|
發布時間: 2023-1-17 13:34
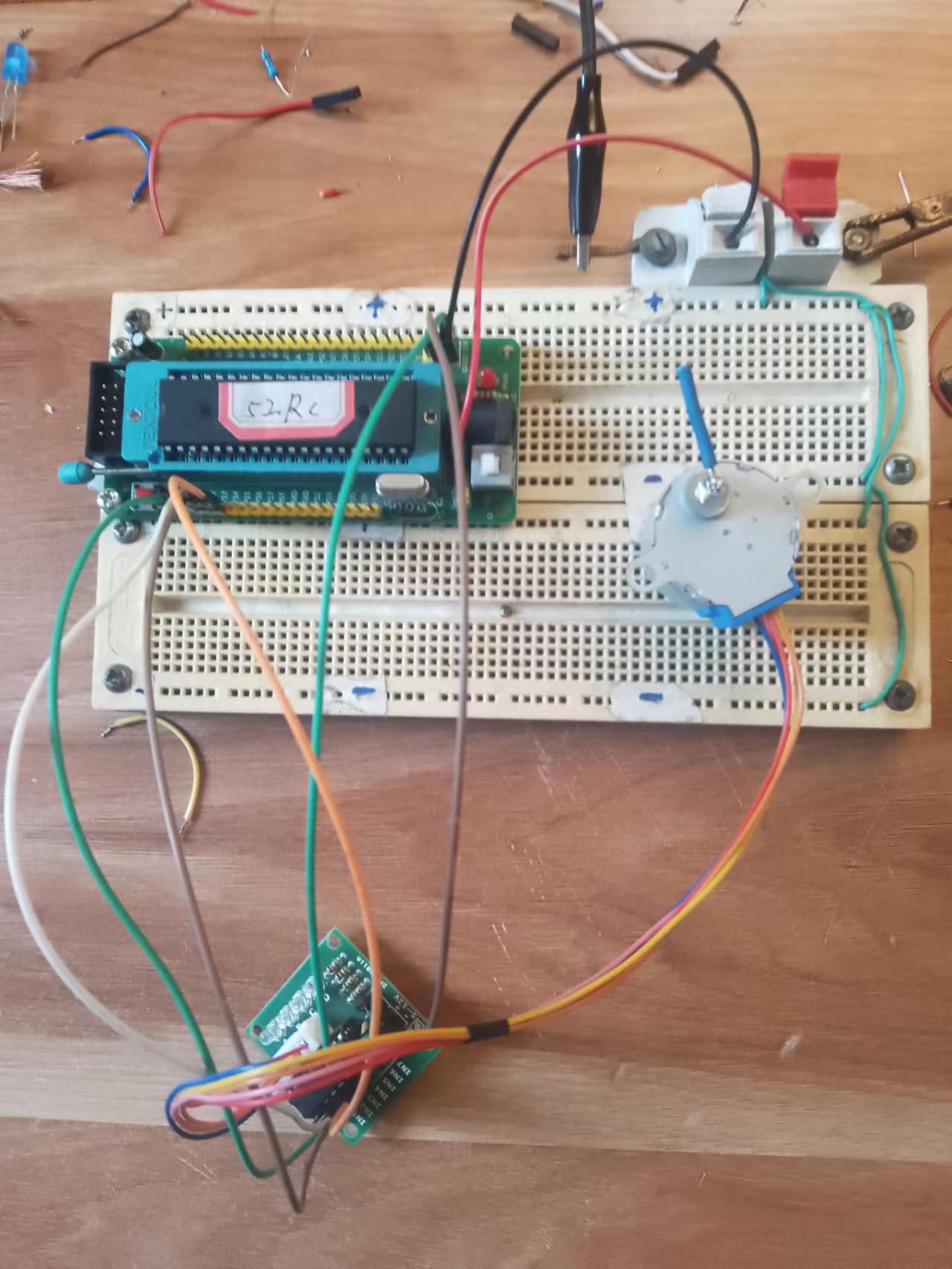
正文摘要:實驗用的是28BYJ48型步進電機+ULN2003驅動,程序是正轉一圈、停、又反轉一圈。。。如此反復轉動,但發現步進電機丟步嚴重,比如12點方向開始轉動,一兩小時下來位置就變了,有30度左右位移,請問是怎樣造成的,謝謝 ... |
|
新人請教uchar phasecw[8] ={0x08,0x04,0x02,0x01};//正轉,4拍 A-B-C-D 怎么知道代表哪幾個接口 p1 p..... // 四相的引腳定義 sbit A1 = P1^4; 我只知道這樣的 |
|
步進電機丟步很正常,何況還是你這種經過減速的電機! 要想不丟步,就要上閉環控制,加入轉軸定位裝置。不然軟件再如何改,你這種無限正反轉的,都是會丟步的。 |
|
程序里有的,沒粘貼上來 |
| 謝謝各位老師指導,改為八拍驅動方式就好多了 |
| 加位置傳感器,定時或每轉一圈校準。 |

|
|
本帖最后由 glinfei 于 2023-1-19 09:12 編輯 沙發說的對,但你的原因是這個電機帶減速齒輪,你按64寫的,實際比64要少一點,我算了一下,一天會差在15度左右。 |
| 丟步就是驅動頻率太高了。 |
| 步進電機有失步問題,脈沖與步進不一定一一對應,要位置準確,要有位置傳感器。 |
 收藏
收藏 頂
頂 踩
踩

