中穎單片機SH88F6161 Demo Code說明及各模塊功能與寄存器配置的詳細教程
1. 概述
1.1 整體框架介紹
1.2 使用實例說明
2. 模塊介紹
2.1. 系統時鐘
2.1.1工作方式配置介紹
2.1.2測試程序介紹
2.1.3寄存器簡要介紹
2.2 I/O端口
2.3 定時器/計數器
2.3.1工作方式配置介紹
2.3.2測試程序介紹
2.3.3相關寄存器介紹
2.4 可編程計數器陣列PCAx
2.4.1工作方式配置介紹
2.4.2測試程序介紹
2.5 LCD/LED驅動器
2.5.1 寄存器簡要介紹
2.6 TWI串行通訊接口
2.6.1工作方式配置介紹
2.6.2 測試程序介紹
2.7 SPI接口
2.7.1工作方式配置介紹
2.7.2 測試程序介紹
2.7.3 寄存器簡要介紹
2.8 Uart接口
2.8.1工作方式配置介紹
2.8.2 測試程序介紹
2.8.3 寄存器介紹
2.9 USB
2.9.1總體流程圖
2.9.2基本通信過程說明
2.10 ADC
2.10.1 工作方式配置介紹
2.10.2 測試程序介紹
2.10.3 寄存器簡要介紹
2.11 DAC
2.11.1 測試程序介紹
2.11.2 寄存器介紹
2.12 EEPROM操作
1.1 整體框架介紹
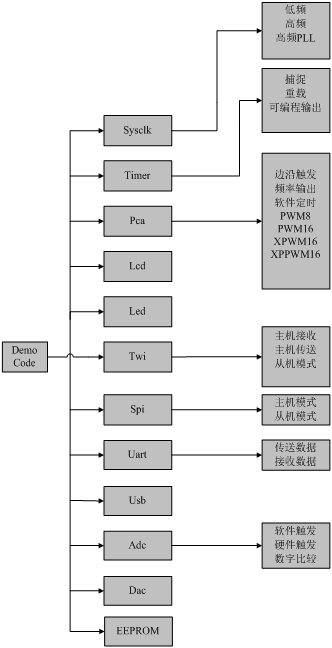
本次提供以下模塊的Demo程序:
圖1-1
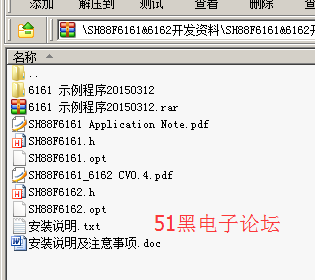
整個工程包含3個文件夾,如下所示:

Source包含.c文件,如下所示:
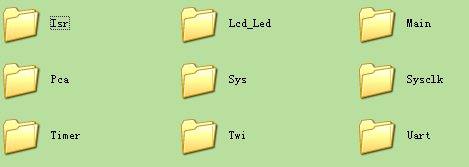
每個模塊包含兩個.c文件,一個命名為xxx..c,一個命名為xxx_Test.c;第一個c文件包含了模塊相關的配置程序,第二個c文件包含了模塊相關的測試程序;
Include中存放各個模塊的頭文件及系統頭文件。
1.2使用實例說明
在Keil中選擇包含相應模塊程序的工程序進行編譯加載,對于有些模塊,因為具有多個工作方式,為了測試不同工作方式下的功能,可在相應模塊的.h文件中打開相應的宏定義,再進行編譯加載;例如,需要測試Timer2工作在方式0捕捉模式的功能,可按如下步驟進行測試:
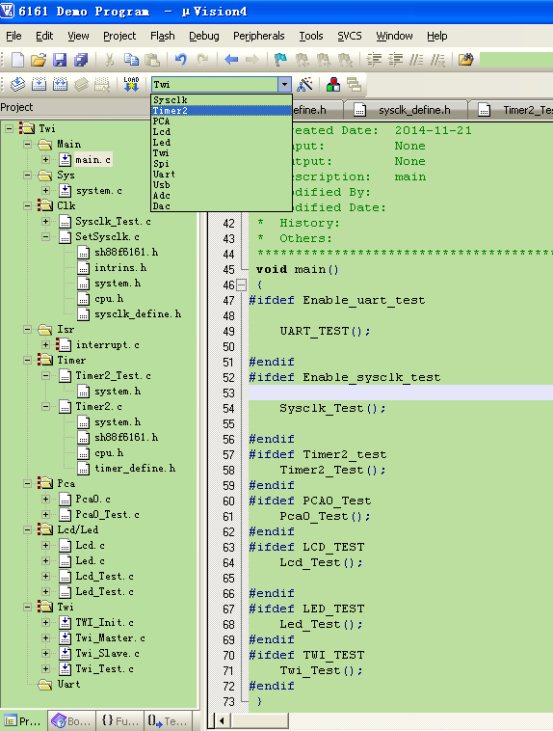
圖1-2
選擇之后,包含Timer2模塊程序的工程被打開,如下圖所示:
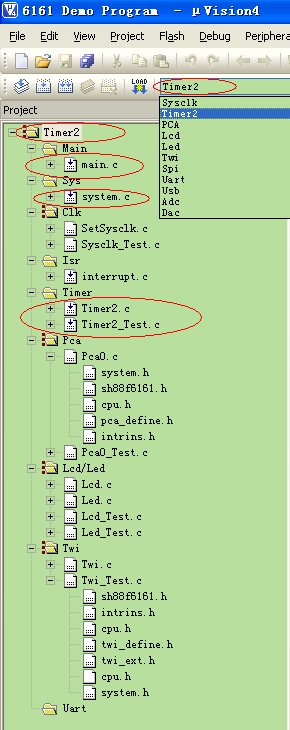
圖1-3
.c文件中帶“”,表示該文件包含在當前工程中,否則不包含在當前工程中。
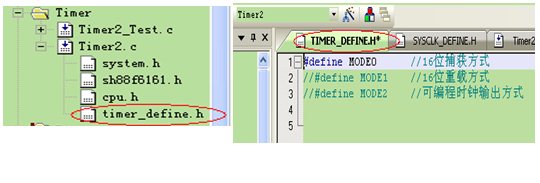
圖1-4
2.1.1工作方式配置介紹
系統時鐘可配置為低頻、高頻,PLL高頻3種模式,sysclk_define.h文件包含以下幾個宏定義,分別用于初始化時鐘在相應的模式:
#define LOW_FREQUENCE:執行函數void SetClk()可將系統時鐘配置為低頻模式; #define HIGH_FREQUENCE:執行函數void SetClk()可將系統時鐘配置為高頻模式; #define PLL_HIGH_FREQUENCE:執行函數void SetClk()可將系統時鐘配置為高頻
PLL模式;
將相應功能的宏定義打開,屏蔽其他宏定義,編譯、加載運行可進行測試。
2.1.2測試程序介紹
選擇“Sysclk”工程,打開宏定義“#define LOW_FREQUENCE”,其它宏定義都屏蔽,設置系統時鐘為低頻時鐘,Option中選擇內建128KHz RC振蕩時鐘作為OSC1CLK;編譯、加載運行,測試P0.0口可得到以下9.1KHz波形:
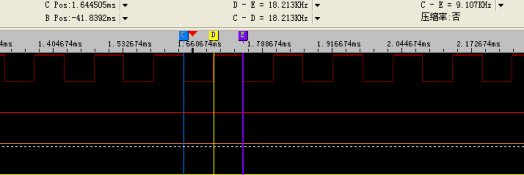
圖2-1
由于c程序中IO翻轉一次需要7個時鐘周期,所以IO翻轉產生的方波頻率應為:
f=128KHz/(7*2)=9.1KHz
注:如果不能觀察到上述結果,則檢查option是否配置正確;
2.1.3寄存器簡要介紹
CLKCON
位編號 | 位符號 | 說明 |
7 | 32K_SPDUP | 32.768KHz振蕩器加速模式控制位 0:32.768kHz振蕩器常規模式, 由軟件清除 1:32.768kHz加速模式,由軟件或者硬件置起 詳細說明見Spec |
