(gè)重要模塊。
本文詳細(xì)介紹了鎖相環(huán)設(shè)計(jì)中所涉及的各項(xiàng)指標(biāo)計(jì)。論文首先對(duì)鎖相環(huán)的發(fā)展歷史和研究現(xiàn)狀做了介紹,然后從其基本工作原理出發(fā),以傳統(tǒng)鎖相環(huán)的結(jié)構(gòu)為基礎(chǔ),得到了鎖相環(huán)的數(shù)學(xué)模型,對(duì)鎖相環(huán)的跟蹤性能、捕獲性能、穩(wěn)定性以及噪聲性能等各種性能進(jìn)行了分析,對(duì)鎖相環(huán)的各項(xiàng)指標(biāo)參數(shù)進(jìn)行了詳細(xì)推導(dǎo),得出了鎖相環(huán)數(shù)學(xué)分析的結(jié)論。本文詳細(xì)描述了鎖相環(huán)的整體電路以及鑒頻鑒相器、環(huán)路濾波器、壓控振蕩器、分頻器等電路模塊。在分析和設(shè)計(jì)的同時(shí),也采用MATLAB軟件對(duì)電路進(jìn)行了仿真。由于MATLAB仿真軟件適合多學(xué)科、多種工作平臺(tái)且功能強(qiáng)大、界面友好、方便快捷、語言自然并且開放性強(qiáng)的大型優(yōu)秀應(yīng)用軟件,已經(jīng)也已成為國內(nèi)外高等院校高等數(shù)學(xué)、數(shù)值分析、數(shù)字信號(hào)處理、自動(dòng)控制理論以及工程應(yīng)用等課程的基本教學(xué)工具。使用Matlab對(duì)鎖相環(huán)仿真的實(shí)現(xiàn)是方便快捷的。仿真結(jié)果表明,鎖相環(huán)電路達(dá)到了設(shè)計(jì)指標(biāo)要求。
前 言
鎖相環(huán)(PLL)是一個(gè)能夠跟蹤輸入信號(hào)相位的閉環(huán)自動(dòng)控制系統(tǒng)。它在無線電技術(shù)的各個(gè)領(lǐng)域得到了很廣泛的應(yīng)用。最初,DeBellescize于1932年提出同步檢波理論,首次公開發(fā)表了對(duì)鎖相環(huán)路的描述,但并未引起普遍關(guān)注。直至1947年,鎖相環(huán)路才第一次應(yīng)用于電視接收機(jī)水平和垂直掃描的同步。從此,鎖相環(huán)路開始得到了應(yīng)用。由于技術(shù)上的復(fù)雜性以及較高的成本,應(yīng)用鎖相環(huán)路的領(lǐng)域主要集中于航天方面,包括軌道衛(wèi)星的測(cè)速定規(guī)和深空探測(cè)等。性能要求較高的精密測(cè)量儀器和通信設(shè)備有時(shí)也用到它。到70年代,隨著集成電路技術(shù)的發(fā)展,逐漸出現(xiàn)了集成的環(huán)路部件、通用單片集成鎖相環(huán)路以及多種專用集成鎖相環(huán)路,鎖相環(huán)逐漸變成了一個(gè)成本低、使用簡單的多功能組件,這就為鎖相技術(shù)在更廣闊的領(lǐng)域應(yīng)用提供了條件。隨著數(shù)字技術(shù)的發(fā)展,相應(yīng)出現(xiàn)了各種數(shù)字鎖相環(huán),它們?cè)跀?shù)字信號(hào)傳輸?shù)妮d波同步、位同步、相干解調(diào)等方面發(fā)揮了重要的作用。
在鎖相環(huán)的開發(fā)、設(shè)計(jì)研究領(lǐng)域,目前已經(jīng)探索出多種途徑。Lindsey和Chie 講述了到1981年他們?cè)谠擃I(lǐng)域出色完成的理論研究和實(shí)驗(yàn)工作。不過,大量的研究都致力于通過不同的方式實(shí)現(xiàn)環(huán)路鑒相器的機(jī)械化,而對(duì)于環(huán)路濾波器的設(shè)計(jì)研究則較少。典型的設(shè)計(jì)方法只是簡單地實(shí)現(xiàn)了在模擬鎖相環(huán)中應(yīng)用廣泛的離散式環(huán)路濾波器。這種方法存在缺陷,因?yàn)樵谠O(shè)計(jì)過程中沒有考慮到在任何采樣數(shù)據(jù)系統(tǒng)中都固有的計(jì)算延遲。這些延遲會(huì)使環(huán)路帶寬比根據(jù)連續(xù)時(shí)間方程計(jì)算出的結(jié)果更寬,指定帶寬和動(dòng)態(tài)下的穩(wěn)態(tài)相位誤差也會(huì)更大,進(jìn)而降低整個(gè)環(huán)路的穩(wěn)定性。
長久以來,鎖相環(huán)一直是相位相干通信系統(tǒng)的基石。模擬鎖相環(huán)一直占據(jù)著統(tǒng)治地位。隨著微電子學(xué)領(lǐng)域的快速發(fā)展,具備巨大優(yōu)勢(shì)的數(shù)字化系統(tǒng)開始取代相應(yīng)的模擬系統(tǒng)。目前的趨勢(shì)是用數(shù)字化方式設(shè)計(jì)和實(shí)現(xiàn)鎖相環(huán)。
第一章 緒 論
1.1 鎖相環(huán)的發(fā)展及國內(nèi)外研究現(xiàn)狀
鎖相環(huán)(PLL-Phase Locked L00P)是自動(dòng)頻率控制和自動(dòng)相位控制技術(shù)的融合。人們對(duì)鎖相環(huán)的最早研究始于20世紀(jì)30年代,其在數(shù)學(xué)理論方面的原理,30年代無線電技術(shù)發(fā)展的初期就己出現(xiàn)。1930年建立了同步控制理論的基礎(chǔ),1932年法國工程師貝爾賽什(Bellescize)發(fā)表了鎖相環(huán)路的數(shù)學(xué)描述和同步檢波論,第一次公開發(fā)表了對(duì)鎖相環(huán)路的數(shù)學(xué)描述【1】。鎖相技術(shù)首先被用在同步接收中,為同步檢波提供一個(gè)與輸入信號(hào)載波同頻的本地參考信號(hào),同步檢波能夠在低信噪比條件下工作,且沒有大信號(hào)檢波時(shí)導(dǎo)致失真的缺點(diǎn),因而受到人們的關(guān)注,但由于電路構(gòu)成復(fù)雜以及成本高等原因,當(dāng)時(shí)沒有獲得廣泛應(yīng)用。
到了1943年鎖相環(huán)路第一次應(yīng)用于黑白電視接收機(jī)水平同步電路中,它可以抑制外部噪聲對(duì)同步信號(hào)的干擾,從而避免了由于噪聲干擾引起的掃描隨機(jī)觸發(fā)使畫面抖動(dòng)的象,使熒光屏上的電視圖像穩(wěn)定清。隨后,在彩色電視接收機(jī)中鎖相電路用來同步彩色脈沖串。從此,鎖相環(huán)路開始得到了應(yīng)用,迅速發(fā)展。
五十年代,隨著空間技術(shù)的發(fā)展,由杰費(fèi)(Jaffe)和里希廷(Rechtin)研制成功利用鎖相環(huán)路作為導(dǎo)彈信標(biāo)的跟蹤濾波器,他們第一次發(fā)表了含有噪聲效應(yīng)的鎖相環(huán)路線性理論析文章,并解決了鎖相環(huán)路最佳設(shè)計(jì)化問題【2】。空間技術(shù)的發(fā)展促進(jìn)了人們對(duì)鎖相環(huán)路及其理論的進(jìn)一步探討,極大地推動(dòng)了鎖相技術(shù)的發(fā)展。
六十年代初,維特比(Viterbi)研究了無噪聲鎖相環(huán)路的非線性理論問題, 發(fā)表了相干通信原理的論文。最初的鎖相環(huán)都是利用分立元件搭建的,由于技術(shù)和成本方面的原因,所以當(dāng)時(shí)只是用于航天、航空等軍事和精密測(cè)量等領(lǐng)域。集成電路技術(shù)出現(xiàn)后,直到1965年左右,隨著半導(dǎo)體技術(shù)的發(fā)展,第一塊鎖相環(huán)芯片出現(xiàn)之后【3】,鎖相環(huán)才作為一個(gè)低成本的多功能組件開始大量應(yīng)用各種領(lǐng)域。最初的鎖相環(huán)是純模擬的(APLL),所有的模塊都由模擬電路組成,它大多由四象限模擬乘法器來構(gòu)建環(huán)路中的鑒相器,環(huán)路濾波器為低通濾波器(由電阻R電容C組成),壓控振蕩器的結(jié)構(gòu)多種多樣。由于APLL在穩(wěn)定工作時(shí),各模塊都可以認(rèn)為是線性工作的,所以也稱為線性鎖相環(huán)LPLL(Linear Phase.hckedbop)。APLL對(duì)正弦特性信號(hào)的相位跟蹤非常好,它的環(huán)路特性主要由鑒相器的特性決定。其主要用于對(duì)信號(hào)的調(diào)制。
