久久久久久久999_99精品久久精品一区二区爱城_成人欧美一区二区三区在线播放_国产精品日本一区二区不卡视频_国产午夜视频_欧美精品在线观看免费
<mark id="16116"><form id="16116"></form></mark>
<cite id="16116"></cite>
<label id="16116"></label>
<u id="16116"><form id="16116"></form></u>
<button id="16116"><form id="16116"></form></button>
��(bi��o)�}:
ֱ��늙C(j��)���(q��)��(d��ng)ԭ������Ƭ�C(j��)+L298���Ƴ���
[��ӡ���(y��)]
����:
51�ںں�
�r(sh��)�g:
2016-2-13 02:17
��(bi��o)�}:
ֱ��늙C(j��)���(q��)��(d��ng)ԭ������Ƭ�C(j��)+L298���Ƴ���
ֱ��늙C(j��)�Æ�Ƭ�C(j��)���ƕr(sh��)��Ҫ���(q��)��(d��ng)�·��Ŀ�����ṩ����������һ���(l��i)�f(shu��)��ֱ��늙C(j��)���(q��)��(d��ng)��Ҫ�_(d��)���D�ܺ͌�(zhu��n)���(q��)��(d��ng)оƬ����(d��ng)Ȼ�������MOS�����д�(q��)��(d��ng)�·�����]��늙C(j��)Ч�ʺͽ�(j��ng)��(j��)�Ć�(w��n)�}�����_(d��)���D�ܷ��㣬���ǟo(w��)������늙C(j��)���D(zhu��n)���(q��)��(d��ng)оƬ�t�@�ñ��^���㡣
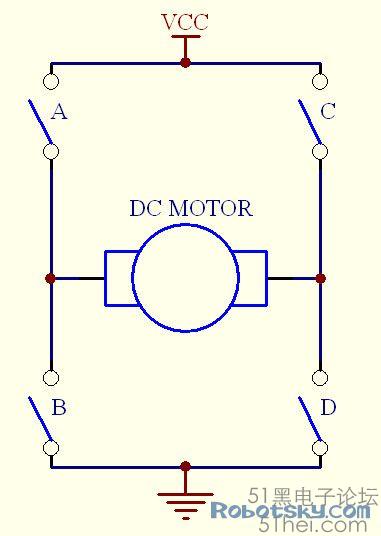
���^ H���(q��)��(d��ng)�·�Ǟ���ֱ��늙C(j��)���O(sh��)Ӌ(j��)��һ�N��Ҋ(ji��n)�·������Ҫ��(sh��)�F(xi��n)ֱ��늙C(j��)���������(q��)��(d��ng)��������·��ʽ���£�
�ĈD�п��Կ��������Π��(l��i)������ĸ��H����������ؓ(f��)�d��ֱ��늙C(j��)����һ�Ӽ�������ģ����ԷQ(ch��ng)֮�顰H���(q��)��(d��ng)����4��(g��)�_(k��i)�P(gu��n)����λ�þͷQ(ch��ng)�顰��ۡ������·�в��y���������O(sh��)�_(k��i)�P(gu��n)A��D��ͨ��늙C(j��)�������D(zhu��n)��(d��ng)���t�_(k��i)�P(gu��n)B��C��ͨ�r(sh��)��ֱ��늙C(j��)�������D(zhu��n)��(d��ng)���Ķ���(sh��)�F(xi��n)��늙C(j��)���������(q��)��(d��ng)��
�����@ 4��(g��)�_(k��i)�P(gu��n)߀���Ԯa(ch��n)������ 2 ��(g��)늙C(j��)�Ĺ�����B(t��i)��
A�� �x܇(ch��) ���� ��B��D�_(k��i)�P(gu��n)����A��C����ͨ���t늙C(j��)�T���D(zhu��n)��(d��ng)�a(ch��n)����늄�(sh��)������·���γ���K�\(y��n)��(d��ng)�ķ�늄�(sh��)���γɡ��x܇(ch��)�����á�
B�� ���� ����4��(g��)�_(k��i)�P(gu��n)ȫ�����_(k��i)���t늙C(j��)�T�����a(ch��n)����늄�(sh��)���o(w��)���γ��·���Ķ�Ҳ�Ͳ���(hu��)�a(ch��n)����K�\(y��n)��(d��ng)�ķ�늄�(sh��)��늙C(j��)���T���D(zhu��n)��(d��ng)�^�L(zh��ng)�r(sh��)�g��
����ֻ�Ǐ�ԭ����������H���(q��)��(d��ng)������(sh��)�H��(y��ng)���к������_(k��i)�P(gu��n)��(g��u)�ɘ�ۣ�ͨ��ʹ�þ��w�ܣ���?y��n)���Ƹ��鷽�㣬�ٶȉ������L(zh��ng)���н��c(di��n)���_(k��i)�P(gu��n)���^�������
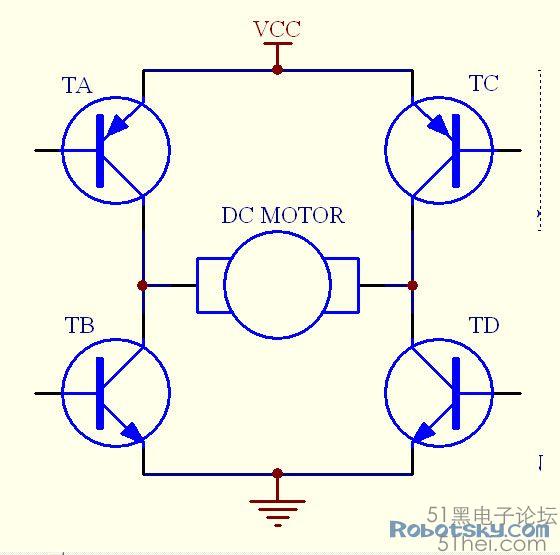
��(x��)����(l��i)�����w�����p�O�Ժ�MOS��֮�֣��������·ֻ�nj��������ɶ��ѣ��䌍(sh��)�|(zh��)߀���@�ɷN���w�ܣ�ֻ�Ǟ����O(sh��)Ӌ(j��)��ʹ�÷��㡢�ɿ���������һ�K�·��
�p�O�Ծ��w�ܘ�(g��u)�ɵ�H��
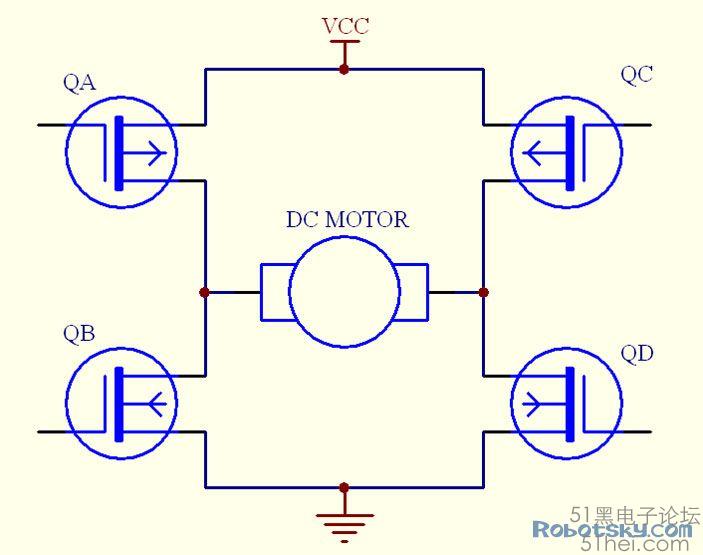
MOS�ܘ�(g��u)�ɵ�H��
�N����H���(q��)��(d��ng)�·������
����֮ǰ������Ҫ�_�� H ��Ҫ�P(gu��n)ע��Щ���ܣ�
A��Ч�� �������^�(q��)��(d��ng)Ч�ʸߣ�����Ҫ��ݔ��������M�����ݔ���oؓ(f��)�d�����(q��)��(d��ng)�·������ò����Ļ����������������w��H���ϣ�Ҳ����4��(g��)����ڌ�(d��o)ͨ�r(sh��)��Û](m��i)�Љ�����ԽСԽ�á�
B����ȫ�ԡ��� ����ͬ��(c��)���ͬ�r(sh��)��(d��o)ͨ��
C��늉����� �܉���ܵ��(q��)��(d��ng)늉���
D��������� �܉�ͨ�^(gu��)���(q��)��(d��ng)�����
������ˣ��м�(x��)������ָ��(bi��o)B���ƺ�����H�����Ć�(w��n)�}�����ǿ��Ʋ���Ҫ���]�ġ�
����ɂ�(g��)ָ��(bi��o)ͨ�^(gu��)�x����m����(sh��)�������Ϳ����_(d��)����ֻҪ������Щ�e���ؓ(f��)�d����ÿ�N����ͨ�������x�����ң�С܇(ch��)��(y��ng)�������������������늉��������ޡ�
ֻ��ָ��(bi��o)A�����ɲ�ͬ�������������Q���ģ�
�������\(y��n)�����(y��ng)ԓ�P(gu��n)ע��ָ��(bi��o)����?y��n)���ֱ��Ӱ���늙C(j��)�(q��)��(d��ng)��Ч�ʡ����ԣ���(j��ng)���������c(di��n)����Ч���ϣ�Ҳ���ǘ�۵ĉ����ϡ�
����ʹ������(ji��n)�Σ����ڱ��^����H ����(q��)��(d��ng)�����λ��2Aˮƽ�ϣ���늉���5 - 12V֮�g��
�x������(g��)�����漰����������
A���p�O�Ծ��w�ܡ��� D772��D882
B��MOS�ܡ��� 2301��2302
C�������·H�� L298
D772�ĉ���ָ��(bi��o)���£�
D882�ĉ���ָ��(bi��o)���£�
2301�ĉ���ָ��(bi��o)���£�
��?y��n)�MOS�����Ԍ�(d��o)ͨ����(l��i)�����ģ���Ҫ�Q��һ�£�С܇(ch��)�Ŀ���늉���4.5V��������Č�(d��o)ͨ���Ӌ(j��)�㣬2A�ĉ�����(y��ng)ԓ�ǣ�2*0.093=0.186V������ǣ�2*0.13=0.26V��
2302�ĉ���ָ��(bi��o)���£�
ͬ�ϓQ��һ�£�С܇(ch��)�Ŀ���늉���4.5V��늳�늉�����������Č�(d��o)ͨ���Ӌ(j��)�㣬2A�ĉ�����(y��ng)ԓ�ǣ� 2* 0.045 =0.09V������ǣ�2 * 0.06 = 0.12V��
L298�ĉ���ָ��(bi��o)���£�
���е�һ�О��Ϙ�۵ĉ�������(du��)��(y��ng)D772��2301���ڶ��О���۵ĉ�������(du��)��(y��ng)D882��2302�������О����֮�͡���(du��)��һ�²��y�������������2A����(q��)��(d��ng)Ӌ(j��)�㣬���N�(q��)��(d��ng)
���������ĵĹ���
���£�
D772��D882�� ��0.5+0.5��* 2 = 2 W
2301��2302�� ��0.26+0.12)* 2 = 0.76 W
L298�� 4.9* 2 = 9.8 W
������(q��)��(d��ng)һ��(g��) 4.5V ��2A��ֱ��늙C(j��)������
늙C(j��)�õ��Ĺ����ǣ�4.5*2 = 9W��
��D772��D882 �t��Ҫ���5.5V��Ч�ʞ飺9/��5.5*2��= 81% ��
��2301��2302 �t��Ҫ���4.88V��Ч�ʞ飺9 /��4.88*2��= 92%
��L298 �t��Ҫ��� 9.4V ��Ч�ʞ飺9/��9.4*2��= 48 %
���@�M��(sh��)��(j��)߀���Կ������ߵ�ɢ�����������β��ԭ��
ͬ�r(sh��)����ˈA��(m��ng)С܇(ch��)�_(k��i)ʼʹ��D772��D882 �(q��)��(d��ng)�r(sh��)����x�� 3V��130늙C(j��),��?y��n)�С�?ch��)��4��(ji��)���늳ع�늣�ֻ��4.8~5V��H��1V������ֻ��ʹ��3V��늙C(j��)��������MOS���(q��)��(d��ng)���x����4.5V��N20늙C(j��)����?y��n)�MOS��ֻ����(l��i)��0.4V�����ĉ�����������L298�ĉ�����͕�(hu��)֪����������늙C(j��)��Ҫ2A���ҵĆ���(d��ng)�������ʹ��5V�Ǹ����o(w��)�������ġ���(sh��)�H��ʹ�� L298��ֻ���(q��)��(d��ng)����������늙C(j��)�Ĺ��늉������Ŀ����ƽҪ��Ҳʹ������o(w��)��ʹ�õ��� 6V �Ĺ���늉�����������Ϣ��
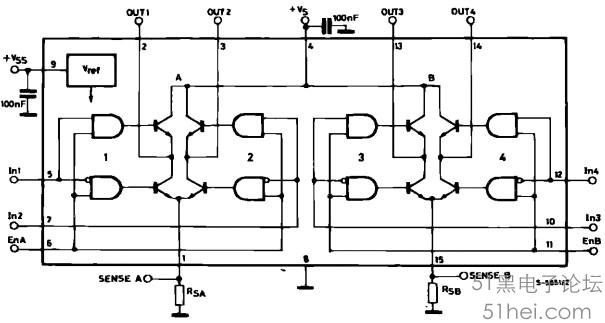
