|
�l(f��)���r(sh��)�g: 2020-8-7 09:32
����ժҪ:�������һ��(g��)����ADXL345���Ԅ�(d��ng)��ʾ�x܇ɽ��܇β���Įa(ch��n)Ʒ,Ӳ���������˴�ŵ�ԭ������ͨ�^�z�y(c��)һ��(g��)�S���ٶȁ��Д��Л]���ڄx܇ �F(xi��n)���І��}��:Ҫͨ�^��ô�ӵ��㷨���Д��@��(g��)�x܇�c��?���ǎׂ�(g��)�㷨,�����^���P(gu��n)���ܷ� ... |
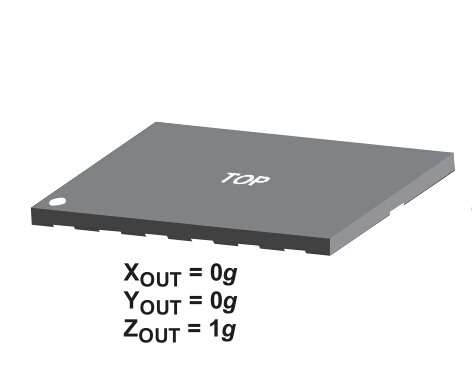
Y_G_G �l(f��)���� 2020-8-7 21:48 �ţ������쿴��һ���@��(g��)оƬ���Y�ϡ� Մһ�¸��h(yu��n)���뷨�� ��������������Ժ��·����Ҫ����������(n��i)ƽ�ŵģ������������(du��)ˮƽ���ã�Z�S��Gֵ�Ͳ���(hu��)��1��(g��)G�����ܕ�(hu��)С��1��(g��)G�� ��܇�Ŀ�ʽ��ͬ����(d��o)�����Ε�(hu��)���в�ͬ�� �������b�ú������Ҫ�{(di��o)ˮƽ��B(t��i)����?y��n)�ֻ����ˮƽ��B(t��i)�������������(zh��n)����ô�@���ǂ�(g��)ȱ���ˡ� �������룬 �������Ҫ�ؽ�һ��(g��)����(du��)����(bi��o)ϵ���_�C(j��)��һ�������Ǚz�y(c��)�Ă�(g��)̓�M����(bi��o)��Z�S��1��(g��)G�� Ȼ��_���A�ǣ��㷨��(y��ng)ԓ�ЬF(xi��n)�ɵģ����^Ӌ(j��)������(hu��)���c(di��n)���ܵ��ü�16λ����оƬ�����ˡ� ���⣬оƬƽ�ŕr(sh��)��������ˮƽ�\(y��n)��(d��ng)����Ҫ�y(c��)Z�S��(sh��)��(j��)�� �y(c��)һ��(g��)X�S������Y�S��(sh��)��(j��)ԇԇ����(sh��)��(j��)׃��(d��ng)���ȕ�(hu��)�����@�� |
robinsonlin �l(f��)���� 2020-8-7 17:48 ���º������r(sh��)�w�뻬���@һ�(xi��ng)����,���r(sh��)ֻȡһ��(g��)�S�Ĕ�(sh��)��(j��),������е�Ԓ��ʡ��ȥ�xȡXYZ����(g��)�S�Ĕ�(sh��)��(j��)�� ���x����,�ҵ��Ǜ]�п��]�����ٶ��^�̵Ĝp��,���^�ٸĸ� �F(xi��n)��ֻ�������k�������������Ҕ[�[ԇһ��,С��һС��ͣ��Ҳ����������ʾ�� ����߀���]һ�¼����^���Мp�ٵĆ��} |
Y_G_G �l(f��)���� 2020-8-7 15:06 �x܇�Ġ�B(t��i)���_��(sh��)�nj�(du��)��(y��ng)Gֵ�ĸ�׃����ǰ��������nj�(du��)�ģ�����Ĵ_��(sh��)����ȫ���_�� ֻҪ�м��ٶȣ��ٶȾ͕�(hu��)��׃���o(w��)Փ��ؓ(f��)���������ֵ�r(sh��)���ڼ��٣���ô��ؓ(f��)ֵ�r(sh��)�������ڜp�١� ��(d��ng)���ٶȞ�0�r(sh��)���ٶȲ��Ǻ㶨�ġ� �@��(g��)�r(sh��)�������B(t��i)�Dz����κ��������ġ� ��(sh��)�H�ϣ�����(hu��)�ܵ�Ħ�����Ϳ՚��������@�Ō�(d��o)���㻬�еĆ�܇��(hu��)ͣ���� Z�S��(du��)��(y��ng)�Ġ�B(t��i)��(y��ng)ԓ�Ǽ��١����٣�Gֵ��0�����p������(g��)��B(t��i)�� �oֹ?f��n)�B(t��i)����(sh��)�H��Ҳ��һ�N���٠�B(t��i)�� ���ԣ��x܇�İl(f��)��һ�����Ђ�(g��)����Ħ�����Ϳ՚������� ���a(ch��n)���ˣ��ŕ�(hu��)��(d��o)�x܇�� ���ԣ��������˼·����������еĆ�܇����(hu��)��Z�S��ݔ��һ��(g��)��̖(h��o)��ֻҪ����ƽ·�ϻ��У��@��(g��)��̖(h��o)�϶���ƽ���f�p��̖(h��o)���ڻ����^���У��@��(g��)�f�p��̖(h��o)ͻȻ���ſ����Д����Єx܇�� �f�p�֏�(f��)ԭ�������ʣ����DŽx܇��ʧ�ˡ� ��̖(h��o)��0�����dž�܇ͣ���ˡ� ����ֻ��Ԕ��(x��)�f�˻����^���еĄx܇��r��߀�м����^�̄x܇�������^�̄x܇�����x܇�������x܇���Լ���·�oֹ�x܇����(y��ng)ԓ������ͨ�^�����xȡ����B(t��i)�ġ���������Ԝy(c��)ԇ���ȴ���Ĝy(c��)ԇ�Y(ji��)���� ���m(x��)�P(gu��n)ע����M(j��n)չ�� |
