|
|
目錄
第一章 引言 1
11 概述 1
12 論文結(jié)構(gòu) 2
第二章 設(shè)計(jì)原理 3
21 車模直立原理 3
22 平衡控制 4
23 速度控制 8
24 方向控制 9
第三章 電路設(shè)計(jì) 11
31 電源模塊設(shè)計(jì) 11
32 電機(jī)驅(qū)動(dòng) 12
33 傳感器模塊 13
331 加速度計(jì) 13
332 陀螺儀 13
333 電感運(yùn)放 14
334 速度傳感器模塊 14
第四章 機(jī)械設(shè)計(jì) 15
41 電池的安裝 15
42 電感的安裝 15
43 干簧管的安裝 15
45 陀螺儀與加速度計(jì)的安裝 15
46 電路板的固定及安裝 15
第五章 軟件設(shè)計(jì) 17
51 整體框架 17
52 控制算法 18
521 角度控制 18
522 方向控制 19
523 速度控制 19
第六章 各項(xiàng)參數(shù)
21 第七章 結(jié)論
22 參考文獻(xiàn)
I 附錄 A 程序核心源代碼 II
第一章 引言
1.1 概述
全國大學(xué)生智能汽車競賽以智能汽車為研究對象,是倡導(dǎo)創(chuàng)新與發(fā)展的的 科技類競賽,在全國范圍內(nèi)具有很大的影響力與規(guī)模。廈門大學(xué)智能車隊(duì)今年 也繼續(xù)在學(xué)校的支持下,積極地參與了本次競賽,我們南強(qiáng)至誠隊(duì)作為電磁直 立組別隊(duì)伍,經(jīng)過一年的備賽,即將迎來最后的決賽。
本屆比賽中電磁組使用直立車模,跑道上有直線道路、曲線道路、十字交 叉路口、坡道等元素,具有一定難度。但是通過老師和學(xué)長學(xué)姐的耐心指導(dǎo), 以及我們?nèi)杖找挂沟膶W(xué)習(xí)和研究,我們最終完成了一套合理高效的設(shè)計(jì)方案。 在這份技術(shù)報(bào)告中,詳細(xì)闡述了我們在算法、電路、機(jī)械、參數(shù)等方面的設(shè)計(jì), 凝聚了我們的汗水與心血。
近一年的備賽過程,大大提高了我們在控制、信號(hào)處理、單片機(jī)、電路等 方面的知識(shí)儲(chǔ)備量,加強(qiáng)了我們的自主學(xué)習(xí)與文獻(xiàn)查找的能力,也提升了我們 的團(tuán)隊(duì)意識(shí)、上進(jìn)心與責(zé)任感。最后,我們由衷地對大力支持此項(xiàng)競賽的學(xué)校 表示感恩,也對一路走來的老師和隊(duì)友們表示感謝。
1.2 論文結(jié)構(gòu)
第二章 設(shè)計(jì)原理

70.017.jpg (25 KB, 下載次數(shù): 68)
下載附件
2018-1-12 23:48 上傳
2.1 車模直立原理
據(jù)比賽規(guī)則可知,存在許多方案使車模保持直立。由于只有兩個(gè)由電機(jī)驅(qū) 動(dòng)的后輪,因此從控制角度可把車模作為控制對象,它的控制輸入量是兩個(gè)電 機(jī)的速度。車模運(yùn)動(dòng)的目的可分解為三個(gè)基本任務(wù):
a.車模的平衡控制 b.車模的方向控制 c.車模的速度控制

