熱門: 51單片機(jī) | 24小時必答區(qū) | 單片機(jī)教程 | 單片機(jī)DIY制作 | STM32 | Cortex M3 | 模數(shù)電子 | 電子DIY制作 | 音響/功放 | 拆機(jī)樂園 | Arduino | 嵌入式OS | 程序設(shè)計(jì)
熱門: 51單片機(jī) | 24小時必答區(qū) | 單片機(jī)教程 | 單片機(jī)DIY制作 | STM32 | Cortex M3 | 模數(shù)電子 | 電子DIY制作 | 音響/功放 | 拆機(jī)樂園 | Arduino | 嵌入式OS | 程序設(shè)計(jì)
|
發(fā)布時間: 2024-10-10 10:34
正文摘要:由于本論壇禁止直接求程序,禁止伸手黨,所以向大家請教一下大致的實(shí)現(xiàn)方法與思路,理清頭緒后我自己來寫程序去實(shí)現(xiàn),謝謝大家 求指導(dǎo)一下這個設(shè)計(jì) |
|
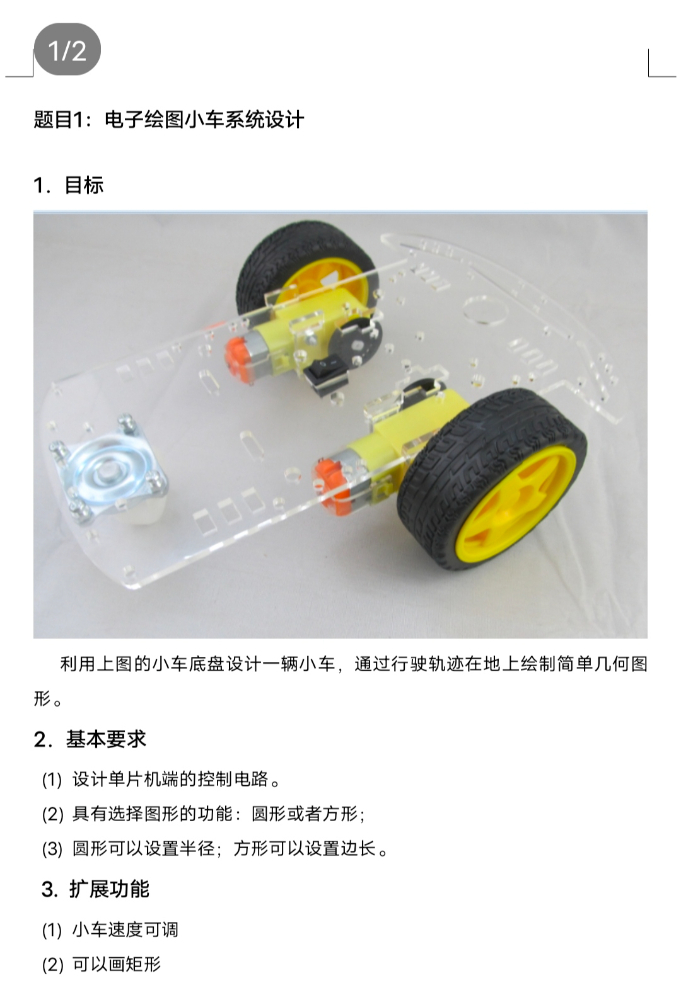
電子繪圖小車系統(tǒng)設(shè)計(jì)思路 1. 系統(tǒng)概述 該系統(tǒng)主要由以下部分組成: 小車平臺: 包含電機(jī)、車輪、滑軌、筆架等,負(fù)責(zé)移動和繪畫。 控制系統(tǒng): 采用單片機(jī)控制,負(fù)責(zé)接收用戶指令,控制電機(jī)運(yùn)動,調(diào)節(jié)筆架高度,實(shí)現(xiàn)繪圖功能。 用戶接口: 通過按鍵、顯示屏或其他方式與用戶交互,選擇圖形、設(shè)置參數(shù)和控制小車。 2. 控制電路設(shè)計(jì) 2.1 單片機(jī)選擇 選擇一款合適的單片機(jī),例如Arduino Uno,具備足夠的I/O口和處理能力。 2.2 電機(jī)驅(qū)動電路 選擇合適的電機(jī)驅(qū)動模塊,例如L298N電機(jī)驅(qū)動模塊,驅(qū)動小車電機(jī),實(shí)現(xiàn)正反轉(zhuǎn)控制和速度調(diào)節(jié)。 將電機(jī)驅(qū)動模塊與單片機(jī)連接,通過單片機(jī)控制電機(jī)驅(qū)動模塊的信號,實(shí)現(xiàn)對電機(jī)的控制。 2.3 光電傳感器 使用光電傳感器監(jiān)測小車行駛距離,通過單片機(jī)讀取光電傳感器的數(shù)據(jù),計(jì)算小車移動距離。 將光電傳感器與單片機(jī)連接,使用中斷方式讀取傳感器信號,以提高響應(yīng)速度和效率。 2.4 筆架設(shè)計(jì) 設(shè)計(jì)一個簡單的筆架,通過舵機(jī)控制筆架的升降,實(shí)現(xiàn)畫筆的抬起和放下。 將舵機(jī)與單片機(jī)連接,通過單片機(jī)控制舵機(jī)的轉(zhuǎn)動角度,實(shí)現(xiàn)對筆架的控制。 2.5 用戶接口 使用按鍵來選擇圖形類型,例如圓形、方形、矩形等。 使用數(shù)字按鍵或旋鈕來設(shè)置圖形參數(shù),例如圓的半徑、方形的邊長、矩形的長寬等。 使用顯示屏來顯示用戶選擇和設(shè)置的參數(shù)信息,方便用戶進(jìn)行操作。 3. 軟件設(shè)計(jì) 3.1 程序流程 初始化: 初始化單片機(jī)、電機(jī)驅(qū)動模塊、光電傳感器、舵機(jī)、按鍵、顯示屏等硬件設(shè)備。 用戶輸入: 通過按鍵選擇圖形類型和設(shè)置參數(shù),并顯示在顯示屏上。 