|
���چ�Ƭ�C(j��)�ĵ���������ϵ�y(t��ng)�O(sh��)Ӌ(j��)
ժҪ �S�����(hu��)��(j��ng)��(j��)ˮƽ�İl(f��)չ���F(xi��n)���˂���������(g��)�Ի����Ԅ�(d��ng)������칝(ji��)�࣬���M��Ȥ�����ʽ�����bҪ��ęn��Խ��Խ�ߣ�����Ҿ����Ի������ܻ���Ҫ��ʹ���ܿ��Ƽ��g(sh��)�����ܼҾ���Ӯa(ch��n)Ʒ�еõ��ˏV����(y��ng)�ã����S�����ܼҾӵĿ��ٰl(f��)չ�����¹��ߵ����ܻ��l(f��)չ���@����c���������������ܻ��l(f��)չ֮�F(xi��n)�ڼ���(j��ng)�������(hu��)�ĺܴ��P(gu��n)ע�����ęn���˰����Ј�(ch��ng)��(d��ng)�B(t��i)��협�(y��ng)�r(sh��)�����}���O(sh��)Ӌ(j��)����(sh��)�F(xi��n)���������¼�ϵ�y(t��ng)�� ���Æ�Ƭ�C(j��)�M(j��n)�вɼ����ա���ɂ�(g��)�ⲿ�����̖(h��o)����ͨ�^��Ƭ�C(j��)�������D(zhu��n)�¼ܣ����D(zhu��n)�¼�ͨ�^���M(j��n)늙C(j��)�M(j��n)���{(di��o)��(ji��)����(d��ng)�ⲿ���磬�ҟo��r(sh��)�����¼��D(zhu��n)�������������(d��ng)������ߛ]��ꖹ�r(sh��)���D(zhu��n)���҃�(n��i)����ֹ�����������Ѻڡ����й��Ղ��������ù�����裬�����������LY-69��Ιz�y(c��)������������Ӳ�����ò��M(j��n)늙C(j��)�����I�·�O(sh��)�����պ���ε��ֵ��5110Һ���@ʾ�Мy(c��)�����O(sh��)��ֵ����������B(t��i)�� ͨ�^�O(sh��)Ӌ(j��)�͌�(sh��)�(y��n)�{(di��o)ԇ����˻��چ�Ƭ�C(j��)����������ϵ�y(t��ng)��
Ŀ� 1 ���� 1.1 �n�}�о������c���x 1,2 ����(n��i)���о��F(xi��n)�� 1.3 �n�}�о���(n��i)�� 2 ���چ�Ƭ�C(j��)�ĵ���������ϵ�y(t��ng)��Ӳ���O(sh��)Ӌ(j��) 2.1 ���w�O(sh��)Ӌ(j��)��D 2.2 ���Ղ����� 2.3 ������� 2.4 �¼�λ�Â����� 2.5 STM32������ 2.6 ���M(j��n)늙C(j��)�(q��)��(d��ng)�· 2.7 Һ���@ʾ�� 2.8 ���I�· 3 ���چ�Ƭ�C(j��)�ĵ���������ϵ�y(t��ng)��ܛ���O(sh��)Ӌ(j��) 3.1 ϵ�y(t��ng)���� 3.2 ܛ���㷨 3.3 ܛ�����e(cu��)̎�� 4 ��(sh��)�(y��n)�{(di��o)ԇ 5 �Y(ji��)Փ�cչ�� �����īI(xi��n) ���x ���1
1 �����S�����(hu��)��(j��ng)��(j��)ˮƽ�İl(f��)չ���F(xi��n)���˂���������(g��)�Ի����Ԅ�(d��ng)������칝(ji��)�࣬���M��Ȥ�����ʽ�����bҪ��ęn��Խ��Խ�ߣ�����Ҿ����Ի������ܻ���Ҫ��ʹ���ܿ��Ƽ��g(sh��)�����ܼҾ���Ӯa(ch��n)Ʒ�еõ��ˏV����(y��ng)�ã������H��(y��u)���˂������ʽ�;�ס�h(hu��n)�������ҷ����˂���Ч�ذ��ŕr(sh��)�g��(ji��)�s���N��Դ����(sh��)�F(xi��n)�˼�늡��������������ƺͷ��I��(b��o)�������r(sh��)���Ƽ��Ԓ�h(yu��n)�̿��Ƶȡ����S�����ܼҾӵĿ��ٰl(f��)չ�����¹��ߵ����ܻ��l(f��)չ���@����c���������������ܻ��l(f��)չ֮�F(xi��n)�ڼ���(j��ng)�������(hu��)�ĺܴ��P(gu��n)ע�����ęn���˰����Ј�(ch��ng)��(d��ng)�B(t��i)��협�(y��ng)�r(sh��)�����}���O(sh��)Ӌ(j��)����(sh��)�F(xi��n)���������¼�ϵ�y(t��ng)�� 1.1 �n�}�о������c���x���ڬF(xi��n)�����¼ܰl(f��)չ�F(xi��n)����O(sh��)Ӌ(j��)�_�l(f��)��һ�N�����˂��[Óԭʼ�������������¼ܡ����������¼���Ҫ���c(di��n)���ڣ�������s��������(ji��n)�Σ�ռ����eС�����^��(sh��)ʬ��(g��u)��(y��u)�c(di��n)��ͬa(ch��n)Ʒ�m�п��տsʽ�ģ����ٽM�b���ɣ��������^�韩���������ż�ֻ�谴�´��_���I���¼ܗU�����Ԅ�(d��ng)��չ�_����ͬ�r(sh��)���¼����R(sh��)�e�������һ�Ԅ�(d��ng)������·����ܵ�Ŀ�ġ������������¼�����Ч�ر���������r(sh��)���·��o������������ܝ�;������ɫ׃��r(sh��)���¼����Ԅ�(d��ng)�ջأ������·��������^ҹ�� 