
 1 引言
1 引言
輪式移動機器人是機器人研究領域的一項重要內容.它集機械、電子、檢測技術與智能控制于一體。在各種移動機構中,輪式移動機構最為常見。輪式移動機構之所以得到廣泛的應用。主要是因為容易控制其移動速度和移動方向。因此.有必要研制一套完整的輪式機器人系統。并進行相應的運動規劃和控制算法研究。筆者設計和開發了基于5l型單片機的自動巡線輪式機器人控制系統。
摘 要:設計了一種自動巡線輪式行走機器人控制系統,采用AT89S52型單片機作為主控CPU,外加一個復雜可鳊程邏輯器件(CPID)協助CPU處理數據,擴展了程序參數存儲器,能夠進行檢測引導線和直流電機、舵機的PWM控制。
關鍵詞:控制系統;復雜可編程邏輯器件;存儲器;光電檢測;脈沖寬度調制
2 控制系統總體設計
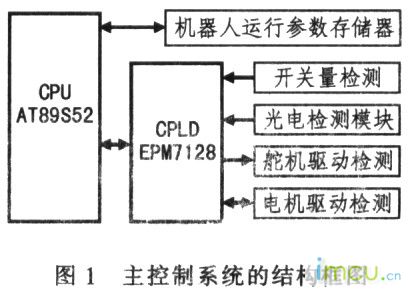
機器人控制系統由主控制電路模塊、存儲器模塊、光電檢測模塊、電機及舵機驅動模塊等部分組成,控制系統的框圖如圖1所示。
3 主控制模塊設計
3.1 CPLD設計
在機器人控制系統中.需要控制多個電動機和行程開關.還要進行光電檢測.如果所有的任務都由AT89S52型單片機來完成.CPU的負擔就會過重。影響系統的處理速度。因此擴展1個CPLD.型號為EPM7128。它屬于.MAX7000系列器件。包括2個通用1/0口.2個專用I/O口,專用I/O口可作為每個宏單元和輸入輸出引腳的高速控制信號(時鐘、清除和輸出使能等),電動機的。PWM信號也由其產生。
EPM7128的引腳排列如圖2所示。MlP—M4P引腳的輸出為PWM脈寬調制信號,M1FB—M4FB引腳為電機的方向控制信號,P00一P07接單片機的PO口,100一1015為擴展的2個通用I/O口,SIl—S17引腳為行程開關輸入信號,LI11一LI17引腳為光電探頭輸入信號。CPLD的編程用VHDL語言,產生1路PWM信號的部分程序源代碼如下:
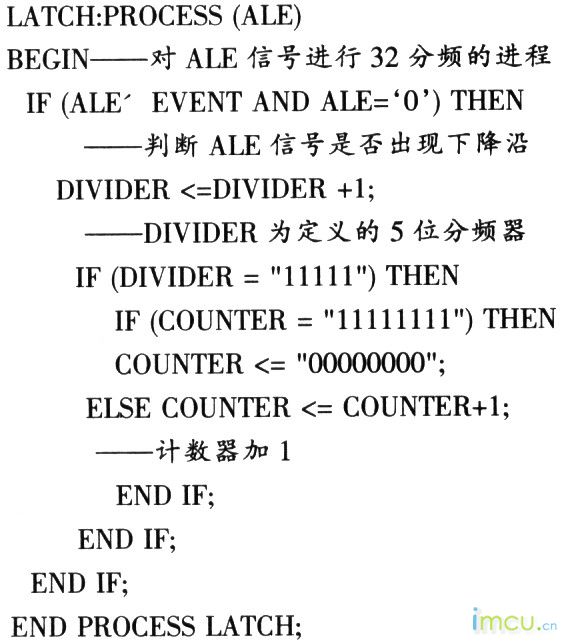
單片機采用24MHz的晶體振蕩器,ALE信號的頻率fALE=f16=6MHz,最終輸出PWM信號的引腳MlP的頻率為:
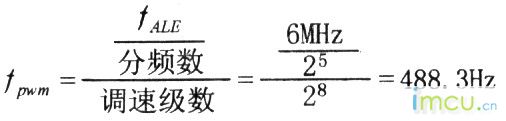
