標題: 基于51單片機的步進電機控制系統設計 源程序 [打印本頁]
作者: Southerly 時間: 2022-3-8 15:15
標題: 基于51單片機的步進電機控制系統設計 源程序
[attach]291637[/attach]本設計介紹了一種基于51單片機的步進電機控制系統,該設計采用STC89C51單片機為主控芯片,步進電機由ULN2003A驅動跟單片機相連接,LCD顯示屏實時顯示步進電機信息。步進電機采用八拍運行方式,由單片機發出脈沖信號控制步進電機的通電順序,從而達到控制步進電機運轉的目的。開啟后,通過矩陣鍵盤向單片機輸入脈沖控制信號,以此來實現步進電機的正反轉、加減速、角度設置,最終基本達到了預期目標。
利用單片機,實現用鍵盤控制步進電機的運轉,包括設定步進電機運轉的角度,方向及速度,并顯示其信息。
主控模塊使用STC89C51單片機來作為控制芯片。
輸入模塊的選擇中,考慮到需要設置步進電機運轉角度和其他的功能以及單片機接口的限制,獨立鍵盤的按鍵數量不能滿足要求,所以本設計中采用4×4矩陣鍵盤;只需占用一個I/O口,就可以提供16個按鍵。
顯示模塊的選擇,有LED和LCD兩種顯示方式可供選擇,但考慮到需要顯示的內容較多,LED顯示需要許多的LED數碼管;這樣會占用大量的控制芯片的資源使得顯示模塊的實現極為復雜。考慮到這些因素,本次設計中采用LCD的顯示方式,對比了幾款LCD顯示屏,最終選擇了LCD1602作為顯示模塊。LCD1602可以顯示16×2個字符,可以滿足設計需求。
驅動模塊的選擇,因控制芯片發出的控制信號過于微弱,無法直接驅動被控單元;所以必須在控制芯片與被控單元之間加入一個信號放大模塊,經過幾種信號放大方式的對比,最終決定采用最為可靠的ULN2003A作為驅動模塊。ULN2003A具有很高的直流電流增益,可以很好的驅動步進電機。
被控單元的選擇,本設計采用了常見的28-BYJ-48步進電機。它是一款永磁式、減速型,四相八拍步進電機,有三種工作模式可供選擇。
經過不斷的對比選擇,最終采用了以下方案完成設計;STC89C51單片機作為主控芯片,4×4矩陣鍵盤輸入步進電機控制信息,步進電機采用28-BYJ-48步進電機。因單片機無法直接驅動起電機,所以我們采用ULN2003A驅動芯片來驅動電機,步進電機的運行信息由最后由LCD1602液晶顯示屏顯示。
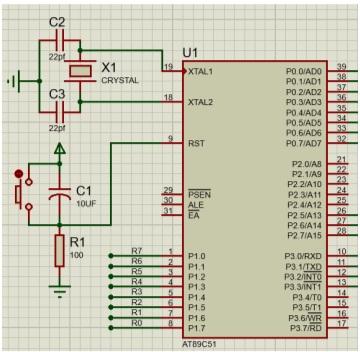
單片機最小系統,也叫做單片機最小應用系統,是指用最少的原件組成單片機可以工作的系統。單片機最小系統的三要素就是電源、時鐘電路、復位電路,電源可使用外部穩定的5V電源供電模塊供給。
復位電路分為按鍵復位和上電復位。上電復位通常在復位引腳RST上連接一個電容到VCC,再連接一個電阻到GND,由此形成一個RC充放電回路保證單片機在上電時RST腳上有足夠時間的高電平進行復位,在RST引腳上加兩個周期的高電平即可使單片機復位,隨后回歸到低電平進入正常工作狀態,這個電阻和電容的典型值為10K和10uF。按鍵復位就是在復位電容上并聯一個開關,當開關按下時電容被放電、RST也被拉到高電平,而且由于電容的充電,會保持一段時間的高電平來使單片機復位。
因單片機內部帶有振蕩電路,所以外部只要連接一個晶振和兩個電容即可,電容容量一般在15pF至30pF之間。電容的作用是幫助晶振起振,并維持振蕩信號的穩定。
圖3.1 單片機最小系統原理圖
LCD1602是一種工業字符型液晶,能夠同時顯示16x2即32個字符。LCD1602液晶顯示的原理是利用液晶的物理特性,通過電壓對其顯示區域進行控制,有電就有顯示,這樣即可以顯示出圖形。1602液晶也叫1602字符型液晶,它是一種專門用來顯示字母、數字、符號等的點陣型液晶模塊。