����Vs��늙C(j��)�(q��)��(d��ng)�Ĺ��늉���L298��2·��늣�һ·��늙C(j��)�(q��)��(d��ng)�ģ�����H���ϵģ�һ·�ǹ��o߉�·�ģ�ViH��ָ߉����ݔ����ƽ��
�˅���(sh��)�ĺ��x�ǣ�늙C(j��)�(q��)��(d��ng)늉���횴���߉�����ƽ2.5V��������߉����ʹ��5V��늣���늙C(j��)�Ĺ��늉�����7.5V����t���o(w��)�����C���������������㌢߉�����ƽ���͡�
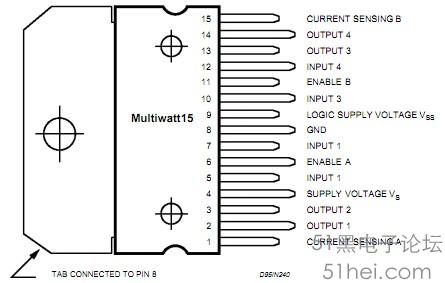
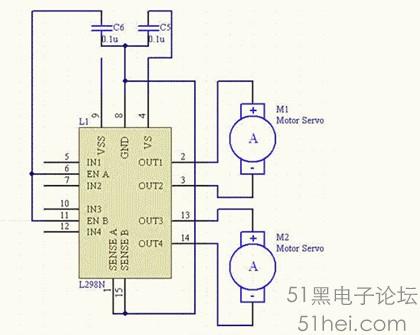
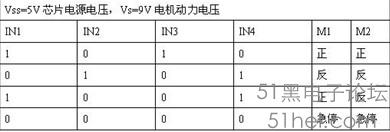
늙C(j��)�(q��)��(d��ng)оƬL298��B��
L298��SGS��˾�Įa(ch��n)Ʒ����(n��i)������4ͨ��߉�(q��)��(d��ng)�·����һ�N���������늙C(j��)�Č�(zhu��n)���(q��)��(d��ng)��������(n��i)������(g��)H��ĸ�늉������ȫ��ʽ�(q��)��(d��ng)��������(bi��o)��(zh��n)TTL߉�ƽ��̖(h��o)�������(q��)��(d��ng)46V��2A���µ�늙C(j��)��1�_��15�_�ɆΪ�(d��)�����B������ɘ���������γ����������̖(h��o)��L298���(q��)��(d��ng)2��(g��)늙C(j��)��2��OUT1)��3(OUT2)��13(OUT3)��14(OUT4)֮�g�քe��2��(g��)늄�(d��ng)�C(j��)��5(IN1)��7(IN2)��10(IN3)��12(IN4)��ݔ������ƽ������늙C(j��)�������D(zhu��n)��7��ENA����8��ENB���ӿ���ʹ�ܶˣ�����늙C(j��)��ͣ�D(zhu��n)��9(Vss)��߉�ƽ����VCC)��4(Vs)�ӽo늙C(j��)��늵��Դ������(j��)оƬ�f(shu��)����Ҫ��Vs>Vss+2.5��
���͑�(y��ng)�ã�
89C52��L298����ֱ��늙C(j��)
���������˃ɷN������(l��i)ݔ��PWM���Σ��քe��ܛ���ӕr(sh��)���Ͷ��r(sh��)��0��늙C(j��)�(q��)��(d��ng)оƬ��L298�����������Y��Ҋ(ji��n)IC�W(xu��)��(x��)�Pӛ��
������a��
#include<reg52.h>
#define uchar unsigned char
#define uint unsigned int
sbit IN1=P2^0;
sbit IN2=P2^1;
sbit key1=P2^3;//�Դ
sbit key2=P2^4;//��ͣ
sbit key3=P2^5;//����
sbit key4=P2^6;//����
sbit key5=P2^7;//����
sbit key6=P3^4;//����
sbit power=P3^6;//�Դ����
uchar choice=0;
uchar an1=0;
uchar count=0;
void delay1ms(uint z)
{
uint x;
uint y;
for(x=z;x>0;x--)
for(y=122;y>0;y--);
}
void PWMZ()
{
IN1=1;
delay1ms(1);
IN1=0;
