Altium Designer畫的L6203直流電機控制驅動器電路原理圖和PCB圖如下:(51hei附件中可下載工程文件)

0.png (55.74 KB, 下載次數: 59)
下載附件
2018-2-20 03:13 上傳
0.png (29.15 KB, 下載次數: 53)
下載附件
2018-2-20 03:13 上傳
0.png (51.75 KB, 下載次數: 54)
下載附件
2018-2-20 03:14 上傳
L6203模塊的實物圖:
image001.png (437.8 KB, 下載次數: 47)
下載附件
2018-2-19 02:08 上傳
【模塊的簡要說明】 一、尺寸:長66mmX寬33mmX高28mm
二、主要芯片:L6203
三、工作電壓:控制信號直流4.5~5.5V;驅動電機電壓7.2~30V
四、可驅動直流(7.2~30V之間電壓的電機)
五、最大輸出電流4A
六、最大輸出功率20W
七、特點:1、具有信號指示
2、轉速可調
3、抗干擾能力強
4、具有續流保護
5、可單獨控制一臺直流電機
6、PWM脈寬平滑調速(可使用PWM信號對直流電機調速)
7、可實現正反轉
8、此驅動器非常時候控制飛思卡爾智能車,驅動器壓降小,電流大,驅動能力強。 【標注圖片】
image003.png (419.24 KB, 下載次數: 50)
下載附件
2018-2-19 02:08 上傳
image004.jpg (29.36 KB, 下載次數: 50)
下載附件
2018-2-19 02:08 上傳
直流電機的控制實例 使用驅動器可以控制一臺直流電機。電機分別為OUT1和OUT2。輸入端EN可用于輸入PWM脈寬調制信號對電機進行調速控制。(如果無須調速可將EN使能端,接高低電平,高電平啟動,低電平停止。也可由單片機輸出直接控制)實現電機正反轉就更容易了,輸入信號端IN1接高電平輸入端IN2接低電平,電機正轉。(如果信號端IN1接低電平, IN2接高電平,電機反轉。)可參考下圖表:
直流電機測試程序 【原理圖】

【測試程序】 - /********************************************************************
- 實現功能:調試程序
- 使用芯片:AT89S52 或者 STC89C52
