采用液晶顯示屏LCD1602進行顯示。液晶顯示屏具有顯示功能強大,可以自己任意設置顯示內容,而且比較美觀,整體控制也比較容易。
方案比較:考慮到系統的顯示功能和控制方式本設計采用了LCD1602液晶作為顯示裝置。
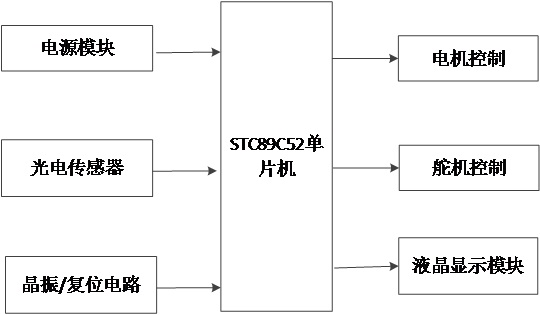
2.3 系統總體方案本流水線產品分類系統通過光電傳感器實現對產品的計數及產品的大小的分類,其中對計數傳感器與分類傳感器的感應距離通過調節完成,最后實現計數光電傳感器能對大、小產品同時計數,分類光電傳感器能夠實現對大產品、小產品的不同感應,單片機通過綜合判斷兩個傳感器的感應情況驅動舵機進行產品分類,并將統計數據顯示于液晶屏上。另外需有傳送帶驅動電機,帶動傳送帶運動,系統框圖如圖所示。
電機驅動控制電路主要通過單片機控制電機驅動芯片L298N,然后再由電機驅動芯片分別電機工作帶動傳送帶工作,保證其正常運轉,然后其原理如圖3.5所示。
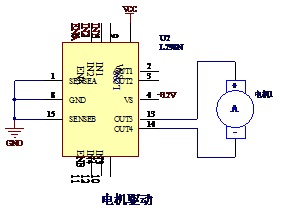
圖3.6 電機驅動原理圖
3.4 紅外檢測電路設計3.4.1 紅外檢測模塊該紅外避障傳感器是基于紅外對管模塊的紅外避障傳感器。該傳感器模塊對環境光線適應能力強,其具有一對紅外線發射與接收管,發射管發射出一定頻率的紅外線,當檢測方向遇到障礙物(反射面)時,紅外線反射回來被接收管接收,經過比較器電路處理之后,綠色指示燈會亮起,同時信號輸出接口輸出數字信號(一個低電平信號),可通過電位器旋鈕調節檢測距離,有效距離范圍 2~30cm,工作電壓為3.3V-5V。該傳感器的探測距離可以通過電位器調節、具有干擾小、便于裝配、使用方便等特點,可以廣泛應用于機器人避障、避障小車、流水線計數及黑白線循跡等眾多場合。
一、模塊參數說明
(1)當模塊檢測到前方障礙物信號時,電路板上綠色指示燈點亮電平,同時OUT端口持續輸出低電平信號,該模塊檢測距離2~30cm,檢測角度35°,檢測距離可以通過電位器進行調節,順時針調電位器,檢測距離增加;逆時針調電位器,檢測距離減少。
(2)傳感器主動紅外線反射探測,因此目標的反射率和形狀是探測距離的關鍵。其中黑色探測距離最小,白色最大,小面積物體距離小,大面積距離大。
(3)傳感器模塊輸出端口OUT可直接與單片機IO口連接即可,也可以直接驅動一個5V繼電器;連接方式:VCC-VCC;GND-GND;OUT-IO。
(4)可采用3-5V直流電源對模塊進行供電。當電源接通時,紅色電源指示燈點亮。
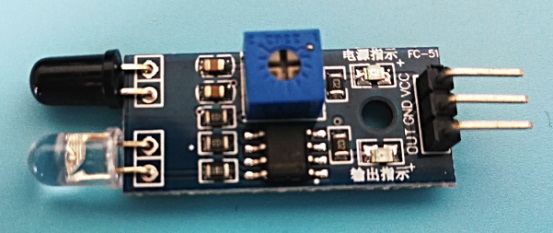
圖3.7 紅外避障模塊實物圖