70年代,林特賽(Undsy)和查理斯(Chanes)在做了大量實(shí)驗(yàn)的基礎(chǔ)上進(jìn)行了有噪聲的一階、二階及高階PLL的非線性理論分析。隨著人們對(duì)鎖相技術(shù)的理論和應(yīng)用進(jìn)行的深入廣泛的研究,伴隨著數(shù)字電路的發(fā)展,鑒相器部分開始由數(shù)字電路代替,其它部分仍為模擬電路,這種鎖相環(huán)就是最初的數(shù)字鎖相環(huán)(DPLL),準(zhǔn)確的名稱為數(shù)模混合鎖相環(huán)(Mixed-single PLL)。隨著數(shù)模混合鎖相環(huán)技術(shù)和理的不斷發(fā)展和完善,其成為了鎖相環(huán)的主流。
現(xiàn)在隨著通信行中對(duì)低成本、低功耗、大帶寬、高數(shù)據(jù)傳輸速率的需求, 集成電路不斷朝著高集成度、低功耗的方向發(fā)展【4】。低功耗、高工作頻率、低電壓的鎖相環(huán)設(shè)計(jì)中,主要的挑戰(zhàn)是設(shè)計(jì)合適的壓控振蕩器和高頻率的分頻器,針對(duì)這方面的研究,設(shè)計(jì)師們不斷提出不同的技術(shù),如壓控振蕩器和分頻器由原來的串接改為堆疊結(jié)構(gòu)、DH-PLL結(jié)構(gòu)等,隨著設(shè)計(jì)人員的不斷努力,鎖相壞的性能不斷提高,現(xiàn)在已經(jīng)有工作頻率達(dá)50GHz的鎖相環(huán),同時(shí)也在通信和航空航天等領(lǐng)域中發(fā)揮著越來越重要的作要。
國外自第一個(gè)鎖相環(huán)集成產(chǎn)品問世以來,幾十年問發(fā)展極為迅速,產(chǎn)品種類繁多,工藝日新月異。目前,除某些特殊用途的鎖相環(huán)路外,幾乎全部集成了,已生產(chǎn)出數(shù)百個(gè)品種。現(xiàn)在,鎖相技術(shù)己經(jīng)成為一門系統(tǒng)的理論科學(xué),它在通信、雷達(dá)、航天、精密測(cè)量、計(jì)算機(jī)、紅外、激光、原子能、立體聲、馬達(dá)控制以及圖像等技術(shù)部門獲得了廣泛的應(yīng)用。
美國國家半導(dǎo)體(Nation Semi Conductor)于2003年6月宣布推出的LMx243x系列鎖相環(huán)芯片,其操作頻率高達(dá)3GHz以上,適用于無線局域網(wǎng)、5.8GHz室內(nèi)無繩電話、移動(dòng)電話及基站等應(yīng)用方案。低功耗、超低的相位噪聲(正常化相位噪音可達(dá)到—219dBcmz)使其突顯優(yōu)勢(shì)。
國內(nèi)的浩凱微電子(上海)有限公司于2007年底研發(fā)出具有完全自主知識(shí)產(chǎn)權(quán)的高性能時(shí)鐘鎖相環(huán)IP系列產(chǎn)品,目前該系列產(chǎn)品已經(jīng)過MPW硅驗(yàn)證。該鎖相環(huán)系列采用全新的結(jié)構(gòu),獨(dú)特的電荷泵和差分VCO的設(shè)計(jì),可以抑制電源和襯底噪聲對(duì)VCO的影響以確保PLL有非常低的噪聲,差分VCO的獨(dú)特設(shè)計(jì)可以輸出時(shí)鐘維持50%占空比且與VCO同頻,由于不需要倍頻振蕩,VCO本身的功耗可降為常規(guī)設(shè)計(jì)的四分之一,有效降低了功耗。相比國外而言,我國國內(nèi)的IC設(shè)計(jì)水平相對(duì)比較落后,模擬設(shè)計(jì)環(huán)節(jié)更是薄弱,PLL的技術(shù)幾乎被國外壟斷,國內(nèi)很少有企業(yè)掌握高性能PLL核心技術(shù), 產(chǎn)品更是少。CPPLL作為應(yīng)用最廣泛的一種鎖相環(huán),雖然它的理論己經(jīng)比較成熟,但是它的設(shè)計(jì)與實(shí)現(xiàn)涉及到信號(hào)與系統(tǒng)、集成電子學(xué)、版圖、半導(dǎo)體工藝和測(cè)試等方面,難度比較大。
1.2 本文的主要內(nèi)容組織
第一章對(duì)鎖相環(huán)的發(fā)展和國內(nèi)外研究現(xiàn)狀進(jìn)行了介紹,說明了本課題研究的
重要意義。
第二章介紹了鎖相環(huán)的基本原理,介紹了鎖相環(huán)的基本構(gòu)成、數(shù)學(xué)模型、工作狀態(tài)及、信號(hào)流程應(yīng)用及信號(hào)流程。
第三章分析了了鎖相環(huán)噪聲的產(chǎn)生原因,并在數(shù)學(xué)模型上作了說明,并給出了設(shè)計(jì)建議。
第四章是二階環(huán)仿真源程序代碼及仿真結(jié)果。
第二章 鎖相環(huán)的基本理論
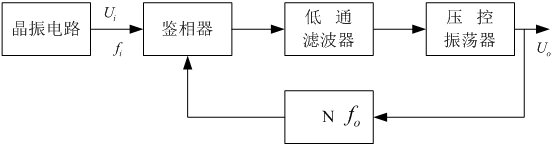
鎖相環(huán)作為一個(gè)系統(tǒng),主要包含三個(gè)基本模塊:鑒相器(Phase Detector:PD)、低通濾波器(LowPass Filter:LPF),亦即環(huán)路濾波器(L00P Filter:LF),和壓控振蕩器(Voltage Controlled Oscillator:VCO)。這三個(gè)基本模塊組成的鎖相環(huán)為基本鎖相環(huán),亦即線形鎖相環(huán)(LPLL),如圖2.1所示。
圖2.1鎖相環(huán)原理圖
當(dāng)鎖相環(huán)開始工作時(shí),輸入?yún)⒖夹盘?hào)的頻率![]() 與壓控振蕩器的固有振蕩頻率
與壓控振蕩器的固有振蕩頻率![]() 總是不相同的,即
總是不相同的,即![]() ,這一固有頻率差
,這一固有頻率差![]() 必然引起它們之間的相位差不斷變化,并不斷跨越
必然引起它們之間的相位差不斷變化,并不斷跨越![]() 角。由于鑒相器特性是以相位差
角。由于鑒相器特性是以相位差![]() 為周期的,因此鑒相器輸出的誤差電壓總是在某一范圍內(nèi)擺動(dòng)。這個(gè)誤差電壓通過環(huán)路濾波器變成控制電壓加到壓控振蕩器上,使壓控振蕩器的頻率
為周期的,因此鑒相器輸出的誤差電壓總是在某一范圍內(nèi)擺動(dòng)。這個(gè)誤差電壓通過環(huán)路濾波器變成控制電壓加到壓控振蕩器上,使壓控振蕩器的頻率![]() 趨向于參考信號(hào)的頻率
趨向于參考信號(hào)的頻率![]() ,直到壓控振蕩器的頻率變化到與輸入?yún)⒖夹盘?hào)的頻率相等,并滿足一定條件,環(huán)路就在這個(gè)頻率上穩(wěn)定下來。兩個(gè)頻率之間的相位差不隨時(shí)間變化而是一個(gè)恒定的常數(shù),這時(shí)環(huán)路就進(jìn)入“鎖定”狀態(tài)。
,直到壓控振蕩器的頻率變化到與輸入?yún)⒖夹盘?hào)的頻率相等,并滿足一定條件,環(huán)路就在這個(gè)頻率上穩(wěn)定下來。兩個(gè)頻率之間的相位差不隨時(shí)間變化而是一個(gè)恒定的常數(shù),這時(shí)環(huán)路就進(jìn)入“鎖定”狀態(tài)。
當(dāng)環(huán)路已處于鎖定狀態(tài)時(shí),如果輸入?yún)⒖夹盘?hào)的頻率和相位發(fā)生變化,通過環(huán)路的控制作用,壓控振蕩器的頻率和相位能不斷跟蹤輸入?yún)⒖夹盘?hào)頻率的變化而變化,使環(huán)路重新進(jìn)入鎖定狀態(tài),這種動(dòng)態(tài)過程稱為環(huán)路的“跟蹤”過程。而環(huán)路不處于鎖定和跟蹤狀態(tài),這個(gè)動(dòng)態(tài)過程稱為“失鎖”過程。
從上述分析可知,鑒相器有兩個(gè)主要功能:一個(gè)是頻率牽引,另一個(gè)是相位鎖定。實(shí)際中使用的鎖相環(huán)系統(tǒng)還包括放大器、分頻器、混頻器等模塊,但是這些附加的模塊不會(huì)影響鎖相環(huán)的基本工作原理,可以忽略。
2.1 鎖相環(huán)的工作原理
鎖相環(huán)作為一個(gè)系統(tǒng),主要包含三個(gè)基本模塊:鑒相器【4】、低通濾波器,亦即環(huán)路濾波器,和壓控振蕩器。在本節(jié)首先分析鑒相器、環(huán)路濾波器和壓控振蕩器.