LCD1602主要參數:顯示容量16×2個字符;芯片工作電4.5—5.5V;工作電流2.0mA,模塊最佳工作電壓5.0V。
與單片機的連接:D0-D7并行連接單片機的P0口,作為數據傳輸;RS,RW,E分別連接單片機P2.5,P2.6,P2.7。RS為寄存器選擇,高電平時選擇數據寄存器、低電平時選擇指令寄存器。R/W為讀寫信號線,高電平時進行讀操作,低電平時進行寫操作。E端為使能端,當E端由高電平跳變成低電平時,液晶模塊執行命令。
3.3 驅動模塊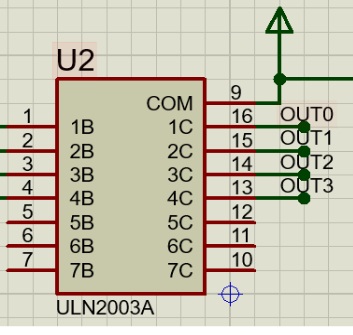
ULN2003A是高耐壓、大電流復合晶體管陣列,由七個硅NPN 復合晶體管組成,每一對達林頓都串聯一個2.7K 的基極電阻,在5V 的工作電壓下它能與TTL 和CMOS 電路直接相連,可以直接處理原先需要標準邏輯緩沖器來處理的數據。ULN2003A 具有電流增益高、工作電壓高、溫度范圍寬、帶負載能力強等特點,適應于各類要求高速大功率驅動的系統。
圖3.3 ULN2003A模塊圖
3.4 矩陣鍵盤原理及電路圖矩陣鍵盤又稱行列鍵盤,如圖3.4所示,它是用四條I/O線作為行線,四條I/O線作為列線組成的鍵盤。在行線和列線的每個交叉點上設置一個按鍵。這樣鍵盤上按鍵的個數就為4×4個。使用矩陣鍵盤時我們用掃描法識別按鍵,按鍵按下時,與此鍵相連的行線與列線導通,行線在無按鍵按下時處在高電平。如果
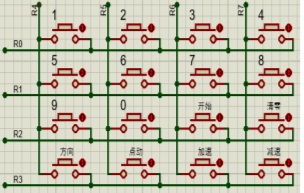
所有的列線都處在高電平,則按鍵按下與否不會引起行線電平的變化,因此必須使所有列線處在電平。這樣當有按鍵按下時,該鍵所在的行電平才會由高變低,才能判斷相應的行有鍵按下。
圖3.4 矩陣鍵盤
表3-4矩陣鍵盤說明表
4 系統軟件設計
4.1 系統軟件流程圖系統軟件設計是本次系統設計的重要組成部分,基于硬件電路條件,整個程序細分為若干個功能模塊來完成,主要有顯示程序模塊、按鍵程序模塊、步進電機模塊。
STC89C51單片機的P1口用來連接矩陣鍵盤,P0口與P2口的P2^5、P2^6、P2^6連接LCD602、最后由P3口借助一個驅動芯片ULN2003與步進電機連接。單片機程序中的主函數完成對LCD1602顯示屏初始化之后,依次調用顯示函數、按鍵查詢函數、角度設置函數。主程序流程圖如圖4.1所示。
4.2 LCD1602顯示流程圖本設計用LCD1602液晶屏作為顯示,主要是將步進電機的角度、速度、方向等信息在LCD1602上面顯示出來,以便于用戶操作。如圖4.2所示為液晶屏顯示控制子程序流程圖。
測試結果及其分析
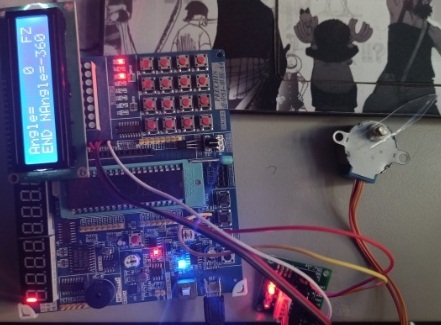
在模擬仿真階段,本設計采用了kile與proteus聯合仿真調試,確保所寫程序可以實現本設計所需要的功能。經過不斷的調試和仿真,在仿真環境下實現了預期的功能。隨后,利用開發板搭建了電路,經過測試ULN2003模塊可以正常驅動電機;下載程序之后,矩陣鍵盤可以正常輸入控制信息,LCD1602液晶顯示正常,步進電機按輸入控制信息能夠正常運轉。但因步進電機減速比的影響,顯示角度與電機實際角度存在誤差。
本文設計了一種基于單片機的步進電機控制系統,采用4×4矩陣鍵盤作為輸入,使用LCD1602顯示信息,如運轉的角度,方向及速度。可通過鍵盤輸入讓步進電機運轉的角度,方向和運轉速度。采用了ULN2003驅動模塊,可以很好的驅動步進電機。實現了對步進電機較為精確的控制。
單片機源程序如下:
- #include<stdio.h>
- #include<reg51.h>
- #include<lcd1602.h>
- #define Motor P3
- void SetAngle(uint angle);
- uchar keyscan();