圖 2.1 車模運(yùn)動(dòng)分解 三個(gè)分解后的任務(wù)可視作是各自獨(dú)立的,然而由于最終都是面向同一個(gè)控制對象,所以它們之間存在著耦合。為了方便分析,在分析其中某一方面時(shí)假 設(shè)其它控制對象都已經(jīng)達(dá)到穩(wěn)定。比如在速度控制時(shí),需要車模已經(jīng)能夠保持直立控制和方向控制穩(wěn)定;在方向控制的時(shí)候,需要車模能夠保持平衡和速度恒定;同樣,在車模平衡控制時(shí),也需要速度和方向控制也已經(jīng)達(dá)到平穩(wěn)。 車模的平衡是重中之重,由于車模同時(shí)受到三種控制的影響,從車模平衡
控制的角度來看,其它兩個(gè)控制就成為它的干擾。因此對車模速度、方向的控制應(yīng)該盡量保持平滑,以減少對于平衡控制的干擾。以速度調(diào)節(jié)為例,需要通 過改變車模平衡控制中車模傾角設(shè)定值,從而改變車模實(shí)際傾斜角度。為了避 免影響車模平衡控制,這個(gè)車模傾角的改變需要非常緩慢的進(jìn)行。
2.2 平衡控制
車模的平衡控制的實(shí)現(xiàn)是通過負(fù)反饋的方法,通過抵消輪子在一個(gè)維度上 的傾斜的趨勢便可保持平衡。

圖 2.2 通過車輪運(yùn)動(dòng)保持平衡 通過陀螺儀和加速度計(jì)構(gòu)成的互補(bǔ)濾波,便可得到車身角度。在角度反饋
控制中,與角度成比例的控制量是稱為比例控制;與角速度成比例的控制量稱 為微分控制(角速度是角度的微分)。其中比例控制相當(dāng)于回正力,微分控制相 當(dāng)于阻尼力。對系數(shù)進(jìn)行調(diào)整后,即可保持車模平衡。
第二章 設(shè)計(jì)原理
(1)加速度計(jì)
加速度計(jì)可返回三個(gè)軸方向上的加速度,只需要測量其中一個(gè)方向上的加 速度值,就可以計(jì)算出車模傾角。車模直立時(shí),固定加速度器在 Z 軸水平方向, 此時(shí)輸出信號(hào)為零偏電壓信號(hào)。當(dāng)車模發(fā)生傾斜時(shí),重力加速度 g 便會(huì)在 Z 軸方 向形成加速度分量,從而引起該軸輸出電壓變化。然而車模運(yùn)動(dòng)會(huì)引起信號(hào)發(fā) 生波動(dòng),所以還需要配合陀螺儀。
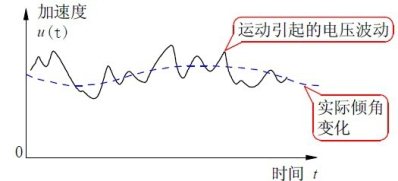
圖 2.3 車模運(yùn)動(dòng)引起波動(dòng)
(2)陀螺儀 陀螺儀可以用來測量物體的旋轉(zhuǎn)角速度。它利用了旋轉(zhuǎn)坐標(biāo)系中的物體會(huì)
受到科里奧利力的原理,在車模上安裝陀螺儀,可以測量車模傾斜角速度,將 角速度信號(hào)進(jìn)行積分便可以得到車模的傾角。
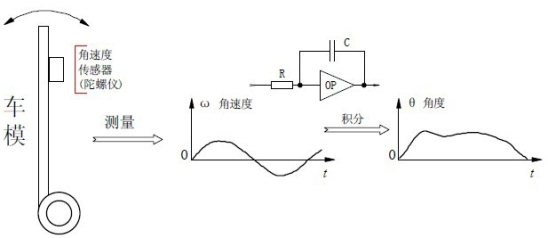
圖 2.4 陀螺儀得到角度
由于陀螺儀輸出的是車模的角速度,不受車體運(yùn)動(dòng)的影響,因此該信號(hào)中 噪聲很小。車模的角度又是通過對角速度積分而得,這可進(jìn)一步平滑信號(hào),從 而使得角度信號(hào)更加穩(wěn)定。但是從陀螺儀角速度獲得角度信息需經(jīng)積分運(yùn)算, 如果角速度信號(hào)存在微小的偏差和漂移,經(jīng)過積分運(yùn)算之后,將變化形成積累 誤差,并隨時(shí)間延長逐步增加,無法形成正確的角度信號(hào)。