6-5 | CLKS[1: 0] | 系統時鐘預分頻器 00:fSYS = fOSC 01:fSYS = fOSC / 2 10:fSYS = fOSC / 4 11:fSYS = fOSC / 12 如果選擇OSC1CLK為SYSCLK時鐘源,則fSYS = fOSC1,與CLKS[1:0]內容無關。 |
3 | OSC2ON | OSC2CLK開關控制寄存器 0:關閉OSC2CLK 1:打開OSC2CLK |
2 | FS | 頻率選擇位 0:選擇OSC1CLK為SYSCLK 1:選擇OSCSCLK為SYSCLK |
PLLCON
位編號 | 位符號 | 說明 |
2 | PLLSTA | PLL狀態位 0:鎖相環沒有鎖住相位 1:鎖相環鎖住相位 鎖相環鎖住相位后可以輸出穩定的時鐘 |
1 | PLLON | PLL開關控制位 0:PLL關閉 1:PLL開啟 PLL開啟必須OSC2ON=1時才有效 |
0 | PLLFS | PLL系統時鐘源控制位 0:PLL不作為OSCSCLK 1:PLL的二分頻作為OSCSCLK PLL的輸入時鐘必須大于5M |
相關內部RC校正寄存器CLKLO、CLKRC0、CLKRC1的詳細說明見Spec。
SH88F6161提供61個位可編程雙向I/O端口,端口數據在寄存器Px中,端口控制寄存器PxCRy控制端口是作為輸入或者輸出。當端口作為輸入時,每個I/O端口帶有由PxPCRy控制的內部上拉電阻。
demo程序中函數void Sysclk_Test(),以IO翻轉為例給出了IO的配置使用方法;
SH88F6161有定時器2和定時器3兩個定時器,定時器2可配置為16位捕獲、16位自動重載、可編程時鐘輸出三種方式;定時器3只可配置為16位自動重載方式。
demo程序以Timer2為例給出了不同工作模式的配置方法。
2.3.1工作方式配置介紹
timer_define.h文件中包含以下幾個宏:
#define MODE0:設置Timer2工作在16位捕獲方式(下降沿捕獲)
#define MODE1:設置Timer2工作在16位重載方式
#define MODE2:設置Timer2工作在可編程時鐘輸出方式
將相應功能的宏定義打開,屏蔽其他宏定義,編譯、加載運行可進行測試。
2.3.2測試程序介紹
選擇“Timer2”工程,依次在timer_define.h文件中打開相應宏,然后進行編譯加載全速運行,觀察現象
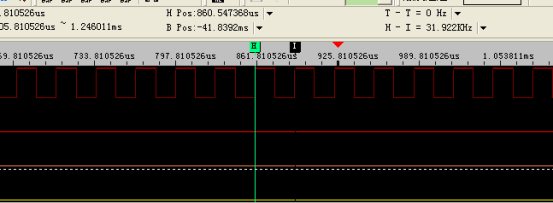
圖2-2
輸出時鐘頻率計算公式:
![]() 、
、
2.3.3相關寄存器介紹
RCAP2L,RCAP2H,TL2,TH2
位編號 | 位符號 | 說明 |
7-0 | RCAP2L [7:0] | 定時器2重載/捕獲數據 |
RCAP2H [7:0] | ||
7-0 | TL2 [7:0] | 定時器2高位低位計數器 |
TH2 [7:0] |
T2CON
位編號 | 位符號 | 說明 |
7 | TF2 | 定時器2溢出標志位 0:無溢出(必須由軟件清0) 1:溢出(由硬件設1) |
6 | EXF2 | T2EX引腳外部事件輸入(下降沿)被檢測到的標志位 0:無外部事件輸入(必須由軟件清0) 1:檢測到外部輸入(如果EXEN2 = 1,由硬件設1) |
3 | EXEN2 | T2EX引腳上的外部事件輸入(下降沿)用作重載/捕獲觸發器允許/禁止控制位 0:忽略T2EX引腳上的事件 1:檢測到T2EX 引腳上一個下降沿,產生一個捕獲或重載 |
2 | TR2 | 定時器2開始/停止控制位 0:停止定時器2 1:開始定時器2 |
1 | C/ | 定時器2定時器/計數器方式選定位 0:定時器方式,T2引腳用作I/O端口 1:計數器方式,內部上拉電阻被打開 |
0 | CP/ | 捕獲/重載方式選定位 0:16位帶重載功能的定時器/計數器 1:16位帶捕獲功能的定時器/計數器 |
T2MOD
位編號 | 位符號 | 說明 |
7 | TCLKP2 | 分頻選擇控制位 0:選擇系統時鐘的1/12作為定時器2的時鐘源 1:系統時鐘作為定時器2的時鐘源 |
1 | T2OE | 定時器2輸出允許位 0:設置P2.4/T2作為時鐘輸入或I/O端口 1:設置P2.4/T2作為時鐘輸出 |