繪制圖形: 根據(jù)選擇的圖形類型和設(shè)置的參數(shù),計(jì)算小車行駛路徑,并通過電機(jī)驅(qū)動模塊控制電機(jī)運(yùn)動,通過舵機(jī)控制筆架升降,實(shí)現(xiàn)繪圖功能。 循環(huán)控制: 不斷循環(huán)執(zhí)行步驟2和3,直到用戶停止繪圖。 3.2 代碼框架 // 定義引腳 const int motorA_pin1 = 12; const int motorA_pin2 = 13; const int motorB_pin1 = 11; const int motorB_pin2 = 10; const int sensorPin = 2; const int servoPin = 9; const int buttonPin = 7; // 定義變量 int shape = 0; // 圖形類型 0: 圓形,1: 方形,2: 矩形 int radius = 5; int sideLength = 5; int length = 10; int width = 5; unsigned long distance = 0; int direction = 1; // 運(yùn)動方向,1: 正向, -1: 反向 // 初始化函數(shù) void setup() { // 初始化串口 Serial.begin(9600); // 初始化電機(jī)驅(qū)動模塊 pinMode(motorA_pin1, OUTPUT); pinMode(motorA_pin2, OUTPUT); pinMode(motorB_pin1, OUTPUT); pinMode(motorB_pin2, OUTPUT); // 初始化光電傳感器 pinMode(sensorPin, INPUT); attachInterrupt(digitalPinToInterrupt(sensorPin), sensorInterrupt, RISING); // 初始化舵機(jī) pinMode(servoPin, OUTPUT); // 初始化按鍵 pinMode(buttonPin, INPUT); } // 主循環(huán)函數(shù) void loop() { // 讀取按鍵輸入 if (digitalRead(buttonPin) == LOW) { // 處理按鍵事件,選擇圖形類型和設(shè)置參數(shù) } // 根據(jù)圖形類型和參數(shù),控制小車運(yùn)動和筆架升降,實(shí)現(xiàn)繪圖功能 switch (shape) { case 0: // 繪制圓形 drawCircle(radius); break; case 1: // 繪制方形 drawSquare(sideLength); break; case 2: // 繪制矩形 drawRectangle(length, width); break; } } // 光電傳感器中斷函數(shù) void sensorInterrupt() { distance += direction * 1; // 每次觸發(fā)中斷,計(jì)數(shù)值加或減1 } // 繪制圓形 void drawCircle(int radius) { // 控制電機(jī)運(yùn)動,并根據(jù)距離和半徑計(jì)算運(yùn)動時間 // 控制舵機(jī)升降,放下筆畫圓,再抬起筆 } // 繪制方形 void drawSquare(int