1,2 ����(n��i)���о��F(xi��n)�����Ї������г����Լ��r(n��ng)���ձ��nj�������������_(t��i)��(n��i)�����ⲿ�������y(t��ng)���������﷽ʽ����_(t��i)��(n��i)�컨�����O(sh��)����䓽���^���^��ͨ���ǒ�����U�������U�w���˂�ͨ����(x��)�T����һ֧�ΗU������֧�ε����U�����@�����������M(f��i)�r(sh��)�M(f��i)�������Ҳ���䓽��U�c��(d��ng)��F(xi��n)���������Y(ji��)��(g��u)����_(t��i)Ҳ�����䡢��ʧ���^�����⣬��ͥͨ�����������������ˣ����y(t��ng)��֧�Ε��¡����²��H���M(f��i)���M(f��i)������Ŀ.����Ť����θ����֧�β���������w��������y(t��ng)�����·�ʽ�б���IJ��㣬����F(xi��n)�֓u���¼ܣ��֓u���¼ܸ�׃��֧�����¼ܵĂ��y(t��ng)��(x��)�T��ͬ�r(sh��)Ҳ�o�����ͥ�����˸���ķ��㡣���֓u���¼����O(sh��)�ö���(g��)�C(j��)е�b�ú�֧���c(di��n)��ͬ�r(sh��)�����W(w��ng)�����Á펧��(d��ng)�����U�����������Ɏ�֧���c(di��n)������W(w��ng)���IJ��ã��֓uʽ���¼ܽoԭ��Ư������_(t��i)�����˲��������ء���Σ��֓u���¼ܵ�����ÿ�ζ�Ҫ�˹��D(zhu��n)�Q���^��Ŀ.��Ҫ�����u��(d��ng)�������U�����������U���d�����������^�u��ȥ���M(f��i)�������ׂ��֡���ˣ��֓u���¼��mȻ��׃���y(t��ng)֧�����µIJ��㣬���]�Џص�׃�M(f��i)���M(f��i)���ĸ�����B(t��i)���˂�������һ�N����������^���������¼ܵij��F(xi��n)�� 1.3 �n�}�о���(n��i)�����چ�Ƭ�C(j��)�ĵ���������ϵ�y(t��ng)�O(sh��)Ӌ(j��)����Ҫ���Æ�Ƭ�C(j��)����������ģ���(sh��)�F(xi��n)�Ԅ�(d��ng)���µĹ��ܣ�������(j��)���w��r�M(j��n)������(y��ng)���{(di��o)�������w���ܺ�ָ��(bi��o)���£� - �������Uȫ�Ԅ�(d��ng)�������Ɍ�(sh��)�F(xi��n)�o�˲ٿ�
��2�����Uֻ�Ѓɂ�(g��)λ�ã����ȥ���s��
��3��λ�Ùz�y(c��)�����U���ȥ�r(sh��)�����_(d��)ָ��λ���܉�ͣ��
��4��ܛ�����e(cu��)̎�������U��s�^�����������N�ϵK���܉�ͨ�^ܛ�����e(cu��)̎���ֹͣ
��5���������������ڕr(sh��)��?q��)��·��ջ��������(x��)r�����ꖹ����ҵĕr(sh��)�����ȥ����
- .�������������ĕr(sh��)��?q��)��·��ջ?/font>
��7������(sh��)�`�����{(di��o)��(ji��)����(d��ng)�B(t��i)�O(sh��)�ã������I+Һ���@ʾ
��8����늣�5V�Դ���o��Ƭ�C(j��)��늙C(j��)
2 ���چ�Ƭ�C(j��)�ĵ���������ϵ�y(t��ng)��Ӳ���O(sh��)Ӌ(j��)���Æ�Ƭ�C(j��)�M(j��n)�вɼ����ա���ɂ�(g��)�ⲿ�����̖(h��o)����ͨ�^��Ƭ�C(j��)�������D(zhu��n)�¼ܣ����D(zhu��n)�¼�ͨ�^���M(j��n)늙C(j��)�M(j��n)���{(di��o)��(ji��)����(d��ng)�ⲿ���磬�ҟo��r(sh��)�����¼��D(zhu��n)�������������(d��ng)������ߛ]��ꖹ�r(sh��)���D(zhu��n)���҃�(n��i)����ֹ�����������Ѻڡ� 2.1 ���w�O(sh��)Ӌ(j��)��D ���ƿ��w��D���D2.1��ʾ��ͨ�^���Ղ����������������֪�ⲿ���Ĺ��պ������r�����I�O(sh��)�����պ���ε��ֵ���¼�λ�Â������ɼ��¼�����λ�ã�����Ƭ�C(j��)�(q��)��(d��ng)���M(j��n)늙C(j��)�����¼܁������҃�(n��i)���⡣ 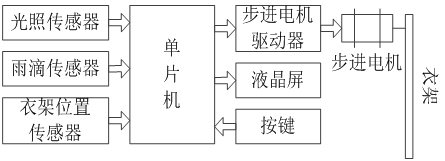
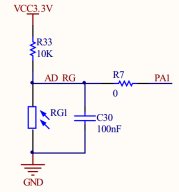
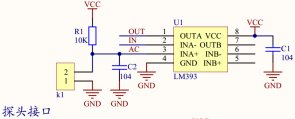
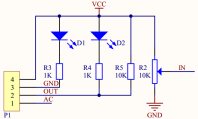