- 晶振:11.0592MHZ
- 編譯環境:Keil
- 作者:zhangxinchun 匯誠科技
- *********************************************************************/
- #include<reg52.h>
- #define uchar unsigned char//宏定義無符號字符型
- #define uint unsigned int //宏定義無符號整型
- sbit P2_0=P2^0;//啟動
- sbit P2_1=P2^1;//停止
- sbit P2_2=P2^2;//正轉
- sbit P2_3=P2^3;//反轉
- sbit P1_0=P1^0;//使能
- sbit P1_1=P1^1;//IN1
- sbit P1_2=P1^2;//IN2
- /********************************************************************
- 延時函數
- *********************************************************************/
- void delay(uchar t)//延時程序
- {
- uchar m,n,s;
- for(m=t;m>0;m--)
- for(n=20;n>0;n--)
- for(s=248;s>0;s--);
- }
- /********************************************************************
- 主函數
- *********************************************************************/
- main()
- {
- while(1)
- {
- if(P2_0==0){delay(3);if(P2_0==0)//啟動
- {
- P1_0=1;
- P1_1=1;
- P1_2=0;
- }}
- if(P2_1==0){delay(3);if(P2_1==0)//停止
- {
- P1_0=0;
- }}
- if(P2_2==0){delay(3);if(P2_2==0)//正轉