sideLength) { // 控制電機(jī)運(yùn)動,并根據(jù)距離和邊長計(jì)算運(yùn)動時間 // 控制舵機(jī)升降,放下筆畫邊,再抬起筆 } // 繪制矩形 void drawRectangle(int length, int width) { // 控制電機(jī)運(yùn)動,并根據(jù)距離、長和寬計(jì)算運(yùn)動時間 // 控制舵機(jī)升降,放下筆畫邊,再抬起筆 } // 控制電機(jī)正轉(zhuǎn) void motorForward() { // 設(shè)置電機(jī)驅(qū)動模塊的信號,實(shí)現(xiàn)電機(jī)正轉(zhuǎn) } // 控制電機(jī)反轉(zhuǎn) void motorBackward() { // 設(shè)置電機(jī)驅(qū)動模塊的信號,實(shí)現(xiàn)電機(jī)反轉(zhuǎn) } // 設(shè)置電機(jī)速度 void setMotorSpeed(int speed) { // 設(shè)置電機(jī)驅(qū)動模塊的信號,實(shí)現(xiàn)電機(jī)速度調(diào)節(jié) } // 控制舵機(jī)轉(zhuǎn)動 void setServoAngle(int angle) { // 設(shè)置舵機(jī)驅(qū)動信號,實(shí)現(xiàn)舵機(jī)角度控制 } 4. 注意事項(xiàng) 電機(jī)驅(qū)動模塊: 選擇合適的電機(jī)驅(qū)動模塊,確保其能驅(qū)動小車電機(jī),并具有足夠的電流輸出能力。 傳感器精度: 光電傳感器精度會影響繪圖精度,選擇合適的傳感器,并進(jìn)行校準(zhǔn)。 筆架設(shè)計(jì): 筆架設(shè)計(jì)應(yīng)確保畫筆能穩(wěn)定地接觸紙面,并能輕松升降。 代碼調(diào)試: 編寫程序時,需要仔細(xì)調(diào)試代碼,確保程序能正確執(zhí)行,并根據(jù)實(shí)際情況進(jìn)行調(diào)整。 5. 拓展 可以增加更多圖形類型,例如三角形、五角星等。 可以添加更高級的控制功能,例如軌跡規(guī)劃、自動避障等。 可以使用藍(lán)牙、WIFI等無線通信模塊,實(shí)現(xiàn)手機(jī)或電腦遠(yuǎn)程控制繪圖小車。 6. 總結(jié) 以上是一個電子繪圖小車系統(tǒng)設(shè)計(jì)的思路和代碼框架,具體的實(shí)現(xiàn)細(xì)節(jié)需要根據(jù)實(shí)際情況進(jìn)行調(diào)整。該系統(tǒng)可以幫助用戶學(xué)習(xí)單片機(jī)控制技術(shù)、電機(jī)驅(qū)動技術(shù)、傳感器應(yīng)用等,并可以激發(fā)學(xué)生的創(chuàng)造力和動手能力。 |
| 這是帶碼盤的直流電機(jī),不要想著復(fù)雜的pwm控制,就是用中斷數(shù)兩個輪子走的碼盤個數(shù),計(jì)算各輪子走的距離,題的要求也是一筆畫,不用抬筆,把筆固定在電機(jī)附近的孔就好。另外建議電機(jī)驅(qū)動輪放前邊相對好走直線。 |
| 可以用51單片機(jī)設(shè)計(jì),用L298驅(qū)動電機(jī) |
| 簡單的話:兩個獨(dú)立的電機(jī)驅(qū)動加一個mcu控制定時器發(fā)送pwm波就行 |
Powered by 單片機(jī)教程網(wǎng)

 收藏
收藏 頂
頂 踩
踩
