1 �wՓ�F(xi��n)��(ch��ng)���������Ǒ�(y��ng)���ڹ��I(y��)�F(xi��n)��(ch��ng)�����ÿ�����ʽ�B�Ӷ���(g��)�O(sh��)�䣬���ڂ�ݔ���I(y��)�F(xi��n)��(ch��ng)���N��(sh��)��(j��)��һ�ͨ��ϵ�y(t��ng)[1]��CAN��Controller Area Network�������ǬF(xi��n)��(ch��ng)������һ��(g��)��֧��������кܸߵĿɿ��Ժ����܃r(ji��)��ȣ��ѽ�(j��ng)�ɞ��(gu��)�H��(bi��o)��(zh��n)���ڹ��I(y��)�^(gu��)�̱O(ji��n)���O(sh��)��Ļ��B����õ��V����(y��ng)�ã��ܵ����I(y��)��ďV����ҕ�����ѱ����J(r��n)��N����ǰ;�ĬF(xi��n)��(ch��ng)����֮һ��
1.1 �о������S��Ӌ(j��)��C(j��)Ӳ����ܛ�����g(sh��)�������·���g(sh��)��Ѹ�ٰl(f��)չ�����I(y��)����ϵ�y(t��ng)�ѳɞ�Ӌ(j��)��C(j��)���g(sh��)��(y��ng)���I(l��ng)�����������һ��(g��)��֧����ȡ���˾��M(j��n)�������ڌ�(du��)ϵ�y(t��ng)�ɿ��Ժ��`���Եĸ�Ҫ���I(y��)����ϵ�y(t��ng)�İl(f��)չ��Ҫ���F(xi��n)�飺���ƶ�Ԫ����ϵ�y(t��ng)�����ɢ������ؓ(f��)�d��ɢ�����ܷ�ɢ��Σ�U(xi��n)��ɢ�͵����ɢ����ɢʽ���I(y��)����ϵ�y(t��ng)���Ǟ��m��(y��ng)�@�N��Ҫ���l(f��)չ����(l��i)�ġ��@�ϵ�y(t��ng)�����͙C(j��)����ģ���5C���g(sh��)����Computer��Ӌ(j��)��C(j��)���g(sh��)����Control���Ԅ�(d��ng)���Ƽ��g(sh��)����Communication��ͨ�ż��g(sh��)����CRT���@ʾ���g(sh��)����Change���D(zhu��n)�Q���g(sh��)���o�ܽY(ji��)�ϵĮa(ch��n)������m��(y��ng)�������ɔU(ku��)չ�ԡ��ɾS�o(h��)���Լ������������ȷ��棬�^֮��ɢ�̓x������ϵ�y(t��ng)�ͼ�����Ӌ(j��)��C(j��)����ϵ�y(t��ng)���������@�ă�(y��u)Խ�ԡ����͵ķ�ɢʽ����ϵ�y(t��ng)�ЬF(xi��n)��(ch��ng)�O(sh��)�䡢�ӿ��cӋ(j��)���O(sh��)���Լ�ͨ���O(sh��)��M�ɣ��F(xi��n)��(ch��ng)������Field bus���������@�N�����®a(ch��n)����[2]��
1.2 �о�Ŀ�ĺ����x��19���o(j��)�l(f��)����܇�ԁ�(l��i)���˂���һֱ�ڳ��������m�ԡ���ȫ�ԺͲٿ��Է��治ͣ�،�(du��)���M(j��n)�иĸ�̈́�(chu��ng)�£�܇�ϵ�����O(sh��)��ҲԽ��(l��i)Խ�ࡣ�@Щ����O(sh��)��������Ҫ�f(xi��)ͬ�����ģ��@��Ҫ�������֮�g�ܻ���ͨ��[1]��
���˽�Q��܇ͨ�ņ�(w��n)�}��CAN��bus��(y��ng)�\(y��n)�������{��ɿ�����(sh��)�r(sh��)����(j��ng)��(j��)���`������c(di��n)��CAN�����ܿ��������ИI(y��)�õ��V����(y��ng)�ã��e���ڹ��I(y��)�����I(l��ng)��������~��ˮ���F(xi��n)��CAN��bus�����ѽ�(j��ng)�ɞ�ȫ����(n��i)����Ҫ�ĬF(xi��n)��(ch��ng)����֮һ���������I(l��ng)���F(xi��n)��(ch��ng)�����İl(f��)չ��
���I(y��)����ϵ�y(t��ng)�漰����ܛ��Ӳ��ģ�K���o������O(sh��)Ӌ(j��)���{(di��o)ԇ����(l��i)һ���y�ȡ����������ϡ���λ�C(j��)�g(li��n)ϵ�~����CAN����ͨ�Ų��֣�һ��������(g��)ϵ�y(t��ng)�\(y��n)�����g�l(f��)����(w��n)�}�����]�����õ��˙C(j��)����͜y(c��)ԇ�ֶΣ������y���r(sh��)��(zh��n)�_���ҵ����ų����ϡ�ͬ�ӣ��ڿ���ϵ�y(t��ng)�������^(gu��)���У����˱M���ܵp�ٹ��ϺͿsС���Ϸ�����Ҳ��(y��ng)�O(sh��)Ӌ(j��)����(y��ng)�Ĝy(c��)ԇܛ����(l��i)���wؓ(f��)؟(z��)CAN����ͨ�ż��ӿڲ��ֵ��{(di��o)ԇ���\(y��n)���΄�(w��)���ʴˣ����n�}���������VC�O(sh��)Ӌ(j��)CAN�����y(c��)ԇܛ���M(j��n)�н�B��
1.3 ��(gu��)��(n��i)��l(f��)չ�F(xi��n)���ԏ�Bosch�cIntel��˾��1986����ʽ�l(f��)��CAN��busͨ�ŷ�ʽ�����R��BMW����˾�ܿ���1989���Ƴ���һ��ʹ��CAN��busͨ�ŵ���܇���Ĵ� CAN��bus�_ʼ�����x�͵Ěv�̣���1��1990�꣬���Y��˾�l(f��)���˵�һ�vʹ��CAN��bus���I܇���F(xi��n)�ڎ�ÿһ�v�����a(ch��n)����܇���b����CAN��bus�W(w��ng)�j(lu��)����2��1993�꣬CAN��bus�������ƶ��ɞ��(gu��)�H��(bi��o)��(zh��n)ISO11898�����ّ�(y��ng)�ã���ISO11519�����ّ�(y��ng)�ã�����3��1994�꣬�W������CiA�S�̅f(xi��)��(hu��)����������ODVA�S�̅f(xi��)��(hu��)�����T֧��CAN��bus�����ăɴ�(y��ng)�ÌӅf(xi��)�h����CANopen�f(xi��)�h�cDeviceNet�f(xi��)�h[3]��
��CiA��Ŭ���ƏV�£�CAN���g(sh��)����܇��ӿ���ϵ�y(t��ng)����ݿ���ϵ�y(t��ng)����ȫ�O(ji��n)��ϵ�y(t��ng)���t(y��)���x���������C(j��)е�������\(y��n)ݔ?sh��)ȷ�����õ��ˏV���đ�(y��ng)�á��F(xi��n)����400��ҹ�˾������CiA��CiA�ѳɞ�ȫ��(y��ng)��CAN���g(sh��)�ę�(qu��n)����
��(gu��)��(n��i)��CAN����������о��͑�(y��ng)���ڇ�(gu��)�����߀�������@�IJ�࣬�w�F(xi��n)�ڃɂ�(g��)���棺��1����(gu��)��(n��i)�������о����_�l(f��)��܇���CAN�W(w��ng)�j(lu��)������̎��ԇ�(y��n)�����A�Σ���(gu��)��(n��i)�^�ֵ���܇߀�]�в�����܇�����O(sh��)Ӌ(j��)����2����(gu��)��(n��i)��܇���Y��I(y��)�����Ѳ���CAN�������g(sh��)�������ļ��g(sh��)�������������С���협�(y��ng)������܇���I(y��)�l(f��)չ��څ��(sh��)���҇�(gu��)Ҳ����(y��ng)�ӏ�(qi��ng)�ˌ�(du��)CAN�������о������_�l(f��)��������֪�R(sh��)�a(ch��n)��(qu��n)��CAN�����a(ch��n)Ʒ��
CAN���g(sh��)�ё�(y��ng)���ڼ�����������ܘ����Լ�С�^(q��)���O(sh��)�С��S���o(w��)�����g(sh��)�����ƺ͌��o(w��)�����g(sh��)��(y��ng)�õ�CAN����ϵ�y(t��ng)���о��IJ������룬���Ԙ�(l��)�^���A(y��)Ӌ(j��)��δ��(l��i)CAN�������g(sh��)�đ�(y��ng)�Ì��o(w��)̎���ڣ�̓�M��CAN���������Q��[5]��
1.4 Փ�ĽY(ji��)��(g��u)�������ĵ�һ�½�B��CAN�������о������͇�(gu��)��(n��i)��l(f��)չ�F(xi��n)�����B���n�}�о���Ŀ�ĺ����x���ڶ��º�(ji��n)�ν�B��CAN����ͨ��Ҏ(gu��)����SJA1000�������������º�(ji��n)�ν�B���_�l(f��)�h(hu��n)����CAN�ӿڿ���������Ԕ��(x��)��B��ܛ�����O(sh��)Ӌ(j��)�^(gu��)�̣������(q��)��(d��ng)���b���ӿڿ�����(sh��)��(k��)�f(shu��)���������O(sh��)Ӌ(j��)�����ܷ����c�O(sh��)Ӌ(j��)�������½�B��ܛ���Ĝy(c��)ԇ������İl(f��)����
2 CAN�����f(xi��)�h����2.1 CAN��bus Ҏ(gu��)��V2.0 �汾CAN Ҏ(gu��)�����g(sh��)Ҏ(gu��)���Ƀɲ��ֽM�ɣ�
• A ���֣�CAN �Ĉ�(b��o)�ĸ�ʽ�f(shu��)������CAN1.2 Ҏ(gu��)�����x����
• B ���֣���(bi��o)��(zh��n)��ʽ�͔U(ku��)չ��ʽ���f(shu��)����
2.1.1 CAN�ķӽY(ji��)��(g��u)��CAN V2.0A�CAN����(x��)�֞�����(g��)�ӴΣ���(du��)��ӡ���ݔ�ӡ�����ӡ�
����PartB�У�CAN����(x��)�֞�ɂ�(g��)�ӴΣ���(sh��)��(j��)�·�ӣ�߉�·�����ӌ�LLC��ý�w�L��(w��n)�����ӌ�MAC��������ӡ�
2.1.2 ��(b��o)�Ă�ݔ(1)�����
��(b��o)�Ă�ݔ��5�N��͵Ď�����ʾ�Ϳ��ƣ������քe�ǔ�(sh��)��(j��)�����h(yu��n)�̎����e(cu��)�`�����^(gu��)�d���͎��g��������;���2.1���С�
��2.1 ������ͼ���;
| |
| ���ڰl(f��)��(ji��)�c(di��n)����ܹ�(ji��)�c(di��n)���͔�(sh��)��(j��)����ʹ�����Ď���� |
| ���ڽ��ܹ�(ji��)�c(di��n)��ij��(g��)�l(f��)��(ji��)�c(di��n)Ո(q��ng)��(sh��)��(j��) |
| ���ڙz�y(c��)��ͨ���e(cu��)�`����У�(y��n)�e(cu��)�`���r(sh��)��������(ji��)�c(di��n)�l(f��)��֪ͨ |
| ���������еĺͺ��m(x��)�Ĕ�(sh��)��(j��)�������h(yu��n)�̎���֮�g�ṩһ���ӵ��ӕr(sh��) |
| ���ڌ���(sh��)��(j��)�����h(yu��n)�̎��cǰ��Ď����x�_��(l��i) |
1�� ��(sh��)��(j��)��
��(sh��)��(j��)����7 ��(g��)��ͬ��λ��(ch��ng)�M�ɣ�����ʼ���ٲÈ�(ch��ng)�����ƈ�(ch��ng)����(sh��)��(j��)��(ch��ng)��CRC ��(ch��ng)����(y��ng)����(ch��ng)�����Y(ji��)β����(sh��)��(j��)�����εĹ������2.2���С�
��2.2 ��(sh��)��(j��)�����εĹ���
| | |
| | ��ʾ��(sh��)��(j��)���_ʼ���Ɇ�(g��)�@��λ��(g��u)�ɣ��ڿ������e�r(sh��)�����S�l(f��)�� |
| | | ��ʾԓ���ă�(y��u)�ȼ�(j��)����11λID�a��1λ�h(yu��n)�̎���(bi��o)־λ��RTR���M�� |
| | ��ʾԓ���ă�(y��u)�ȼ�(j��)����29λID�a��1λ����h(yu��n)�̎�Ո(q��ng)��λ��SRR����1λ��(bi��o)־λ�U(ku��)չλ��IDE����1λ�h(yu��n)�̎���(bi��o)־λ��RTR���M�� |
| | ��ʾ��(sh��)��(j��)�Δ�(sh��)��(j��)�L(zh��ng)�ȵľ��a�ͱ���λ |
��(sh��)��(j��)��(ch��ng) | | ��(sh��)��(j��)��(n��i)�ݣ�ÿ�ֹ�(ji��)��8λ�����w�ֹ�(ji��)��(sh��)�ڿ��ƶ����w�F(xi��n) |
| | �z�鎬�Ă�ݔ�e(cu��)�`�����������Ď���ʼ����(sh��)��(j��)�ε����Ѓ�(n��i)�ݣ����������λ�� |
| | �������ܹ�(ji��)�c(di��n)�_�J(r��n)ԓ������������ |
| | ��ʾ��(sh��)��(j��)���Y(ji��)�� |
2�� �h(yu��n)�̎�
�h(yu��n)�̎���6 ��(g��)��ͬ��λ��(ch��ng)�M�ɣ�����ʼ���ٲÈ�(ch��ng)�����ƈ�(ch��ng)��CRC ��(ch��ng)����(y��ng)����(ch��ng)�����Y(ji��)β��
3�� �e(cu��)�`��
�e(cu��)�`���Ƀɂ�(g��)��ͬ�Ĉ�(ch��ng)�M�ɡ���һ��(g��)��(ch��ng)�����鲻ͬվ�ṩ���e(cu��)�`��(bi��o)־�įB�ӡ��ڶ���(g��)��(ch��ng)���e(cu��)�`�綨�����e(cu��)�`��(bi��o)־�ЃɷN��ʽ������(d��ng)�e(cu��)�`��(bi��o)־�ͱ���(d��ng)�e(cu��)�`��(bi��o)־���e(cu��)�`�綨������8 ��(g��)���[�ԡ���λ��
4�� �^(gu��)�d��
�^(gu��)�d�������ɂ�(g��)λ��(ch��ng)���^(gu��)�d��(bi��o)־���^(gu��)�d�綨����
5�� ���g���g
��(sh��)��(j��)�������h(yu��n)�̎����c��ǰ�掬�ĸ��x��ͨ�^(gu��)���g���g��(sh��)�F(xi��n)�ģ��o(w��)Փ��ǰ��Ď������ͣ���(sh��)��(j��)�����h(yu��n)�̎����e(cu��)�`�����^(gu��)�d����������ͬ���ǣ��^(gu��)�d���c�e(cu��)�`��֮ǰ�]�Ў��g���g������(g��)�^(gu��)�d��֮�gҲ�����Ɏ��g���g���x�ġ�
��2���l(f��)����/�������Ķ��x
�l(f��)����:�a(ch��n)����(b��o)�ĵĆ�Ԫ���Q֮���(b��o)�ĵġ��l(f��)���������ˆ�Ԫ���������(b��o)�İl(f��)����ֱ���������F(xi��n)���e��ˆ�Ԫʧȥ�ٲÞ�ֹ��
�������������һ��Ԫ�������(b��o)�ĵİl(f��)�������ҿ���Ҳ�����e���t�@һ��Ԫ�ͱ��Q֮���(b��o)�ĵġ�����������
2.1.3 ��(b��o)�ęz�(y��n)У�(y��n)��(b��o)���Ƿ���Ч�ĕr(sh��)�g�c(di��n)����(du��)�ڰl(f��)�����c�������Ǹ�����ͬ�ġ�
��(du��)�ڰl(f��)���������ֱ������ĩβλ���]���e(cu��)�`���t�ˈ�(b��o)�Č�(du��)�ڰl(f��)������Ч�������(b��o)���Ɠp���t��(b��o)�ĕ�(hu��)����(j��)��(y��u)�ș�(qu��n)�Ԅ�(d��ng)�ذl(f��)�������܉��������Ϣ��(j��ng)��(zh��ng)����������ݔ����ڿ������e�r(sh��)����(d��ng)��
��(du��)�ڽ����������ֱ��һ����λ(���ˎ�ĩβλ)���]���e(cu��)�`���t��(b��o)�Č�(du��)�ڽ�������Ч��
2.1.4 ���aλ�����a�����IJ��֣��T�玬��ʼ���ٲÈ�(ch��ng)�����ƈ�(ch��ng)����(sh��)��(j��)��(ch��ng)�Լ�CRC���У���ͨ�^(gu��)λ���ķ������a��
��(sh��)��(j��)�����h(yu��n)�̎�(CRC�綨������(y��ng)����(ch��ng)�͎�ĩβ)��ʣ��λ��(ch��ng)��ʽ��ͬ������䡣�e(cu��)�`�����^(gu��)�d������ʽҲ��ͬ��������ͨ�^(gu��)λ���ķ����M(j��n)�о��a��
��(b��o)�����λ�����ò��w�㾎�a(NRZ)���@�����f(shu��)��������(g��)λ�r(sh��)�g�λ�ƽҪô�顰�@�ԡ���Ҫô�顰�[�ԡ���
2.1.5 �e(cu��)�`̎���e(cu��)�`�z�y(c��)����5�N��ͬ���e(cu��)�`���(�@5�N�e(cu��)�`����(hu��)��ų�)��λ�e(cu��)�`������e(cu��)�`��CRC�e(cu��)�`����ʽ�e(cu��)�`����(y��ng)���e(cu��)�`
�e(cu��)�`��(bi��o)־���z�y(c��)���e(cu��)�`�l����վͨ�^(gu��)�l(f��)���e(cu��)�`��(bi��o)־ָʾ�e(cu��)�`��
2.1.6 ���Ͻ綨���ڹ��Ͻ綨����Ԫ�Ġ�B(t��i)���ܞ��������N֮һ��
�e(cu��)�`����(d��ng)�������������c����ͨӍ�����e(cu��)�`���z�y(c��)���r(sh��)�l(f��)������(d��ng)�e(cu��)�`��(bi��o)־��
�e(cu��)�`����(d��ng)�������S�l(f��)������(d��ng)�e(cu��)�`��(bi��o)־��
�����P(gu��n)�]�������S�ڿ��������κε�Ӱ�(���磬�P(gu��n)�]ݔ���(q��)��(d��ng)��)��
2.1.7 λ���r(sh��)Ҫ����(bi��o)�Qλ���ʣ���(bi��o)�Qλ���ʞ�һ����İl(f��)�����ڛ]������ͬ������r��ÿ��l(f��)�͵�λ��(sh��)����
��(bi��o)�Qλ�r(sh��)�g����(bi��o)�Qλ�r(sh��)�g=1����(bi��o)�Qλ����
���ј�(bi��o)�Qλ�r(sh��)�g���ֳɎׂ�(g��)���دB�ĕr(sh��)�gƬ�Σ������ǣ�ͬ���Ρ������r(sh��)�g�Ρ���λ���_��1����λ���_��2��
2.1.8 ��(b��o)�ĞV����CAN2��0B�У�߀���������P(gu��n)��(b��o)�ĞV���Ķ��x��
��(b��o)�ĞV��ȡ�Q������(g��)�R(sh��)�e�������S�ڈ�(b��o)�ĞV���Ќ��κε��R(sh��)�e��λ�O(sh��)�Þ顰�����]���Ŀ��x���μĴ����������x���M���R(sh��)�e����ʹ֮��ӳ�䵽�`�ٵĽ��վ��_���
���ʹ�����μĴ���������ÿһ��(g��)λ����ǿɾ��̵ģ����������܉����S���ֹ��(b��o)�ĞV�������μĴ������L(zh��ng)�ȿ���������(g��)�R(sh��)�e����Ҳ���������ֵ��R(sh��)�e����
2.1.9 ��ʎ���ݲ����ڽo����������ʎ�������ݲ��1��58������ˑ{��(j��ng)�(y��n)�Ɍ��մ��C����ʹ���ڂ�ݔ�ʸ��_(d��)125kbit��s�đ�(y��ng)���֡�
���˝M��CAN�f(xi��)�h������(g��)�����ٶȷ�������Ҫʹ�þ����������ʎ��(zh��n)�_��Ҫ���оƬ���Q����������(ji��)�c(di��n)����ʎ��(zh��n)�_�ȡ�
2.2 CAN������SJA1000��λ�C(j��)��CAN�����W(w��ng)�j(lu��)�ӿ�ʹ��Philips��˾��SJA1000оƬ��SJA1000��һ��(g��)��(d��)����CAN������������һϵ�����M(j��n)�Ĺ��ܣ��m���ڶ�N��(y��ng)�ã��e��ϵ�y(t��ng)��(y��u)�����\��;S�o(h��)����dz���Ҫ��
SJA1000�������CAN����ͨ�Ņf(xi��)�h��Ҫ���ȫ�����ԣ����c��(d��)��CAN�������Ƶ�PCA82C200��ȫ���ݣ�����֧��CAN2.0B�f(xi��)�h���U(ku��)չ���վ��_��������(qi��ng)�e(cu��)�`̎������������(qi��ng)�(y��n)�՞V�����ܵ��������ܡ�
SJA1000����ֱ���M(j��n)��CAN������(li��n)����PC�C(j��)������λ�C(j��)����ͨ�^(gu��)USB��|�B�ӵ�CAN�ӿڿ��ϵģ��@���҂�ʹ�õ����Մ�(chu��ng)��ӵ�CANUSB���I(y��)��(j��)�p·���ܽӿڿ���ԓ�ӿڿ��е�CAN������(sh��)��(j��)�հl(f��)Ҳ����SJA1000CAN��������82C250CAN�հl(f��)����ɵģ����C(j��)ͨ�^(gu��)USB��|��(l��i)�L��(w��n)CAN���������Ķ���(sh��)�F(xi��n)��(sh��)��(j��)ͨ�š�
2.3 ����С�Y(ji��)������Ҫ��B��CAN����ͨ��ϵ�y(t��ng)��λ�C(j��)ͨ��ܛ�����O(sh��)Ӌ(j��)���漰�Ļ���֪�R(sh��)������CAN��busҎ(gu��)����CAN������SJA1000�������@Щ֪�R(sh��)�����ܱ��Cܛ���O(sh��)Ӌ(j��)��������_չ��
3 �_�l(f��)�h(hu��n)����B3.1 �_�l(f��)�h(hu��n)��CAN����ͨ��ϵ�y(t��ng)��λ�C(j��)ͨ��ܛ�����O(sh��)Ӌ(j��)��(y��ng)����ֱ�^�Ĵ������^���S�������Ի����Ѻý��棬���ڲ����;S�o(h��)����Visual C++6.0���g���ṩ�ˏ�(qi��ng)����o�������������@Щ���߿��Ժܷ�����O(sh��)Ӌ(j��)�����n�}��Ҫ��đ�(y��ng)�ó���
����Visual C++6.0�_�l(f��)��(y��ng)�ó���r(sh��)����Ҫ�ЃɷN������һ�N������Windows�����ṩ��API����(sh��)���̣���һ�N��ֱ��ʹ��Miscrosoft�ṩ��MFC�(k��)���̡����n�}ʹ�õ���MFC�(k��)���̡�
MFC�(k��)����Microsoft��˾�ṩ���Á�(l��i)����Windows��(y��ng)�ó����C++��ϣ���ԓ��Ϸ��b��Windows�־��̌�(du��)����c�������P(gu��n)�IJ�����MFC���Ñ��ṩ��һ��(g��)Windows�h(hu��n)���µđ�(y��ng)�ó����ܺ̈́�(chu��ng)����(y��ng)�ó���ĽM����ʹ���@��(g��)��(y��ng)�ó����ܺͽM���������p�ɵؾ��������N��ͬ�đ�(y��ng)�ó���
��Visual C++6.0�У���������MFC AppWizard��(y��ng)�ó�����?q��)����ٵ?chu��ng)��һ��(g��)��(bi��o)��(zh��n)��Windows��(y��ng)�ó����ܣ�ֻ���ڴ˻��A(ch��)�����ӌ�(sh��)�F(xi��n)�ض����ܵij�����a���ܾ���������(y��ng)��Windows��(y��ng)�ó���ԓ��(y��ng)�ó���������а��������N���������õđ�(y��ng)�ó�����ͣ�?ji��n)��ęn�����ęn�ͻ��ڌ�(du��)Ԓ��đ�(y��ng)�ó����ڌ�(du��)Ԓ��(y��ng)�ó����ܺ�(ji��n)�Ρ��Y(ji��)��(g��u)�o������(zh��)���ٶȿ죬����Դ���a�٣��_�l(f��)�{(di��o)ԇ���ף����ϱ��n�}���ʱ��n�}���û��ڌ�(du��)Ԓ��(y��ng)�ó���
3.2 CANUSB����/������CAN�ӿڿ�3.2.1 �a(ch��n)Ʒ����CANUSB����/������CAN�ӿڿ�����USB1.1��USB2.0����������1·/2·CAN�ӿڵĹ��I(y��)��(j��)������CAN��(sh��)��(j��)�ӿڿ�������CANUSB����/������CAN�ӿڿ���PC����ͨ�^(gu��)USB�����B����CAN�W(w��ng)�j(lu��)����(g��u)�Ɍ�(sh��)�(y��n)�ҡ����I(y��)���ơ�����С�^(q��)��CAN�W(w��ng)�j(lu��)�I(l��ng)���Д�(sh��)��(j��)̎������(sh��)��(j��)�ɼ���
CANUSB����/������CAN�ӿڿ���CAN�a(ch��n)Ʒ�_�l(f��)��CAN��(sh��)��(j��)�����ď�(qi��ng)�ߣ�ͬ�r(sh��)�������w�eС�����弴�õ����c(di��n)��Ҳ�DZ�yʽϵ�y(t��ng)�Ñ�������x��
3.2.2 ����CAN�ӿڿ�Ӳ���ӿ�����CANUSB����/������CAN�ӿڿ�����2·CANͨ����ÿһ·ͨ�����Ǫ�(d��)���ģ����������B��һ��(g��)CAN��bus�W(w��ng)�j(lu��)����CAN��bus�ӿڵ��O(sh��)�䡣CANUSB����/������CAN�ӿڿ��������£�

�D3.1 CANUSB����/������CAN�ӿڿ��������
2·CAN��busͨ����1��(g��)10Pin�Ӿ������������Ӿ����ӵ����_Ԕ��(x��)���x���±���ʾ��
��3.1 CANUSB����/��ӿڿ���CAN��bus��̖(h��o)����
| | | |
| | | |
| | �K����裨��(n��i)���B�ӵ�CANL1�� |
| | |
| | �K����裨��(n��i)���B�ӵ�CANH1�� |
| | |
| | | |
| | �K����裨��(n��i)���B�ӵ�CANL0�� |
| | |
| | �K����裨��(n��i)���B�ӵ�CANH0�� |
| | |
3.3 ����С�Y(ji��)���½�B��CAN����ͨ��ϵ�y(t��ng)��λ�C(j��)ͨ��ܛ�����_�l(f��)�h(hu��n)����CANUSB����/������CAN�ӿڿ������˫@��ֱ�^�Ĵ������^���S�������Ի����Ѻý��棬���n�}����Visual C++6.0�µ�MFC�(k��)�_�l(f��)����
4 CANͨ��ܛ���O(sh��)Ӌ(j��)4.1 �(q��)��(d��ng)�����bCANUSB����/������CAN�ӿڿ�ʹ��USBֱ�ӹ�늲��ṩ�����(q��)��(d��ng)���b�������b���E���£�
�c(di��n)���a(ch��n)Ʒ��P�ġ�\CANUSB\Drivers��Ŀ��µİ��b�����b�(q��)��(d��ng)��
��CANUSB����/������CAN�ӿڿ�ͨ�^(gu��)USB��|�B�ӵ�Ӌ(j��)��C(j��)����ʾ�l(f��)�F(xi��n)��Ӳ�����x���Ԅ�(d��ng)���bܛ�����ɡ�
4.2 CAN�ӿڿ�����(sh��)��(k��)�f(shu��)��4.2.1 ����(sh��)��(k��)��(sh��)��(j��)�Y(ji��)��(g��u)���x��1����ʼ��CAN��(sh��)��(j��)���
typedef struct _INIT_CONFIG
{ DWORD AccCode;//�(y��n)�մa
DWORD AccMask;//���δa
DWORD Reserved;//����
UCHAR Filter;//�V����ʽ
UCHAR Baudrate;//������
UCHAR Mode;//ģʽ
} VCI_INIT_CONFIG,*PVCI_INIT_CONFIG;
��2��CAN��Ϣ���Ĕ�(sh��)��(j��)���
typedef struct _VCI_CAN_OBJ
{ BYTE CANIndex;//���ܵĔ�(sh��)��(j��)����(l��i)���Ă�(g��)ͨ�� =0�r(sh��)CAN0ͨ�� =1�r(sh��)CAN1ͨ��
DWORD ID;//��(b��o)��ID
BYTE SendType;//�l(f��)�͎���ͣ�=0�r(sh��)�������l(f��)�ͣ�=1�r(sh��)���l(f��)���գ�ֻ���ڴˎ���l(f��)�͎��r(sh��)�����x��
BYTE ExternFlag;//�Ƿ��ǔU(ku��)չ��
BYTE RemoteFlag;//�Ƿ����h(yu��n)�̎�
BYTE DataLen; //��(sh��)��(j��)�L(zh��ng)�ȣ�<=8,��Data���L(zh��ng)��
BYTE Data[8]; //��(b��o)�ĵĔ�(sh��)��(j��)
}VCI_CAN_OBJ,*PVCI_CAN_OBJ;
4.2.2 �ӿں���(sh��)�f(shu��)����BOOL __stdcall VCI_OpenDevice(DWORD DevIndex);//���_�O(sh��)��
��BOOL __stdcall VCI_CloseDevice(DWORD DevIndex);//�P(gu��n)�]�O(sh��)��
��BOOL __stdcall VCI_InitCAN(DWORD DevIndex,DWORD CANIndex,PVCI_INIT_CONFIG InitConfig);//��ʼ��CAN
��BOOL __stdcall VCI_StartCAN(DWORD DevIndex ��DWORD CANIndex);//����(d��ng)CAN�O(sh��)��
��BOOL __stdcall VCI_ResetCAN(DWORD DevIndex ��DWORD CANIndex);//��(f��)λCAN�O(sh��)��
��BOOL __stdcall VCI_Transmit(DWORD DevIndex ��DWORD CANIndex, VCI_CAN_OBJ *SendData );//�l(f��)��һ����(sh��)��(j��)
��DWORD __stdcall VCI_Receive(DWORD DevIndex ��PVCI_CAN_OBJ pReceive , DWORD Len , DWORD WaitTime);//���Ք�(sh��)��(j��)
��BOOL __stdcall VCI_ReadDevSn(DWORD DevIndex, PCHAR DevSn);//�xȡ����̖(h��o)
����
DevIndex �O(sh��)������̖(h��o)����һ��(g��)�O(sh��)��r(sh��)����̖(h��o)��0���Ѓɂ�(g��)���Ԟ�0��1��
CANIndex �ڎ�·CAN��
InitConfig ��ʼ������(sh��)�Y(ji��)��(g��u)��
SendDataָ����Ϣ���Y(ji��)��(g��u)�w��
pReceive�Á�(l��i)���յĔ�(sh��)��(j��)���Y(ji��)��(g��u)�w��(sh��)�M����ָᘣ�
Len �xȡ���َ��Ĕ�(sh��)��(j��)��
WaitTime =0�r(sh��)��o(w��)�ȴ���>0�r(sh��)�ȴ����r(sh��)�r(sh��)�g���Ժ�����λ��
DevSn ����̖(h��o)��
����ֵ ��1��ʾ�����ɹ���0��ʾ����ʧ����
4.2.3 �ӿں���(sh��)��(k��)ʹ�÷������ȣ��ю�(k��)����(sh��)�ļ������ڹ���Ŀ��¡��������Ă�(g��)�ļ�CAN_TO_USB.h��CAN_TO_USB.lib��SiUSBXp.dll��CAN_TO_USB.dll��
VC�{(di��o)�Ä�(d��ng)�B(t��i)��(k��)�ķ�����
(1)��.cpp�а���CAN_TO_USB.h�^�ļ���
(2)�ڹ����ļ��м���CAN_TO_USB.lib�ļ���
4.2.4 �ӿں���(sh��)��(k��)ʹ������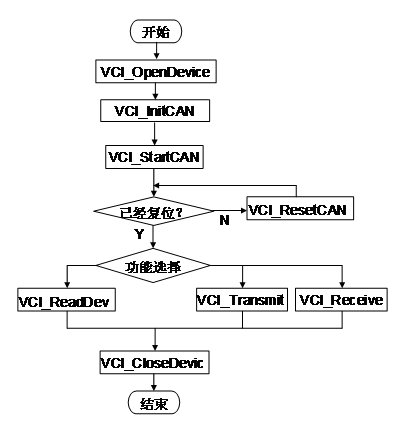
�D4.1 �ӿں���(sh��)��(k��)ʹ������
4.3 �����O(sh��)Ӌ(j��)CAN����ͨ��ϵ�y(t��ng)��λ�C(j��)ͨ��ܛ�����O(sh��)Ӌ(j��)Ŀ��(bi��o)�nj�(du��)CAN�������\(y��n)�Р�B(t��i)��ͨ�������M(j��n)����Ч�Ĝy(c��)ԇ��Ҫ�������_�R(sh��)�eCAN�O(sh��)�䲢���_CANͨ�����ɷ��bCAN��(b��o)���M(j��n)�аl(f��)�ͣ��ɽ���CAN��(sh��)��(j��)�������܌�(du��)��(sh��)��(j��)���M(j��n)�н������ڔ�(sh��)��(j��)�б����@ʾ��(b��o)�ĵ����P(gu��n)����(sh��)��Ϣ���磺��ID������ʽ������͡�DLCֵ�Լ�����(sh��)��(j��)�ȅ���(sh��)�����������^(gu��)�V���ܡ����w�����ׂ�(g��)����ģ�K���O(sh��)���B�ӡ��O(sh��)�䆢��(d��ng)���O(sh��)���(f��)λ�������b�c�l(f��)�͡��������c�����Լ�����@ʾ��
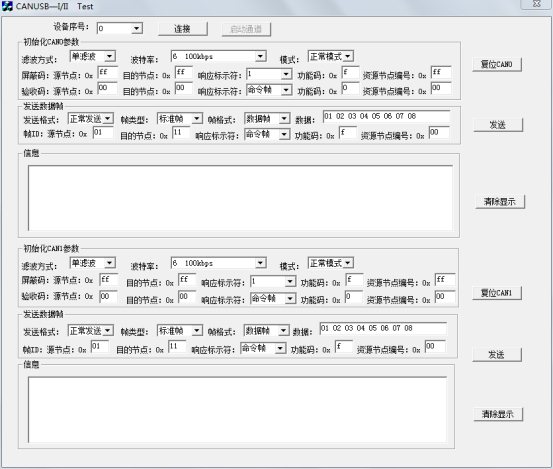
4.3.1 ���沼���O(sh��)Ӌ(j��)���_MFC App Wizard��exe����(chu��ng)��һ��(g��)���ڌ�(du��)Ԓ��đ�(y��ng)�ó����(xi��ng)Ŀ����Test�����_��(du��)Ԓ����ܛ������Ҫ���ÿؼ�������������(y��ng)�ؼ����O(sh��)�ÿؼ����ԣ����_���?q��)���������ϸ��ؼ����ӌ?du��)��(y��ng)�ijɆT׃�����O(sh��)Ӌ(j��)��ɺ�Ľ�����D3��ʾ����4.1�г���CAN0ͨ������(g��)�ؼ����Լ��ɆT׃�����O(sh��)�á�
�D4.2 CAN����ͨ��ϵ�y(t��ng)��λ�C(j��)ͨ��ܛ�������O(sh��)Ӌ(j��)
��4.1 CAN0ͨ���ؼ����Լ��ɆT׃�����O(sh��)��
| | | | |
| | | | |
| | | | |
| | | | |
| | | | |
| | | | |
| | | | |
| | | | |
| | | | |
| | | | |
| | | | |
| | | | |
| | | | |
| | | | |
| | | | |
| | ���δa��Դ��(ji��)�c(di��n)��0x | | |
| | | | |
| | | | |
| | | | |
| | | | |
| | | | |
| | | | |
| | | | |
| | �YԴ��(ji��)�c(di��n)��̖(h��o)��0x | | |
| | | | |
| | �(y��n)�մa��Դ��(ji��)�c(di��n)��0x | | |
| | | | |
| | | | |
| | | | |
| | | | |
| | | | |
| | | | |
| | | | |
| | �YԴ��(ji��)�c(di��n)��̖(h��o)��0x | | |
| | | | |
| | �l(f��)�͔�(sh��)��(j��)�� | | |
| | | | |
| | | | |
| | | | |
| | | | |
| | | | |
| IDC_COMBO_SENDFRAMEFORMAT0 | | | |
| | | | |
| | | | |
| | ��ID��Դ��(ji��)�c(di��n)��0x | | |
| | | | |
| | | | |
| | | | |
| | | | |
| | | | |
| | | | |
| | | | |
| | �YԴ��(ji��)�c(di��n)��̖(h��o)��0x | | |
| | | | |
| | | | |
| | | | |
CAN1ͨ������(g��)�ؼ����Լ��ɆT׃���O(sh��)��ͬCAN0ͨ�����Ͳ���٘����
4.3.2 ��(du��)Ԓ���ʼ����CTestDlg�OnInitDialog()����(sh��)�����Ӵ��a, �ڌ�(du��)Ԓ���ʼ���ĕr(sh��)���{(di��o)�ã�푑�(y��ng)WM_INITDIALOG��Ϣ��������ɳ������Ą�(chu��ng)��֮����~��ij�ʼ�����������~��ij�ʼ�����a���@��(g��)����(sh��)�Ќ�(sh��)�F(xi��n)��
��1���M�Ͽ��ʼ��
�M�Ͽ���O(sh��)���Կؼ�IDC_COMBO_FILTERTYPE0������Ҫ��ؼ�IDC_COMBO_FILTERTYPE0�������@ʾ�ɷN�V����ʽ��?ji��n)ΞV�����p�V����Ĭ�J(r��n)�@ʾ�ΞV��������OnInitDialog()����(sh��)���������´��a��
//�V����ʽ������
m_ComboFilterType0.AddString("�ΞV��");
m_ComboFilterType0.AddString("�p�V��");
//�O(sh��)�õ�0�Ѓ�(n��i)�ݞ��@ʾ�ă�(n��i)�ݣ����V����ʽĬ�J(r��n)��ΞV��
m_ComboFilterType0.SetCurSel(0);
�����M�Ͽ�����ͬ��ʽ��Ҫ���O(sh��)�á�
��2�������ʼ��
������O(sh��)���Կؼ�IDC_EDIT_MASK0�������ؼ�IDC_EDIT_MASK0�@ʾ�������δa��Դ��(ji��)�c(di��n)��Ĭ�J(r��n)�@ʾ��ff��������OnInitDialog()����(sh��)���������´��a��
m_EditMask0="ff";
������������ͬ��ʽ��Ҫ���O(sh��)�á�
��3��Ҫ��(d��ng)�r(sh��)CANĬ�J(r��n)δ�B�ӣ�δ����(d��ng)������OnInitDialog()����(sh��)���������´��a��
bConnectCAN=FALSE; //����(d��ng)�r(sh��)CANĬ�J(r��n)δ�B��
bStartCAN=FALSE; //����(d��ng)�r(sh��)CANĬ�J(r��n)�P(gu��n)�]
��4��Ҫ���O(sh��)��δ�B�ӕr(sh��)���܆���(d��ng)�O(sh��)�䣬Ĭ�J(r��n)���Æ���(d��ng)ͨ�����o������OnInitDialog()����(sh��)���������´��a��
GetDlgItem(IDC_BUTTON_CONNECT1)->EnableWindow(FALSE);
��5������(du��)Ԓ���(n��i)�ݣ���׃���еĔ�(sh��)��(j��)ݔ�����ؼ�������OnInitDialog()����(sh��)���������´��a��
UpdateData(false);
4.4 ܛ�����܌�(sh��)�F(xi��n)4.4.1 �O(sh��)���B��Ҫ���c(di��n)�����B�ӡ����o����λ�C(j��)ͨ��ܛ���cCANUSB����/������CAN�ӿڿ��B�ӣ������@ʾ�B�ӳɹ��c�����B��ʧ��������������_�O(sh��)��ʧ�����������B�ӳɹ����քe���б���IDC_LIST_INFO0��IDC_LIST_INFO1�@ʾ��CAN0�B�ӳɹ�����CAN1�B�ӳɹ�����
��TestDlg.h�^�ļ�������׃����
public:
int m_devnum; //�O(sh��)����̖(h��o)
int m_cannum; //canͨ����̖(h��o)