鎖相環(huán)中的鑒相器(PD)通常由模擬乘法器組成,利用模擬乘法器組成的鑒相器電路如圖示:

圖2.2 模擬鑒相器電路
鑒相器的工作原理是:設(shè)外界輸入的信號(hào)電壓和壓控振蕩器輸出的信號(hào)電壓分別為:
![]() (2.1)
(2.1)
![]() (2.2)
(2.2)
式中的![]() 為壓控振蕩器在輸入控制電壓為零或?yàn)橹绷麟妷簳r(shí)的振蕩角頻率,稱為電路的固有振蕩角頻率。則模擬乘法器的輸出電壓
為壓控振蕩器在輸入控制電壓為零或?yàn)橹绷麟妷簳r(shí)的振蕩角頻率,稱為電路的固有振蕩角頻率。則模擬乘法器的輸出電壓![]() 為:
為:

(2.3)
鑒相器的傳輸特性為:

圖2.3 鑒相器的傳輸特性
鑒相器有兩個(gè)主要功能:一個(gè)是頻率牽引,另一個(gè)是相位鎖定。實(shí)際中使用的鎖相環(huán)系統(tǒng)還包括放大器、分頻器、混頻器等模塊,但是這些附的模塊不會(huì)影響鎖相環(huán)的基本工作原理,可以忽略。
鑒相器的電路種類很多,大致可以分為四種常用類型:
1.乘法鑒相器。一般應(yīng)用在模擬鎖相環(huán)(LPLL)中,即線性鎖相環(huán),鑒相的范圍是[+90°,-90°];
2.異或門鑒相器。較多應(yīng)用于數(shù)字鎖相環(huán)中,鑒相范圍同為[+90°,-90°]中,要考慮鑒相器輸入的兩個(gè)信號(hào)是對(duì)稱的還是非對(duì)稱的,如是非對(duì)稱還要考慮其對(duì)PLL增益及鎖相寬度的影響;
3.JK觸發(fā)器型鑒相器。這種鑒相器由邊沿觸發(fā),利用邊沿間的間隔進(jìn)行鑒相,相位誤差為[+180°,-l80°];
4.鑒頻鑒相器(phase—frequency detector)。其優(yōu)勢(shì)就在于失鎖時(shí),它的角頻率容易描述。這種角頻率的描述就可以實(shí)現(xiàn)鑒頻的功能。鑒相范圍為[+360°,-360°]。
2.1.2低通濾波器
低通濾波器(LF)的將上式2.3中的和頻分量濾掉,剩下的差頻分量作為壓控振蕩器的輸入控制電壓![]() 。即為:
。即為:
 (2.4)
(2.4)
式中的![]() 為輸入信號(hào)的瞬時(shí)振蕩角頻率,
為輸入信號(hào)的瞬時(shí)振蕩角頻率,![]() 和
和![]() 分別為輸入信號(hào)和輸出信號(hào)的瞬時(shí)位相,根據(jù)相量的關(guān)系可得瞬時(shí)頻率和瞬時(shí)位相的關(guān)系為:
分別為輸入信號(hào)和輸出信號(hào)的瞬時(shí)位相,根據(jù)相量的關(guān)系可得瞬時(shí)頻率和瞬時(shí)位相的關(guān)系為:
![]()
即
![]() (2.5) 則,瞬時(shí)相位差
(2.5) 則,瞬時(shí)相位差![]() 為
為
![]() (2.6)
(2.6)
對(duì)兩邊求微分,可得頻差的關(guān)系式為:
![]() (2.7)
(2.7)
上式2.7等于零,說明鎖相環(huán)進(jìn)入相位鎖定的狀態(tài),此時(shí)輸出和輸入信號(hào)的頻率和相位保持恒定不變的狀態(tài),![]() 為恒定值。當(dāng)上式不等于零時(shí),說明鎖相環(huán)的相位還未鎖定,輸入信號(hào)和輸出信號(hào)的頻率不等,
為恒定值。當(dāng)上式不等于零時(shí),說明鎖相環(huán)的相位還未鎖定,輸入信號(hào)和輸出信號(hào)的頻率不等,![]() 隨時(shí)間而變。其數(shù)學(xué)模型為:
隨時(shí)間而變。其數(shù)學(xué)模型為:

圖2.4 環(huán)路濾波器模型
環(huán)路濾波器的分類:
1.RC積分濾波器。這是結(jié)構(gòu)最簡單的低通濾波器,它具有低通特性,且相位滯后。當(dāng)頻率很高的時(shí)候,幅度趨于零,相位滯后接近于![]() ;
;
2.無源比例積分濾波器;
3.有源比例積分濾波器。它由運(yùn)算放大器組成,高增益的有源比例積分濾波器又稱為理想積分濾波器。
2.1.3壓控振蕩器
壓控振蕩器(VCO)【6】的壓控特性如圖2.5所示:

2.5壓控振蕩器特性
該特性說明壓控振蕩器的振蕩頻率![]() 以為中心,隨輸入信號(hào)電壓
以為中心,隨輸入信號(hào)電壓![]() 線性地變化,變化的關(guān)系如下:
線性地變化,變化的關(guān)系如下:
![]() (2.8)
(2.8)
上式說明當(dāng)![]() 隨時(shí)間而變時(shí),壓控振蕩器(VCO)的振蕩頻率
隨時(shí)間而變時(shí),壓控振蕩器(VCO)的振蕩頻率![]() 也隨時(shí)間而變,鎖相環(huán)進(jìn)入“頻率牽引”,自動(dòng)跟蹤捕捉輸入信號(hào)的頻率,使鎖相環(huán)進(jìn)入鎖定的狀態(tài),并保持
也隨時(shí)間而變,鎖相環(huán)進(jìn)入“頻率牽引”,自動(dòng)跟蹤捕捉輸入信號(hào)的頻率,使鎖相環(huán)進(jìn)入鎖定的狀態(tài),并保持![]() 的狀態(tài)不變。
的狀態(tài)不變。
2.2鎖相環(huán)的工作狀態(tài)
鎖相環(huán)有四種工作狀態(tài),即鎖定狀態(tài)、失鎖狀態(tài)、捕獲過程和跟蹤過程【7】。
1.鎖定狀態(tài):整個(gè)環(huán)路己經(jīng)達(dá)到輸入信號(hào)相位的穩(wěn)定狀態(tài)。它指輸出信號(hào)相位等于輸入信號(hào)相位或者是兩者存在一個(gè)固定的相位差,但頻率相等。在鎖定狀態(tài)時(shí),壓控振蕩器的電壓控制信號(hào)接近平緩。
2.失鎖狀態(tài):環(huán)路的反饋信號(hào)與鎖相環(huán)輸入信號(hào)的頻率之差不能為零的穩(wěn)狀態(tài)。當(dāng)環(huán)路的結(jié)構(gòu)設(shè)計(jì)有問題,或者是輸入信號(hào)超出了鎖相環(huán)的應(yīng)用范圍的時(shí)候都會(huì)進(jìn)入失鎖狀態(tài)。這個(gè)狀態(tài)意味著壞路沒有正常工作。
3.捕獲過程:指環(huán)路由失鎖狀態(tài)進(jìn)入鎖定狀態(tài)的過程。這個(gè)狀態(tài)表明環(huán)路已經(jīng)開始進(jìn)入正常工作,但是還沒有達(dá)到鎖定的穩(wěn)態(tài)。此過程應(yīng)該是一個(gè)頻率和相位誤差不斷減小的過程。
4.跟蹤過程:是指在PLL環(huán)路處于鎖定狀態(tài)時(shí),若此時(shí)輸入信號(hào)頻率或相位因其它原因發(fā)生變化,環(huán)路能通過自動(dòng)調(diào)節(jié),來維持鎖定狀態(tài)的過程。由于輸入信號(hào)頻率或者相位的變化引起的相位誤差一般都不大,環(huán)路可視作線性系統(tǒng)。PLL的這四種狀態(tài)中,前兩個(gè)狀態(tài)稱為靜態(tài),后兩個(gè)狀態(tài)稱為動(dòng)態(tài)【8】。優(yōu)秀的設(shè)計(jì)可以使PLL在上電后立刻進(jìn)入捕獲狀態(tài),從而快速鎖定。