3.4.2 紅外檢測原理圖為滿足本流水線分類系統需求,本系統分別在工設置兩個紅檢測模塊,啟動一個用于計數,一個用于分類,原理圖如圖3.8所示。
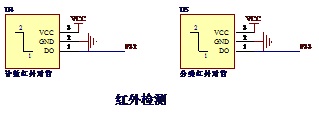
圖3.8 紅外檢測原理圖
本系統供電除分為12V供電和5V供電,系統輸入220V市電然后進行降壓,整流,最后采用LM7805和LM7812穩壓芯片進行穩壓,產生12V和5V系統供電,穩壓完成后采用多個電容進行濾波保證電源質量,另在電路上設計一個LED發光二極管進行電源指示,詳細電路圖如圖3.9所示。
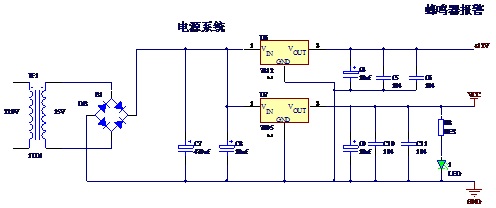
圖3.9 供電電路原理圖
4. 軟件設計4.1 程序設計
系統的程序設計(Programming)過程指的是后期整體程序的設計、編寫、調試的方法和過程。它是目標明確的智力活動。在進行大多數的控制系統的設計時候,除了前期對整體系統硬件的設計外,大量必須的工作就是后期怎樣根據每個系統的實際需要設計對應的符合要求的應用程序。因此,軟件設計在微機控制系統設計中占重要地位。對于本系統,軟件也占有重要的地位。
本系統軟件設計由主程序、初始化程序、液晶顯示程序、傳感器檢測程序、電機驅動程序、舵機驅動程序組成。
4.2 主機主程序系統上電開始工作時首先執行初始化程序,初始化單片機、液晶顯示及相關程序參數初始化。初始化完成后進入while循環主函數,先驅動電機動作帶動傳送帶工作,然后開始光電檢測判斷,當分類光電為高電平時代表檢測到大號產品,驅動舵機左轉,當分類光電檢測為低電平時代表檢測到小號產品帶動光電右轉,檢測完成后最后更新液晶顯示,主機主程序流程圖如圖4.1所示。
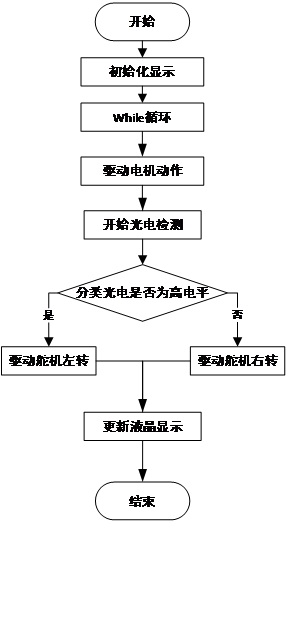
圖4.1 主機主程序流程圖
4.3 LCD顯示程序流程圖LCD1602液晶顯示器在本系統主要用于顯示當前產品計數數值等。首先程序開始后需要對LCD1602顯示器初始化,將屏幕清空,確保顯示正確。然后設置顯示內容需要顯示的位置,然后再寫入需要寫入的數據,如完成寫入反饋給單片機,完成單個字節的顯示寫入,后續其他內容依照上述步驟依次寫入顯示。顯示流程圖如圖4.2所示。
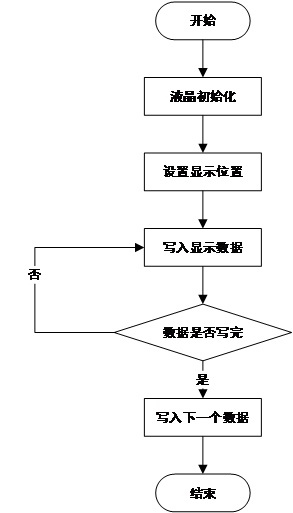
圖4.2 LCD1602液晶顯示器顯示流程圖
 流水線產品分類.doc
(489.5 KB, 下載次數: 7)
流水線產品分類.doc
(489.5 KB, 下載次數: 7)
| 歡迎光臨 (http://www.zg4o1577.cn/bbs/) | Powered by Discuz! X3.1 |