- {
- P1_1=1;
- P1_2=0;
- }}
- if(P2_3==0){delay(3);if(P2_3==0)//反轉
- {
- P1_1=0;
- P1_2=0;
- }}
- }
- }
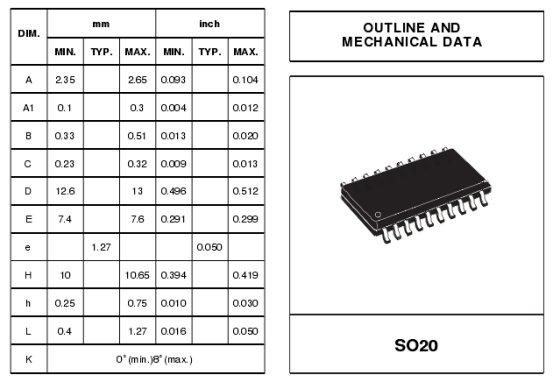
L6203 DMOS(消耗型金屬氧化物半導體)全控橋驅動器
- 供電電壓:48V
- 最大峰值電流5A(L6021最大2A)
- 電流有效值:
- L6201: 1A; L6202: 1.5A; L6203/L6201PS: 4A
- RDS (ON) 電阻值 0.3 (室溫 25 C)
- 擊穿電壓保護
- 兼容TTL電路
- 運行最高頻率100KHz
- 熱滯
- 集成邏輯電路使用
- 高效
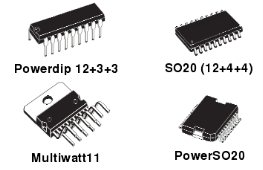
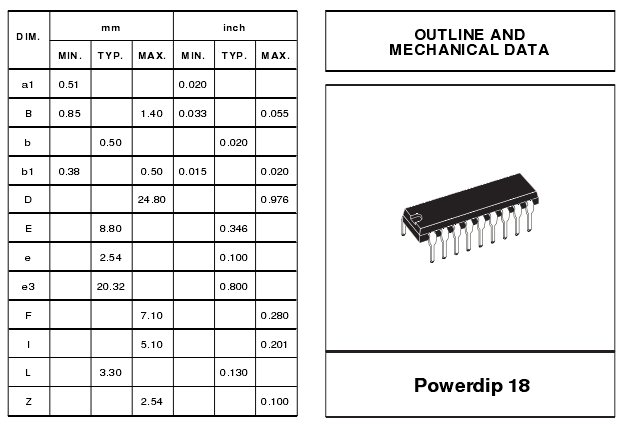
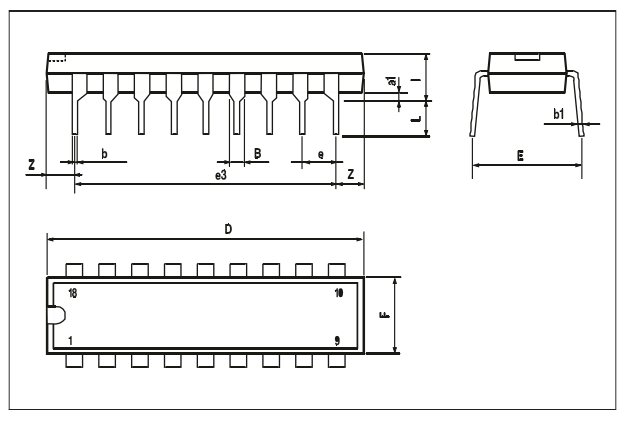
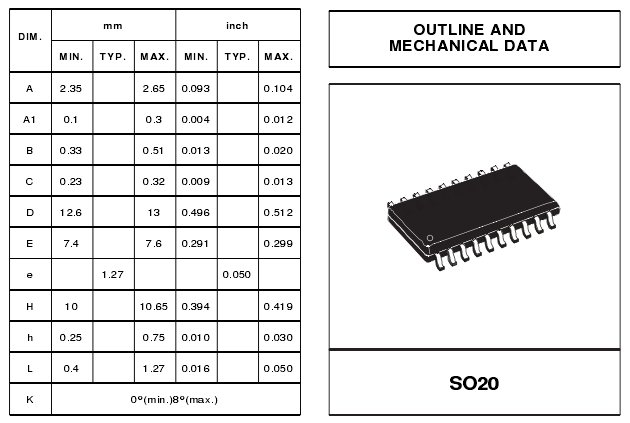
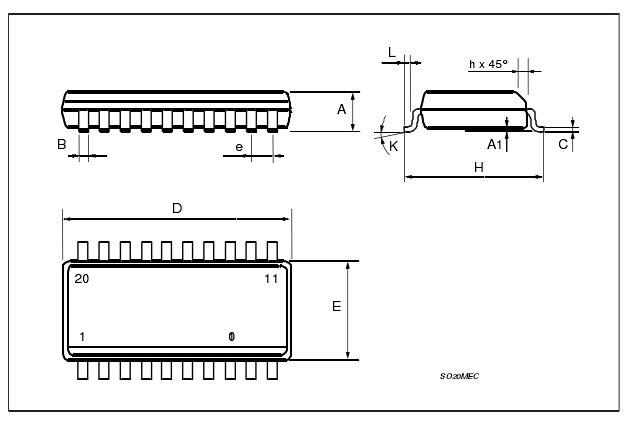
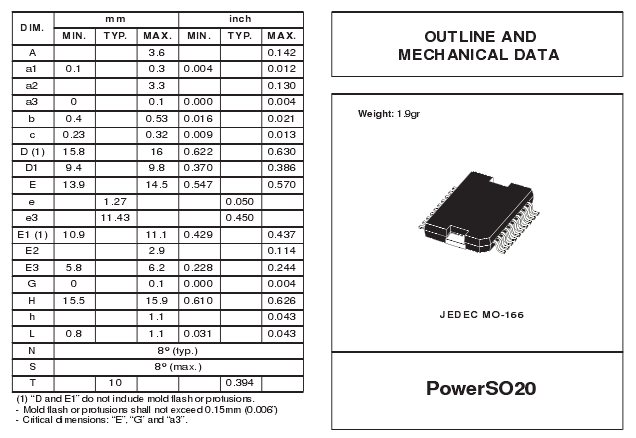
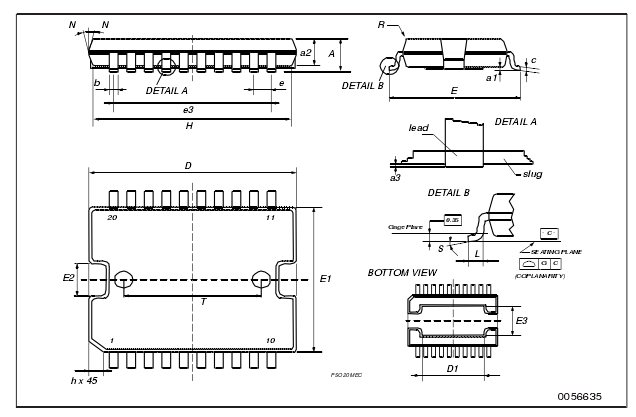
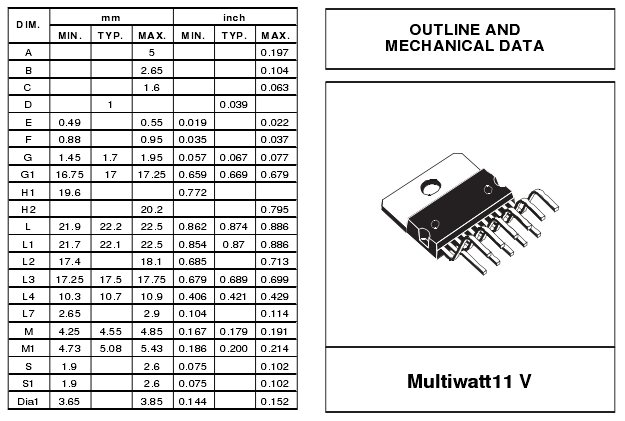
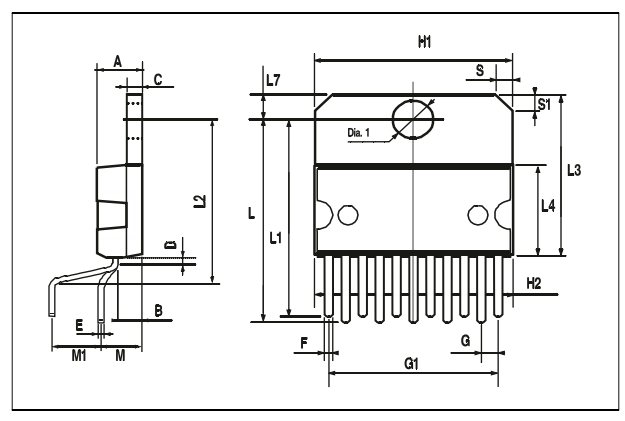
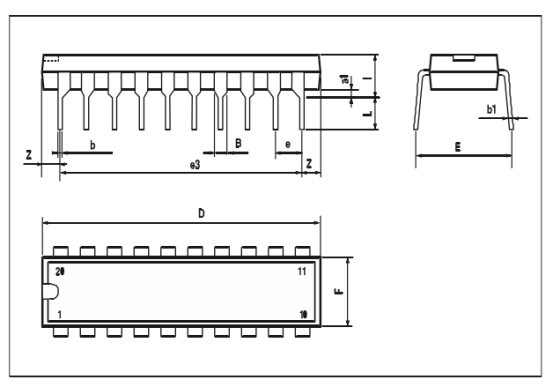
概述 L6201是一種應用多源BCD(Bipolar,CMOS,DMOS)技術來控制電機的全控橋驅動器芯片,這種芯片能將獨立的DMOS場效應晶體管和CMOS以及二極管集成在一塊芯片上。由于使用模塊化擴展技術,L6201可以實現邏輯電路及功率級的優化。DMOS場效應管能在42V的電壓下運行,同時具備高效、高速的切換性能。兼容所有的TTL, CMOS andC輸入。每個獨立的邏輯輸入能控制一個溝道(半橋),而公共的使能端可以控制兩個溝道。L6201共有3中不同的封裝型號。 分類數據: L6201(SO20表面貼片) L6201PS(PowerSO20) L6202(雙列直插封裝18引腳) L6203(Multiwatt封裝) |