一般用四個(gè)參數(shù)指標(biāo)來描述PLL的系統(tǒng)頻帶性能:
1.同步帶:它指的是環(huán)路能保持靜態(tài)鎖定狀態(tài)的頻率范圍。當(dāng)環(huán)路鎖定時(shí),逐步增大輸入頻率,環(huán)路最終都能保持鎖定的最大輸入固有頻差。
2.失鎖帶:鎖相環(huán)路穩(wěn)定工作時(shí)的動(dòng)態(tài)極限。也就是說PLL在穩(wěn)定工作狀態(tài)時(shí),輸入信號(hào)的跳變要小于這個(gè)參數(shù),PLL才能快速鎖定。若輸入信號(hào)的跳變大于該參數(shù)而小于捕獲帶,則環(huán)路還是能鎖定,但是需要較長的時(shí)間。
3.捕獲帶:只要反饋信號(hào)和輸入信號(hào)的頻差在這一范圍內(nèi),環(huán)路總會(huì)通過捕獲而再次鎖定,隨著捕獲過程的進(jìn)行,反饋信號(hào)的頻率向著輸入信號(hào)頻率方向靠近,經(jīng)過一段時(shí)間后,環(huán)路進(jìn)入快捕帶過程,最終達(dá)到鎖定。
4.快捕帶:在此頻差范圍內(nèi),環(huán)路不需要經(jīng)歷周期跳躍就可達(dá)到鎖定,實(shí)現(xiàn)捕獲過程。
 2.6鎖相環(huán)不同帶寬捕獲示意圖【5】
2.6鎖相環(huán)不同帶寬捕獲示意圖【5】
當(dāng)相關(guān)頻率變化比較小時(shí),相位誤差e大小將與頻率的變換量![]() 成比例。而如果頻率偏移
成比例。而如果頻率偏移![]() 達(dá)到某一特定值時(shí),稍有變換PLL將失去捕獲相位的能力,最終失鎖。這一特定值就稱作PLL的同步帶。這個(gè)頻率范圍也稱作PLL穩(wěn)定的靜態(tài)極限范圍。在失鎖時(shí),相位誤差
達(dá)到某一特定值時(shí),稍有變換PLL將失去捕獲相位的能力,最終失鎖。這一特定值就稱作PLL的同步帶。這個(gè)頻率范圍也稱作PLL穩(wěn)定的靜態(tài)極限范圍。在失鎖時(shí),相位誤差![]() 將無限增加下去,同步帶內(nèi),信號(hào)的捕獲時(shí)間也是最長的。捕獲的穩(wěn)定性也較差。
將無限增加下去,同步帶內(nèi),信號(hào)的捕獲時(shí)間也是最長的。捕獲的穩(wěn)定性也較差。
頻率階躍信號(hào)作為輸入信號(hào)進(jìn)入PLL時(shí)(![]() 時(shí)刻頻率階躍的大小是
時(shí)刻頻率階躍的大小是![]() ),如果此階躍信號(hào)引起PLL的失鎖,那么就稱這個(gè)頻率階躍值為鎖出頻率值,這個(gè)范圍叫做鎖相環(huán)出鎖頻率。這個(gè)階躍信號(hào)頻差值小于PLL的同步帶。在這里,同步帶可以看作是頻率緩慢變化到此范圍使鎖相環(huán)失鎖的極值;而出鎖頻率是突然變化到此階躍值而引起PLL失鎖。而且出鎖范圍也可以理解為PLL穩(wěn)定的動(dòng)態(tài)范圍,在頻率階躍信號(hào)的跳變不超過出鎖范圍時(shí)PLL是滿足穩(wěn)定條件的。
),如果此階躍信號(hào)引起PLL的失鎖,那么就稱這個(gè)頻率階躍值為鎖出頻率值,這個(gè)范圍叫做鎖相環(huán)出鎖頻率。這個(gè)階躍信號(hào)頻差值小于PLL的同步帶。在這里,同步帶可以看作是頻率緩慢變化到此范圍使鎖相環(huán)失鎖的極值;而出鎖頻率是突然變化到此階躍值而引起PLL失鎖。而且出鎖范圍也可以理解為PLL穩(wěn)定的動(dòng)態(tài)范圍,在頻率階躍信號(hào)的跳變不超過出鎖范圍時(shí)PLL是滿足穩(wěn)定條件的。
如果有一頻差值使得平均相位誤差的斜率變小,且VCO輸出的頻率值會(huì)越來越接近輸入信號(hào)的頻率,最終環(huán)路系統(tǒng)將重新鎖定,這一關(guān)鍵值稱作入鎖頻率。
假如輸入信號(hào)頻率與輸出信號(hào)頻率的偏移量![]() 低于捕獲帶,則PLL將要鎖定。這個(gè)過程稱作快捕過程,它快于入鎖過程,而這個(gè)捕獲范圍也小于入鎖范圍。
低于捕獲帶,則PLL將要鎖定。這個(gè)過程稱作快捕過程,它快于入鎖過程,而這個(gè)捕獲范圍也小于入鎖范圍。
PLL捕獲的過程包含頻率捕獲與相位捕獲兩個(gè)過程,通常頻率捕獲過程所需要的時(shí)間稱為頻率捕獲時(shí)間(或頻率牽引時(shí)間);相位捕獲過程所需要的時(shí)間稱為快捕時(shí)間(或相位捕獲時(shí)間)。一般頻率捕獲時(shí)間總是大于相位捕獲時(shí)間的,所以常說的捕獲時(shí)間就是指頻率捕獲時(shí)間,不考慮相位捕獲時(shí)間的影響。
2.3鎖相環(huán)的非線性工作性能分析
當(dāng)鎖相環(huán)的相位誤差大于![]() 時(shí),正弦鑒相器將不再能夠線性化,環(huán)路成為非線性系統(tǒng),其非線性性能表現(xiàn)為以下三種情況:已處于鎖定狀態(tài)的鎖相環(huán),當(dāng)輸入信號(hào)頻率或壓控振蕩器自由振蕩頻率變化過大或變化速度過快時(shí),使環(huán)路相位誤差增大到鑒相器的非線性區(qū),這種非線性環(huán)路的性能為非線性跟蹤性能【9】;從接通到鎖定的捕獲過程中,相位誤差的變化范圍是很大的,環(huán)路處于非線性狀
時(shí),正弦鑒相器將不再能夠線性化,環(huán)路成為非線性系統(tǒng),其非線性性能表現(xiàn)為以下三種情況:已處于鎖定狀態(tài)的鎖相環(huán),當(dāng)輸入信號(hào)頻率或壓控振蕩器自由振蕩頻率變化過大或變化速度過快時(shí),使環(huán)路相位誤差增大到鑒相器的非線性區(qū),這種非線性環(huán)路的性能為非線性跟蹤性能【9】;從接通到鎖定的捕獲過程中,相位誤差的變化范圍是很大的,環(huán)路處于非線性狀
態(tài);失鎖狀態(tài)時(shí)環(huán)路的頻率牽引現(xiàn)象。
2.3.1跟蹤性能
環(huán)路非線性跟蹤性能指標(biāo)包括穩(wěn)態(tài)相位誤差見![]() 、同步帶
、同步帶![]() 和最大同步掃描速
和最大同步掃描速![]() ,在這里從環(huán)路動(dòng)態(tài)方程對(duì)其進(jìn)行分析。輸入固定頻率信號(hào)的條件下,鎖相環(huán)路的動(dòng)態(tài)方程可變?yōu)椋?/font>
,在這里從環(huán)路動(dòng)態(tài)方程對(duì)其進(jìn)行分析。輸入固定頻率信號(hào)的條件下,鎖相環(huán)路的動(dòng)態(tài)方程可變?yōu)椋?/font>
![]() (2.9)
(2.9)
環(huán)路鎖定時(shí)瞬時(shí)相差![]() 等于零,且鑒相器輸出誤差信號(hào)和壓控振蕩器控制信號(hào)均為直流,由此可得環(huán)路的穩(wěn)態(tài)相位誤差為:
等于零,且鑒相器輸出誤差信號(hào)和壓控振蕩器控制信號(hào)均為直流,由此可得環(huán)路的穩(wěn)態(tài)相位誤差為:
![]() (2.10)
(2.10)
上式2.10中![]() 為環(huán)路濾波器的直流增益。理想二階環(huán)的
為環(huán)路濾波器的直流增益。理想二階環(huán)的![]() ,其穩(wěn)態(tài)相位誤差為:
,其穩(wěn)態(tài)相位誤差為:![]() 對(duì)于已經(jīng)鎖定的環(huán)路,緩慢增加其固有頻率,環(huán)路如果還能保持鎖定,則
對(duì)于已經(jīng)鎖定的環(huán)路,緩慢增加其固有頻率,環(huán)路如果還能保持鎖定,則![]() 有解。使上式有解的環(huán)路固有頻差的最大值就是環(huán)路的同步帶,即:
有解。使上式有解的環(huán)路固有頻差的最大值就是環(huán)路的同步帶,即:
![]() (2.11)
(2.11)
則可得理想二階環(huán)路的同步帶:
![]() (2.12)
(2.12)
上式2.12成立的前提是環(huán)路濾波器和壓控振蕩器都有無限大的線性工作范圍,這是不符合實(shí)際的。理想二階環(huán)的同步帶是有限的,它往往受限于壓控振蕩器的最大控制范圍。理想二階環(huán)可以跟蹤頻率斜升信號(hào),其穩(wěn)態(tài)相位誤差為![]() 。加大頻率斜升信號(hào)的斜率R,就可能使環(huán)路進(jìn)入非線性跟蹤狀態(tài)。進(jìn)一步加大R,環(huán)路就可能失鎖。使環(huán)路不致失鎖的尺的最大值就是最大同步掃描速率。在輸入頻率斜升信號(hào)的條件下有:
。加大頻率斜升信號(hào)的斜率R,就可能使環(huán)路進(jìn)入非線性跟蹤狀態(tài)。進(jìn)一步加大R,環(huán)路就可能失鎖。使環(huán)路不致失鎖的尺的最大值就是最大同步掃描速率。在輸入頻率斜升信號(hào)的條件下有:
![]() (2.13)
(2.13)
把理想二階壞的傳輸算子![]() 代入上式2.13可得鎖定時(shí)壞路的相位誤差為:
代入上式2.13可得鎖定時(shí)壞路的相位誤差為:
![]() (2.14)
(2.14)
當(dāng)![]() 上式無解,意味著環(huán)路失鎖,因此理想二階環(huán)的最大同步掃描速率為:
上式無解,意味著環(huán)路失鎖,因此理想二階環(huán)的最大同步掃描速率為:
![]() (2.15)
(2.15)
2.3.2捕獲性能
實(shí)際工作過程中,鎖相環(huán)初始狀態(tài)往往是失鎖狀態(tài)。環(huán)路經(jīng)由失鎖進(jìn)入鎖定狀態(tài),需要經(jīng)歷一個(gè)捕獲過程。捕獲過程分為頻率捕獲和相位捕獲兩個(gè)過程。在相位捕獲中環(huán)路相位誤差不會(huì)發(fā)生![]() 周期跳躍,捕獲時(shí)間比較短,因此相位捕獲也叫做快捕。與相位捕獲相比,頻率捕獲時(shí)間較長,它構(gòu)成了捕獲時(shí)間的主要部分。一般而言,捕獲過程中環(huán)的瞬時(shí)相差將在大范圍內(nèi)變化,使捕獲過程表現(xiàn)為一種非線性現(xiàn)象。要想獲得環(huán)路捕獲性能的全部結(jié)果,需要求解環(huán)路非線性動(dòng)態(tài)方程,二階環(huán)路的動(dòng)態(tài)方程是二階非線性微分方程,在數(shù)學(xué)上是無法精確求解的,只能用近似求解的方法求解。理想二階環(huán)的方程為:
周期跳躍,捕獲時(shí)間比較短,因此相位捕獲也叫做快捕。與相位捕獲相比,頻率捕獲時(shí)間較長,它構(gòu)成了捕獲時(shí)間的主要部分。一般而言,捕獲過程中環(huán)的瞬時(shí)相差將在大范圍內(nèi)變化,使捕獲過程表現(xiàn)為一種非線性現(xiàn)象。要想獲得環(huán)路捕獲性能的全部結(jié)果,需要求解環(huán)路非線性動(dòng)態(tài)方程,二階環(huán)路的動(dòng)態(tài)方程是二階非線性微分方程,在數(shù)學(xué)上是無法精確求解的,只能用近似求解的方法求解。理想二階環(huán)的方程為:
![]() (2.16)
(2.16)
設(shè)環(huán)路輸入信號(hào)頻率固定,則
![]()
![]() (2.17)
(2.17)
代入并簡化,可得理想二階環(huán)軌跡方程:
 (2.18)
(2.18)
由上式可得到理想二階環(huán)的捕獲特性,如下表
2.6理想二階環(huán)的捕獲特性
捕獲帶 | 快補(bǔ)帶 | 捕獲時(shí)間 | 快補(bǔ)時(shí)間 | 最大捕獲掃描率 |
|
|
|
|
|
實(shí)際情況中環(huán)路的捕獲帶不會(huì)為無窮大【10】,它受到壓控振蕩器最大頻率范圍的限制。
2.3.3失鎖狀態(tài)
鎖相環(huán)失鎖時(shí),具有頻率牽引現(xiàn)象。當(dāng)環(huán)路失鎖時(shí),環(huán)路中誤差電壓為上下不對(duì)稱的周期性差拍信號(hào),此差拍電壓的直流分量使壓控振蕩器的平均頻率向輸入信號(hào)頻率靠近,從而使環(huán)路輸出信號(hào)的平均頻差小于環(huán)路固有頻差。
2.4鎖相環(huán)的穩(wěn)定性
鎖相環(huán)是一個(gè)負(fù)反饋系統(tǒng),要工作正常,首先必須穩(wěn)定,不穩(wěn)定就不能實(shí)現(xiàn)相位的自動(dòng)調(diào)節(jié)。通常的系統(tǒng)穩(wěn)定性,是指系統(tǒng)在有限輸入的作用下輸出有限響應(yīng)。
對(duì)于線形系統(tǒng)而言,其穩(wěn)定性與輸入信號(hào)的大小無關(guān),只取決于系統(tǒng)傳遞函數(shù)極點(diǎn)的位置。線形系統(tǒng)穩(wěn)定的必要和充分條件,是系統(tǒng)閉環(huán)傳遞函數(shù)的所有點(diǎn)都具有負(fù)實(shí)部,或者說都位于s平面的左半部。
鎖相環(huán)路本質(zhì)是一個(gè)非線性系統(tǒng),它的穩(wěn)定性是一個(gè)非線性問題。非線性系統(tǒng)的穩(wěn)定性取決于系統(tǒng)本身和輸入。因此,通常把非線性系統(tǒng)的穩(wěn)定性分為強(qiáng)干擾作用下和弱干擾作用下的穩(wěn)定性問題,或者叫大穩(wěn)定性和小穩(wěn)定性問題。對(duì)于鎖相環(huán)來說,前者相當(dāng)于環(huán)路失鎖而處于捕獲狀態(tài),后者相當(dāng)于同步狀態(tài)。對(duì)于大穩(wěn)定性問題,主要研究環(huán)路的捕捉問題。同步狀態(tài)是環(huán)路的線形工作狀態(tài),所以小穩(wěn)定性問題實(shí)際上是一個(gè)線形系統(tǒng)的穩(wěn)定性問題。
判斷系統(tǒng)穩(wěn)定性的方法,通常叫巴克豪森準(zhǔn)則【11】。對(duì)于一個(gè)反饋系統(tǒng),如果其環(huán)路增益超過1,同時(shí)環(huán)路相移超過![]() ,即同時(shí)滿足起振的振幅條件和位條件,那么此反饋系統(tǒng)是不穩(wěn)定的,巴克豪森準(zhǔn)則判斷系統(tǒng)穩(wěn)定性的條件是:
,即同時(shí)滿足起振的振幅條件和位條件,那么此反饋系統(tǒng)是不穩(wěn)定的,巴克豪森準(zhǔn)則判斷系統(tǒng)穩(wěn)定性的條件是:

或
 (2.19)
(2.19)