0 | DCEN | 遞減計數允許位 0:禁止定時器2作為遞增/遞減計數器,定時器2僅作為遞增計數器 1:允許定時器2作為遞增/遞減計數器 |
SH88F6161具有四個可編程計數器,分別為PCA0、PCA1、PCA2、PCA3;
demo程序以PCA0為例,給出了其比較/捕捉模塊分別工作于Mode0~Mode3時的參考程序。
2.4.1工作方式配置介紹
pca_define.h文件中包含以下幾個宏:
#define MODE0:配置比較/捕捉模塊0工作在邊沿觸發模式
#define MODE1:配置比較/捕捉模塊0工作在軟件定時方式
#define MODE2: 配置比較/捕捉模塊0工作在頻率輸出方式
#define MODE3_PWM8:配置比較/捕捉模塊0工作在8位脈寬調制
#define MODE3_PWM16:配置比較/捕捉模塊0工作在16位脈寬調制
#define MODE3_XPWM16:配置比較/捕捉模塊0工作在16位相位修正脈寬調制
#define MODE3_XPPWM16:配置比較/捕捉模塊0工作在16位相頻修正脈寬調制
將相應功能的宏定義打開,屏蔽其他宏定義,編譯、加載運行可進行測試。
2.4.2測試程序介紹
選擇“PCA”工程,依次在pca_define.h文件中打開相應宏,然后進行編譯加載全速運行,觀察現象;
1. 打開宏“#define MODE0”,屏蔽其他宏定義,編譯加載后,全速運行,P0CEX0引腳上升沿/下降沿會觸發一次捕捉,并產生相應中斷;
2. 打開宏“#define MODE1”,屏蔽其他宏定義,編譯加載后,全速運行,可以實現連續軟件定時,當PCA0計數值與P0CPH0和P0CPL0中的值匹配時產生一次中斷,同時P0CEX0口翻轉一次;(PxTOP,PxCPn可變)
3. 打開宏“#define MODE2”,屏蔽其他宏定義,編譯加載后,全速運行,P0CEX0引腳可輸出如下波形(3.965KHz):
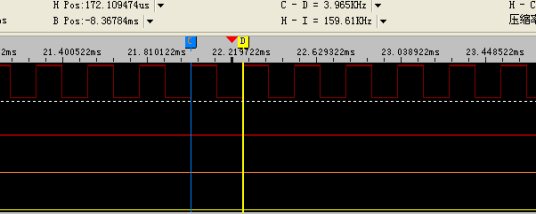
圖2-3
FPxCEXn= FPCAx /(2 × PxCPHn)
如果應用中需要改變波形占空比和頻率,則可通過適時地改變PxCPHn來獲得相應的波形;PxTOPL固定為0xFF,用戶可以配置PxTOPH來改變計數最大值;
4. 打開宏“#define MODE3_PWM8”,屏蔽其他宏定義,編譯加載后,全速運行,P0CEX0輸出占空比為0.8的正向波形,P0CEX1輸出占空比為0.8的反向波形,如下圖所示:
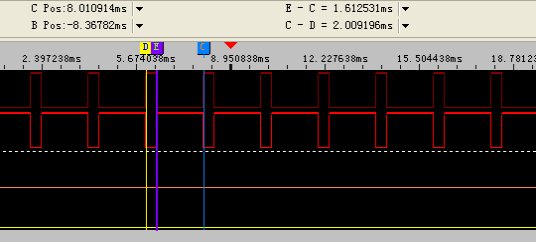
圖2-4
Duty=(256-(PxCPHn+1))/256
如果應用中需要Duty可變的PWM波形,則可通過適時的改變PxCPHn來獲取希望波形;
PxTOPL不可改變;
5. 打開宏“#define MODE3_PWM16”,屏蔽其他宏定義,編譯加載后,全速運行,P0CEX0輸出占空比為0.8的正向波形,P0CEX1輸出占空比為0.8的反向波形,如下圖所示:
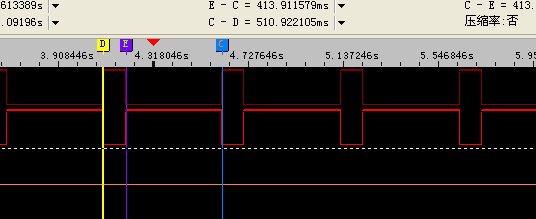
圖2-5
Duty=(65536-(PxCPn+1))/65536
如果應用中需要Duty可變的PWM波形,則可通過適時的改變PxCPn(PxCPHn,PxCPLn)和PxTOP來獲取希望波形;
6. 打開宏“#define MODE3_XPWM16”,屏蔽其他宏定義,編譯加載后,全速運行,P0CEX0輸出頻率為250Hz的正向波形,P0CEX1輸出頻率為250Hz的反向波形,如下圖所示:
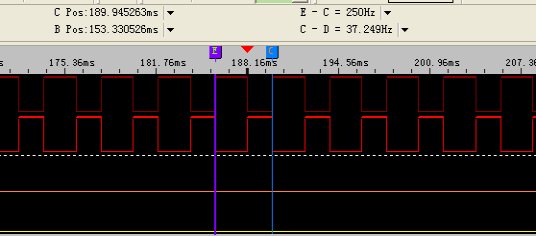
圖2-6
如果應用中需要頻率和占空比可變的波形,則可通過適時的改變PxTOP和PxCPn(PxCPHn,PxCPLn)來獲取相應波形;在一個定時器時鐘周期里PCAx值等于PxTOP值,然后在下一次計數到來時PxTOP和PxCPn將得到更新。
7. 打開宏“#define MODE3_XPPWM16”,屏蔽其他宏定義,編譯加載后,全速運行,P0CEX0輸出頻率為250Hz的正向波形,P0CEX1輸出頻率為250Hz的反向波形,如下圖所示:
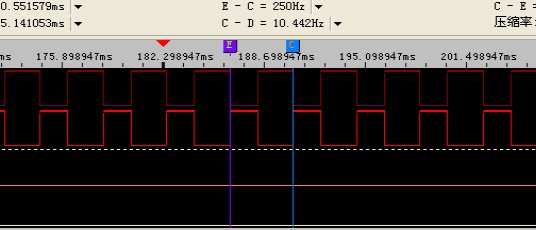
圖2-7
如果應用中需要頻率和占空比可變的波形,則可通過適時的改變PxTOP和PxCPn(PxCPHn,PxCPLn)來獲取相應波形;PxCPn和PxTOP在0x0000點更新。
注:對于XPWM和XPPWM工作方式,一定要配置相應的PCAx工作在雙沿模式,否則相應口將不能正常輸出波形;
Demo程序給出了LCD的使用實例,以4COM,2SEG為例,用戶可根據實際需要選擇合適COM數和SEG數做相應的IO配置;配置參考void init_lcd()。
選擇“Lcd”工程,編譯加載運行,觀察SEG1、SEG2、COM1~COM4口波形;
Demo程序給出了LED的使用實例,以2COM,8SEG為例,用戶可根據實際需要選擇合適COM數和SEG數做相應的IO配置;配置參考void init_led()。
選擇“Led”工程,編譯加載運行,觀察COM1、COM2、SEG1~ SEG8口波形;
2.5.1寄存器簡要介紹
DISPCON
位編號 | 位符號 | 說明 |
7 | DISPSEL | LCD,LED選擇控制位 0:選擇LCD驅動器,LED驅動器無效 1:選擇LED驅動器,LCD驅動器無效 |
6 | DISPON | LCD使能控制位 0:禁止LCD驅動器 1:允許LCD驅動器 |
5-4 | DUTY[1:0] | LCD占空比選擇位 00:1/4占空比,1/3偏置 01:1/5占空比,1/3偏置 1X:1/6占空比,1/3偏置 |
3-0 | VOL[3:0] | LCD對比度控制位 0000:VLCD = 0.531VDD 0001:VLCD = 0.563VDD 0010:VLCD = 0.594VDD 0011:VLCD = 0.625VDD 0100:VLCD = 0.656VDD 0101:VLCD = 0.688VDD 0110:VLCD = 0.719VDD 0111:VLCD = 0.750VDD 1000:VLCD = 0.781VDD 1001:VLCD = 0.813VDD 1010:VLCD = 0.844VDD 1011:VLCD = 0.875VDD 1100:VLCD = 0.906VDD 1101:VLCD = 0.938VDD 1110:VLCD = 0.969VDD 1111:VLCD = 1.000VDD |
DISPCON1
位編號 | 位符號 | 說明 |
4 | RLCD | LCD偏置電阻選擇控制位 0:LCD偏置電阻為225k 1:LCD偏置電阻總和為900k |
3-2 | FCCTL[1:0] | 充電時間控制位 00:1/8 LCD com周期 01:1/16 LCD com周期 10:1/32 LCD com周期 11:1/64 LCD com周期 充電時間控制位僅在快速充電模式下有效 |
1-0 | MOD[1:0] | 驅動模式選擇位 00:傳統電阻型模式,偏置電阻總和為225k/900k 01:傳統電阻型模式,偏置電阻總和為60k 1X:快速充電模式,偏置電阻總和自動在60k和225k/900k之間切換 |
其它相關寄存器詳見Spec。
TWI串行總線采用兩根線(SDA和SCL)在總線和裝置之間傳遞信息。SH88F6161完全符合TWI總線規范,自動對字節進行傳輸進行處理,并對串行通訊進行跟蹤。
2.6.1工作方式配置介紹
twi_define.h文件中定義了以下幾個模式:
#define MT_MODE:打開該宏,配置6161工作在主機傳送模式;
#define MR_MODE:打開該宏,配置6161工作在主機接收模式;
#defineSLAVE_MODE:打開該宏,配置6161工作在從機模式;
將相應功能的宏定義打開,屏蔽其他宏定義,編譯、加載運行可進行測試。
2.6.2測試程序介紹
Twi_Test.c分別以作為主機和從機傳送和接收10個byte數據為例給出了該模塊的應用;
1. 選擇“Twi”工程后,打開宏定義“MT_MODE”,編譯、加載運行可測試6161作為主機向從機傳送數據,分別為“0x40,0x41,0x42,0x43,0x44,0x45,0x46,0x47,0x48,0x49,0x4A……..”
