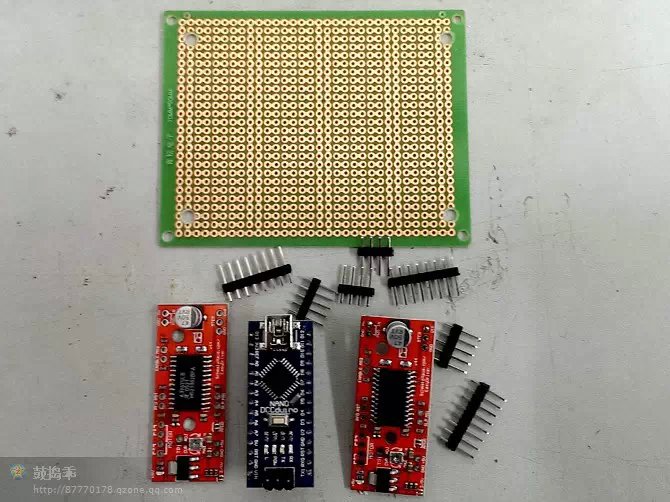
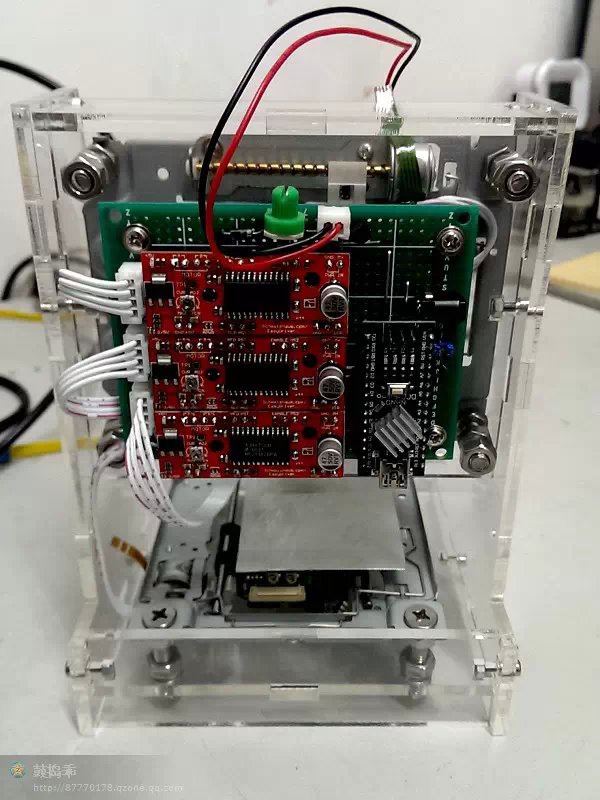
l Easydrive 驅動器電路,由于光驅的步進電機比較小,驅動器就選用了便宜方便的Easydrive步進電機模塊,當然也可以使用其他一些步進電機驅動器。
Easydrive 驅動器
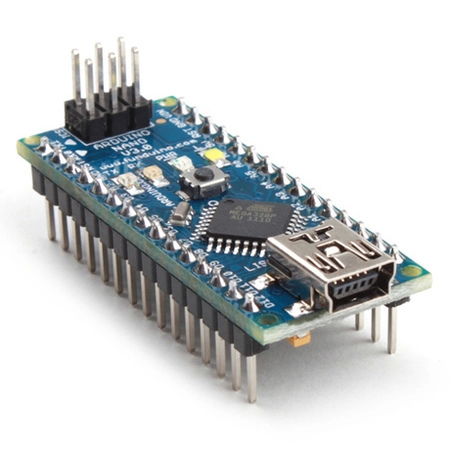