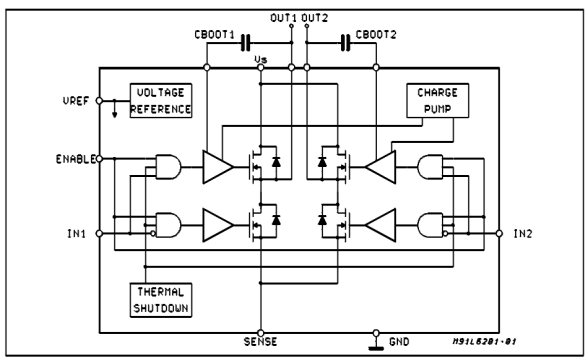
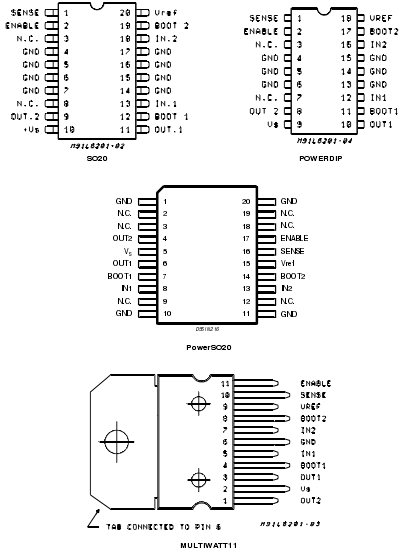
結構圖 引腳連接圖(俯視)
引腳功能 | | | | | | | | | | | | | | | | | | | | | |
| | | | | | | | | | | | | | | | | | | | | |
| | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | 內置參考電壓,通過電容充電。含有內置電阻,最大電源輸出2mA |
絕對最大額定值 | | | | | | | | | 不同的輸出端的電壓(在Out1到Out2之間)60V | | | | | | | | 脈沖輸出電流 對于L6201PS/L6202/L6203(注1) –無重復 對于 L6201 對于6201PS/L6202/L6203 直流輸出電流 對于L6201 (注1) | | | | | | | | Boostrap Peak Voltage 自舉電容峰值電壓 | | | | 總功耗 Tpins = 90°C 對于 L6201 對于 L6202 Tcase = 90°C 對于 L6201PS/L6203 Tamb = 70°C 對于 L6201 (注2) 對于 L6202 (注2) 對于 L6201PS/L6203 (注2) | | | | | | |
注1:脈沖寬度僅受節點及電熱阻抗的影響(詳見熱特征參數表) 注2:配置最小面積的銅片
熱特征參數 | | | | | | | | Rthj-pins Rthj-case Rthj-amb | 節點引腳熱電 max 最大值 節點內熱阻 max. 最大值 節點外熱阻 max. 最大值 | | | | | |
(*)安裝鋁制基片電路板
電氣特性(測試電路參數:溫度=25C ,,電壓42V,傳感電壓0V,無別的特殊要求) | | | | | | | | |
| | | | | | | |
| |
| | | |
|
|