2. 選擇“Twi”工程后,打開宏定義“MR_MODE”,編譯、加載運行可測試6161作為主機從從機接收10個byte數據;
3. 選擇“Twi”工程后,打開宏定義“SLAVE_MODE”,編譯、加載運行可測試6161作為從機:
串行外部設備接口(SPI)是一種高速串行通信接口,允許MCU與外圍設備(包括其它MCU)進行全雙工,同步串行通訊。
2.7.1工作方式配置介紹
spi_define.h文件中定義了以下兩個模式:
#define SLAVE_MODE:打開該宏,配置6161作為從機;
#define MASTER_MODE:打開該宏,配置6161作為主機;
2.7.2測試程序介紹
以6161作為主機向另一塊作為從機的6161傳送數據為例,具體過程如下:
主機6161向從機6161傳送“0x40, 0x41,0x42,0x43,0x44,0x45,0x46,0x47,0x48,0x49,0x4A”;從機收到主機發送的數據后,將相應數據返回給主機,主機接收到從機返回的數據后,將其保存到rcv_data[]數組中。
選在“Spi”工程后,打開宏定義“#define MASTER_MODE”編譯,下載運行使其作為主機;
選在“Spi”工程后,打開宏定義“#define SLAVE_MODE”編譯,下載運行使其作為從機;
本模塊程序運行測試需要兩塊6161板子配合。
注:如果從機向主機返回的數據內容與期望值有差別,可嘗試提高從機的的系統時鐘頻率,或降低主機的系統時鐘頻率;
本次實例中,以一個主設備一個從設備的通訊網絡為例,因此無需控制SS引腳,即只需接SCK,MOSI,MISO三根信號線;
2.7.3寄存器簡要介紹
位編號 | 位符號 | 說明 |
7 | DIR | 傳送方向選擇位 0:MSB優先發送 1:LSB優先發送 |
6 | MSTR | SP設備選擇位 0:配置SPI作為從屬設備 1:配置SPI作為主設備 |
5 | CPHA | 時鐘相位控制位 0:SCK周期的第一沿采集數據 1:SCK周期的第二沿采集數據 |
4 | CPOL | 時鐘極性控制位 0:在Idle狀態下SCK處于低電平 1:在Idle狀態下SCK處于高電平 |
3 | SSDIS | 引腳控制位 0:在主和從屬模式下,打開引腳 1:在主和從屬模式下,關閉引腳 如果SSDIS置1,不產生MODF中斷請求。 在從屬模式下,如果CPHA = 0,該位不起作用。 |
2-0 | SPR [2:0] | 串行外部設備時鐘速率選擇位 000: fSYS /2 001: fSYS /4 010: fSYS /8 011: fSYS /16 100: fSYS /32 101: fSYS /64 110: fSYS /128 111: fSYS /256 |
位編號 | 位符號 | 說明 |
7 | SPEN | SPI控制位 0:關閉SPI 1:打開SPI接口. |
6 | SPIF | 串行外部設備數據傳送標志位 0:由軟件清0 1:表明已完成數據傳輸,由硬件置1 |
5 | MODF | 模式故障位 0:由軟件清0 1:表明引腳電平與SPI模式不一致,由硬件置1 |
4 | WCOL | 寫入沖突標志位 0:有軟件清0,表明已處理寫入沖突 1:由硬件置1,表明檢測到一個沖突 |
3 | RXOV | 接收超限位 0:表明已處理接收超限,由軟件清0 1:表明已檢測到接收超限,由硬件置1 |
位編號 | 位符號 | 說明 |
7-0 | SPDAT [7:0] | 寫入SPDAT的數據被放置到發送移位寄存器中。讀取SPDAT時將獲得接收移位換寄存器的數據。 |
SM0 | SM1 | 方式 | 類型 | 波特率 | 幀長度 | 起始位 | 停止位 | 第9位 |
0 | 0 | 0 | 同步 | fSYS/(4或12) | 8位 | 無 | 無 | 無 |
0 | 1 | 1 | 異步 | 自帶波特率發生器的溢出率/16 | 10位 | 1 | 1 | 無 |
1 | 0 | 2 | 異步 | fSYS/(32或64) | 11位 | 1 | 1 | 0,1 |
1 | 1 | 3 | 異步 | 自帶波特率發生器的溢出率/16 | 11位 | 1 | 1 | 0,1 |
通過配置相應寄存器可使Uart工作在不同的工作方式,本次Demo程序以Uart0的方式1為例,給出了6161傳送數據和接收數據的實例。