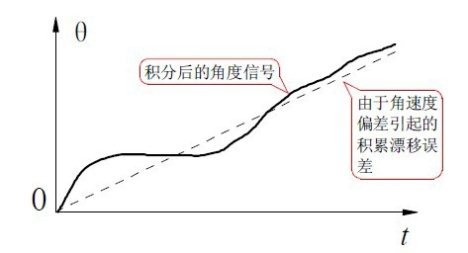
圖 2.5 積分漂移
為了得到準(zhǔn)確、噪聲小的角度值,可用加速度傳感器獲得的角度信息對陀 螺儀結(jié)果進(jìn)行校正,通過對比積分所得到的角度與重力加速度所得到的角度, 使用它們之間的偏差改變陀螺儀的輸出,從而積分的角度逐步跟蹤到加速度傳 感器所得到的角度,這樣就綜合了兩種傳感器的優(yōu)點(diǎn),避免了缺點(diǎn)。
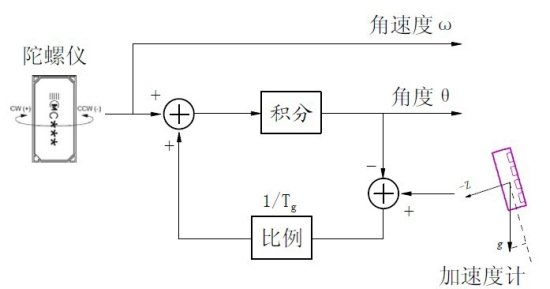
圖 2.6 通過加速度計(jì)矯正陀螺儀的角度漂移 利用加速度計(jì)所獲得的角度信息θg 與陀螺儀積分后的角度θ進(jìn)行比較,將比較的誤差信號(hào)經(jīng)過比例 1/Tg 放大之后,與陀螺儀輸出的角速度信號(hào)疊加再進(jìn)行積分。對于加速度計(jì)給定的角度θg,經(jīng)過比例、積分環(huán)節(jié)之后產(chǎn)生的角度θ必然最終等于θg。 為了避免輸出角度θ跟蹤時(shí)間過長,可以采取以下四種措施:
(1)仔細(xì)調(diào)整陀螺儀的放大電路,使得它的零點(diǎn)偏置盡量接近于設(shè)定值,并且穩(wěn)定。
(2)在控制電路和程序運(yùn)行的開始,盡量保持車模處于直立狀態(tài),這樣一 開始就使得輸出角度θ與θg 相等。此后,加速度計(jì)的輸出只是消除積分的偏移, 輸出角度不會(huì)出現(xiàn)很大的偏差。
(3)在程序運(yùn)行開始測量溫漂并去掉其影響。
(4)開機(jī)時(shí)用程序使二者快速跟隨。
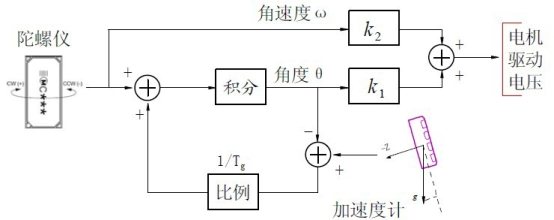
圖 2.7 角度整體控制
2.3 速度控制
對于直立車模速度的控制相對于普通車模的速度控制則比較復(fù)雜。由于在 速度控制過程中需要始終保持車模的平衡,因此車模速度控制不能夠直接通過 改變電機(jī)轉(zhuǎn)速來實(shí)現(xiàn)。
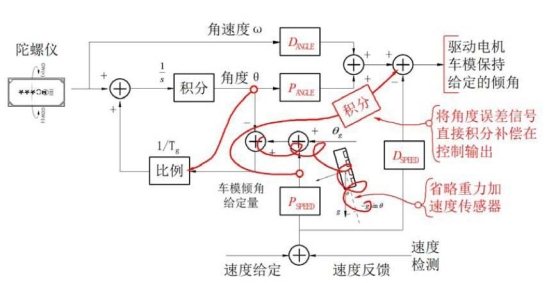
圖 2.8 角度控制 改進(jìn)后的角度和速度控制方案如下圖所示: 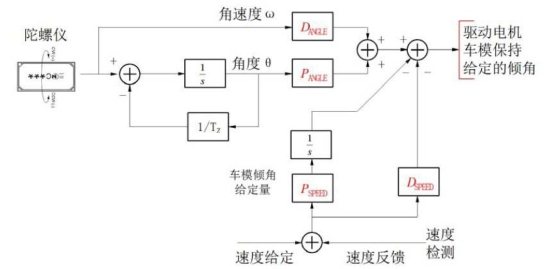 實(shí)現(xiàn)車模方向控制是保證車模沿著競賽道路比賽的關(guān)鍵。通過道路電磁中心線偏差檢測與電機(jī)差動(dòng)控制實(shí)現(xiàn)方向控制,從而進(jìn)一步保證車模在賽道上。 實(shí)現(xiàn)車模方向控制是保證車模沿著競賽道路比賽的關(guān)鍵。通過道路電磁中心線偏差檢測與電機(jī)差動(dòng)控制實(shí)現(xiàn)方向控制,從而進(jìn)一步保證車模在賽道上。
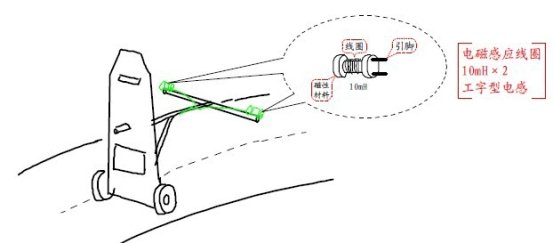
圖 2.9 電感檢測 利用電磁線偏差檢測信號(hào)分別與車模速度控制信號(hào)進(jìn)行加和減,形成左右
輪差動(dòng)控制電壓,使得車模左右輪運(yùn)行角速度不一致進(jìn)而控制車模方向。