| | | | | EN = H VIN = L EN = H VIN = H IL = 0 EN = L ( 圖. 1,2,3) |
| | | | | |
|
| | | | | |
|
| |
| | | |
|
| |
| |
晶體管 | | | |
|
| | | | |
|
|
| | | | | | 圖。9 IDS=1A L6201 IDS=1.2A L6202 IDS=3A L6201PS/03 |
| |
| | | |
| |
| | |
二極管源極,漏極 | | |
| |
| | | | IF=1A L6201 IF=1.2A L6202 IF=3A L6203 |
| |
| | | |
|
| |
| |
邏輯電平
電氣特性(續) 芯片控制邏輯時序 (*)受限于功耗 (**)在同步整流中的(L6202//03)VSD壓降如圖4所示;一般L6201的電壓值是0.3V
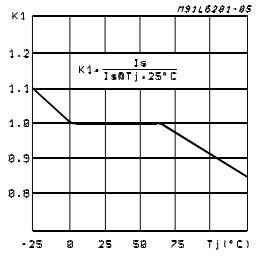
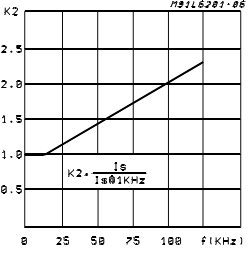
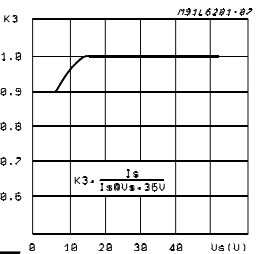
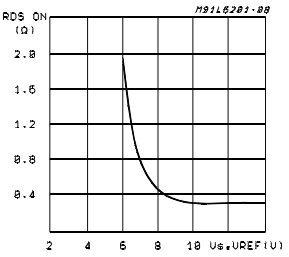
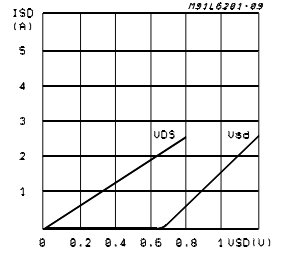
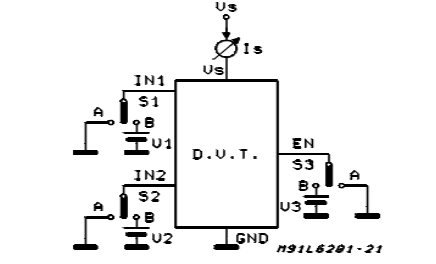
圖1。典型和Tj的示意圖 圖2。典型靜態電流和頻率的示意圖 圖3。典型Is和Vs的示意圖 圖4。典型Rds和Vref的示意圖(Vref從Vs到Vref)
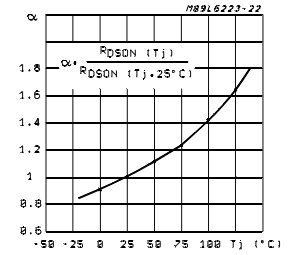
圖5。正常狀態(25°C)Rds的阻止與溫度變化的示意圖
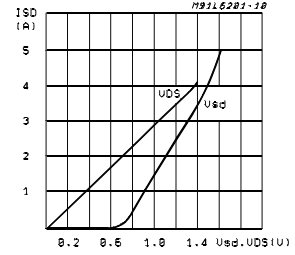
圖6(a),同步整流下二極管的狀態(L6201) 圖6(b),同步整流下二極管的狀態(L6201PS/02/03)
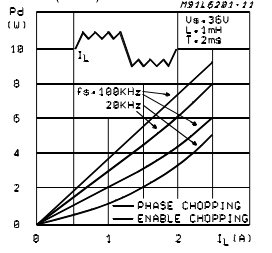
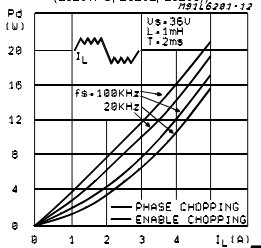
圖7(a)。典型功耗與IL的示意圖(L6201) 圖7(b)。典型功耗與IL的示意圖(L6201PS/02/03)