�D2.1 ���w�O(sh��)Ӌ(j��)��D 2.2 ���Ղ��������ˌ�(du��)�ⲿ���Տ�(qi��ng)�ȵĜy(c��)�����ęn���ù�����茦(du��)�����M(j��n)�Мy(c��)������D2.2.1��ʾ������裬�˹��������ؓ(f��)����(sh��)�Ĺ�����裬Ҳ�����f��������(qi��ng)�������pС���҂�ͨ�^��(sh��)�(y��n)�y(c��)���õ������������׃�������ڎװٚWķ�����ךWķ֮�g׃������(d��ng)�⏊(qi��ng)�Ⱥܴ�r(sh��)������������ֵ���_(d��)�װٚWķ����(d��ng)�ںڰ��ĭh(hu��n)���Еr(sh��)���y(c��)���������ɶ˵���ֵ�����_(d��)���ךWķ����衣 �D 2.2.1 ������� ���ˌ�(sh��)�F(xi��n)�c����������ֵ��ƥ�����裬�҂�����10K������M(j��n)��������衣ͨ����r�£�����������ֵ��ǧ�Wķ�ϣ����Ԯ�(d��ng)���Տ�(qi��ng)�Ⱥܴ�r(sh��)������������ֵ��С���M(j��n)�ЈD2.2.2�·��ݔ������̖(h��o)���Ǻ�С��늉���̖(h��o)����(d��ng)���Տ�(qi��ng)�Ⱥ�С�r(sh��)�����ڰ���r�£�����������ֵ�ܴ��M(j��n)�ЈD2.2.2�·��ݔ������̖(h��o)���ǽӽ�����Դ��늉�3.3V����늉���̖(h��o)ݔ������104����M(j��n)�ОV�����ѵõ���ƽ������̖(h��o)���Σ������Ƭ�C(j��)��(du��)��̖(h��o)��̎��������(hu��)��?y��n)���յIJ���(w��n)��������(d��o)���`�С� �D2.2.2 ���՜y(c��)����� 2.3 ���������������ֽ���Ιz�y(c��)�����������ڙz�y(c��)�Ƿ����꼰�����Ĵ�С����D2.3.1��ʾ����������ķN��У���1������(j��)��Λ_��������׃���M(j��n)�Йz�y(c��)����2�������o������׃���M(j��n)�Йz�y(c��)����3�����ù���׃���M(j��n)�Йz�y(c��)�� ���ęn���õĈD2.3.1��������z�y(c��)��Σ���(d��ng)��εε��z�y(c��)�O���ϕr(sh��)���z�y(c��)�O������͕�(hu��)�l(f��)��׃����ͨ�^�������Ϳ��ԙz�y(c��)�O��ݔ����늉�׃���� �D2.3.1 ������� ��D2.3.3��ʾ��������������·�D��ͨ�^����10K��茢������������׃���õ�늉�׃�������ͨ�^�\(y��n)�Ō�(sh��)�F(xi��n)��̖(h��o)���{(di��o)����߀��LED��ָʾ����������˽��·������r�� �D2.3.2 ��������· 2.4 �¼�λ�Â����������R(sh��)�e�¼�λ�ã��҂����üt��������M(j��n)���Д��¼ܵ�λ�ã���(d��ng)�¼��\(y��n)��(d��ng)���t����������ԙz�y(c��)�ķ�����(n��i)�r(sh��)���t���������ݔ��һ��(g��)׃������̖(h��o)��ͨ�^��Ƭ�C(j��)�xȡ���֪���¼ܬF(xi��n)���\(y��n)��(d��ng)��ʲôλ���ˡ���(sh��)��D��D2.4.1��ʾ�� 
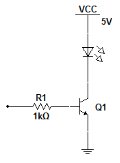
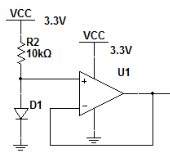
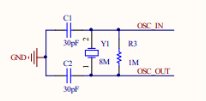
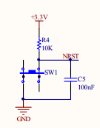
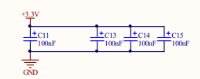
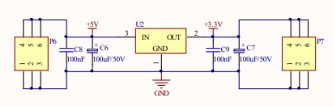
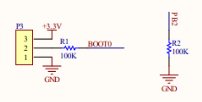
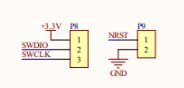
�D2.4.1 �t��z�y(c��)������ ��D2.4.2��ʾ�����O��Q����9013С�������O�ܣ���Ƭ�C(j��)ͨ�^IO���(q��)��(d��ng)���O�ܵ�b�O��ͨ�^1K����M(j��n)����������ֹ����^��������O�ܺ͆�Ƭ�C(j��)�� �t����չܵĹ������ʞ�75mW���_��늉�0.39V�����ˌ�(sh��)�F(xi��n)���գ�������D2.4.3��ʾ��NE5532�\(y��n)������늉����S�����S���չ���늉���׃������Ƭ�C(j��)ͨ�^IO���Д��xȡ��(sh��)��(j��)��ͨ�^10K����M(j��n)����������ֹ����^��������O�ܡ� �D2.4.2 �t��l(f��)���· �D2.4.3 �t������· �҂��քe���҃�(n��i)������ɂ�(g��)�ط������bһ��(g��)����������(d��ng)�¼��\(y��n)��(d��ng)���҃�(n��i)�r(sh��)�����˲��¼��\(y��n)��(d��ng)�^�ȣ�ͨ�^�t��������z�y(c��)���¼ܺ��¼�ֹͣ����(d��ng)�¼��\(y��n)��(d��ng)������r(sh��)�����˲��¼��\(y��n)��(d��ng)�^�ȣ�ͨ�^�t��������z�y(c��)���¼ܺ��¼�ֹͣ��������� 2.5 