發射系統開始運行時,單片機首先調用程序里面的按鍵掃描子程序,按鍵掃描子 程序不停的掃描 16 個按鍵,檢測是否有按鍵按下,無按鍵按下時,系統處于等待狀 態;一旦有按鍵按下時,單片機根據按鍵值,然后轉入發射子程序,發射子程序根據 預定的要求裝入不同的脈沖個數,然后調制成 40KHz 的載波信號,通過單片機的 P3.5 口發出,為了提高抗干擾和降低能耗,經過三極管放大后然后由紅外發射管想空中發射。
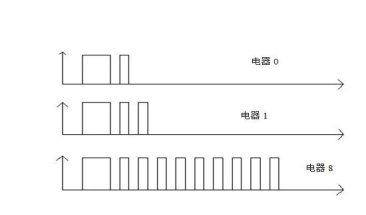
編碼方式是采用碼分編碼,通過不同的脈沖個數來編碼的。不同的脈沖個數代表 不同的編碼,按鍵 0 的編碼的脈沖個數是 2,按鍵1 是 3 個脈沖,依次類推,按鍵 15 是 17 個脈沖。為了接收可靠,第一位碼的碼寬我們設計成 3ms,其余的為 1ms,遙 控的數據幀間大于 10ms。

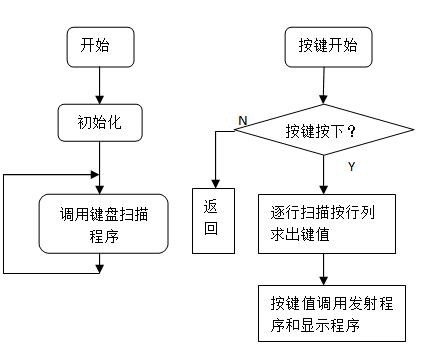
圖 4.3,左邊是發射部分的主程序,先進行初始化,然后執行鍵盤掃描。右邊是 按鍵掃描程序,先是程序不斷掃描鍵盤是否有按鍵按下,如果有按鍵按下,便調用發 射子程序和顯示子程序。


 基于單片機的紅外遙控開關設計.pdf
(1.58 MB, 下載次數: 144)
基于單片機的紅外遙控開關設計.pdf
(1.58 MB, 下載次數: 144)
| 歡迎光臨 (http://www.zg4o1577.cn/bbs/) | Powered by Discuz! X3.1 |