注:Uart0和Uart1完全相同;
2.8.1工作方式配置介紹
uart_define.h文件中,定義了以下兩個宏:
#define Enable_uart_TX_test:測試6161工作在方式1傳送數據;
#define Enable_uart_RX_test:測試6161工作在方式1接收數據;
2.8.2測試程序介紹
本項測試需結合串口助手調試,選擇“Uart”工程后,打開宏定義“#define Enable_uart_TX_test”,編譯、加載運行后,通過串口助手可看到6161連續傳送0x96;
注:測試時,系統時鐘選擇外掛晶振8M,波特率為9600;
2.8.3寄存器介紹
位編號 | 位符號 | 說明 |
7 | SMOD | UART0/1波特率加倍器 0:在方式2中,波特率為系統時鐘的1/64 1:在方式2中,波特率為系統時鐘的1/32 |
6 | SSTAT | SCON[7:5]功能選擇 0:SCON[7:5]工作方式作為SM0,SM1,SM2 1:SCON[7:5]工作方式作為FE,RXOV,TXCOL |
3-2 | GF[1:0] | 用于軟件的通用標志位 |
1 | PD | 掉電模式控制位 |
0 | IDL | 空閑模式控制位 |
位編號 | 位符號 | 說明 |
7-6 | SM[0:1] | EUART0串行方式控制位,SSTAT = 0 00:方式0,同步方式,固定波特率 01:方式1,8位異步方式,可變波特率 10:方式2,9位異步方式,固定波特率 11:方式3,9位異步方式,可變波特率 |
7 | FE | EUART0幀出錯標志位,當FE位被讀時,SSTAT位必須被置位 0:無幀出錯,由軟件清零 1:幀出錯,由硬件置位 |
6 | RXOV | EUART0接收溢出標志位,當RXOV位被讀時,SSTAT 位必須被置位 0:無接收溢出,由軟件清零 1:接收溢出,由硬件置位 |
5 | SM2 | EUART0多處理機通訊允許位(第9位“1”校驗器),SSTAT = 0 0:在方式0下,波特率是系統時鐘的1/12 在方式1下,禁止停止位確認檢驗,任何停止位都會置位RI 在方式2和3下,任何字節都會置位RI 1:在方式0下,波特率是系統時鐘的1/4 在方式1下,允許停止位確認檢驗,只有有效的停止位(1)才能置位RI 在方式2和3下,只有地址字節(第9位 = 1)才能置位RI |
5 | TXCOL | EUART0發送沖突標志位,當TXCOL位被讀時,SSTAT位必須被置位 0:無發送沖突,由軟件清零 1:發送沖突,由硬件置位 |
4 | REN | EUART0接收器允許位 0:接收禁止 1:接收允許 |
3 | TB8 | 在EUART0的方式2和3下發送的第9位,由軟件置位或清零 |
2 | RB8 | 在EUART0的方式1,2和3下接收的第9位 在方式0下,不使用RB8 在方式1下,如果接收中斷發生,停止位移入RB8 在方式2和3下,接收第9位 |
1 | TI | EUART0的傳送中斷標志位 0:由軟件清零 1:由硬件置位 |
0 | RI | EUART0的接收中斷標志位 0:由軟件清零 1:由硬件置位 |
位編號 | 位符號 | 說明 |
7-0 | SBUF[7:0] | 這個寄存器尋址兩個寄存器:一個移位寄存器和一個接收鎖存寄存器 SBUF的寫入將發送字節到移位寄存器中,然后開始傳輸 SBUF的讀取返回接收鎖存器中的內容 |
位編號 | 位符號 | 說明 |
7-0 | SADDR[7:0] | 寄存器SADDR定義了EUART0的從機地址 |
7-0 | SADEN[7:0] | 寄存器SADEN是一個位屏蔽寄存器,決定SADDR的哪些位被檢驗 0:SADDR中的相應位被忽略 1:SADDR中的相應位對照接收到的地址被檢驗 |
位編號 | 位符號 | 說明 |
7 | SBRTEN | EUART0波特率發生器使能控制位 0:關閉(默認) 1:打開 |
6-0, 7-0 | SBRT[14:0] | EUART0波特率發生器計數器高7位和低8位寄存器 |
位編號 | 位符號 | 說明 |
3-0 | SFINE[3:0] | EUART0波特率發生器微調數據寄存器 |
USB主機和從機之間的通信是建立在既定的USB協議基礎上,需要主機驅動程序和從機驅動程序配合實現;根據不同的應用場合,用戶可以編寫相應的USB驅動程序實現與PC主機的通訊。