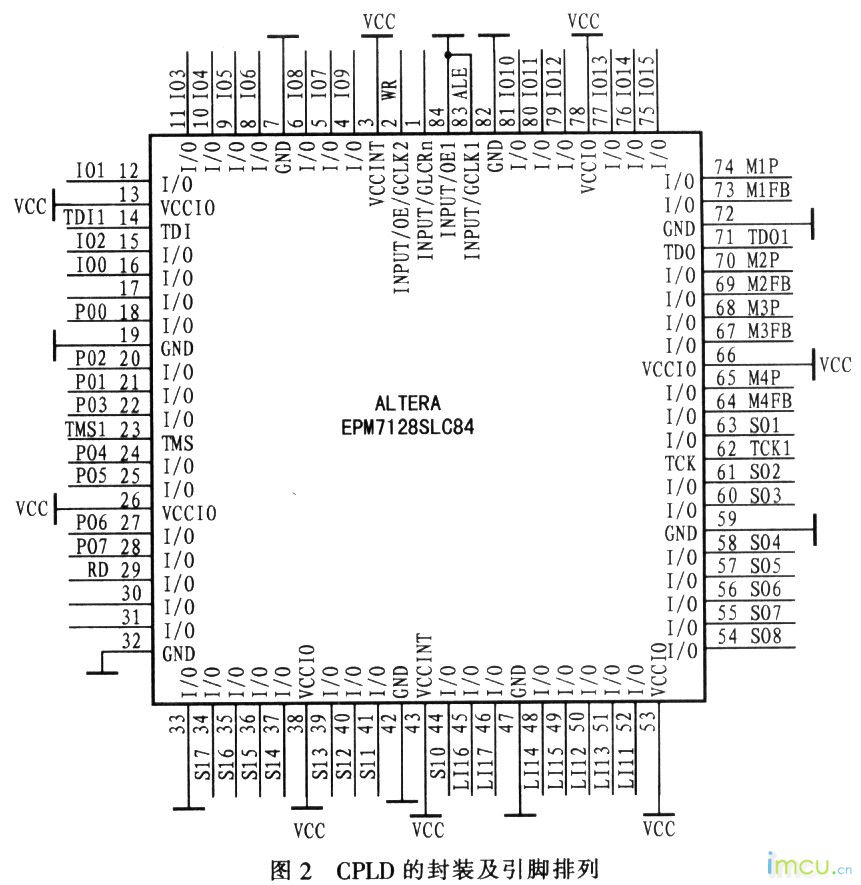
調節這個信號的占空比可以使直流電動機獲得O-255級的轉速。
3.2 機器人運行參數存儲器的擴展
機器人運行路徑和動作可以根據比賽情況的不同而發生變化,這樣,每改變1次運行參數就必須對單片機的Flash進行1次擦寫。為了解決這一問題.擴展了程序參數存儲器,用來存放機器人的運行路徑和動作參數.擴展電路如圖3所示。
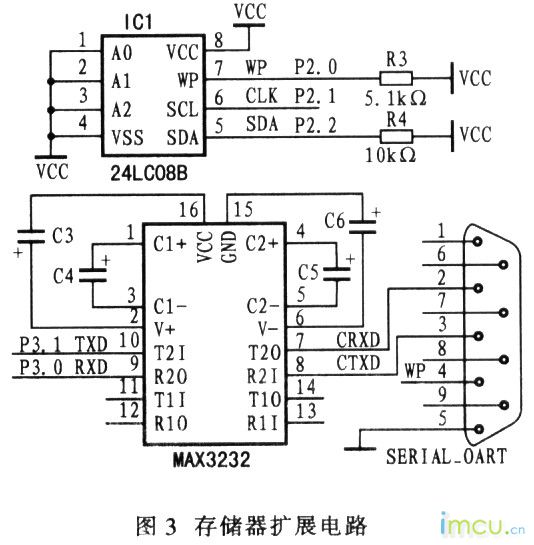
其中IC1為24LC08B,是I2E總線的串行E2PROM存儲器,最多能夠存儲lK字節的數據。IC2為MAX3232型電平轉換器,其內部有1個電源電壓變換器,可以將計算機的電平轉換為標準TTL電平,實現計算機與單片機之間通過串行口傳輸數據,使單片機完成對24/LC08B的數據存儲操作。單片機運行時,直接從24LC08中讀取機器人的運行參數,控制機器人運行。
4 光電檢測模塊設計
4.1 光電檢測過程
設計光電檢測模塊是為了讓機器人能夠檢測地面上的白色引導線。光電檢測電路主要包括發射部分和接收部分,其原理如圖4所示。
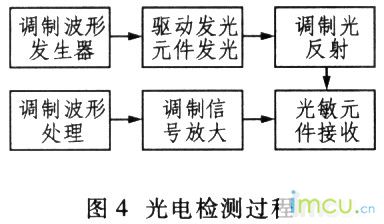
發射部分的波形調制采用了頻率調制方法。由于發光二極管的響應速度快,其工作頻率可達幾MHz或十幾MHz,而檢測系統的調制頻率在幾十至幾百kHz的范圍內,能夠滿足要求。光源驅動主要負責把調制波形放大到足夠的功率去驅動光源發光。光源采用紅外發光二極管,工作頻率較高,適合波形為方波的調制光的發射。
接收部分采用光敏二極管接收調制光線,將光信號轉變為電信號。這種電信號通常較微弱,需進行濾波和放大后才能進行處理。調制信號的放大采用交流放大的形式,可使調制光信號與背景光信號分離,為信號處理提供方便。調制信號處理部分對放大后的信號進行識別,判斷被檢測對象的特性。因此,此模塊的本質是將“交流”的、有用的調制光信號從“直流”的、無用的背景光信號中分離出來,從而達到抗干擾的目的。
4.2 光電探頭
光電探頭安裝在機器人底盤前部,共設置了5個檢測點。從理論上講,檢測點越多、越密,識別的準確性與可靠性就越高,但是硬件的開銷與軟件的復雜程度也相應的增加。采用該巡線系統保證了檢測的精確度,節約了硬件的開銷。發光二極管發出的調制光經地面反射到光敏二極管。光敏二極管產生的光電流隨反射光的強弱而線性變化。把這種變化檢測出來,就可以判斷某一個檢測點是否在白色引導線的上方,從而判斷機器人和白色引導線的相對位置。
