數據編號 | 數據內容 | 含義 |
0 | 0x55 | 包頭 |
1 | 0x51 | 標識這個包是加速度包 |
2 | AxL | X軸加速度低字節 |
3 | AxH | X軸加速度高字節 |
4 | AyL | y軸加速度低字節 |
5 | AyH | y軸加速度高字節 |
6 | AzL | z軸加速度低字節 |
7 | AzH | z軸加速度高字節 |
8 | TL | 溫度低字節 |
9 | TH | 溫度高字節 |
10 | Sum | 校驗和 |
數據編號 | 數據內容 | 含義 |
0 | 0x55 | 包頭 |
1 | 0x52 | 標識這個包是角速度包 |
2 | wxL | X軸角速度低字節 |
3 | wxH | X軸加速度高字節 |
4 | wyL | y軸加速度低字節 |
5 | wyH | y軸加速度高字節 |
6 | wzL | z軸加速度低字節 |
7 | wzH | z軸加速度高字節 |
8 | TL | 溫度低字節 |
9 | TH | 溫度高字節 |
10 | Sum | 校驗和 |
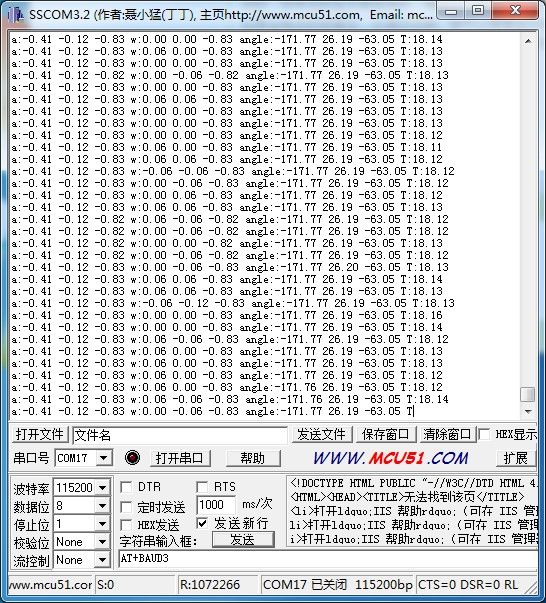
數據編號 | 數據內容 | 含義 |
0 | 0x55 | 包頭 |
1 | 0x53 | 標識這個包是角度包 |
2 | RollL | X軸角度低字節 |
3 | RollH | X軸角度高字節 |
4 | PitchL | y軸角度低字節 |
5 | PitchH | y軸角度高字節 |
6 | YawL | z軸角度低字節 |
7 | YawH | z軸角度高字節 |
8 | TL | 溫度低字節 |
9 | TH | 溫度高字節 |
10 | Sum | 校驗和 |

1.23 KB, 下載次數: 45, 下載積分: 黑幣 -5
4.28 MB, 下載次數: 35, 下載積分: 黑幣 -5
| 歡迎光臨 (http://www.zg4o1577.cn/bbs/) | Powered by Discuz! X3.1 |