|
發布時間: 2019-7-12 09:46
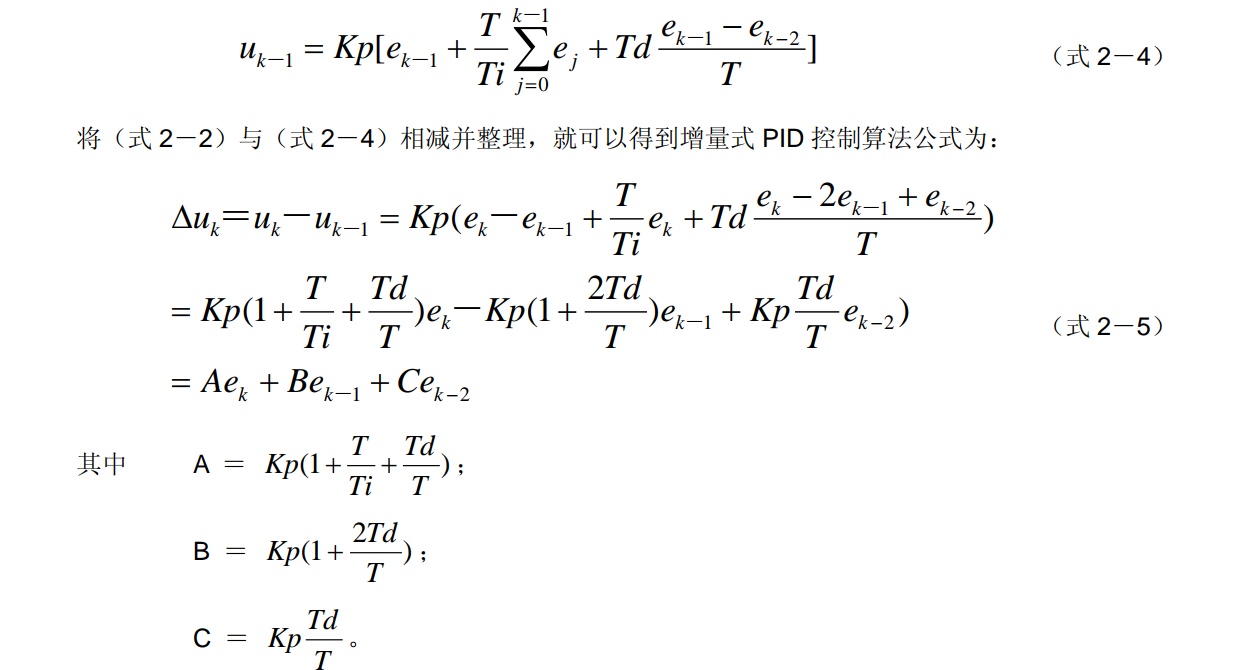
正文摘要:本帖最后由 kaixuan520 于 2019-7-12 10:04 編輯 位置式PID控制 位置式PID控制是指在積分環節,對從0時刻到當前時刻的所有偏差進行積分,是非遞推式的全局積分。 增量式PID控制 和位置式PID控制不同,增量式PI ... |
| 樓主,輸入捕獲中斷函數里面的ICV1和ICV2為什么分別是周期和占空比啊 |
| 資源不錯 |
學習了,謝謝大佬分享 |
| 請問大佬,程序里用于捕獲的定時器只使能了通道1,為什么還能用通道2采集占空比呢? |
13958988573 發表于 2019-8-1 10:03 沒用到,代碼都在main.c里 |
| 沒有PID.c文件 |
18239311863 發表于 2019-7-17 17:43 沒有電路圖,電路自己設計的只有編碼器那塊的,電路圖在貼子中,別的連接都是杜邦線直接連的 |
| 電路圖提供一下唄 |
| 很好的學習資料,在學習平衡小車,研究下 |
小林大哥哥 發表于 2019-7-14 20:52 VO是PID計算出的結果,MO是當前輸出PWM的占空比 |
|
求大佬解釋 |
| VO:%d,MO:%d這兩個參數表示pid的啥 |
 收藏
收藏 頂
頂 踩
踩