- uchar code Motortab[]={0x03,0x02,0x06,0x04,0x0c,0x08,0x09,0x01};
- uchar flag=2;
- uint T=5;
- void main()
- {
- static int keyvalue=0;
- static int num=0;
- Init();
- printf("Angle=%5d",0);
- while(1)
- {
- keyvalue=keyscan();
- if(keyvalue)
- {
- if(keyvalue>=0&&keyvalue<=10)
- {
- if(keyvalue==10)
- keyvalue=0;
- num=num*10+keyvalue;
- SetRowCol(0,0);
- printf("Angle=%5d%s",num," ");//角度輸入
- }
- else if(keyvalue==15)
- {
- T--;
- if(T<1)
- T=10;
- SetRowCol(1,6);
- printf("speed=%2d%s",T," ");
-
- }
- else if(keyvalue==16)
- {
- T++;
- if(T>10)
- T=0;
- SetRowCol(1,6);
- printf("speed=%2d%s",T," ");
-
- }
- else if(keyvalue==11) //開始
- {
- if(flag==0)
- {
- SetRowCol(1,0);
- printf("STRAT");
- SetAngle(-(num)*11.5);
- SetRowCol(1,0);
- printf("END ");
- SetRowCol(1,4);
- printf("NAngle=%d%s",-num," ");
- num=0;
- SetRowCol(0,0);
- printf("Angle=%5d%s",num," ");
- flag=2;
- }
- else if(flag==1)
- {
- SetRowCol(1,0);
- printf("STRAT");
- SetAngle(num*11.5);
- SetRowCol(1,0);
- printf("END ");
- SetRowCol(1,4);
- printf("NAngle=%s%d%s"," ",num," ");
- num=0;
- SetRowCol(0,0);
- printf("Angle=%5d%s",num," ");
- flag=2;
- }
- else
- {
- SetRowCol(0,0);
- printf("Angle=%5d%s",num," ");
- flag=2;
- }
- }
- else if(keyvalue==12) //輸入清零
- {
- num=0;
- SetRowCol(0,0);
- printf("Angle=%5d%s",num," ");
- SetRowCol(1,0);
- printf(" ");
- }
- else if(keyvalue==13) //正反轉
- {
- flag=!flag;
- if(flag==0)
- {
- SetRowCol(0,0);
- printf("Angle=%5d%s",num," FZ");
-
- }
- else if(flag==1)
- {
- SetRowCol(0,0);
- printf("Angle=%5d%s",num," ZZ");
- }
- }
- else if(keyvalue==14)//點動
- {
- if(flag==0)
- {
- num--;
- SetRowCol(0,0);
- printf("Angle=%5d%s",num," FZ");
- SetAngle(num*11.5);
- }
- else if(flag==1)
- {
- num++;
- SetRowCol(0,0);
- printf("Angle=%5d%s",num," ZZ");
- SetAngle(num*11.5);
- }
- }
-
- }
- }
- }
- void SetAngle(uint angle)
- {
- static uint FirAngle=0;
- static uint i=0;
- int d;
- uint j;
- d=angle-FirAngle;
- if(d>0)
- {
- for(j=0;j<d;j++)
- {
- i++;
- i=(i&0x0007);
- Motor=Motortab[i];
- delay(T);
- }
- FirAngle=angle;
- }
- else
- {
- for(j=0;j<-d;j++)
- {
- i--;
- i=i&0x0007;
- Motor=Motortab[i];
- delay(T);
- }
- FirAngle=angle;
- }
- }
以上圖文的Word格式文檔下載(內容和本網頁上的一模一樣,方便大家保存):
 基于51單片機的步進電機控制系統.docx
(391.54 KB, 下載次數: 48)
基于51單片機的步進電機控制系統.docx
(391.54 KB, 下載次數: 48)
2022-3-9 20:20 上傳
點擊文件名下載附件
下載積分: 黑幣 -5
-
3.png
(54.04 KB, 下載次數: 138)
下載附件
2022-3-8 15:19 上傳


作者: jovew 時間: 2022-3-9 21:23
Rebuild started: Project: Calendar
Rebuild target 'Target 1'
compiling Cal.c...
C51 FATAL-ERROR -
ACTION: PARSING SOURCE-FILE
ERROR: PREPROCESSOR: MACROS TOO NESTED
C51 TERMINATED.
Target not created.
Build Time Elapsed: 00:00:00
編譯不能通過,怎么辦?
作者: Southerly 時間: 2022-3-12 13:27
每個驅動程序看一下是否添加對
| 歡迎光臨 (http://www.zg4o1577.cn/bbs/) |
Powered by Discuz! X3.1 |
主站蜘蛛池模板:
在线a视频网站
|
天天干夜夜操
|
婷婷久久综合
|
国产精品不卡一区
|
99精品福利视频
|
伊人导航
|
91看片免费版
|
国产精品一区二区日韩
|
国产在线1区
|
久久久2o19精品
|
爱爱综合网
|
aaaa一级毛片|
在线看中文字幕
|
999国产视频
|
在线看片网站
|
九九热在线视频免费观看
|
www.久久久久久久久
|
天堂中文字幕av
|
91大神在线看
|
国产精品99久久久久久动医院
|
国产乱一区二区三区视频
|
欧美激情 亚洲
|
精品一区二区在线观看
|
永久www成人看片
|
午夜小电影
|
一级片网址
|
国产精品久久久久久久久久
|
国产精品毛片无码
|
在线观看黄色电影
|
国产精品视频免费播放
|
欧美性受xxxx白人性爽
|
亚洲在线视频
|
免费xxxx大片国产在线
|
天堂网中文字幕在线观看
|
亚洲超碰在线观看
|
一区二区三区在线
|
www国产亚洲精品久久网站
|
极品的亚洲|
99久久精品免费
|
91久久久久|
欧美三级视频
|