公式2.19中![]() 是增益臨界頻率,為開環(huán)增益達(dá)到0dB時(shí)的頻率。
是增益臨界頻率,為開環(huán)增益達(dá)到0dB時(shí)的頻率。![]() 相位臨界頻率,為開環(huán)相移達(dá)到萬時(shí)的頻率。
相位臨界頻率,為開環(huán)相移達(dá)到萬時(shí)的頻率。
對(duì)于閉環(huán)不穩(wěn)定的環(huán)路必有對(duì)于閉環(huán)穩(wěn)定的環(huán)路,必有ωT>ωK;閉環(huán)臨界的情況為![]() 。在工程中,閉環(huán)臨界的穩(wěn)定情況實(shí)際是不穩(wěn)定的,因?yàn)閷?shí)際電路中總有引起各種參數(shù)變化的因素,產(chǎn)生附加相移,這些都會(huì)使一個(gè)臨界穩(wěn)定的壞路不穩(wěn)定。所以,實(shí)際使用的環(huán)路不但是穩(wěn)定的而且要遠(yuǎn)離臨界條件。這就是“相位裕度”的問題,定義為丌環(huán)增益降至OdB時(shí)開環(huán)相移量與π的差值,此概念可以說明環(huán)路穩(wěn)定的程度。
。在工程中,閉環(huán)臨界的穩(wěn)定情況實(shí)際是不穩(wěn)定的,因?yàn)閷?shí)際電路中總有引起各種參數(shù)變化的因素,產(chǎn)生附加相移,這些都會(huì)使一個(gè)臨界穩(wěn)定的壞路不穩(wěn)定。所以,實(shí)際使用的環(huán)路不但是穩(wěn)定的而且要遠(yuǎn)離臨界條件。這就是“相位裕度”的問題,定義為丌環(huán)增益降至OdB時(shí)開環(huán)相移量與π的差值,此概念可以說明環(huán)路穩(wěn)定的程度。
在實(shí)際的鎖相環(huán)電路中,不可避免地存在一些寄生相移,它們引入了額外的高頻極點(diǎn),不利于環(huán)路的穩(wěn)定性。環(huán)路相位裕度的理論值太小,考慮到寄生相移的影響,則實(shí)際相位裕度可能更小,會(huì)使環(huán)路不穩(wěn)定。
2.5信號(hào)流程圖
鎖相環(huán)的原理框圖如下:

2.7鎖相環(huán)原理框圖
其工作過程如下:
1壓控振蕩器的輸出Uo經(jīng)過采集并分頻;
2.輸出和基準(zhǔn)信號(hào)同時(shí)輸入鑒相器;
3.鑒相器通過比較上述兩個(gè)信號(hào)的頻率差,然后輸出一個(gè)直流脈沖電壓Ud;
4.Ud進(jìn)入到濾波器里面,濾除高頻成分后得到信息Ue;
5.Ue進(jìn)入到壓控震蕩器VCO里面,控制頻率隨輸入電壓線性地變化;
6.這樣經(jīng)過一個(gè)很短的時(shí)間,VCO的輸出就會(huì)穩(wěn)定于某一期望值。
2.6鎖相環(huán)的優(yōu)良特性
鎖相環(huán)廣泛應(yīng)用于無線領(lǐng)域,是其自身具有較好的特性:
1.載波跟蹤特性。無論輸入鎖相環(huán)的信號(hào)是已調(diào)制好的或未調(diào)制的,只要信號(hào)中包有載波 頻率成分就可將環(huán)路設(shè)計(jì)成一個(gè)窄帶跟蹤濾波器,跟蹤輸入信號(hào)載波成分的頻率與相位變化,環(huán)路輸出信號(hào)就是需要提取(或復(fù)制)的載波信號(hào)。這就是環(huán)路的載波跟蹤特性。
載波跟蹤特性包含這三重含義:一是窄帶。環(huán)路可以有效地濾除輸入信號(hào)伴隨的噪聲和干擾。環(huán)路主要是利用環(huán)路濾波器的低通特性來實(shí)現(xiàn)輸入信號(hào)的載頻上的窄帶帶通特性的,這比制作普通的窄帶帶通濾波器容易得多。在高載頻上,用鎖相環(huán)路可將通帶做到幾赫茲那么窄,這是普通帶通濾波器難以實(shí)現(xiàn)的。二是跟蹤。環(huán)路可以在保持窄帶特性的情況下跟蹤輸入載波頻率的漂移。普通帶通濾波器的頻率特性是固定的,為了能接收載頻漂移的輸入信號(hào),濾波器的通帶帶寬必須設(shè)計(jì)漂移范圍,因而無法利用窄帶特性來過濾噪聲與干擾。三是可將弱輸入載波信號(hào)放大到強(qiáng)信號(hào)輸出。因?yàn)榄h(huán)路輸出的是壓控振蕩器的信號(hào),它是輸入弱載波信號(hào)頻率與相位的真實(shí)復(fù)制品,其幅度則比輸入信號(hào)強(qiáng)的多。
2.調(diào)制跟蹤特性。只要讓環(huán)路有適當(dāng)寬度的低頻通帶,壓控振蕩器輸出信號(hào)的頻率與相位就能跟蹤輸入調(diào)頻或調(diào)相信號(hào)的頻率與相位的變化,即得到輸入角調(diào)制信號(hào)的復(fù)制品,這就是調(diào)制跟蹤特性。利用環(huán)路的調(diào)制跟蹤特性,可以制成角調(diào)制信號(hào)的調(diào)制器與解調(diào)器。
3.低門限特性。鎖相環(huán)路不像一般非線性器件那樣,門限取決于輸入信噪比,而是由環(huán)路信噪比決定的。一般環(huán)路的通頻帶總比環(huán)路輸入端的前置通頻帶窄的多,因而環(huán)路信噪比明顯高于輸入信噪比,環(huán)路能在低輸入信噪比條件下工作,即具有低門限的優(yōu)良特性。這樣,只要將環(huán)路設(shè)計(jì)成窄帶,就可把淹沒在噪聲中的微弱信號(hào)提取出來。這樣的環(huán)路用于解調(diào)調(diào)頻、調(diào)相信號(hào)時(shí),可取得門限擴(kuò)展的效果;用于解調(diào)數(shù)字調(diào)制信號(hào)時(shí),可使誤碼率降低。
2.7鎖相環(huán)的應(yīng)用
調(diào)頻波的特點(diǎn)是頻率隨調(diào)制信號(hào)幅度的變化而變化。壓控振蕩器的振蕩頻率取決于輸入電壓的幅度。當(dāng)載波信號(hào)的頻率與鎖相環(huán)的固有振蕩頻率![]() 相等時(shí),壓控振蕩器輸出信號(hào)的頻率將保持
相等時(shí),壓控振蕩器輸出信號(hào)的頻率將保持![]() 不變。若壓控振蕩器的輸入信號(hào)除了有鎖相環(huán)低通濾波器輸出的信號(hào)
不變。若壓控振蕩器的輸入信號(hào)除了有鎖相環(huán)低通濾波器輸出的信號(hào)![]() 外,還有調(diào)制信號(hào)
外,還有調(diào)制信號(hào)![]() ,則壓控振蕩器輸出信號(hào)的頻率就是以
,則壓控振蕩器輸出信號(hào)的頻率就是以![]() 為中心,隨調(diào)制信號(hào)幅度的變化而變化的調(diào)頻波信號(hào)。由此可得調(diào)頻電路可利用鎖相環(huán)來組成,由鎖相環(huán)組成的調(diào)頻電路組成框圖下圖所示。
為中心,隨調(diào)制信號(hào)幅度的變化而變化的調(diào)頻波信號(hào)。由此可得調(diào)頻電路可利用鎖相環(huán)來組成,由鎖相環(huán)組成的調(diào)頻電路組成框圖下圖所示。
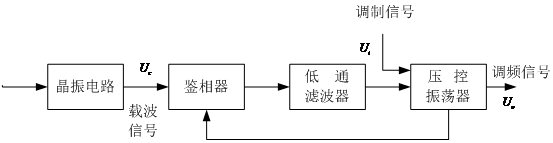 2.8鎖相環(huán)組成的調(diào)頻電路
2.8鎖相環(huán)組成的調(diào)頻電路
根據(jù)鎖相環(huán)的工作原理和調(diào)頻波的特點(diǎn)可得解調(diào)電路組成框圖如圖2.8所示。