STM32������STM32ϵ�І�Ƭ�C(j��)��һ������ܡ��ͳɱ������ĵ�Ƕ��ʽ��(y��ng)�õĆ�Ƭ�C(j��)�����ă�(n��i)����ARM Cortex-M3��ST��˾��(du��)STM32�M(j��n)���ˮa(ch��n)Ʒ���֣������ֳܷɃɂ�(g��)��ͬ��ϵ�У�STM32F103��������(qi��ng)��ϵ�к�STM32F101�ǻ�����ϵ�С�����(qi��ng)��STM32F103ϵ�е�ϵ�y(t��ng)�r(sh��)��l�ʿ��_(d��)��72MHz����ͬ��еͶˮa(ch��n)Ʒ�������nj�����ߵ�һ��a(ch��n)Ʒ��STM32F101�����͵�ϵ�y(t��ng)�r(sh��)��l����36MHz������16λ�a(ch��n)Ʒ��������˾��16λ�a(ch��n)Ʒ�ڃr(ji��)�����д�����������ܣ���16λ��Ƭ�C(j��)�Ñ�����õ��x��STM32F103�cSTM32F101ϵ�ж���(n��i)��32K��128K���W�棬����һ�ӵ���SRAM����������Ǻ��ⲿ�O(sh��)��ӿڵĽM�ϡ���(d��ng)ϵ�y(t��ng)�r(sh��)犵��l�ʞ�72MHz�r(sh��)����Ƭ�C(j��)�ă�(n��i)���W��λ���_ʼ��(zh��)�г�ʼ���a��STM32����ϵ�y(t��ng)����36mA����32λ��Ƭ�C(j��)�Ј�(ch��ng)�й�����͵�һ��a(ch��n)Ʒ������l�ʱȞ�0.5mA/MHz���D2.5.1��STM32F103C8T6�Č�(sh��)��D�� �D2.5.1 STM32F103C8T6 STM32F103C8T6������48��(g��)���_��PA0��PA15�˿�A15��(g��)��PB0��PB15�˿�B15��(g��)��2��(g��)�ⲿ�������_OSC_IN��OSC_OUT��1��(g��)��(f��)λ���_NRST��2��(g��)32.768K�Č�(sh��)�r(sh��)�r(sh��)犾������_��BOOT0�����(q��)��(d��ng)�_��VDDA��VDD_1��VDD_2��VDD_3�cVSS��VSS_1��VSS_2 ��VSS_3����8��(g��)�Դ���_������ģ�M����Դ����(n��i)�˲���ARM 32λ��Cortex-M3�����72MHz�����l�ʣ������ڳ˷���Ӳ���������惦(ch��)�����Ï�64K�ֹ�(ji��)���W�����惦(ch��)�������_(d��)20K�ֹ�(ji��)��SRAM���r(sh��)犡���(f��)λ���Դ��������3.6����늺�I/O���_�����/��늏�(f��)λ(POR/PDR)���ɾ���늉��O(ji��n)�y(c��)��(PVD)��8MHz���w��ʎ������(n��i)Ƕ��(j��ng)���S�{(di��o)У��8MHz��RC��ʎ������(n��i)Ƕ��У��(zh��n)��40kHz��RC��ʎ�����a(ch��n)��CPU�r(sh��)犵�PLL����У��(zh��n)���ܵ�32kHz RTC��ʎ��������ģʽ��˯�ߡ�ͣ�C(j��)�ʹ��C(j��)ģʽ��VBAT��RTC�ͺ��Ĵ�����늣�2��(g��)12λģ��(sh��)�D(zhu��n)�Q����1us�D(zhu��n)�Q�r(sh��)�g(���_(d��)16��(g��)ݔ��ͨ��) ���D(zhu��n)�Q������0��3.6V���p�ɘӺͱ��ֹ��ܣ�߀�Ѓ�(n��i)���ضȂ���������(n��i)������7ͨ��DMA��������֧�ֵ����O(sh��)��3��(g��)���r(sh��)����ADC��SPI��I2C��USART�ȣ��{(di��o)ԇģʽ���x���Іξ��{(di��o)ԇ(SWD)��JTAG�ӿڡ���D2.5.2��ʾ�� 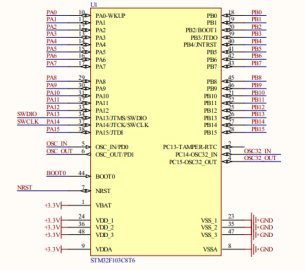 �D2.5.2 ���_�D �D2.5.3�c�D2.5.4��STM32F103C8T6���ⲿ�r(sh��)犣�����������8M�ⲿ�����M(j��n)�^��(n��i)��9���l��õ�72Mϵ�y(t��ng)�r(sh��)犣��D5�c�D6�е�30pF����c10pF��ݞ龧��Ć���(d��ng)��ݣ�����ƫ��Ҳ����ƫС��朽�8M�ľ����Ͻ�(j��ng)��ֵ��ݑ�(y��ng)ԓ�x��30pF��32.768K�����ϵ��������ܳ��^15pF�������B�ӈD��D��ʾ�� �D2.5.3 8M�r(sh��)� �D2.5.4 32.768K�r(sh��)� ��Ƭ�C(j��)��Сϵ�y(t��ng)������Ƭ�C(j��)оƬ������(f��)λ�·���D2.5.5��ʾ���Ƭ�C(j��)�ď�(f��)λ�·��SW1���(f��)λ���I�����B(t��i)���_����(d��ng)���r(sh��)���]�ϣ�R4��10K��裬���������xȡ�]�й̶���Ҫ��ͨ���xȡ10K��C5��V����ݣ���С�x��104��ݣ�Ҳ����100nF�մ���ݣ���ֹ��(f��)λ���I����(d��ng)����(d��o)��ϵ�y(t��ng)�`��(f��)λ������(d��ng)�V��ϵ�y(t��ng)�}�_�����ã����o(h��)��Сϵ�y(t��ng)������������ͨ���C(j��)е���I����һ��(g��)����(d��ng)�^�̣�����Ҫͨ�^�@��(g��)��݁�V�����I�a(ch��n)���Ķ���(d��ng)�� �D2.5.5 ��(f��)λ�· ͨ������Դ����С������(d��ng)����Ҫͨ�^ʹ�ô���݁�V���Դ����(d��ng)���D2.5.6��4��(g��)����ǿ���STM32F103C8T6���Դ���_�Ϸŵģ���ֹ�Դ���_�ж���(d��ng)��̖(h��o)�ĸɔ_��104��ݞ�ͨ�õ��xȡ��ֵ�� �D2.5.6 �V���· ���ˌ�(sh��)�F(xi��n)��Ƭ�C(j��)����������������Ҫ���Ƭ�C(j��)�ṩ��(w��n)���Ĺ���Դ���@��ʹ��LM1117���Է�(w��n)��оƬ���Ƭ�C(j��)�ṩ��(w��n)����+3.3V�Դ���D2.5.7��P6�cP7����ᘣ�����Ű�IJ�Σ�C8��C6��+5V�Դ��ݔ��V����ݣ���(w��n)��ݔ���+5V늉���ʹ��100nF�V�����l�ɔ_��100uF�V�����l�ɔ_��C9��C7��ݔ���V����ݣ���(w��n)��ݔ��늉���ʹ��100nF�V��ݔ���ĸ��l�ɔ_��100uF�V��ݔ���ĵ��l�ɔ_�����Ƭ�C(j��)�ṩ�ɿ��Ĺ���Դ�� �D2.5.7 ��(w��n)������· �D2.5.8���Ƭ�C(j��)���d��ʽ�x��ˣ������dz����(q��)��(d��ng)��ʽ�x��ˡ�STM32�����N����(d��ng)ģʽ��(du��)��(y��ng)�Ĵ惦(ch��)���|(zh��)����оƬ��(n��i)�õģ������ǣ� 1���Ñ��W�� = оƬ��(n��i)�õ�Flash�� 2��SRAM = оƬ��(n��i)�õ�RAM�^(q��)�����ǃ�(n��i)������ 3��ϵ�y(t��ng)�惦(ch��)�� = оƬ��(n��i)��һ�K�ض��ą^(q��)��оƬ���S�r(sh��)���@��(g��)�^(q��)���A(y��)����һ��Bootloader������ͨ���f��ISP�����@��(g��)�^(q��)��ă�(n��i)����оƬ���S��]�����܉��Ļ������������һ��(g��)ROM�^(q��)�� ��ÿ��(g��)STM32��оƬ�϶��Ѓɂ�(g��)���_BOOT0��BOOT1���@�ɂ�(g��)���_��оƬ��(f��)λ�r(sh��)���ƽ��B(t��i)�Q����оƬ��(f��)λ����Ă�(g��)�^(q��)���_ʼ��(zh��)�г���Ҋ�±��� BOOT1=x BOOT0=0 ���Ñ��W�憢��(d��ng)���@�������Ĺ���ģʽ�� BOOT1=0 BOOT0=1 ��ϵ�y(t��ng)�惦(ch��)������(d��ng)���@�Nģʽ����(d��ng)�ij������ɏS���O(sh��)�á� BOOT1=1 BOOT0=1 �ă�(n��i)��SRAM����(d��ng)���@�Nģʽ���������{(di��o)ԇ�� Ҫע����ǣ�һ�㲻ʹ�Ã�(n��i)��SRAM����(d��ng)(BOOT1=1 BOOT0=1)����?y��n)�SRAM��늺�(sh��)��(j��)�́Gʧ������(sh��)��r��SRAMֻ�����{(di��o)ԇ�r(sh��)ʹ�ã�Ҳ����������һЩ��;���������ϵľֲ��\�࣬��һ��С������d��SRAM���\����ϵ������·�����ô˷����x�����ϵ�Flash��EEPROM�ȡ�߀����ͨ�^�@�N���������(n��i)��Flash���x�����o(h��)����(d��ng)Ȼ����x�����o(h��)��ͬ�r(sh��)Flash�ă�(n��i)��Ҳ���Ԅ�(d��ng)������Է�ֹ�����ܛ����ؐ�� һ��BOOT0��BOOT1����������0(��)���������d����r�£�BOOT0=1��BOOT1=0 ���ُ�(f��)λ���c(di��n)�����d�����d��ɺ�BOOT0�������ӻ�0��Ҳ��BOOT0=0��BOOT1=0 �����Ԟ��˷������g�҂���BOOT1ֱ��ͨ�^100K���������ֱ�أ�ֻͨ�^BOOT1�����M(j��n)���x�����d��ʽ�� �D2.5.8 ���d��ʽ�x��λ STM32�����d��ʽ���Է֞�ɷN��ʽ����һ�N��20������JTAG���d���ڶ��N��5������SW���d��ʽ���@��ʹ��SW���d��ʽ�����Ծ��w�����ڶ��N���d��ʽ��SW���d��������������B�ӷ������±���
�D2.5.9�錍(sh��)��D�е��B�ӷ�ʽ��+3.3V��GND���Դ���_��SWDIO���d��(sh��)��(j��)�����_��SWCLK�����d��(sh��)��(j��)�ĕr(sh��)����_��NRST���Ƭ�C(j��)��(f��)λ���_��Ҳ�����d���ď�(f��)λ���_�� �D2.5.9 ���d�˿� STM32ϵ�І�Ƭ�C(j��)��(n��i)������ADģ�K�������҂�ֻ��Ҫʹ��STM32���������Ɍ�(sh��)�F(xi��n)AD�D(zhu��n)�������l��(sh��)��(j��)���a����Ƽt��l(f��)���·�Ĺ�����ʽ�� 2.6 ���M(j��n)늙C(j��)�(q��)��(d��ng)�·���M(j��n)늙C(j��)����ULN2003�M(j��n)���(q��)��(d��ng)��ULN2003��ST��˾���µ�һ��M(j��n)늙C(j��)�(q��)��(d��ng)�ĸ�����оƬ�����͉����������(f��)�Ͼ��w����У����߂�(g��)��NPN ��(f��)�Ͼ��w�ܽM�ɡ�оƬ��(n��i)��ԭ��D��D2.6.1��ʾ��߉�Ƿ���ġ� 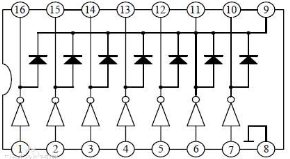