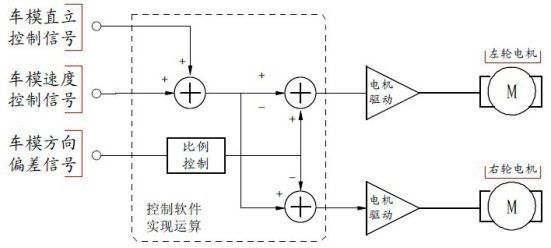
圖 2.10 電機(jī)驅(qū)動(dòng)差動(dòng)電壓來控制方向
第三章 電路設(shè)計(jì)
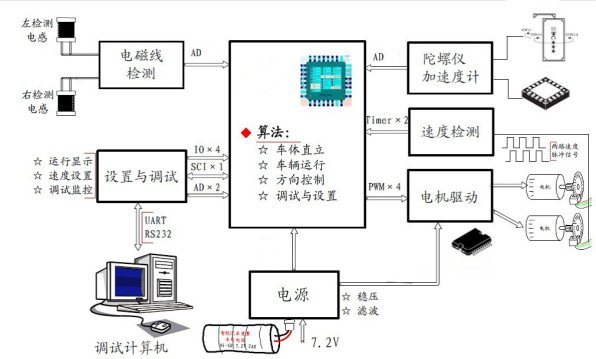
圖 3.1 電路整體框圖
3.1 電源模塊設(shè)計(jì)
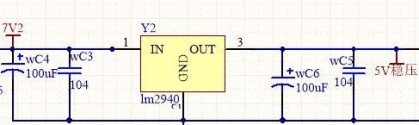
常用的電源有串聯(lián)型線性穩(wěn)壓電源(LM2940、7805 等)和開關(guān)型穩(wěn)壓電源(LM2596、LM2575 等)兩大類。前者具有波紋小、電路結(jié)構(gòu)簡單的優(yōu)點(diǎn),但是 效率較低,功耗大。我們比較使用了幾種電源穩(wěn)壓,最后選用 LM2940 穩(wěn)壓芯片。 電路圖如下:
圖 3.2 LM2940 穩(wěn)壓電路
3.2 電機(jī)驅(qū)動(dòng)
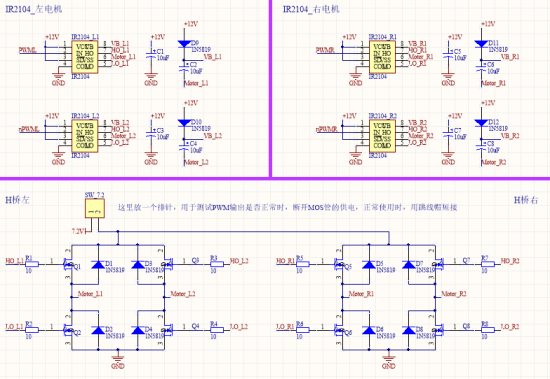
MOS 管最顯著的特性是開關(guān)特性好,所以被廣泛應(yīng)用在需要電子開關(guān)的電 路中,常見的如開關(guān)電源和馬達(dá)驅(qū)動(dòng),也有照明調(diào)光。
圖 3.3 MOS 管驅(qū)動(dòng)電路 3.3 傳感器模塊
3.3.1 加速度計(jì)
使用型號(hào)為 MMA8451,實(shí)物圖如下:
圖 3.4 加速度計(jì)
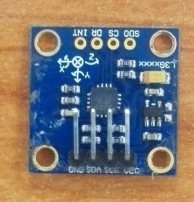
3.3.2 陀螺儀
使用型號(hào)為 LS3G4200D,實(shí)物圖如下:
圖 3.5 陀螺儀
3.3.3 電感運(yùn)放
圖 3.6 電感運(yùn)放
3.3.4 速度傳感器模塊
電機(jī)速度傳感器使用了固定在電機(jī)輸出軸上的編碼器,如下:
圖 3.7 編碼器 第四章 機(jī)械設(shè)計(jì)
4.1 電池的安裝
為了保證車模直立角度比較合理,我們的電池安裝位置保持其重心較低且 集中。
4.2 電感的安裝
本方案中共使用 5 個(gè)電感,中間兩個(gè)一字電感,兩側(cè)電感微八字,使入彎 更順暢。
4.3 干簧管的安裝
為了檢測賽道上的永磁鐵,干簧管位置要比較低,我們設(shè)置在了車子下面。
4.5 陀螺儀與加速度計(jì)的安裝
陀螺儀和加速度計(jì)應(yīng)固定在整個(gè)車模中間質(zhì)心的位置,這樣可以最大程度 減少車模運(yùn)行時(shí)前后振動(dòng)對于測量傾角的干擾。如果陀螺儀安裝不能夠保證水 平,則會(huì)影響車模過彎道時(shí)的速度。表現(xiàn)為車模在過彎道時(shí)速度變快或者變慢。
4.6 電路板的固定及安裝
我們在車上安裝了支架,將電路板用螺絲固定在支架上。

第五章 軟件設(shè)計(jì)
5.1 整體框架
本系統(tǒng)在 E 車車模基礎(chǔ)上,搭建硬件電路,使用 K60 單片機(jī)的運(yùn)算能力, 根據(jù)傳感器采集到的信息進(jìn)行控制。在功能上,本系統(tǒng)主要分為四個(gè)模塊:
1.角度控制模塊:使用加速度計(jì)和陀螺儀融合出車身角度,通過 PD控制算法維持車身平衡。