2.7.2.鎖相環(huán)在頻率合成電路中的應(yīng)用
在現(xiàn)代電子技術(shù)中,為了得到高精度的振蕩頻率,通常采用石英晶體振蕩器。但石英晶體振蕩器的頻率不容易改變,利用鎖相環(huán)、倍頻、分頻等頻率合成技術(shù),可以獲得多頻率、高穩(wěn)定的振蕩信號(hào)輸出。輸出信號(hào)頻率比晶振信號(hào)頻率大的稱為鎖相倍頻器電路;輸出信號(hào)頻率比晶振信號(hào)頻率小的稱為鎖相分頻器電路。鎖相倍頻和鎖相分頻電路的組成框圖下圖所示。
 2.8鎖相倍頻和鎖相分頻電路
2.8鎖相倍頻和鎖相分頻電路
圖中的N大于1時(shí),為分頻電路;當(dāng)![]() 時(shí),為倍頻電路。
時(shí),為倍頻電路。
2.8本章小結(jié)
本章對(duì)鎖相環(huán)系統(tǒng)的基本原理及組成部件進(jìn)行了概括介紹,對(duì)鎖相環(huán)系統(tǒng)的捕獲、跟蹤性能,動(dòng)態(tài)特性以及鎖相環(huán)的自身特性等一些基本性能、概念給出了相關(guān)說明,指出鎖相環(huán)路所以能夠得到如此廣泛的應(yīng)用,是由其獨(dú)特的優(yōu)良性能所決定的。它具有載波跟蹤特性,作為一個(gè)窄帶跟蹤濾波器,提取淹沒在噪聲之中的信號(hào),在深空測(cè)控中有著廣泛的應(yīng)用。
第三章鎖相環(huán)的噪聲分析
鎖相環(huán)的輸入信號(hào)和各個(gè)模塊都包括了噪聲源,其輸出信號(hào)必然包含噪聲。噪聲是鎖相環(huán)的重要特性,設(shè)計(jì)中必須考慮。本章節(jié)主要分析了輸入信號(hào)的噪聲和壓控振蕩器的噪聲。在實(shí)際的工作過程中,壓控振蕩器的相位噪聲是鎖相環(huán)最主要的噪聲。
3.1鎖相環(huán)的輸入噪聲
如下所示,以采用RC![]() 積分濾波器的鎖相環(huán)為例。設(shè)輸入和輸出信號(hào)
積分濾波器的鎖相環(huán)為例。設(shè)輸入和輸出信號(hào)![]() 和
和![]() 。則由前面章節(jié)可得出傳輸函數(shù)為:
。則由前面章節(jié)可得出傳輸函數(shù)為:
![]() (3.1)
(3.1)
如果輸入相位偏差![]() 不隨時(shí)間變化,即為純正弦信號(hào)。當(dāng)
不隨時(shí)間變化,即為純正弦信號(hào)。當(dāng)![]() 時(shí),
時(shí),![]() 。同樣,假設(shè)
。同樣,假設(shè)![]() 變化緩慢,則上式的分母會(huì)接近
變化緩慢,則上式的分母會(huì)接近![]() ,所以
,所以![]() 仍然等于1,這表明輸出相位跟隨輸入相位,或者說是輸出頻率跟隨輸入頻率。
仍然等于1,這表明輸出相位跟隨輸入相位,或者說是輸出頻率跟隨輸入頻率。
如果![]() 變化非常快,上式表明輸出相位偏差氣,
變化非常快,上式表明輸出相位偏差氣,![]() 減小并最終為零,使得“
減小并最終為零,使得“![]() ,即輸入相位或者頻率變化太快,鎖相環(huán)不能跟蹤輸信號(hào)。輸入信號(hào)的相位噪聲被壞路中的低通濾波器整形最后出現(xiàn)在輸出端。為了減小噪聲,環(huán)路帶寬應(yīng)該盡量小,但這以降低鎖定范圍、限制捕獲范圍、降低穩(wěn)定性為代價(jià)。
,即輸入相位或者頻率變化太快,鎖相環(huán)不能跟蹤輸信號(hào)。輸入信號(hào)的相位噪聲被壞路中的低通濾波器整形最后出現(xiàn)在輸出端。為了減小噪聲,環(huán)路帶寬應(yīng)該盡量小,但這以降低鎖定范圍、限制捕獲范圍、降低穩(wěn)定性為代價(jià)。
3.2壓控振蕩器的噪聲
VCO的相位噪聲可以被認(rèn)為是一個(gè)外加信號(hào)![]() ,如下圖3.1所示。在此假設(shè),
,如下圖3.1所示。在此假設(shè),![]() 和
和![]() 是不相關(guān)的。假設(shè)
是不相關(guān)的。假設(shè)![]() =0,即表示輸入信號(hào)的相位偏差為零,輸入信號(hào)為一個(gè)嚴(yán)格的周期信號(hào)。得到從
=0,即表示輸入信號(hào)的相位偏差為零,輸入信號(hào)為一個(gè)嚴(yán)格的周期信號(hào)。得到從![]() 到
到![]() 的傳遞函數(shù):
的傳遞函數(shù):
![]() (3.2)
(3.2)
由上所得的輸入噪聲和傳遞函數(shù)有相同的極點(diǎn),但是它包括了兩個(gè)零點(diǎn)![]() 和
和![]() ,具有高通性。
,具有高通性。
原點(diǎn)上的零點(diǎn)表示,如果![]() 變化緩慢,則
變化緩慢,則![]() 很小。因?yàn)樵阪i定條件下,VC0的相位變化通過PD變成了電壓,加到VCO的控制輸入端,使相位朝相反的方向變化。由于VCO的電壓相位轉(zhuǎn)變對(duì)緩慢變化的控制電壓
很小。因?yàn)樵阪i定條件下,VC0的相位變化通過PD變成了電壓,加到VCO的控制輸入端,使相位朝相反的方向變化。由于VCO的電壓相位轉(zhuǎn)變對(duì)緩慢變化的控制電壓![]() 有無窮的增益,負(fù)反饋抑制了輸出相位變化。
有無窮的增益,負(fù)反饋抑制了輸出相位變化。
PLL可以簡化為下圖結(jié)構(gòu):一個(gè)理想的積分器位于負(fù)反饋環(huán)中,在輸入端
產(chǎn)生了一個(gè)“虛地’,因此,對(duì)于緩慢變化的![]() 。,則
。,則![]() =0。
=0。

3.1圖簡單的鎖相環(huán)VCO噪聲模擬
假設(shè)![]() 變化很快,則
變化很快,則![]() 的大小,以及環(huán)路增益都相應(yīng)減小,這樣,也會(huì)使“虛地”產(chǎn)生變化。當(dāng)
的大小,以及環(huán)路增益都相應(yīng)減小,這樣,也會(huì)使“虛地”產(chǎn)生變化。當(dāng)![]() 變化接近
變化接近![]() ,環(huán)路增益由于低通濾波器而減小。
,環(huán)路增益由于低通濾波器而減小。
從公式(3.2)可知,當(dāng)s→∞時(shí),有![]() 。即
。即![]() 當(dāng)變化非常快時(shí)環(huán)路相當(dāng)于開環(huán)狀態(tài)。
當(dāng)變化非常快時(shí)環(huán)路相當(dāng)于開環(huán)狀態(tài)。
利用壓控振蕩器傳遞函數(shù):,將電源加一個(gè)很小的階躍q,則輸出為:
![]() (3.3)
(3.3)
由上式有時(shí)間常數(shù)為1/![]() 。為了使PLL有快的鎖定特性,盡量將
。為了使PLL有快的鎖定特性,盡量將![]() 取大。
取大。
為了減小VCO的相位噪聲的影響,環(huán)路帶寬應(yīng)該盡量取大,而這與抑制輸入相位噪聲將環(huán)路噪聲帶寬盡量減小相矛盾。實(shí)際工程中,輸入信號(hào)主要來自晶體振蕩器,噪聲非常小,所以,PLL的輸入相位噪聲主要來自內(nèi)部的VCO,因此可以將環(huán)路帶寬適當(dāng)取大。
3.3相位噪聲的抑制
