標題: EDA乒乓球實驗報告 [打印本頁]
作者: hongniu 時間: 2015-6-25 02:48
標題: EDA乒乓球實驗報告
EDA fpga乒乓球實驗報告指導老師:楊月 姓名: 孫鵬 吳斌 李文伯
一實驗原理:利用兩個按鍵表示兩位選手,LED燈表示乒乓球的軌跡,數碼管顯示擊球結果。
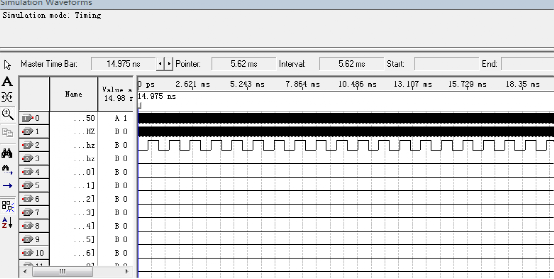
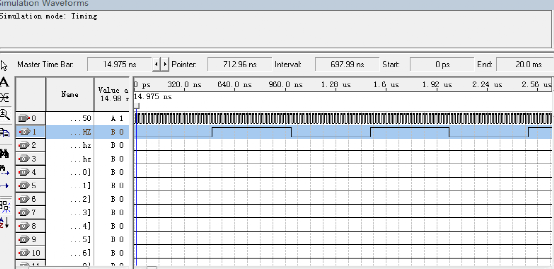
本程序由3個部分組成,第一部分為分頻程序,將de2自帶的50Mhz頻率分為1MHZ,1lKHZ,10hz.第二部分為數碼管分時掃描程序,掃描速度1khz.第三部分是擊球狀態機程序。
因手上無示波器,也無必要用示波器,分頻仿真如下圖所示:
由乒乓球跳動速度來看,乒乓球在接發球時速度可以達到0.4s,乒乓球在運行中速度慢些,可以達到0.8s.
二源代碼如下所示:module pinpang(clk_1MHZ,clk_1khz,clk_10hz,clk_27,clk_50,hex0,hex1,hex2,hex3,hex4,hex5,hex6,hex7,clc,set_r,set_l,led_r);
input clc,set_r,set_l; //定義清除鍵,在程序中按下不放為暫停
input clk_27,clk_50; //定義輸入時鐘信號,此程序中只用了clk_50,即50M的頻率
output clk_1MHZ,clk_1khz,clk_10hz;//定義分頻后信號1MHZ,1KHZ,10HZ
reg clk_1MHZ,clk_1khz,clk_10hz;
reg[5:0] clk_sum;//1MHZfenpin //定義分頻1MHZ計數器
reg[9:0] clk_sum1k;//fenpinwei 1khz //定義分頻1khz分頻器
reg[6:0] clk_sum10hz;//ledxianshipinlv //定義分頻10hz分頻器
reg[6:0] hex_buff1; //定義數碼管緩存寄存器
reg[3:0] hex_buff; //定義數碼管取值寄存器
reg[3:0] hex_sum; //數碼管掃描片選信號
reg[3:0] r_sum,l_sum; //定義每局中左邊或者右邊得分數目默認a_為左,b_為右
reg[3:0] ju_sum; //led燈延時計數器,每100ms計數一次
reg[2:0] a_run,b_run; //定義左邊和右邊當前贏得的局數
reg[2:0] state; //定義狀態機所處位置
reg[3:0] game_on; //定義按鍵處于何種狀態
reg[31:0] time_sum; //定義LED從次態到現態時間
reg[4:0] qiu; //定義當前LED燈位置
output[6:0] hex0,hex1,hex2,hex3,hex4,hex5,hex6,hex7;//8段數碼管顯示數
reg[6:0] hex0,hex1,hex2,hex3,hex4,hex5,hex6,hex7;
output[17:0]led_r;
reg [17:0]led_r; //led燈狀態
parameter hexx0=7'b1000000, //0
hexx1=7'b1111001, //1
hexx2=7'b0100100, //2
hexx3=7'b0110000, //3
hexx4=7'b0011001, //4
hexx5=7'b0010010, //5
hexx6=7'b0000010, //6
hexx7=7'b1111000, //7
hexx8=7'b0000000, //8
hexx9=7'b0010000, //9
hexxn=7'b1111111; //null
always@(posedge clk_50)begin //fenpinwei1MHZ
clk_sum<=clk_sum+6'b000001; //分頻為1MHZ
if(!clc)
clk_sum<=0;
if(clk_sum==24)begin
clk_sum<=0;
clk_1MHZ<=~ clk_1MHZ;
end
end
always@(posedge clk_1MHZ)begin //FENPINWEI 1KHZ
clk_sum1k<=clk_sum1k+10'b0000000001; //分頻為1KHZ
if(!clc)
clk_sum1k<=0;
if(clk_sum1k==499)begin
clk_sum1k<=0;
clk_1khz<=~ clk_1khz;
end
end
always@(posedge clk_1khz)begin //FENPINWEI 10HZ//分頻為10hz
clk_sum10hz<=clk_sum10hz+7'b0000001;
if(!clc)
clk_sum10hz<=0;
if(clk_sum10hz==49)begin
clk_sum10hz<=0;
clk_10hz<=~ clk_10hz;
end
end
always@(posedge clk_1khz)begin //FENPINWEI 1kHZ//在1kHz內處理數碼管和按鍵
hex_sum<=hex_sum+4'b0001;
if(!clc)
hex_sum<=0;
if(hex_sum==8)
hex_sum<=0;