USB協議規定了USB設備和PC主機進行通訊的過程,主機和從機進行通訊的第一個階段是枚舉過程,通過枚舉,從機設備會將其描述符信息發送給主機,主機會在枚舉完之后根據設備的描述符信息發起后續的通信,后續通信的過程根據枚舉時得到的設備配置信息的不同而不同。
2.9.1總體流程圖
使用USB模塊之前,首先需調用模塊初始化函數void usb_init (),之后USB從機將等待主機發送命令,并產生相應中斷;
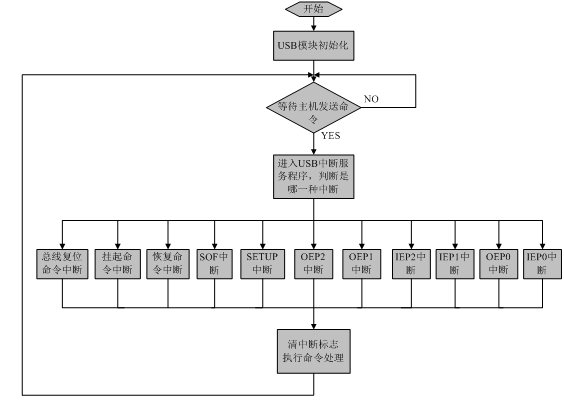
圖2-8
2.9.2基本通信過程說明
如果從機可以接收主機向控制端點0發送的數據,收到SETUP命令后,需進行如下操作:
如果從機有數據通過端點0向主機發送,收到SETUP命令后,需執行如下操作:
如果從機可以接收主機向端點1傳送的數據,則需執行如下操作:
如果從機有數據通過端點1向主機發送,則需執行如下操作:
如果從機可以接收主機向端點2傳送的數據,則需執行如下操作:
如果從機有數據通過端點2向主機發送,則需執行如下操作:
2.9.3應用實例
本次Demo程序以HID類設備為例,給出了枚舉過程。

當6161下載該程序運行后,插入PC,PC端會識別到一個HID類設備插入,如下所示:
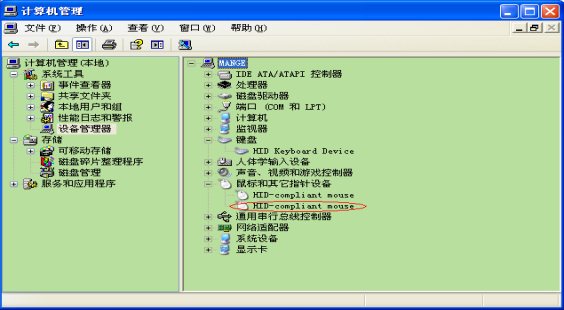
如果用戶需要實現其他應用,則應根據USB協議規定修改相應的描述符信息,并增加相應的類請求響應程序以及后續通信相關程序。
ADC負責模擬信號到相應12位的數字信號的轉換,支持VDD,內建1.5V,內建2.5V,外接VREF四種基準電壓,可通過軟件啟動AD轉換,也可通過觸發源觸發AD轉換,另外通過啟動比較功能,可實現連續轉換。
2.10.1工作方式配置介紹
adc_define.h文件中定義了以下幾個宏:
#define STARTUP_BY_SOFTWARE:打開該宏,測試軟件觸發一次ADC0轉換
#define STARTUP_BY_HARDWARE:打開該宏,測試外部中斷2上升沿觸發ADC0轉換
#define DIGITAL_COMPARE_FUNCTION:打開該宏,測試連續ADC0轉換
2.10.2測試程序介紹
選擇“Adc”工程,打開宏“#define STARTUP_BY_SOFTWARE”,編譯、加載,
注:本項測試只完成一次AD轉換,要想再進行一次AD轉換,軟件需再次啟動AD轉換。
選擇“Adc”工程,打開宏“#define STARTUP_BY_HARDWARE”,編譯、加載,
注:本項測試中,一次外部中斷只能觸發一次AD轉換,要想再進行一次AD轉換,需再次觸發外部中斷。
選擇“Adc”工程,打開宏“#define DIGITAL_COMPARE_FUNCTION”,編譯、加載,
2.10.3寄存器簡要介紹
功能 | 名稱 | 寄存器描述 |
ADC時鐘設置 | ADT | 設置ADC時鐘與采樣時間、ADC精度模式選擇 |
ADC控制 | ADCON1 | AD模塊使能、啟動、比較使能、及轉換完成中斷標志、觸發源使能、事件觸發設置 |
ADCON2 | 中斷使能、基準源控制、上/下限比較設置 | |
ADC結果寄存器 | ADCL | SCH中指定通道轉換值的低位 |
ADCH | SCH中指定通道轉換值的高位 | |
上限比較寄存器 | ADCGTL | 上限比較寄存器的低位 |
ADCGTH | 上限比較寄存器的高位 | |
下限比較寄存器 | ADCLTL | 下限比較寄存器的低位 |
ADCLTH | 下限比較寄存器的高位 | |
通道寄存器 | SCHCON1 | 參考電壓設置、通道設置、結果寄存器格式配置 |
SCHCON2 | 通道0~7端口共享寄存器 | |
SCHCON3 | 通道8~11端口共享寄存器 |
寄存器的每一位詳細介紹見Spec。
DAC支持自校準功能,在精度要求較高的情況下,需先進行自校準,然后再正常使用DAC。
2.11.1測試程序介紹
選擇工程“Dac”,編譯、加載運行,測量DAC輸出口(P1.6)電壓約為2.5V;
注:本次測試程序選擇DACL執行寫操作觸發DAC輸出更新,選擇內建2.5V作為參考電壓,且輸入數字量為0xFFF,故轉換輸出電壓應該為2.5V。
實際應用中,可根據需要在初始化DAC時選擇其他觸發方式或決定是否開啟DAC補償。
2.11.2寄存器介紹
位編號 | 位符號 | 說明 |
7 | DACEN | DAC轉換控制位 0: DAC 禁止 1: DAC使能 |
6-5 | DACOSEL[1:0] | DAC輸出驅動選擇: 00:DAC輸出不帶緩沖器. 01:DAC輸出帶緩沖器(1倍) 1x:DAC輸出帶緩沖器(3倍) |
4-3 | DACLSEL[1:0] | 鎖存器觸發源選擇 00: DACL執行寫操作觸發DAC輸出更新 01: 定時器2溢出觸發DAC輸出更新 10: 定時器3溢出觸發DAC輸出更新 11: PCA0定時器溢出觸發DAC輸出更新 |
2 | DACDF | DAC的數據格式 0: 二進制 1: 二進制補碼 |
1 | DACIO | DAC端口配置寄存器 0:P1.6作為為IO口 1:P1.6作為DAC輸出口 |
0 | DACIF | DAC中斷標志位 0:DAC轉換未完成. 1:DAC轉換完成,由硬件置1,軟件清0 |
位編號 | 位符號 | 說明 |
7 | DACCALON | DAC自校準操作控制(當DACOSEL[1:0] = 01或1x時,自校準功能有效) 0: 自校準關閉(自校準完成,硬件清零) 1: 自校準開啟(軟件開啟) |
6 | OFFSETSW | DAC補償開關 0: 開啟DAC補償 1: 關閉DAC補償 |
4 | VREFS | 外部參考電壓輸入口選擇 0:P1.4作為I/O口 1:P1.4作為VREF輸入引腳 |
3 | REFSEL | 內建電壓選擇: 0:內建2.5V 1:內建1.5V (內建電壓切換需要1ms的穩定時間) |
2 | REFON | 內建1.5V/2.5V開關: 0:內建1.5V/2.5V關(P1.5作為I/O口) 1:內建1.5V/2.5V開(P1.5作為內部參考電壓輸出引腳) (內建電壓開啟需要1ms的穩定時間) |
1-0 | DACSREF[1:0] | DAC的參考源選擇: 00: 選擇VDD為基準電壓 01: 選擇外部VREF端口輸入為基準電壓 1x: 選擇內建電壓1.5V/2.5V為基準電壓 (DACSREF選擇內建電壓1.5V/2.5V時,確保REFON = 1,REFSEL選擇需要的內建電壓) |
位編號 | 位符號 | 說明 |
7 | OFFSETSIGN | DAC自校準補償電壓數據符號位: 0:正(轉換值比實際的值大) 1:負(轉換值比實際的值小) |
5-0 | OFFSETDATA[5:0] | DAC自校準補償電壓數據 (DAC自校準完成,根據校準結果更新此寄存器。 當OFFSETSW = 0時,實際DAC的輸出是DACH:DACL與OFFSETDATA經過運算后的輸出值,以便DAC輸出精度更高 當OFFSETSW = 1時,DAC的輸出為DACH:DACL對應的模擬電壓) |
注:該寄存器,在執行DAC自校準功能時,硬件會自動更新;另外,軟件也可修改該寄存器,如,通常為了提高精度,軟件會對多次自校準后得到的DACCAL值求平均,然后再將其寫入DACCAL。
位編號 | 位符號 | 說明 |
3-0 7-0 | DAC [11:0] | DAC數據 位3~0是12位DAC數據字的高4位。 位7~0是12位DAC數據字的低8位。 |
本次Demo程序給出了讀寫EEPROM的接口函數,如下:
1)UINT8 EEPromByteRead(UINT8 nAddrH,UINT8 nAddrL)
從EEPROM指定地址處讀取1個byte;
2)void EEPromByteProgram(UINT8 nAddrH,UINT8 nAddrL, UINT8 nData)
向EEPROM指定地址處寫一個byte;
3)void EEPromSectorErase(UINT8 nAddrH)
擦除EEPROM指定扇區中內容;
注:在對EEPROM進行擦除和寫操作之前,一定要關閉中斷,待操作結束后,才可打開中斷;另外,對Flash的讀、寫、擦除操作過程類似于類EEPROM操作,唯一區別是,在擦除或寫、讀之前應將FAC位清0。
| 歡迎光臨 (http://www.zg4o1577.cn/bbs/) | Powered by Discuz! X3.1 |