2.速度控制模塊:利用編碼器測量兩個(gè)車輪的速度,使用 PI 控制算法控 制車子行進(jìn)速度。
3.方向控制模塊:使用測得磁場分布,并根據(jù)車身狀況作出循跡決策。
4.調(diào)試模塊:使用液晶、鍵盤、藍(lán)牙模塊,能夠更加直觀地觀察車子運(yùn)行 情況,使得參數(shù)調(diào)試更加方便。
程序上電運(yùn)行后,便進(jìn)行單片機(jī)的初始化。初始化的工作包括有兩部分, 一部分是對于單片機(jī)各個(gè)應(yīng)用到的模塊進(jìn)行初始化。第二部分是應(yīng)用程序初始 化,是對于車模控制程序中應(yīng)用到的參數(shù)進(jìn)行初始化。
初始化完成后,就進(jìn)入主循環(huán),不斷進(jìn)行按鍵檢測和菜單控制,并且根據(jù) 設(shè)置發(fā)送無線。車模的直立控制、速度控制以及方向控制都是在中斷程序中完 成。通過全局標(biāo)志變量確定是否進(jìn)行這些閉環(huán)控制。
使用定時(shí)器,產(chǎn)生 2ms 的周期中斷。每次中斷都進(jìn)行角度控制與速度控制,方向控制則 20ms 執(zhí)行一次。
5.2 控制算法
70.078.jpg (16.72 KB, 下載次數(shù): 65)
下載附件
2018-1-12 23:48 上傳
第六章 各項(xiàng)參數(shù)
車模基本尺寸
車長:600mm 車寬:220mm 車高:400mm
電路功耗及電容總?cè)萘?電路功耗:約 0.7W 電容總?cè)萘浚?00uF
傳感器及伺服電機(jī)數(shù)量 加速度傳感器:1 個(gè) 陀螺儀傳感器:1 個(gè)
電感(傳感器):1 個(gè) 測速傳感器:1 個(gè) 總計(jì)傳感器:4 個(gè) 無額外的伺服電機(jī)
賽道信息檢測精度、頻率 賽道檢測精度:2cm 賽道檢測周期:2ms
第七章 結(jié)論
與其他組別相比,電磁組的抗干擾強(qiáng)高,對賽道的要求低,能夠很好的適 應(yīng)賽場環(huán)境。在地面上布一根導(dǎo)線,就可以作為小車的跑道,簡單易行。
但是,使用電磁檢測的方式不易于提高前瞻量,同時(shí),直立車必須得先保 證車模直立的情況下才考慮車模速度,所以小車速度有所限制,這使得在保證 小車行駛平穩(wěn)的前提下,提升速度有一定的困難。
通過一年的準(zhǔn)備,我們對智能車的設(shè)計(jì)、制作與調(diào)試有了更深的了解,小 車運(yùn)行良好。這一年來的備賽過程,大大提高了我們的自學(xué)能力、團(tuán)隊(duì)意識(shí), 將課堂知識(shí)引入實(shí)踐,使我們收獲頗豐,回首剛?cè)腙?duì)時(shí)迷茫的自己,我們都有 了許多成長,也有了將經(jīng)驗(yàn)和知識(shí)傳遞下去的責(zé)任感與能力。
十分感謝這一年老師、學(xué)長以及隊(duì)友們的幫助,讓我們一步步走到今天。 希望智能車比賽能一直持續(xù)下去,帶給更多人收獲與興趣。
參考文獻(xiàn)
1. 競賽秘書處: 第七屆全國大學(xué)生“飛思卡爾”杯智能汽車競賽電磁組直 立行車參考設(shè)計(jì)方案(版本 2.0). 2012.