鎖相環(huán)的抖動(dòng)主要是由相位噪聲或邊帶引起的。而產(chǎn)生隨機(jī)抖動(dòng)和相位噪聲的原因,可以簡單認(rèn)為是電源噪聲、襯底噪聲和器件噪聲。邊帶則基本上是由控制路徑上的周期性擾動(dòng)引起的。
結(jié)合實(shí)際,抖動(dòng)產(chǎn)生的原因如有:
1.電源噪聲和襯底噪聲,引起了受電壓影響的電容(如MOS管的Cgd)的變化,導(dǎo)致振蕩器頻率的變化。可以把電源和襯底也作為VCO的控制電壓來分析VCO的頻率特性;
2.襯底噪聲,襯底噪聲會(huì)導(dǎo)致器件閾值電壓![]() 的改變;
的改變;
3.器件噪聲(熱噪聲、閃爍噪聲),閃爍噪聲隨著振蕩器(VCO)的頻率慢慢變化,它能夠通過增加PLL的帶寬來抑制。熱噪聲可以通過版圖的方法減小。減小![]() 噪聲要增加器件面積。
噪聲要增加器件面積。
在PLL設(shè)計(jì)過程中,應(yīng)當(dāng)盡量遵循以下原則來減小抖動(dòng):
1.將緩沖控制電壓(buffered control voltage)作為電源電壓。
2.用緩沖控制電壓去產(chǎn)生偏置電流,電流源隔離。
3.采用Cascode電流源或鏡像電流源,可以將敏感性降到O.5%。
4.用阱器件來做電流源和環(huán)路濾波電容。
5.將控制電壓做在阱上面(避免襯底的影響)。
3.4本章小結(jié)
本章對(duì)鎖相環(huán)系統(tǒng)噪聲進(jìn)行了概括介紹,對(duì)鎖相環(huán)系統(tǒng)的輸入噪聲,相位噪聲給出了相關(guān)說明及減小噪聲的一些措施,指出鎖相環(huán)路設(shè)計(jì)中應(yīng)該盡可能的減小噪聲帶來的影響,實(shí)際意義很重要。
第四章二階鎖相環(huán)仿真及結(jié)果
4.1仿真介紹
仿真使用的軟件是MATLAB7.0。由于MATLAB仿真軟件適合多學(xué)科、多種工作平臺(tái)且功能強(qiáng)大、界面友好、方便快捷、語言自然并且開放性強(qiáng)的大型優(yōu)秀應(yīng)用軟件,已經(jīng)也已成為國內(nèi)外高等院校高等數(shù)學(xué)、數(shù)值分析、數(shù)字信號(hào)處理、自動(dòng)控制理論以及工程應(yīng)用等課程的基本教學(xué)工具。使用Matlab對(duì)鎖相環(huán)仿真的實(shí)現(xiàn)是方便快捷的。
仿真所采有的是二階鎖相環(huán)。這是由于我們實(shí)際應(yīng)用中的絕大多數(shù)PLL,或者是二階的,或者是通過忽略高階效應(yīng)(至少在初步設(shè)計(jì)時(shí))而被設(shè)計(jì)成近似的二階環(huán)路。鑒于二階鎖相環(huán)在實(shí)際應(yīng)用的意義,所以在仿真采用了二階鎖相環(huán)。
4.3仿真結(jié)果

上圖是利用MATLAB提供的函數(shù)將計(jì)算結(jié)果圖形化功能建立的。在運(yùn)行程序后,就會(huì)出現(xiàn)上面的對(duì)話框,點(diǎn)擊點(diǎn)擊其中的任何一項(xiàng)就會(huì)出現(xiàn)相應(yīng)的仿真圖形。上圖中包含了輸入頻率和VCO頻率,輸入相位和VCO相位,頻率誤差,相位誤差,相位空間波特圖,相位空間和時(shí)域,退出程序等選項(xiàng)。
運(yùn)行程序后出現(xiàn)如下指令:
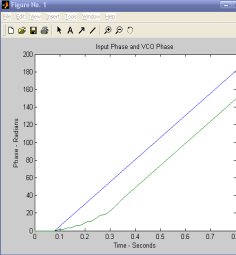
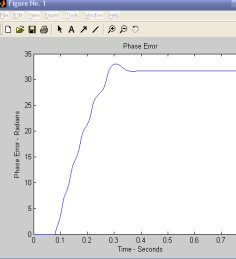
圖4.2中藍(lán)線為輸入相位,綠線代表VCO相位,從圖中可以看見隨著時(shí)間的變化輸入信號(hào)相位為線性,而VCO相位則是經(jīng)歷了一段曲線后斜率與輸入信號(hào)相位斜率相同,輸出相位跟隨輸入相位,達(dá)到穩(wěn)定。圖4.3中VCO的相位也是先經(jīng)歷了一段時(shí)間的曲線后變?yōu)橐粭l直線達(dá)到穩(wěn)定。根據(jù)鎖相環(huán)的基本原理我們可知鎖相環(huán)是個(gè)反饋網(wǎng)絡(luò),它是由輸出信號(hào)(VCO產(chǎn)生)與參考頻率在頻率和相位上保持同步或者保持常數(shù)。由此我們可以看出鎖相環(huán)工作后,在最初的一段時(shí)間中鎖相環(huán)開始工作,輸入信號(hào)經(jīng)過鑒相器,環(huán)路慮波器后,將輸出相位反饋給VCO壓控振蕩器,使壓控振蕩器與輸入頻率逐步實(shí)現(xiàn)同步,保持一個(gè)常數(shù),實(shí)現(xiàn)鎖定。其中經(jīng)歷了鎖相環(huán)的失鎖、跟蹤、捕獲、鎖定,從而達(dá)到最后達(dá)到穩(wěn)定狀態(tài)。從開始到達(dá)到穩(wěn)定的這段時(shí)間則為做捕獲時(shí)間。
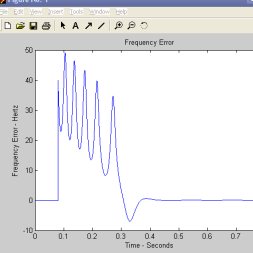
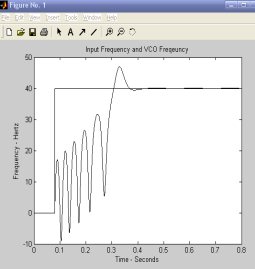 圖4.4 頻率差圖 圖4.5 輸入頻率和VCO頻率圖
圖4.4 頻率差圖 圖4.5 輸入頻率和VCO頻率圖圖4..4與圖4.5也顯示了鎖相環(huán)工作后從失鎖、跟蹤、捕獲、鎖定的過程,過程。從不停的擺動(dòng)到最后的直線狀態(tài),這個(gè)過程稱為鎖定過程。其中我們可以發(fā)現(xiàn)在捕捉過程中隨著捕捉次數(shù)的增加,捕捉過程也變得較慢,這說明此時(shí)的的鎖相環(huán)工作平率處在穩(wěn)定工作的動(dòng)態(tài)界限內(nèi),工作正常。
4.4本章小結(jié)
本章介紹了仿真的環(huán)境以及二階鎖相環(huán)的仿真過程,并對(duì)其仿真結(jié)果進(jìn)行了分析。在前三章的理論基礎(chǔ)上,通過使用MATLAB7.0進(jìn)行了仿真。實(shí)驗(yàn)結(jié)果表明:用MATLAB進(jìn)行的二階鎖相環(huán)仿真達(dá)到了最初的設(shè)想,鎖相環(huán)的失鎖、跟蹤、捕獲、鎖定各個(gè)階段均有體現(xiàn)。達(dá)到了最初仿真的要求。
結(jié) 論
本文在閱讀一些文獻(xiàn)和對(duì)鎖相環(huán)有一定程度了解的基礎(chǔ)上,運(yùn)用MATLAB進(jìn)行了仿真。本文完成了以下工作:
由于時(shí)間和條件的限制,在設(shè)計(jì)工作中有些工作沒有做到,留待進(jìn)一步的完善,后續(xù)工作是:
目前鎖相環(huán)技術(shù)在通信中早已成熟,隨著科技的發(fā)展,目前的鎖相環(huán)都是基于半導(dǎo)體工藝的集成電路。對(duì)于未來而言,用鎖相環(huán)的集成化設(shè)計(jì)減小相應(yīng)噪聲、提高鎖相環(huán)的頻率預(yù)測(cè)精度、硬件系統(tǒng)的運(yùn)算速率以及降低干擾也是其研究的一個(gè)重要方向。
 鎖相環(huán)與MATLAB仿真.doc
(508 KB, 下載次數(shù): 50)
鎖相環(huán)與MATLAB仿真.doc
(508 KB, 下載次數(shù): 50)
| 歡迎光臨 (http://www.zg4o1577.cn/bbs/) | Powered by Discuz! X3.1 |