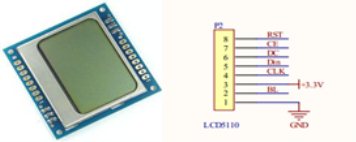
�D2.6.1 ULN2003��(n��i)��ԭ��D ��Ƭ�C(j��)ͨ�^IO����ݔ���(q��)��(d��ng)ULN2003��ݔ����̖(h��o)����?y��n)��Ƭ�C(j��)��IOݔ��������ʲ������(q��)��(d��ng)���M(j��n)늙C(j��)�����Բ���ULN2003�����(q��)��(d��ng)оƬ�(q��)��(d��ng)���M(j��n)늙C(j��)��ULN2003ݔ�������̖(h��o)ֱ�ӽӵ����M(j��n)늙C(j��)�����_�ϣ���D2.6.2��ʾ�� �D2.6.2 ���M(j��n)늙C(j��)�(q��)��(d��ng)�· 2.7 Һ���@ʾ������Nokia5110Һ�����Ĵ�(y��u)�c(di��n)�����x�������@ʾģ�K����D3-6-1��ʾ�� 1)�ԃr(ji��)�ȸߣ�LCD1602�����@ʾ32��(g��)�ַ�����Nokia5110�����@ʾ15��(g��)�h�֣�30��(g��)�ַ���Nokia5110�����H8.8Ԫ��LCD1602һ��15Ԫ���ң�LCD12864һ��50~70Ԫ�� 2)�ӿں�(ji��n)�Σ��H�ĸ�I/O�������(q��)��(d��ng)��1602��11��I/O����12864��12���� 3)�ٶȿ죬��LCD12864��20������LCD1602��40���� 4) Nokia5110����늉�3.3V�������@ʾ�r(sh��)�������200uA���£����е��ģʽ���m��늳ع�늵ı�yʽ�Ƅ�(d��ng)�O(sh��)�䡣 5110Һ�������_���x��RST��(f��)λ���_��CEƬ�x���_��DC��(sh��)��(j��)/�����ГQ���_��Din��(sh��)��(j��)ݔ�����_��CLK�r(sh��)����_��BL�����_�P(gu��n)���_��5110���늉�����+3V��+5V���҂���������+3.3V����D2.7.1��ʾ�� �D2.7.1 5110Һ�� �D2.7.2 Һ���ӿ� 51110Һ���ĸ����_���x������ʾ�� ���_̖(h��o) ���_�� ���� ��ע 1 GND �� 2 BL ��������_ ���ƽ���_���������t�෴ 3 VDD �Դݔ���_ 3.3-5V(���]ʹ��3.3V)����(d��o)��z�B�� 4 CLK ͬ���r(sh��)�ݔ�� ��߿��_(d��)4Mbps 5 DIN ��(sh��)��(j��)ݔ�� �r(sh��)������زɘ� 6 D/C ��(sh��)��(j��)/�����ГQ 0�����1����(sh��)��(j��) 7 CE Ƭ�x��̖(h��o) ���ƽ��Ч 8 RST ��(f��)λ��̖(h��o)ݔ�� ���ƽ��Ч Һ��ģ�K��(n��i)����ԭ��D��D2.7.3��ʾ��  
�D2.7.3 5110Һ����(n��i)��ԭ��D �D2.8 ���I�· 2.8 ���I�·��D2.8��ʾ�����I�·�D������10K���z�y(c��)���I��r����(d��ng)���I���º�ݔ���ƽ�ǵ��ƽ0����(d��ng)���I̧���ݔ��늉��Ǹ��ƽ3.3V��
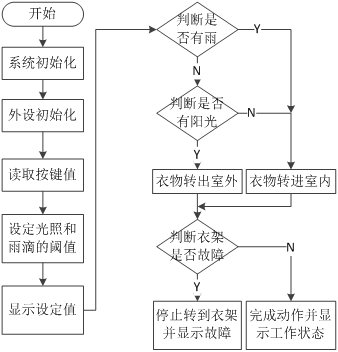
3 ���چ�Ƭ�C(j��)�ĵ���������ϵ�y(t��ng)��ܛ���O(sh��)Ӌ(j��)ܛ�����ֲ���C�Z���M(j��n)�о������_�l(f��)�h(hu��n)���x��keil4�����Æ�Ƭ�C(j��)�M(j��n)�вɼ����ա���ɂ�(g��)�ⲿ�����̖(h��o)����ͨ�^��Ƭ�C(j��)�������D(zhu��n)�¼ܣ����D(zhu��n)�¼�ͨ�^���M(j��n)늙C(j��)�M(j��n)���{(di��o)��(ji��)����(d��ng)�ⲿ���磬�ҟo��r(sh��)�����¼��D(zhu��n)�������������(d��ng)������ߛ]��ꖹ�r(sh��)���D(zhu��n)���҃�(n��i)����ֹ�����������Ѻڡ� 3.1 ϵ�y(t��ng)�����ⲿ���Ĺ��պ�������r�����±�1�� ��1 �ⲿ���Ĺ��պ������� �����҂�����ͨ�^����l(f��)�F(xi��n)��ֻ�Ю�(d��ng)�ⲿ��������죬�қ]����ĕr(sh��)�������ǿ����M(j��n)������ģ������l���£�����Ҫ�������û��҃�(n��i)�� 3.2 