l Arduino (控制電路的核心),我選用的體積小,價格便宜的Arduino nano。
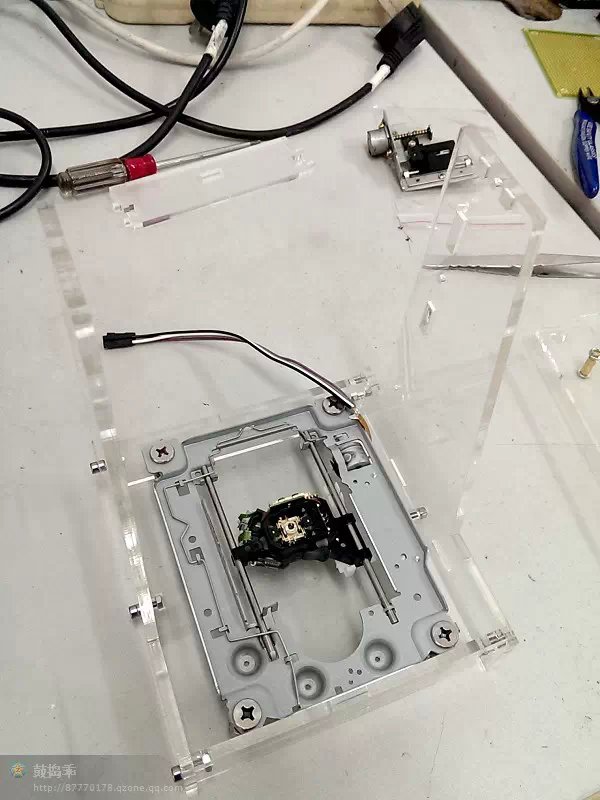
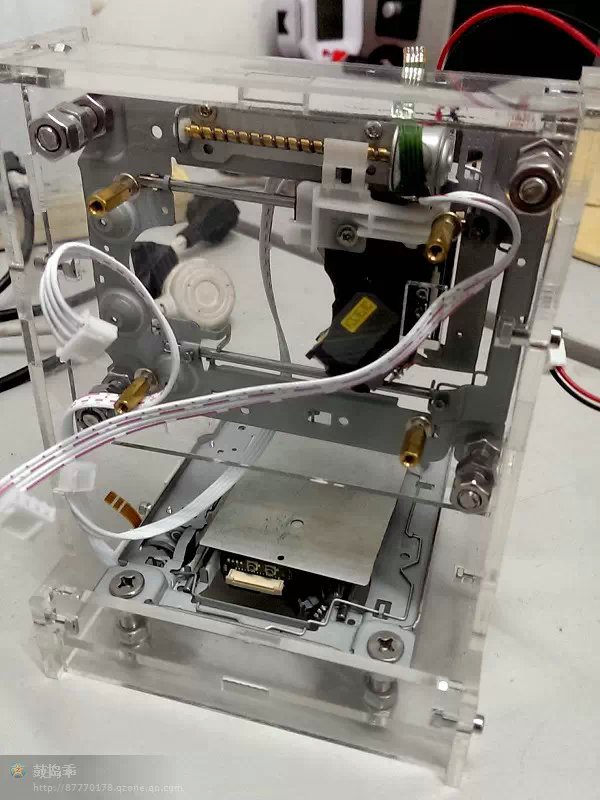
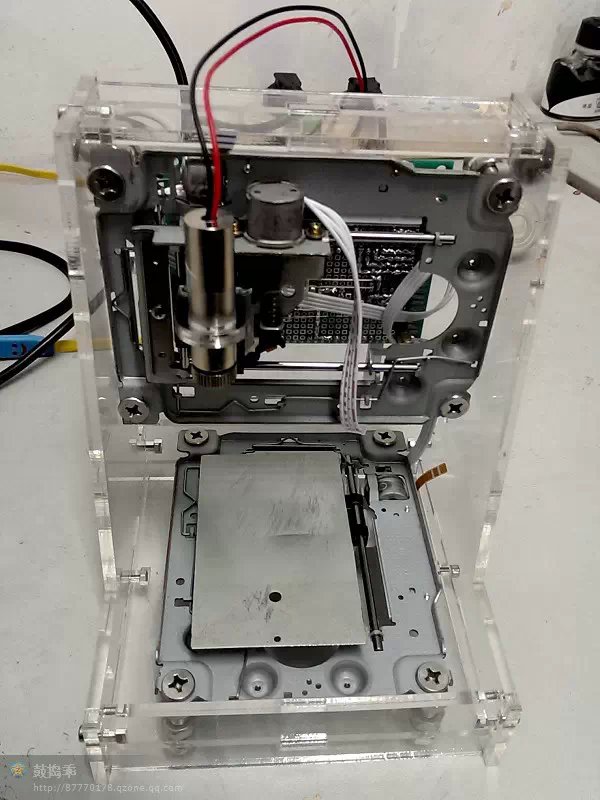
l 準備雕刻機機架:圖方便,機架使用的現成機架。
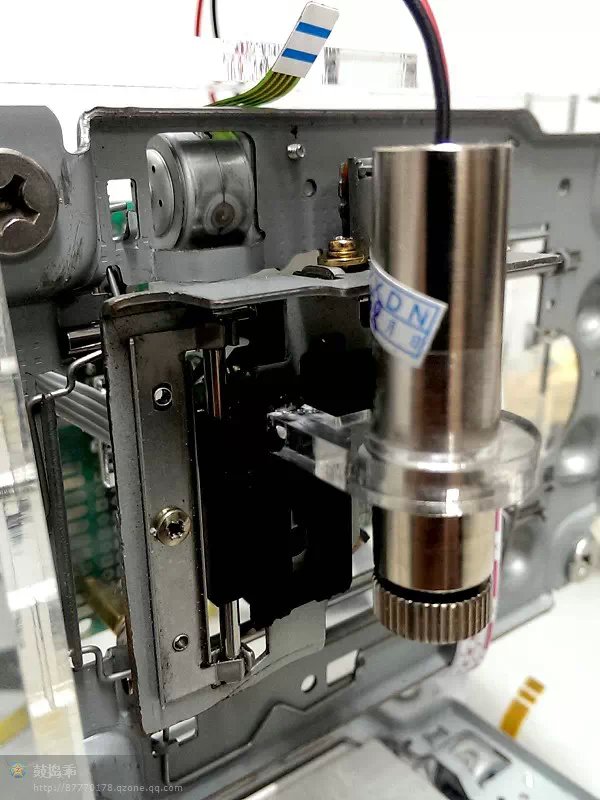