case(hex_sum)
6:hex_buff<=a_run; //第二位 顯示左邊邊當前贏得局數,實際為0
//由于de2開發板數碼管位置移位,故該程序中數碼管非實驗板相應位置,需要調整
7:hex_buff<=b_run; //第一位顯示右邊當前贏得局數
0:hex_buff<= a_run; //第三位顯示左邊贏得局數
1:hex_buff<= ju_sum%10;//第四位顯示當前局數
2:hex_buff<= r_sum%10; //第五位顯示右邊當前得分個位
3:hex_buff<= r_sum/10; //第六位顯示右邊當前得分十位
4:hex_buff<= l_sum%10; //第七位顯示當前左邊贏得得分個位
5:hex_buff<= l_sum/10; //第八位顯示當前左邊贏得得分十位
default:hex_buff=4'b1111;
endcase
if(!set_l)
begin
if(state==5||state==0)
//左按鍵按下,判斷LED燈是否落在左邊,若果是繼續下去,否則記為錯誤按左鍵
game_on<=4'b0110;
else
game_on<=4'b1110;
end
if(!set_r)
begin
if(state==2||state==3)
//右按鍵按下,判斷LED燈是否落在右邊,若果是繼續下去,否則記為錯誤按右鍵
game_on<=4'b0101;
else
game_on<=4'b1101;
end
end
always@(negedge clk_1khz) begin
//在clk-1khz的下降沿中處理函數,將數碼管中緩存值翻譯過來,賦給數碼管
case(hex_buff)
0:hex_buff1<=hexx0;
1:hex_buff1<=hexx1;
2:hex_buff1<=hexx2;
3:hex_buff1<=hexx3;
4:hex_buff1<=hexx4;
5:hex_buff1<=hexx5;
6:hex_buff1<=hexx6;
7:hex_buff1<=hexx7;
8:hex_buff1<=hexx8;
9:hex_buff1<=hexx9;
default:hex_buff1<=hexx0;
endcase
case(hex_sum)
0: hex0<=hex_buff1;
1: hex1<=hex_buff1;
2: hex2<= hex_buff1;
3: hex3<= hex_buff1;
4: hex4<=hex_buff1;
5: hex5<= hex_buff1;
6: hex6<= hex_buff1;
7: hex7<= hex_buff1;
default:
begin
hex0<=hexxn;
hex1<=hexxn;
hex2<=hexxn;
hex3<=hexxn;
hex4<=hexxn;
hex5<=hexxn;
hex6<=hexxn;
hex7<=hexxn;
end
endcase
end
always@(posedge clk_10hz)begin //每100ms進行狀態機設置
time_sum<=time_sum+1;
led_r=0; //避免LED全亮,先將LED全滅
if(time_sum==8) //每個LED燈間隔發光的時間不超過0.8s
time_sum<=0;
case(state)
5: //狀態5左邊發球
if(game_on==4'b0110)//如果檢測到左鍵正確按下,執行程序
begin
led_r[qiu]=1;
if(time_sum==3)begin //如果LED燈已走了0.4s,則點亮下個LED燈
time_sum<=0;
led_r[qiu]=0; //先將現態LED燈光滅,在點亮下個LED燈
qiu<=qiu-5'b00001;
led_r[qiu]=1;
if(qiu<=14)
//因為定義了18個LED燈作為實驗乒乓球臺,所以當左邊已發完球后,應立即進入左邊運球給右邊的狀態4
state<=4;
end
end
else
begin / /如果沒有檢測到左鍵正確按下,則LED【17】常亮
led_r[17]<=~led_r[17];
end
4: //左邊運球到右邊的狀態
begin
led_r[qiu]=1; //若果球已到右邊接球邊界,進入右邊接球狀態3
if(qiu<=3)
state<=3;
if(state==4)
begin
if(game_on==4'b1101)begin
l_sum<=l_sum+4'b0001;
state<=2; //若右鍵在運球中錯誤按下,算右邊犯規,左邊加一分
led_r[qiu]=0; //球歸右邊并自動發球
qiu<=0;
led_r[qiu]=1;
time_sum<=1;
end
if(time_sum==0)begin
led_r[qiu]=0;
qiu<=qiu-5'b00001;
led_r[qiu]=1; //運球沒有失誤,進入右邊接球狀態3
if(qiu<=3)
state<=3;
end
end
end
3:
begin
if(game_on==4'b0101)
begin
state<=2;
led_r[qiu]=0;
qiu<=qiu+5'b00010; //若已接球,立即進入狀態2或1
led_r[qiu]=1;
end
if(state==3)
begin