void CAN0ShowInfo(CString str, int code);//CAN0�����@ʾ���ƺ���(sh��)
�p�����B�ӡ����o��ϵ�y(t��ng)�Ԅ�(d��ng)������Ϣ푑�(y��ng)����(sh��)OnButtonConnect0()�����Ӵ��a����(sh��)�F(xi��n)�Ñ�Γ����B�ӡ����o������O(sh��)����B�ӹ��ܡ�
���x��ʼ��CAN�Ĕ�(sh��)��(j��)��͵ĽY(ji��)��(g��u)�w��VCI_INIT_CONFIG init_config;
���CAN�ѽ�(j��ng)���_���{(di��o)��VCI_CloseDevice(m_devnum)����(sh��)�P(gu��n)�]�O(sh��)�䡣�{(di��o)��GetCurSel()����(sh��)�@ȡ�O(sh��)����̖(h��o)��devnum=m_ComboDevindex.GetCurSel();
���(VCI_OpenDevice(devnum))==0���t�O(sh��)����_ʧ�����{(di��o)��MessageBox����(sh��)������Ϣ���桰���_�O(sh��)��ʧ����������tCAN0��CAN1�B�ӳɹ����քe���б���IDC_LIST_INFO0��IDC_LIST_INFO1�@ʾ��
�˕r(sh��)�����oIDC_BUTTON_CONNECT0�Ę�(bi��o)�}���B�ӡ�׃?y��u)顰���_����������(d��ng)ͨ�������o׃?y��u)���Ч�����������´��a��
GetDlgItem(IDC_BUTTON_CONNECT0)->SetWindowText("���_");
GetDlgItem(IDC_BUTTON_CONNECT1)->EnableWindow(TRUE);
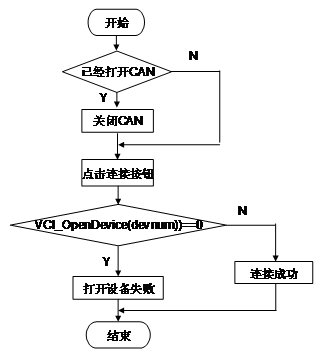
�D4.3 �O(sh��)���B�����̈D
4.4.2 �O(sh��)�䆢��(d��ng)Ҫ���c(di��n)��������(d��ng)ͨ�������o��CAN0ͨ����CAN1ͨ��ͬ�r(sh��)����(d��ng)�����@ʾ����(d��ng)�ɹ��c����(d��ng)ͨ��ʧ����������Ϣ�l(f��)�����棬��(d��ng)ͨ���ɹ����քe���б���IDC_LIST_INFO0��IDC_LIST_INFO1�@ʾ��CAN0����(d��ng)�ɹ�����CAN1����(d��ng)�ɹ�����
�p��������(d��ng)ͨ�������o��ϵ�y(t��ng)�Ԅ�(d��ng)������Ϣ푑�(y��ng)����(sh��)OnButtonConnect1()�����Ӵ��a����(sh��)�F(xi��n)�Ñ�Γ�������(d��ng)ͨ�������o�����ͨ��CAN0��CAN1�Ć���(d��ng)���ܡ�
���VCI_InitCAN(m_devnum,0,&init_config)!=true���tͨ��CAN0��ʼ��ʧ�������VCI_InitCAN(m_devnum,1,&init_config)!=true���tͨ��CAN1��ʼ��ʧ�����������{(di��o)��VCI_CloseDevice(m_devnum)����(sh��)���P(gu��n)�]�O(sh��)��
���VCI_StartCAN(m_devnum,0)!=true���tͨ��CAN0����(d��ng)ʧ�������VCI_StartCAN(m_devnum,1)!=true���tͨ��CAN1����(d��ng)ʧ�����������{(di��o)��VCI_CloseDevice(m_devnum)����(sh��)���P(gu��n)�]�O(sh��)�䡣���ͨ��CAN0��CAN1����(d��ng)�ɹ����t���Æ���(d��ng)ͨ�����o��
GetDlgItem(IDC_BUTTON_CONNECT1)->EnableWindow(FALSE);

�D4.4 �O(sh��)�䆢��(d��ng)���̈D
4.4.3 �O(sh��)���(f��)λҪ���c(di��n)������(f��)λCAN0�����o����(f��)λͨ��CAN0���c(di��n)������(f��)λCAN1�����o����(f��)λͨ��CAN1���ɹ��t�քe���б���IDC_LIST_INFO0��IDC_LIST_INFO1�@ʾ����(f��)λ�ɹ�����ʧ���t�б���IDC_LIST_INFO0��IDC_LIST_INFO1�@ʾ����(f��)λʧ������
CAN0ͨ����
�p������(f��)λCAN0�����o��ϵ�y(t��ng)�Ԅ�(d��ng)������Ϣ푑�(y��ng)����(sh��)OnButtonResetcan0()�����Ӵ��a����(sh��)�F(xi��n)�Ñ�Γ�����(f��)λCAN0�����o�����ͨ��CAN0�ď�(f��)λ���ܡ�
���VCI_ResetCAN(m_devnum,0)==1���t��(f��)λ�ɹ�����t����(f��)λʧ�������Y(ji��)���@ʾ���б���IDC_LIST_INFO0��(n��i)��
CAN1ͨ���ď�(f��)λ�����O(sh��)����CAN0ͨ�����ڴ˾Ͳ���٘����
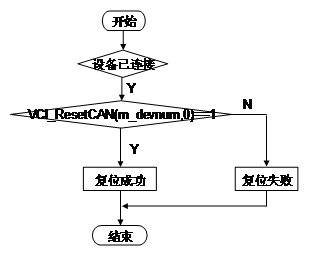
�D4.5 CAN0ͨ����(f��)λ���̈D
4.4.4 �����b�c�l(f��)����1�������b
��(b��o)�Ę�(bi��o)�R(sh��)��ָ���˔�(sh��)��(j��)ͨӍ�е�Դ��(ji��)�c(di��n) MACID ��Ŀ��(bi��o)��(ji��)�c(di��n)MACID����ָʾ�ˈ�(b��o)�ĵĹ����Լ���Ҫ�L��(w��n)���YԴ��(ji��)�c(di��n)����(b��o)�Ę�(bi��o)�R(sh��)�����֞�SrcMACID (Դ��(ji��)�c(di��n)��ַ)��DestMACID��Ŀ��(bi��o)��(ji��)�c(di��n)��ַ����ACK λ��FuncID�����ܴa����Source ID���YԴ��(ji��)�c(di��n)��ַ��5 ��(g��)���֣����4.2ʾ��
��4.2 iCAN��(bi��o)�R(sh��)������
| | | | | | |
| SrcMACID ��Դ��(ji��)�c(di��n)��ַ�� | | DestMACID ��Ŀ��(bi��o)��(ji��)�c(di��n)��ַ�� |
| | | |
| | SourceID���YԴ��(ji��)�c(di��n)��ַ�� | |
SrcMACID (Դ��(ji��)�c(di��n)��ַ)���l(f��)��iCAN ��(b��o)�ĵĹ�(ji��)�c(di��n)��ַ��ռ�Ø�(bi��o)�R(sh��)��λID28~ID21��SrcMACID �ĸ�2 λ�̶���0����(sh��)ֵ������0x00-0x3F��
DestMACID (Ŀ��(bi��o)��(ji��)�c(di��n)��ַ)������iCAN ��(b��o)�Ĺ�(ji��)�c(di��n)��ַ��ռ�Ø�(bi��o)�R(sh��)��λID20~ID13��DestMACID �ĸ�2 λ�̶���0����(sh��)ֵ������0x00-0x3F����(d��ng)DestMACID ��ֵ��0xFF�r(sh��)����ʾ���ΰl(f��)�͵Ď��ǏV������
ACK������(y��ng)��(bi��o)�R(sh��)����������1 λ��ռ�Ø�(bi��o)�R(sh��)��λID12��ԓλ���څ^(q��)�֎���͞����߀��푑�(y��ng)�������f(shu��)���Ƿ���Ҫ��(y��ng)�𱾎���
��4.3����(y��ng)��(bi��o)־λ
| |
| ���������������Ҫ��(y��ng)�𣬵���(du��)�ڏV��������ֵ�o(w��)���x |
| ����푑�(y��ng)������������Ҫ��(y��ng)�𣻻���Ҫ��(y��ng)����������V������ |
FunctionID�����ܴa��������4 λ��ռ�Ø�(bi��o)�R(sh��)��λID11~ID8�����ܴa����ָʾiCAN ��(b��o)����Ҫ��(sh��)�F(xi��n)�Ĺ��ܣ�����?q��ng)?b��o)�ĵĹ�(ji��)�c(di��n)����(j��)��(b��o)���еĹ��ܴa�M(j��n)������(y��ng)��̎����
Source ID���YԴ��(ji��)�c(di��n)��ַ��������ָʾ��Ҫ�L��(w��n)�ď�վ��(n��i)���YԴ����ʼ��ַ������8 λ��ռ�Ø�(bi��o)�R(sh��)��λID7~ID0��
�քeݔ��Դ��(ji��)�c(di��n)��Ŀ�Ĺ�(ji��)�c(di��n)��푑�(y��ng)��(bi��o)ʾ�������ܴa���YԴ��(ji��)�c(di��n)��ַ��Ҫ��(du��)��(b��o)���M(j��n)�з��b��l(f��)�͡�
��Դ��(ji��)�c(di��n)������ռ�Ø�(bi��o)�R(sh��)��λID28~ID21����̎���������£�
memcpy(&szFrameID[0],(LPCTSTR)m_EditSendFrmID0,m_EditSendFrmID0.GetLength());//��ؐm_EditSendFrmID0��ָ��(n��i)���(n��i)�ݵ�&szFrameID[0]��ָ�ă�(n��i)���ַ��
CAN0strtodata((unsigned char*)szFrameID,&FrameID[0],1,0);//�ַ����D(zhu��n)�Q�锵(sh��)��(j��)��
ExtendID |= (FrameID[0]&0x3f)<<21;//����21λ
��������ͬ��ʽ̎������(b��o)�ľͷ��b��FrameID[0]�С�
��2���l(f��)��
Ҫ���c(di��n)�����l(f��)�͡����o���l(f��)�͔�(sh��)��(j��)���Y(ji��)���քe�@ʾ���б���IDC_LIST_INFO0��IDC_LIST_INFO1��(n��i)��
CAN0ͨ����
�p�����l(f��)�͡����o��ϵ�y(t��ng)�Ԅ�(d��ng)������Ϣ푑�(y��ng)����(sh��)OnButtonSend0()�����Ӵ��a����(sh��)�F(xi��n)�Ñ�Γ����l(f��)�͡����o����ɰl(f��)��ͨ��CAN0��(sh��)��(j��)�Ĺ��ܡ�
���bStartCAN==FALSE���tͨ��δ����(d��ng)�����ܰl(f��)�͔�(sh��)��(j��)��������Ϣ���桰Ո(q��ng)����(d��ng)�O(sh��)�䣡����
�{(di��o)��VCI_Transmit(m_devnum,0,&frameinfo)����(sh��)�Д�l(f��)�͠�B(t��i)��������棬�t�l(f��)�ͳɹ������б���IDC_LIST_INFO0��(n��i)�@ʾ���b�õĎ�ID�͡��O(sh��)��0 ͨ��CAN0 �l(f��)�ͳɹ�������t�@ʾ���O(sh��)��0 ͨ��CAN0 �l(f��)��ʧ������
CAN1ͨ���İl(f��)�����O(sh��)��ͬCAN0ͨ�����ڴ˾Ͳ���٘����
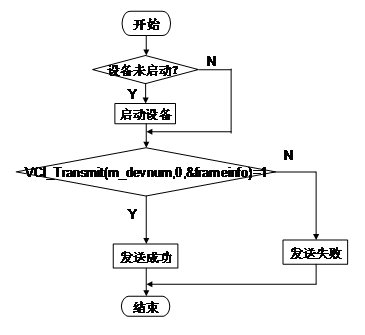
�D4.6 CAN0ͨ���l(f��)������
4.4.5 �������c������1������
Ҫ��CAN0��CAN1ͨ���ܽ��յ���(du��)��ͨ�����Լ��l(f��)���Ĕ�(sh��)��(j��)��
CAN0ͨ����
��TestDlg.h�^�ļ��ﶨ�xCAN0���վ��̈�(zh��)�к���(sh��)��
static UINT CAN0ReceiveThread(void *param);
��TestDlg.cpp��(n��i)����CAN0���վ��̈�(zh��)�к���(sh��)
UINT CTestDlg::CAN0ReceiveThread(void *param){}�����������Ӵ��a����ɔ�(sh��)��(j��)���չ��ܡ�
���xCAN��Ϣ����(sh��)��(j��)��͵ĽY(ji��)��(g��u)�w��VCI_CAN_OBJ frameinfo[50]��
�@ȡ����̖(h��o)��bSn=VCI_ReadDevSn(dlg->m_devnum,DevSn)��
�@ȡ��(sh��)��(j��)�L(zh��ng)�ȣ�Len=VCI_Receive(dlg->m_devnum,frameinfo,50,200)��
���Len<=0���t�]�н��յ���(sh��)��(j��)����t�����յ���(sh��)��(j��)��
���frameinfo.CANIndex==0���tCAN0ͨ�����Ք�(sh��)��(j��)����t��CAN1ͨ�����Ք�(sh��)��(j��)�����frameinfo.ExternFlag==0���t����͞��(bi��o)��(zh��n)������t����U(ku��)չ�������frameinfo.RemoteFlag==0���t����ʽ�锵(sh��)��(j��)������t�����h(yu��n)�̎���

�D4.7 CAN0���Ք�(sh��)��(j��)���̈D
��2��������
- Դ��(ji��)�c(di��n)�����b��Ď�ID����21λݔ���ļ���Դ��(ji��)�c(di��n)���������£�
tmpstr.Format("Դ��(ji��)�c(di��n):%02x ",(frameinfo.ID>>21)&0x3f);
- Ŀ�Ĺ�(ji��)�c(di��n)�����b��Ď�ID����13λݔ���ļ���Ŀ�Ĺ�(ji��)�c(di��n)���������£�
tmpstr.Format(" Ŀ�Ĺ�(ji��)�c(di��n):%02x ",(frameinfo.ID>>13)&0x3f);
- 푑�(y��ng)��(bi��o)ʾ�������b��Ď�ID����12λݔ���ļ���푑�(y��ng)��(bi��o)ʾ���������1�t��푑�(y��ng)������0�t��������������£�
if((frameinfo.ID>>12)&0x01)
str+=" 푑�(y��ng)��";
else
str+=" ���";
- ���ܴa�����b��Ď�ID����8λݔ���ļ��鹦�ܴa���������£�
tmpstr.Format(" function ID:%02x ",(frameinfo.ID>>8)&0x0f);
- �YԴ��(ji��)�c(di��n)��̖(h��o)�����b��Ď�ID���8λ���鹦�ܴa���������£�
tmpstr.Format(" source ID:%02x ",frameinfo.ID&0xff);
�D4.8 ���������D
4.4.6 ����@ʾҪ���c(di��n)��������@ʾ�����o���б���IDC_LIST_INFO0��IDC_LIST_INFO1��(n��i)�ă�(n��i)��ȫ�������
CAN0ͨ����
�p��������@ʾ�����o��ϵ�y(t��ng)�Ԅ�(d��ng)������Ϣ푑�(y��ng)����(sh��)OnButton Clear0()�����Ӵ��a����(sh��)�F(xi��n)�Ñ�Γ�������@ʾ�����o������б���IDC_LIST_INFO0��(n��i)�ă�(n��i)��ȫ��������ܡ�
�������´��a�����CAN0�б��@ʾ�(xi��ng)��
m_ListInfo0.ResetContent();
4.5 ����С�Y(ji��)���¾��w��B��CANͨ��ܛ�����O(sh��)Ӌ(j��)����һ���ֽ�B��CANUSB����/������CAN�ӿڿ����(q��)��(d��ng)���b�������ڶ����ֽ�B��CAN�ӿڿ�����(sh��)��(k��)���������ֽ�B��ܛ���Ľ����O(sh��)Ӌ(j��)����������IJ��֡��ؼ����Լ��ɆT׃�����O(sh��)�ã��͌�(du��)Ԓ��ij�ʼ�������IJ���Ԕ��(x��)��B��ܛ�����ܵČ�(sh��)�F(xi��n)�������O(sh��)���B�ӡ�����(d��ng)����(f��)λ�������b�c�l(f��)�͡��������c����������@ʾ����(g��)���ֹ��ܵČ�(sh��)�F(xi��n)������
5 �y(c��)ԇ���l(f��)��5.1 ܛ�����ܜy(c��)ԇ��CANUSB����/������CAN�ӿڿ��B��PC��USB�ӿڲۣ��\(y��n)����λ�C(j��)ܛ�����y(c��)ԇ���ܡ�
5.1.1 �������ܜy(c��)ԇ��(zh��)�г�����Dݔ�딵(sh��)��(j��)���y(c��)ԇ���(xi��ng)�����Ƿ��������\(y��n)�С�

�D5.1 ����ܛ�����ܜy(c��)ԇ
��(j��ng)�y(c��)ԇ�����(xi��ng)�����\(y��n)��������
5.1.2 �Ƿ�ݔ��������(du��)�ھ�����ݔ��Ƿ��ַ����t������Ϣ�Ƿ��ַ���Ո(q��ng)����ݔ�룡���ľ��棬���D��ʾ��
�D5.2 �Ƿ�ݔ�뾯��
5.2 ����l(f��)��һ��(g��)�������.exe���⣬߀��Ҫ�õ��ܶ������ⲿ�YԴ���@�ӳ���ʹ������(l��i)�ܲ����㣬���������nj��@Щ�����YԴ�ŵ�һ��(g��)���b�����У��@��ֻҪ���d���\(y��n)���@��(g��)���b���Ϳ������b����ጷ�Ŀ��(bi��o)���������@Щ�YԴ������ʹ�á�
Inno Setup��һ��(g��)���M(f��i)�İ��b����ܛ����С�ɡ���(ji��n)�㡢���������������c(di��n)����Inno Setup��(du��)�ѽ�(j��ng)�����õĹ����M(j��n)�д�����E���£�
- ���ѽ�(j��ng)�{(di��o)ԇ��ɵĹ��̣����ɰl(f��)�а棨release����
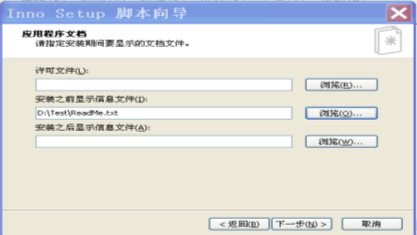
- ���b��Inno Setup Compiler�h���棬����(d��ng)ܛ����ʹ���_���O(sh��)Ӌ(j��)��?q��)?/font>��(chu��ng)��һ��(g��)�����_���ļ�����ɰ��b������������^(gu��)�����D��ʾ��

�D5.3 ��(y��ng)�ó�����Ϣ
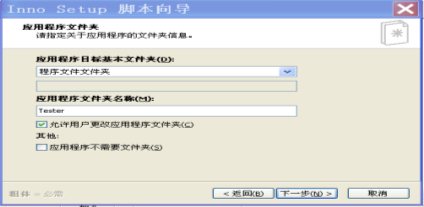
�D5.4 ��(y��ng)�ó����ļ��A
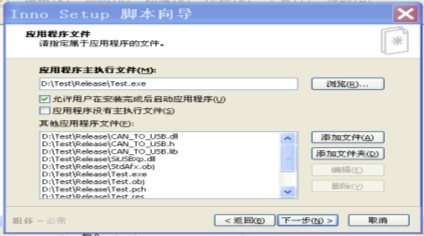
�D5.5 ��(y��ng)�ó����ļ�
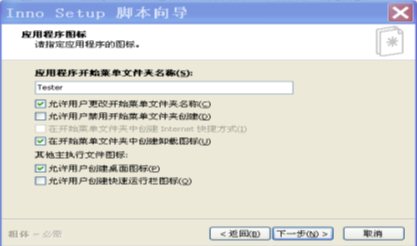
�D5.6 ��(y��ng)��D��(bi��o)
�D5.7 ��(y��ng)�ó����ęn

�D5.8 ���b�Z(y��)��
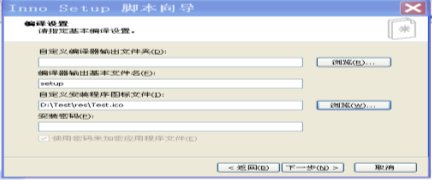
�D5.9 ���g�O(sh��)��

�D5.10 Inno Setup �A(y��)̎����

�D5.11 �����?q��)?/font>
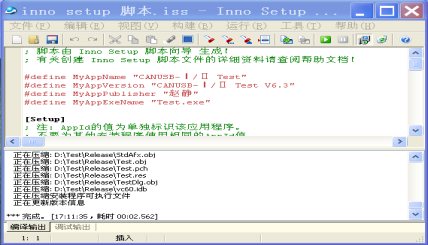
�D5.12 ���g�_��
- �p��Setup�D��(bi��o)���M(j��n)�ЇLԇ���b�����b�ɹ������_ʼ�ˆΙ����F(xi��n)�\(y��n)�к�ж�d��ݷ�ʽ�������\(y��n)��ܛ����ж�dܛ����
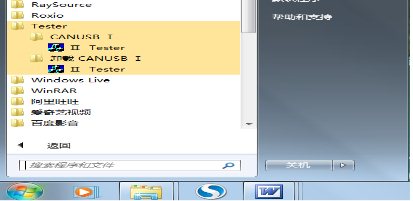
�D5.13 ���b�ɹ�Ч���D
5.3 ����С�Y(ji��)����(du��)�ѽ�(j��ng)������ɵij����M(j��n)�й��ܜy(c��)ԇ����Ҫ�y(c��)ԇ�B���O(sh��)�䡢����(d��ng)ͨ������(f��)λ���l(f��)�ͺͽ��չ��ܣ����܌�(sh��)�F(xi��n)���ķ��b�ͽ������y(c��)ԇ�o(w��)�`���M(j��n)�г���l(f��)��������ʹ�á�
�Y(ji��)Փ
���I(y��)�O(sh��)Ӌ(j��)�DZ��ƌW(xu��)��(x��)�A��һ�ηdz��y�õ���Փ�c��(sh��)�H��Y(ji��)�ϵęC(j��)��(hu��)��ͨ�^(gu��)�@��CAN����ͨ��ϵ�y(t��ng)��λ�C(j��)ͨ��ܛ�����O(sh��)Ӌ(j��)���ҏČ�(du��)CAN�������P(gu��n)���g(sh��)һ�o(w��)��֪������һ�c(di��n)�˽⣬얹�������(j��ng)�W(xu��)�^(gu��)��֪�R(sh��)��呟�����Փ�c��(sh��)�H�Y(ji��)�Ͻ�Q��(sh��)�H��(w��n)�}��������ͬ�r(sh��)Ҳ������Ҳ���īI(xi��n)�Y�ϵ�������ʹ�Լ�����ȫ��λ����ߣ��S�����Լ��Ľ�(j��ng)�(y��n)��
������Ҫ��������µ��о���
1����(du��)CAN�������о��������l(f��)չ�F(xi��n)����n�}���о�Ŀ�ĺ����x�M(j��n)����Փ����
2����(ji��n)�����CAN2.0�f(xi��)�h��CAN������SJA1000��
3����B�˱��n�}���_�l(f��)�h(hu��n)����CANUSB��/��ֻ��CAN�ӿڿ���
4������VC++�O(sh��)Ӌ(j��)CANͨ��ܛ��������(sh��)�F(xi��n)�����¹��ܣ�
�����_�R(sh��)�eCAN�O(sh��)�䲢���_CANͨ����
�ڿɷ��bCAN��(b��o)���M(j��n)�аl(f��)�ͣ�
�ۿɽ���CAN��(sh��)��(j��)�������܌�(du��)���յĔ�(sh��)��(j��)���M(j��n)�н������ڔ�(sh��)��(j��)�б����@ʾ��(b��o)�ĵ����P(gu��n)����(sh��)��Ϣ���磺��ID������ʽ������͡�DLCֵ�Լ�����(sh��)��(j��)�ȅ���(sh��)����
�ܾ����^(gu��)�V���ܣ��ɲ��@ʾָ���ąf(xi��)�h����
5����(du��)ܛ�������M(j��n)�Мy(c��)ԇ�����l(f��)��ܛ����
��������ˮƽ���ޣ����I(y��)�O(sh��)Ӌ(j��)�ض�߀�кܶ���Ƿȱ���]�ĵط���Ҳ�е�����֪�R(sh��)��ؚ����ϣ�����պ��Ŭ�����܉�������ơ�
���x
���˵Į��I(y��)�O(sh��)Ӌ(j��)һֱ�������G�ώ���Ϥ��ָ��(d��o)���M(j��n)�еġ����ώ��ΌW(xu��)��(y��n)֔(j��n)��Ҫ���(y��n)�W(xu��)�R(sh��)�Y���������H�С����n�}���x���������Ĵ_������(sh��)�H���O(sh��)Ӌ(j��)��Փ�ĵČ��������ώ����o���˟o(w��)�������P(gu��n)�ѡ�������(g��)���I(y��)�O(sh��)Ӌ(j��)�^(gu��)���У����G�ώ��r(sh��)�r(sh��)�Ըߘ�(bi��o)��(zh��n)Ҫ��(y��n)���ŕr(sh��)�g��������ָ������ʹ�����ߺܶ���·����������(w��n)�}�r(sh��)�����G�ώ�Ҳ����ָ��(d��o)��ѭѭ���T�����܉�(d��)��˼�������������ҵĮ��I(y��)�O(sh��)Ӌ(j��)���ڴ˱�ʾ�\(ch��ng)���ĸ��x�����Եľ��⡣
���⣬��߀Ҫ���x�S��ͬ�W(xu��)������(g��)�^(gu��)���еĎ�������ϡ�
 CAN����ͨ��ϵ�y(t��ng)��λ�C(j��)ͨ��ܛ�����O(sh��)Ӌ(j��).doc
(842 KB, ���d��(sh��): 113)
CAN����ͨ��ϵ�y(t��ng)��λ�C(j��)ͨ��ܛ�����O(sh��)Ӌ(j��).doc
(842 KB, ���d��(sh��): 113)