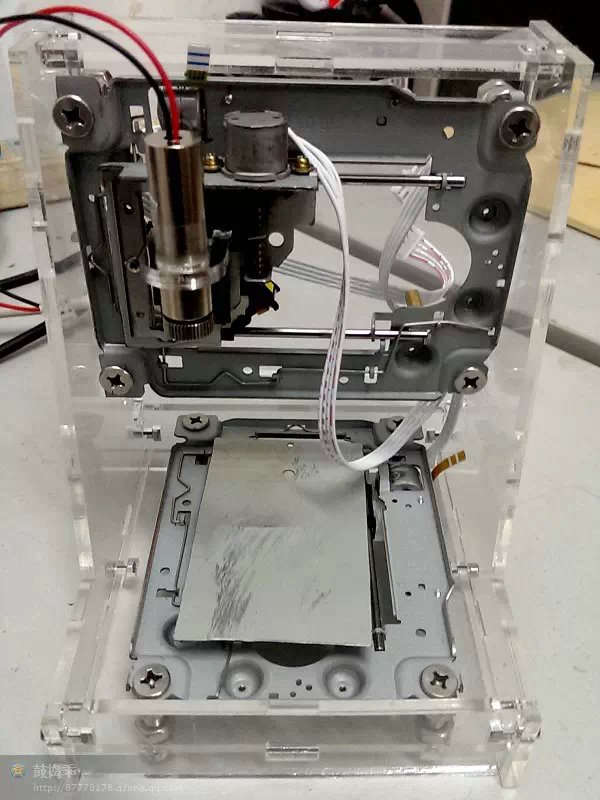
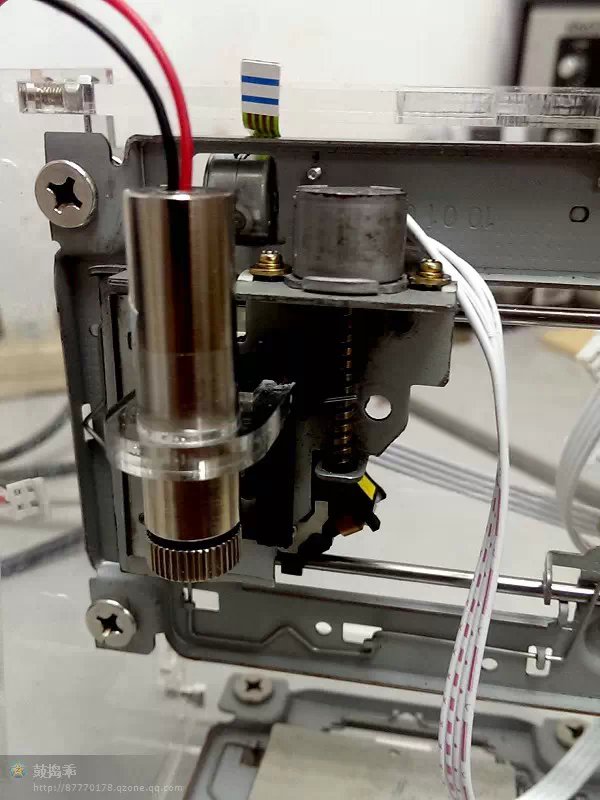
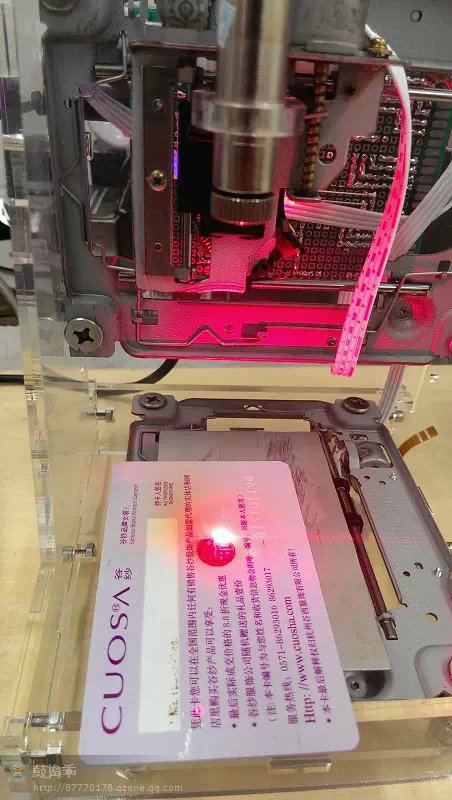
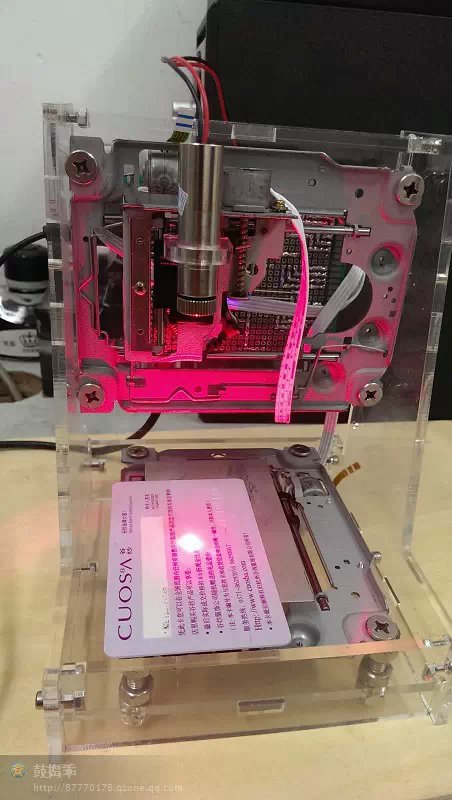
l Z軸處理:用激光刻字實際使用X軸和Y軸,2軸就可以了,為了試驗軟硬件之間的關系,刻意的制作了Z軸。Z軸是使用的一個軟驅的機架和步進電機,安裝在X軸上跟隨X軸運動,Z軸上還要加裝激光器。為了減輕Z軸自身重量給X軸減輕負擔,將Z軸機架多余部分全部去掉,只留下步進電機運動部分,在Z軸上粘上激光器固定支架。
l 激光器:本來可以使用刻錄機的激光二極管,可惜沒有刻錄機拆,另外買的激光器,紅色光約300mw,藍色光100mw。














 不錯。能發個固件跟雕刻軟件么謝謝.12095999299@qq.com
不錯。能發個固件跟雕刻軟件么謝謝.12095999299@qq.com