圖8(a)。兩相斬波
圖8(b)。單項斬波
圖8(c)。使能端斬波
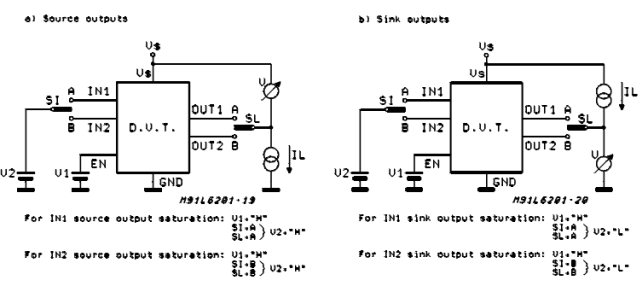
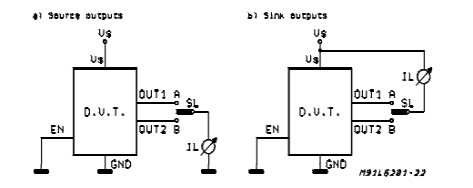
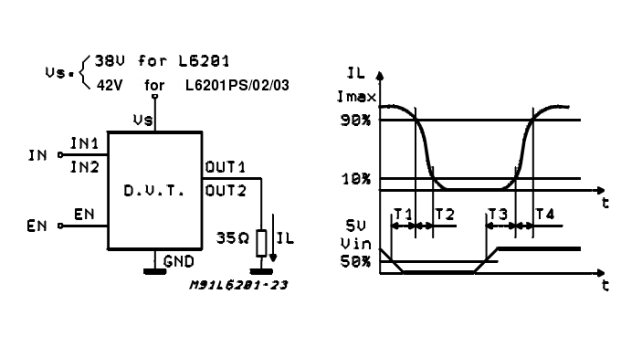
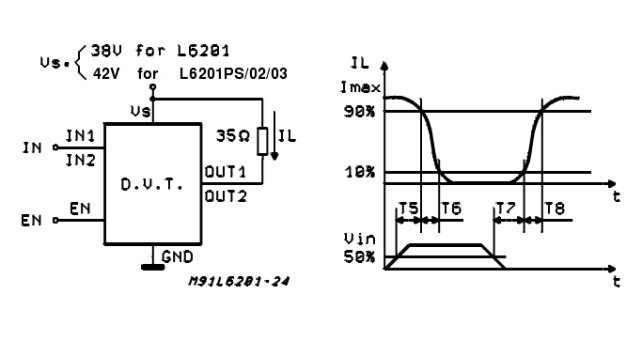
測試電路 圖9。飽和電壓 圖10。靜態電流 圖11。漏電流示意圖 圖12。源電流延遲時間及輸入斬波示意圖 圖13。反偏電流延遲時間及斬波 電路概述
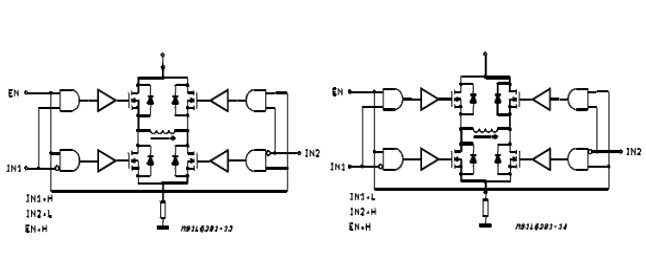
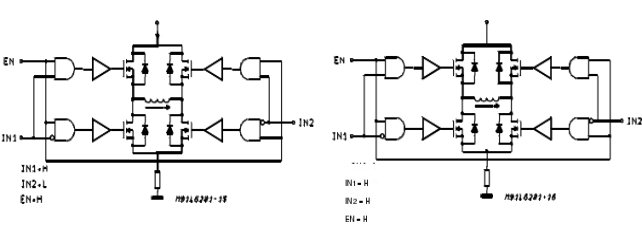
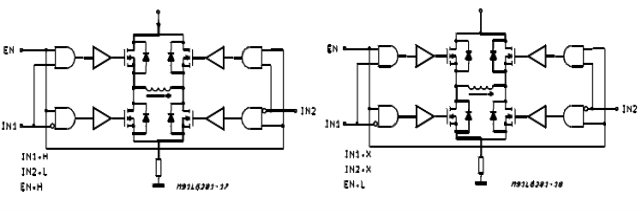
L6201/1PS/2/3是一種應用多源BCD(Bipolar,CMOS,DMOS)技術,用于電機切換驅動的整塊全橋芯片。多源BCD技術是集成多個或者單獨的DMOS場效應晶體管,另外還混合MOS管/二極管的控制電路。通過使用這種技術使得這類芯片具備兼容所有TTL,COMS和C并且可以消除外部MOS設備的驅動問題。邏輯驅動圖如表1所示。
表1 | | | | | | | Sink1,Sink2 Sink1,Source2 Source1,Sink2 Source1.Source2 | | | | |
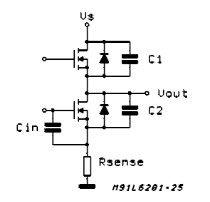
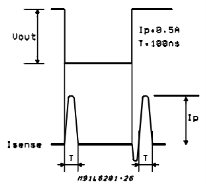
L表示低電平 H表示高電平 X表示任意狀態 (*)INPUT1和INPUT2是控制器的數字輸出級 雖然L6201/1PS/2/3這類芯片能保證被擊穿的情況的發生,但是不能避免由于DMOS管配置二極管的內部結構而引起的強電流產生的檢測熱量。這種現象的產生主要是由于與節點組合的C1和C2兩個電容充放電(如圖14)。當輸出有高電平向低電平轉換的時候,一股的尖峰電流注入電容C1。在低電平向高電平轉化的過程中同樣有一股大的尖峰電流注入電容C2,底部DMOS場效應管的輸入電容的充電導致在尖峰電流之前有電極性的跳變(如圖15)。 