delay1ms(2);
}
void PWMF()
{
TR0=1;
while(!TF0);
}
void keyscan()
{
if(key1==0)
{
delay1ms(10);
if(key1==0)
{
while(!key1);
an1++;
if(an1==2) an1=0;
choice=1;
}
}
if(key2==0)
{
delay1ms(10);
if(key2==0)
{
while(!key2);
choice=2;
}
}
if(key3==0)
{
delay1ms(10);
if(key3==0)
{
while(!key3);
choice=3;
}
}
if(key4==0)
{
delay1ms(10);
if(key4==0)
{
while(!key4);
choice=4;
}
}
if(key5==0)
{
delay1ms(10);
if(key5==0)
{
while(!key5);
choice=5;
}
}
if(key6==0)
{
delay1ms(10);
if(key6==0)
{
while(!key6);
choice=6;
}
}
switch(choice)
{
case 1:if(an1) power=1;else power=0;break;
case 2:IN1=0;IN2=0;break;
case 3:IN2=0;IN1=1;break;
case 4:TR0=0;IN2=0;PWMZ();break;
case 5:IN1=0;IN2=1;break;
case 6:IN1=0;PWMF();break;
}
}
void main()
{
power=0;
TMOD=0x01;
TH0=0xff;
TL0=0xff;
ET0=1;
EA=1;
while(1)
{
keyscan();
}
}
void time0() interrupt 1
{
TR0=0;
IN2=~IN2;
if(IN2)//���ƽ�}��
{
TH0=0xfc;
TL0=0x18;
}
else//���ƽ�}��
{
TH0=0xf4;
TL0=0x48;
}
}
��(f��)�ƴ��a
����:
�s�s��
�r(sh��)�g:
2018-2-11 19:23
�x�x����
����:
����(l��)��(l��)
�r(sh��)�g:
2020-6-27 19:26
�ܽo���·�D��
�gӭ���R (http://www.zg4o1577.cn/bbs/)
Powered by Discuz! X3.1
��վ֩���ģ�壺
欧美三级电影在线播放
|
日韩在线91
|
97精品国产97久久久久久免费
|
精品少妇v888av
|
国产精品久久久久久婷婷天堂
|
成人区精品一区二区婷婷
|
91麻豆精品国产91久久久更新资源速度超快
|
午夜极品
|
久久久久久国产精品三区
|
91天堂
|
91伊人网
|
在线欧美视频
|
久久久久久久亚洲精品
|
亚洲精品久久久久久久久久久久久
|
午夜免费精品视频
|
日韩视频在线一区
|
中文字幕1区
|
亚洲免费人成在线视频观看
|
在线观看中文字幕视频
|
国产精品视频免费播放
|
www.成人免费视频
|
亚洲福利
|
99久久电影
|
亚洲免费网
|
亚洲精品日本
|
日韩高清国产一区在线
|
欧美freesex黑人又粗又大
|
日本手机在线
|
午夜视频免费在线观看
|
成人免费毛片片v
|
久久精品亚洲精品国产欧美
|
国产精品免费一区二区三区四区
|
欧美成人a∨高清免费观看 91伊人
|
成人黄色av
|
亚洲精品一区在线观看
|
一区二区三区高清不卡
|
久久精品视频12
|
亚洲精品乱码久久久久久黑人
|
黑人巨大精品
|
狠狠ri
|
精品国产乱码久久久久久闺蜜
|