led_r[qiu]=1;
if(time_sum==3)begin //接球中LED燈閃動速度為0.4s
time_sum<=0;
led_r[qiu]=0;
qiu<=qiu-5'b00001;
led_r[qiu]=1;
if(qiu==0)begin
state<=2;
l_sum<=l_sum+4'b0001; //若接球失敗,進入右邊準備發球狀態,左邊得一分
end
end
end
end
2:
if(game_on==4'b0101)
begin
led_r[qiu]=1;
if(qiu>=3) //若超出界限,立即進入狀態右邊運球左邊的狀態1
state<=1;
if(state==2)begin
if(time_sum==3)begin
time_sum<=0;
led_r[qiu]=0;
qiu<=qiu+5'b00001;
led_r[qiu]=1;
if(qiu>=3)
state<=1;
end
end
end
else
begin
led_r[0]<=~led_r[0]; //若當前沒有有效右鍵按下,一直處于等待階段。
end
1:
begin
led_r[qiu]=1;
if(qiu>=14)
state<=0;
if(state==1)begin
if(game_on==4'b1110)begin
r_sum<=r_sum+4'b0001;
state<=5;
//運球過程中,左邊錯誤按下,右邊得一分,球立即從左邊發出
led_r[qiu]=0;
qiu<=17;
led_r[qiu]=1;
time_sum<=1;
end
if(time_sum==0)begin
led_r[qiu]=0;
qiu<=qiu+5'b00001;
led_r[qiu]=1; //球到左邊接球邊界,進入左邊接球狀態0
if(qiu>=14)
state<=0;
end
end
end
0:
begin
if(game_on==4'b0110)
Begin //左鍵正確按下,進入左邊發球狀態
state<=5;
led_r[qiu]=0;
qiu<=qiu-5'b00010;
led_r[qiu]=1;
end
if(qiu==17)begin
//初始狀態球可能賦值為零,這里強制轉換到狀態5,實際沒有出現這種狀態
state<=5;
r_sum<=r_sum+4'b0001;
end
led_r[qiu]=1;
if(state==0)
begin
if(time_sum==3)begin
time_sum<=0;
led_r[qiu]=0;
qiu<=qiu+5'b00001;
led_r[qiu]=1;
if(qiu==17)begin
//左邊球落到最后一個LED上,說明球已過線,左邊接球失敗,右邊加一分
state<=5;
r_sum<=r_sum+4'b0001;
end
end
end
end
if(r_sum==11||l_sum==11)begin
//11分為一局,一局結束后進行下一局,左邊右邊當前局數歸零,總局數加一
if(l_sum==11)a_run<=a_run+1;
if(r_sum==11)b_run<=b_run+1;
r_sum<=0;
l_sum<=0;
ju_sum<=ju_sum+4'b0001;
end
//若已進行7局,則比賽從新開始
if(ju_sum==7)begin
ju_sum<=0;
a_run<=0;
b_run<=0;
end
end
endmodule
//本程序僅供參考,可能與實際不符
三實驗感想:通過一天多來的努力,我們終于把老師交給我們的任務完成了,明白了fpga編程的一些小技巧。開始第一天因為電腦系統原因,無法安裝驅動,后來換了電腦驅動就可以安裝了。到網上沒有找到引腳庫文件,所以只好自己一個一個定義引腳。
在編程過程中,發現直接賦值常數語句最好用x’b---比較好,否則程序默認常數為32位,出現警告。在整個模塊中,寄存器值只能在某個always語句中被賦值,否則會出現錯誤。定義的輸入輸出引腳,寄存器引腳也最好使用,否則也會出現警告,若這些變量不需要使用,可以注釋掉,以便不時之需。
| 歡迎光臨 (http://www.zg4o1577.cn/bbs/) |
Powered by Discuz! X3.1 |
主站蜘蛛池模板:
久久久久国产成人精品亚洲午夜
|
久久久久久国产精品三区
|
www.日韩欧美
|
久久久91精品国产一区二区精品
|
久久成人一区
|
99热都是精品
|
日韩欧美中文
|
欧美精品网站
|
韩日一区
|
欧美高清性xxxxhd
|
www.久久精品
|
国产视频中文字幕
|
国产精品一区二区视频
|
国产精品伦理一区
|
欧美日韩一区二区三区视频
|
91九色婷婷|
免费一二区
|
亚洲精品视频免费观看
|
国产成人精品一区
|
国产精品综合色区在线观看
|
欧一区二区
|
91看片网
|
亚洲精品二三区
|
毛片电影
|
国产一区影院
|
日韩有码在线播放
|
中文字幕av亚洲精品一部二部
|
日韩欧美在线不卡
|
久久久日韩精品一区二区三区
|
欧美日韩一区二区三区不卡视频
|
91在线一区|
亚洲 欧美 日韩 在线
|
国产视频h|
亚洲精品一区二区三区中文字幕
|
91中文视频
|
www.久久.com
|
国产精品福利视频
|
一区视频在线
|
久久久久久久久国产
|
国产日韩欧美二区
|
精品久久一
|