ܛ���㷨�㷨�������(du��)��ϵ�y(t��ng)��ʼ�������O(sh��)��ʼ����ͨ�^���I�O(sh��)�����պ���ε��ֵ����Q����ô�ӵĹ��Տ�(qi��ng)�Ⱥ���ô�ӵ���Ώ�(qi��ng)�ȣ�����ʹ�¼ܳ�ȥ�����ص��҃�(n��i)��֮����Д��Ƿ����꣬�Ƿ��й��գ������_(d��)������(y��ng)��(qi��ng)�ȵĹ��պ͛]����r(sh��)�ͳ�ȥ����������������M(j��n)�҃�(n��i)�������Еr(sh��)�C(j��)��Ҳ��(hu��)���|���o������������Ҫ�z���¼��Ƿ��й��ϣ����й��ϣ���ͣ�������o���Ͼ������һ��?j��ng)]����ɵĄ�(d��ng)�������ص��҃�(n��i)���߳������� �D3.2 �㷨���̈D 3.3 ܛ�����e(cu��)̎�������۷e�r(sh��)�g���Д��¹ʣ��҂�ͨ�^��(sh��)�(y��n)�ɵî�(d��ng)�¼��҃�(n��i)�����⣬���ߏ�����҃�(n��i)���\(y��n)��(d��ng)�r(sh��)�g�����20�����ң��҂��۷e�r(sh��)�g��(d��ng)���^30��r(sh��)���҃�(n��i)�¼�λ�Â�����߀�]�Йz�y(c��)���¼ܻص��҃�(n��i)�������f���l(f��)�����¹ʣ�ͬ�������҃�(n��i)������Ҳ����������¼�λ�Â������z�y(c��)�¼ܣ���(d��ng)���^30��r(sh��)߀�]�Йz�y(c��)���¼ܣ��ͱ�ʾ�l(f��)�����ϡ�
4 ��(sh��)�(y��n)�{(di��o)ԇͨ�^��(sh��)�(y��n)�{(di��o)ԇ�õ��D4.1��4.2��4.3��4.4�����Կ�����(sh��)�F(xi��n)�\(y��n)���������ҿ��С���(d��ng)�ⲿ���磬�ҟo��r(sh��)�����¼��D(zhu��n)�������������(d��ng)������ߛ]��ꖹ�r(sh��)���D(zhu��n)���҃�(n��i)����ֹ�����������Ѻڡ� �D4.1 ���I�O(sh��)���ֵ �D4.2 ��ꖹ��¼ܳ��� �D4.3 �¼��_(d��)���O(sh��)��λ��ͣ�� �D4.4 �����¼ܻ��҃�(n��i)
5 �Y(ji��)Փ�cչ�����ęn�O(sh��)Ӌ(j��)����(sh��)�F(xi��n)�˻��چ�Ƭ�C(j��)����������ϵ�y(t��ng)��ͨ�^��(sh��)�(y��n)�{(di��o)ԇ����(d��ng)�ⲿ���磬�ҟo��r(sh��)���¼��D(zhu��n)�������������(d��ng)������ߛ]��ꖹ�r(sh��)���D(zhu��n)���҃�(n��i)�����Ҫ�����������Uȫ�Ԅ�(d��ng)��������(sh��)�F(xi��n)�o�˲ٿأ����U�Ѓɂ�(g��)λ�ã����ȥ���s���������M(j��n)��λ�Ùz�y(c��)�����U���ȥ�r(sh��)�����_(d��)ָ��λ���܉�ͣ������ܛ�����e(cu��)̎�������U��s�^�����������N�ϵK���܉�ͨ�^ܛ�����e(cu��)̎���ֹͣ��ʹ�ù������������ڕr(sh��)��?q��)��·��ջ��������(x��)r�����ꖹ����ҵĕr(sh��)�����ȥ����ʹ���������������ĕr(sh��)��?q��)��·��ջ������?sh��)�`���ȿ����{(di��o)��(ji��)����(d��ng)�B(t��i)�O(sh��)�ã������I+Һ���@ʾ������5V��늣�5V�Դ���o��Ƭ�C(j��)��늙C(j��)�� ���ęn��(sh��)�F(xi��n)����������ϵ�y(t��ng)��߀��Ҫ�Y(ji��)���Ј�(ch��ng)����(du��)�¼ܵĽY(ji��)��(g��u)������ʽ���������D(zhu��n)߀��������s��ǰ����s�ȣ��M(j��n)һ������ϵ�y(t��ng)��ʹ֮�M���Ј�(ch��ng)�����õĞ�͑�����(w��)
�� �xֵ���ęn�������֮�H���������P(gu��n)�ĺ͎����ҵ����ѱ�ʾ���ĵĸ��x�����ȣ�Ҫ���x�ҵČ�(d��o)����������������ώ��ľ���ָ��(d��o)���H���P(gu��n)���£�������˱��n�}Ӳ��ϵ�y(t��ng)�Ĵ���O(ji��n)��ϵ�y(t��ng)���_�l(f��)�͌�(sh��)�(y��n)�����Լ��ęn���ȹ�������(d��o)���Y���ČW(xu��)�R(sh��)����(y��n)֔(j��n)?sh��)đB(t��i)�ȡ���(sh��)�ľ����Լ����еĂ�(g��)��Ʒ�|(zh��)���o����������̵�ӡ��ʹ������K��������������oՓ���ڌW(xu��)�I(y��)��߀���������Ќ�(d��o)�����o���ҟo�������P(gu��n)�ѣ�����(du��)���ҵķ��e(cu��)����̹�\�c�H��Ⱦ���ҡ���˙C(j��)��(hu��)����Ҫ�����ώ��������\�����x�⣡ ���������ͬ�����ѵ������ҵČW(xu��)�I(y��)�������нo����Ī���֧�ֺ͎������c�����������M(j��n)���Ŀ옷���֓�(d��n)ʧ���Ŀ����������е����£����x�ҵĎ��֣�����?c��)��ҵČW(xu��)��(x��)�^��������(d��o)��ǰ�M(j��n)�����Ұ����n�}���M(j��n)�ȣ��ҽ�����ęn���������P(gu��n)���Ƿֲ��_�ġ����x���ܡ����Â��ğo˽���������x��W(xu��)���g�o���ṩ�������ώ���ͬ�W(xu��)�� �����Ҫ���x�ҵ������H��������W(xu��)�����нo����һ؞��֧�ֺĄ�(l��)��
���1�DA ��(sh��)��D
���2- #include "led.h"
- #include "delay.h"
- #include "sys.h"
- #include "key.h"
- #include "usart.h"
- #include "key.h"
- #include "nokia_5110.h"
- #include "adc.h"
-
- void motor_forward(void);
- void motor_back(void);
-
- int main(void)
- {
- while(1)
- {
- key = KEY_Scan();
- switch(key)
- {
- case 1:
- {
- k=0;
- light_set++;
- if(light_set >= 10)
- light_set = 0;
- }
- break;
- case 2:
- {
- k=0;
- rain_set++;
- if(rain_set >= 10)
- rain_set = 0;
- }
- break;
- default:
- k++;
- break;
- }
- delay_ms(5);
- sprintf(str,"light_set:%d",light_set);
- LCD_write_String(0,1,str);
- sprintf(str,"rain_set:%d",rain_set);
- LCD_write_String(0,3,str);
- if(k>=1000)
- break;
- }
-
- while(1)
- {
- light = Get_Adc_Average(0,10);
- light = light/410;
- rain = Get_Adc_Average(1,10);
- rain = rain/410;
- son = Get_Adc_Average(2,10);
- son = son/410;
- soff = Get_Adc_Average(3,10);
- soff = soff/410;
-
- sprintf(str,"light:%d",9-light);
- LCD_write_String(0,0,str);
- sprintf(str,"light_set:%d",light_set);
- LCD_write_String(0,1,str);
- sprintf(str,"rain:%d",9-rain);
- LCD_write_String(0,2,str);
- sprintf(str,"rain_set:%d",rain_set);
- LCD_write_String(0,3,str);
- sprintf(str,"state:%d %d",son,soff);
- LCD_write_String(0,4,str);
- sprintf(str,"state:off");
- LCD_write_String(0,5,str);
-
- }
-
- }
-
- void motor_forward(void)
- {
- MOTOR1 = 0;
- MOTOR2 = 1;
- MOTOR3 = 1;
- MOTOR4 = 1;
- delay_ms(10);
- MOTOR1 = 1;
- MOTOR2 = 0;
- MOTOR3 = 1;
- MOTOR4 = 1;
- delay_ms(10);
- MOTOR1 = 1;
- MOTOR2 = 1;
- MOTOR3 = 0;
- MOTOR4 = 1;
- delay_ms(10);
- MOTOR1 = 1;
- MOTOR2 = 1;
- MOTOR3 = 1;
- MOTOR4 = 0;
- delay_ms(10);
- }
- void motor_back(void)
- {
- MOTOR1 = 1;
- MOTOR2 = 1;
- MOTOR3 = 1;
- MOTOR4 = 0;
- delay_ms(10);
- MOTOR1 = 1;
- MOTOR2 = 1;
- MOTOR3 = 0;
- MOTOR4 = 1;
- delay_ms(10);
- MOTOR1 = 1;
- MOTOR2 = 0;
- MOTOR3 = 1;
- MOTOR4 = 1;
- delay_ms(10);
- MOTOR1 = 0;
- MOTOR2 = 1;
- MOTOR3 = 1;
- MOTOR4 = 1;
- delay_ms(10);
- }
 word�ęn.doc
(4.39 MB, ���d��(sh��): 136)
word�ęn.doc
(4.39 MB, ���d��(sh��): 136)
2021-9-29 04:49 �ς�
�c(di��n)���ļ������d����
���d�e��: �ڎ� -5
| 



 [��(f��)��朽�]
[��(f��)��朽�]

 ����TQQ:125739409;���g(sh��)����QQȺ281945664
����TQQ:125739409;���g(sh��)����QQȺ281945664













 QQ���Ѻ�Ⱥ
QQ���Ѻ�Ⱥ QQ���g
QQ���g �vӍ��
�vӍ�� �vӍ����
�vӍ���� �ղ�
�ղ� ����
���� �
� ��
��") ���� 2#
���� 2#
 �x�x
�x�x