robinsonlin �l(f��)���� 2020-8-7 12:00 �䌍(sh��)�]����ô��(f��)�s�� ��ֻȡһ��(g��)�S�Ĕ�(sh��)��(j��),����Z�S,β���NJA�چ�܇�����,��Ȼ��β������һ���������,��ô,Z�S�ķ���Ҳ�ǹ̶��� ��ô,��(du��)��Z�S,��ֻ�м��ٶ�,�oֹ�͜p�ٶ����N��B(t��i)�� ���һֱ����,������һֱ��ݔ��0.5G�Ĕ�(sh��)��(j��),�Ǿ��f����һֱ���@��(g��)��B(t��i),���]�м��ٶ� �����һ�r(sh��)�g��ݔ��0.5G,��һ��(g��)�r(sh��)�gݔ��0.9G,��ô,���J(r��n)�����Ǽ��ٶ��� �F(xi��n)�ڵĆ��}��Ҫ���@��(g��)ȡ�ӵĕr(sh��)�g���㷨,���@һ�K�]�н�(j��ng)�(y��n),����e��ȡ�c(di��n)��(j��ng) ��K�Y(ji��)��߀��Ҫ�چ�܇�Ϝy(c��)ԇ���е��� |
|
��������� robinsonlin �� 2020-8-7 14:44 �� ��ƽ���ϣ�F(xi��n)1��һ��(g��)���m(x��)���ڵ�Ħ��������ֻ�Ю�(d��ng)F1�������ͻȻ�����@��(g��)Ħ�������r(sh��)���ſ������в�܇���О�l(f��)���� ���Կ�����Ҫһ��(g��)����(sh��)ȥӋ(j��)���@��(g��)F1��������׃���Dz���ƽ���ġ� ���m(x��)�Д࣬���m(x��)���^�ɣ�������Ҫ��(sh��)�Hȥ�y(c��)����ȡһ��(g��)��������ֵ�����|�l(f��)�c(di��n)�� ���µ��ϣ��䌍(sh��)Ҳ�����Д࣬�@��(g��)�Д���(y��ng)ԓ���ڵ�һ��(j��)�����µ��ϕr(sh��)������G�ֽ��G1 ��G2�� G1��GС����?y��n)����܇�^ˮƽ���ѽ�(j��ng)�l(f��)����׃���� оƬ��(sh��)�H�z�y(c��)�������S�������(y��ng)ԓ��G1���@�r(sh��)�Ϳ����Д������µ����ˣ�����������߀�����£��͵�ͨ�^ ƽ�ص��µص�����ͻ׃���Д��ˣ� �@߀�Ì�һ��(g��)����ͻ׃�Дຯ��(sh��)���Д�����(j��)���������S����ϵ���̖(h��o)׃С�˶��١�����dz��m(x��)׃С�������µĕr(sh��)���(hu��)��һ��(g��)С��ʧ���^�̣������Д������£� �����׃С�����S�ֲ�׃���Ǿ������¡� �@��(g��)Ҳ�Ì�(sh��)�y(c��)�����������(j��)�������^���У�G2���������\(y��n)��(d��ng)�S���ϵ���ͻȻ����F1+G2�������Д���x܇�ˡ������^���У�G2׃���˄�(d��ng)���������@��(g��)�r(sh��)��F(xi��n)1-G2�@��(g��)��(y��ng)ԓ��ؓ(f��)��(sh��)���@��(g��)ؓ(f��)��(sh��)�Ľ^��(du��)ֵͻȻ׃С�����Д���x܇�ˡ� �P(gu��n)���oֹ�r(sh��)���Ƿ�x܇���Д࣬ ��(y��ng)ԓ����ͨ�^�\(y��n)��(d��ng)�S�����Ƿ����p����̖(h��o)׃�����Дࡣ��?y��n)飬�����DŽ��٣�Ҳ�������ǽ^��(du��)�Ą��٣��\(y��n)��(d��ng)�^���У��S���Ͽ϶���(hu��)����̖(h��o)����(d��ng)�� ֻ���oֹ�ĕr(sh��)����(g��)�S��Ų���(hu��)����̖(h��o)׃���� ��(d��ng)G1<G �������\(y��n)��(d��ng)�S����̖(h��o)��0���t�J(r��n)�����µ��x܇������һֱ�|�l(f��)�x܇�� ��(d��ng)G�㶨��һ��(g��)��������G1=G���S������̖(h��o)��0�r(sh��)�������Д���ƽ�x܇������(g��)���t�P(gu��n)�]�ɣ��@�N��rҲ���ٳ��F(xi��n)������Ҳ����(sh��)�á� ����˼·���@�ӣ���(x��)��(ji��)����߀��Ҫ�Ќ�(sh��)�H��(sh��)��(j��)�����á� |
30.jpg (47.12 KB, ���d��(sh��): 66)

С����|51�����Փ��
|
 ����TQQ:125739409;���g(sh��)����QQȺ281945664
����TQQ:125739409;���g(sh��)����QQȺ281945664
Powered by ��Ƭ�C(j��)�̳̾W(w��ng)

 �ղ�
�ղ� �
� ��
��
