實習名稱 | 電子工藝實習 | 學 院 | 信息與通信工程學院 | ||
學生姓名 | 班 級 | 學 號 | |||
實習時間 | 2018 | 實習地點 | 學九 | ||
實 習 內 容 |
| ||||
學生 實習 總結 (附頁,不少于2000字) | 見附頁 | ||||
實 習 成 績 評 定 | 遵照實習大綱并根據以下三方面按百分制綜合評定成績: 1、思想品德、實習態度、實習紀律等 2、技術業務考核、筆試、口試、實際操作等 3、實習報告、分析問題、解決問題的能力 實習評語: 實習成績: 指導教師簽名: 實習單位公章 年 月 日 | ||||
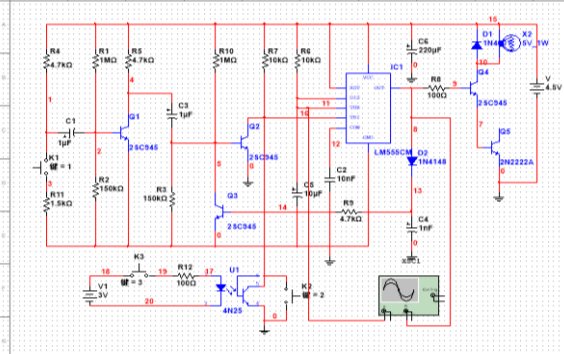

當麥克風沒有接收到聲音時,呈高阻抗,使得Q1處于截止區,處于復位狀態,3腳輸出低電平,則電機不工作,機器狗保持靜止狀態。
當麥克風接收到聲音時,內部會產生變化而導致其電阻變小。此時聲音信號產生的脈沖信號通過C1直接耦合到Q1的基極上使之導通,信號經過共射后被反向放大。再通過C3直接耦合到Q2的基極,和經過R10的電壓疊加變成高電平,促使Q2導通,使得555芯片與其他元件構成的單穩態電路的2腳從高電平跳變為低電平,這使得555芯片被觸發翻轉,3腳輸出高電平,使D1導通,此時電動機開始工作。也就是說機器狗開始行走并發出叫聲,持續時間與觸發器延時時間相同。
當555芯片的3腳輸出高電平時,電機被帶動工作,D2導通,電壓通過R10直接加到Q3的基極上,Q3導通,集電極產生負電壓使得Q2反偏,又重新使得555芯片的2管腳回到高電平,555芯片在一個單位延遲時間后不再被觸發。
4.2 元器件的識別與測試元器件名稱 | 器件識別 | 器件說明與測試 |
電阻 |  | 本次所用電阻為五色環電阻,按照黑棕紅橙黃綠藍紫灰白從0~9的順序,前三 位為有效阻值,第四位為有效位數,第五位為允許偏差(皆為1%)此規則讀數識別 |
二極管 |  | 正向導通,反向截止。有白色色環的引腳為負極 |
三極管 | 注意極性,判斷NPN和PNP,注意引腳封裝。以及判斷8050、9014(D) | |
電解電容 | 判斷極性是否接錯 | |
光敏三極管 | 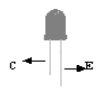 | 兩個PN結組成,但基極沒有引線;當遇到光照時,C、E兩極導通,測量時紅表筆接C |
干簧管 | 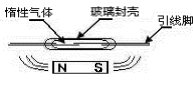 | 由一對磁性材料制造的彈性舌簧組成,密封于玻璃管中;舌簧磁化,當磁場作用時舌簧被吸引力作用接觸導通,即電路閉合 |
麥克風 |  | 注意接外殼的引腳為負極性,用屏蔽線能有效減小噪聲 |
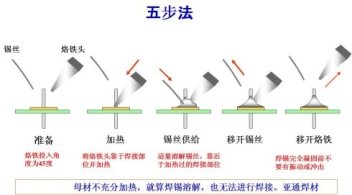
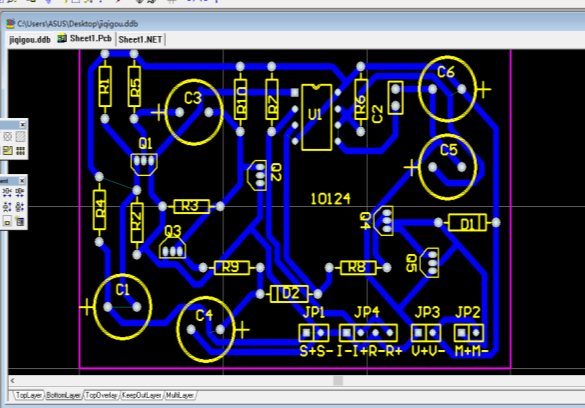
首先,按照說明和印制板上的標識,焊接各個器件到印制板上。
然后,將焊接好基本器件的印制板與機器狗內部進行連接。符號說明如下:
名 稱 | 代表字符 | 名 稱 | 代表字符 | 名 稱 | 代表字符 |
電動機 | M | 麥克風(聲控) | S | 紅外接收(光控) | I |
電 源 | V | 干簧管(磁控) | R |
①電動機:打開機殼,電動機(黑色)已固定在機殼底部。電動機負極與電池負極有一根連線,改裝電路,將連在電池負極的一端焊下來,改接至線路板的“電動機-”(M-),由電動機正端引一根線J1到印制板上的“電動機+”(M+)。音樂芯片連接在電池負極的那一端改接至電動機的負極,使其在狗行走的時候才發出叫聲。
②電源:由電池負極引一根線J2到印制板上的“電源-”(V-)。“電源+”(V+)與“電機+”(M+)相連,不用單獨再接。
③磁控:由印制板上的“磁控+、-”(R+、R-)引兩根線J3、J4,分別搭焊在干簧管(磁敏傳感器)兩腿,放在狗后部,應貼緊機殼,便于控制。干簧管沒有極性。
④紅外接收管(光控):由印制板上的“光控+、-”(I+、I-)引兩根線J5、J6搭焊到紅外接收管的兩個管腿上,其中一條管腿套上熱縮管,以免短路,導致打開開關后狗一直走個不停。用電烙鐵在狗的前胸燙出一個圓形的孔,將紅外接收管套入該孔中。應注意的是:紅外接收管的長腿應接在“I-”上。
⑤聲控部分:屏蔽線兩頭脫線,一端分正負(中間為正,外圍為負)焊到印制板上的S+、S-;另一端分別貼焊在麥克風(聲敏傳感器)的兩個焊點上,但要注意極性,且麥克易損壞,焊接時間不要過長。焊接完后麥克安在狗的尾部。
⑥通電前檢查元器件焊接及連線是否有誤,以免造成短路,燒毀電機發生危險。尤其注意在裝入電池前測量“電源-”(V-)。“電源+”間是否短路,并注意電池極性。
4.4 機器狗的組裝4、檢查元器件焊接及連線是否有誤,以免造成短路。檢測通過之后,方可進行封裝。
 機器狗實驗報告.doc
(554.84 KB, 下載次數: 12)
機器狗實驗報告.doc
(554.84 KB, 下載次數: 12)
| 歡迎光臨 (http://www.zg4o1577.cn/bbs/) | Powered by Discuz! X3.1 |