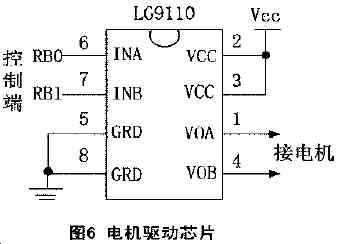
5 電機驅動模塊
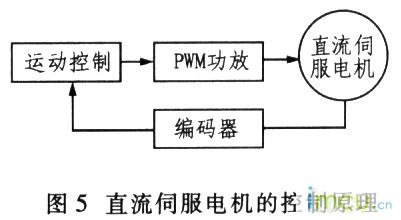
機器人的驅動件主要是電機和舵機,都可以采用PWM進行調速與控制。根據脈沖編碼器的反饋信號,對機器人的運動狀態進行實時控制。直流伺服電機的控制原理如圖5所示。調節:PWM的信號就能夠快速調節舵機的轉角,從而實現機器人的方向控制。
6 結束語
基于5l型單片機的自動巡線輪式機器人控制系統運行平穩可靠,抗干擾能力強,不僅滿足了機器人大賽的設計要求,同時也為智能機器人搭建了良好的控制平臺。
-------------------------------------2---------------------------
中文摘要:
基于仿生原理,以PIC單片機為控制器的核心,制作出了動作靈活、價格低廉以及模塊化結構的六足機器人。該機器人能夠嚴格按三角步態進行行走,實現諸如直線、轉彎、躲避障礙物和追蹤物體等行走功 能。文中介紹了該機器人三角步態的行走原理、結構組成、控制系統和控制算法。
英文摘要:
This research describes the fabrication of a hexapod bionic robot, controlled by PIC microprocessor, walking based on bionic principle, which has some advantages such as simple, active movements, harmony in walking and etc. This robot has some abilities such as linear walking, turning, avoiding barriers, and tracking object walking etc. The structure, control system and control algorithm of this robot are explained in the paper.