2. 競賽秘書處: 第七屆全國大學(xué)生“飛思卡爾”杯智能汽車競賽電磁組直 立行車參考設(shè)計(jì)方案(版本 1.0). 2012.
3. 卓晴 李馬: 基于磁場檢測的尋線小車傳感器布局研究. 2009.
4. 智能車競賽秘書處: 電磁組直立車模參數(shù)整定與調(diào)試指南. 2012.
角度通過加速度計(jì)與陀螺儀的互補(bǔ)濾波得出: g_fGravityAngle = Gray_Z_Offset - angle_C; g_fGyroscopeAngleSpeed = (Gyro_X - Gyro_X_Offset) * Gyro_Raiot;
// 獲取角速度,并歸一化
g_fCarAngle = g_fGyroscopeAngle; // 車身角度為陀螺儀積分后角度
integralDriftError = (g_fGravityAngle - g_fCarAngle)/GRAVITY_ADJUST_TIME_CONYANT;
// 獲取誤差,用于矯正陀螺儀的角速度
g_fGyroscopeAngle += (g_fGyroscopeAngleSpeed + integralDriftError ) * 0.005;
// 融合后積分得到真正要用的角度 對當(dāng)前角度和設(shè)定角之間的比例項(xiàng)和微分項(xiàng)分別乘以相應(yīng)系數(shù)并相加,即
為輸出量。
fValue = (CAR_ANGLE_SET-g_fCarAngle)*Car_angle_P + Car_angle_D*(CAR_ANGLE_SPEED_SET-g_fGyroscopeAngleSpeed);
g_fAngleControlOut = fValue;
5.2.2 方向控制
方向控制同樣由比例項(xiàng)與微分項(xiàng)組成:
DirectionControlP = deviation * Car_Direction_P ; DirectionControlD = changeRate * Car_Direction_D ;
g_fDirectionControlNew = DirectionControlD + DirectionControlP;
5.2.3 速度控制
本設(shè)計(jì)方案中速度采用 PI 控制,通過積分項(xiàng)使控制穩(wěn)定。
speedoutI = SpeedControlIntegral*useSpeedI;
if(speedoutI >= integralGiven)
speedoutI = integralGiven;
speedoutP = fErrorP * useSpeedP;
g_fspeedControlOutNew = speedoutP + speedoutI;
完整的pdf格式文檔51黑下載地址:
 廈門大學(xué).pdf
(1.83 MB, 下載次數(shù): 32)
廈門大學(xué).pdf
(1.83 MB, 下載次數(shù): 32)
2018-1-12 23:53 上傳
點(diǎn)擊文件名下載附件
下載積分: 黑幣 -5
|
|













 QQ好友和群
QQ好友和群 QQ空間
QQ空間 騰訊微博
騰訊微博 騰訊朋友
騰訊朋友 收藏
收藏 淘帖
淘帖 頂
頂 踩
踩