前 言
機器人技術是融合了機械、電子、傳感器、 計算機、人工智能等許多學科的知識,涉及到當今 許多前沿領域的技術。一些發達國家已把機器人制 作比賽作為創新教育的戰略性手段。如日本每年都 要舉行諸如“NHK杯大學生機器人大賽”、“全日本機 器人相撲大會”、“機器人足球賽”、“全日本電子鼠 走迷宮大賽”等各種類型的機器人制作比賽,參加 者多為學生,旨在通過大賽全面培養學生的動手能 力、創造能力、合作能力和進取精神,同時也普及智 能機器人的知識。 開展機器人的制作活動,是培養大學生的創 新精神和實踐能力的最佳實踐活動之一,特別是機 電專業學生開展綜合知識訓練的最佳平臺。目前國 內在機器人的制作中,較多地選用機器人公司出售 的產品,通過積木式的搭配或組裝來進行創意組合 設計。這樣方式的特點是設計制作方便、快捷, 更適合于創意組合設計。但存在著成本較高,且 設計的機器人功能要受到產品本身性能的制約,并 不能充分實現設計者的創意和設想等缺點。 這里強調大學生自行動手進行機構設計、軟 件編程和硬件電路制作,旨在充分發揮學生潛在的 創造制作能力。本文基于仿生原理,設計制作了兩 套連桿機構作為機器人的六足,以PIC單片機為控制 器的核心,小型帶減速器直流電機作為驅動元件,配 置不同類型的傳感器,再加上智能軟件的控制,制 作出了動作靈活、價格低廉、以及模塊化結構的六 足機器人。文中介紹了該機器人三角步態的行走原 理、結構組成、控制系統和控制算法。
2.1 PIC單片機
美國Microchip 公司的PIC16 系列單片機是一 種新型的CMOS 工藝的8 位單片機。因其功耗低,超 小型,低成本,功能完整和簡單易學等特點已經 得到了越來越廣泛的應用。PIC16F84 微控制器屬 于PIC 系列單片機的中級產品,18 引腳。內置4k × 14 閃速程序存儲器,可多次修改程序,使用起 來特別方便。具有兩個I/O 端口(RA 和RB),片 內上電復位、延時電路、看門狗電路等。基于 PIC16F84 控制器的I/O 口資源的分配如圖5 所 示。
2.3 傳感器模塊
障礙物檢測傳感器要求檢測的距離遠,選用 市場上常見的反射式紅外線傳感器,型號為 TX05D。該傳感器是一體化的紅外線發射,接受器 件,它內部包含紅外線發射,接受及信號放大與 處理電路。信號輸出端可直接與CPU 端口相連,探 測距離為2 ~120cm,滿足了機器人的硬件要求。 PIC16F84單片機的RB4、RB5 管腳分別與兩只TX05D 傳感器的信號輸出端相連。 觸角傳感器使用的是普通的微動機械開關, 用于檢測紅外傳感器探測不到的,處于較高位置的 障礙物。當機器人的觸角接觸到障礙物后,觸動 機械開關,發出控制信號,控制機器人轉彎或后 退,躲開處于前方的障礙物。兩只機械開關經防 抖動電路處理后,分別與PIC16F84 單片機的RB6、 RB7 管腳相連。
4. 結論
本文基于仿生原理,使用連桿機構作為機器 人的六足,以PIC單片機為控制器的核心,小型帶減 速器直流電機作為驅動元件,配置不同類型的傳感 器,再加上智能軟件的控制,制作出了動作靈活、價 格低廉、功能強大以及模塊化結構的六足機器人。大 量的行走實驗證明,該機器人能夠嚴格按三角步態 的進行行走,完成諸如直線、轉彎、躲避障礙物和追 蹤物體等行走功能,具有一定的娛樂性和實際應用 價值。