圖14.DMOS場效應管的內部結構 圖15.在檢測引腳的尖峰電流劉示意圖 晶體管的運轉 導通狀態 當DMOS的其中一端處于到通的狀態,那么可以說電阻RDS(ON)始終處于能操控的范圍。在此期間的功耗的表達式: PON = RDS (ON) IDS2 (RMS) 多源BCD過程的低阻態電阻RDS(ON) 在低功耗的情況選能提供高電流
關斷狀態 當DOMS的其中一端關斷的時候,那么VDS的電壓等于電壓源的電壓,同時只有漏電流IDSS存在。此間的功耗有如下的公式: POFF = VS IDSS 此時的功耗十分低,較導通時候的功耗是可以被忽略的
晶體管 幾乎可以發現,上述的晶體管的源極和溝道間內置二極管,二極管運行在一種快速,任意方向的切換模式。在下次循環之前,使能端處于與高電平的狀態,電壓降等于電阻(RDS (ON))電流(ID)的乘積直到達到二極管的正向偏置電壓。當使能端是低電平時,場效應管關斷,同時所有電流施加于二極管。在反復循環的過渡時期的功率取決于電壓—電流的波形以及驅動方式(如圖7(a),(b),圖8(a),(b),(c)) Ptrans. = IDS (t) VDS (t)
自舉電容
只有所有的N溝道在10V的柵極電壓下才能夠確保DMOS晶體管的正確驅動。對于底部的接地晶體管來說很容易證明,但是上部的晶體管顯然需要一個更高的驅動電壓。當達到內置充電電流的達到峰值的時候能結合自舉電容正確驅動。為了充電能夠有效的進行,自舉電容的值應當大于1nF的晶體管的輸入電容。所以自居電容至少是10nF的。如果自居電容的取值過小會引起場效應管的充電不充分,并導致RDS (ON)呈高阻態。另一方面來說如果使用一個高容抗的電容那么在檢測電阻上會產生尖峰電流。
參考電壓 對于一個內部含有阻抗,電壓的電路來說,應該在引腳和接地端放置一個電容。容抗為0.22 F的電容是以滿足條件。引腳可以被最大為2mA的電流擊穿,所以必須加以保護。
死區時間 為了保護橋臂中的同步電容引起的軌對軌短路電流,集成芯片提供了長于40ns的死區時間
熱電阻的保護 熱保護電路是必須具備的,一旦在節點溫度達到150攝氏度的時候,那么它就失效了。只有當溫度降到安全的范圍之內,重置驅動器,輸入和使能信號才能被控制。
應用信息 循環電路 使能端置高電平時,電路是循環的。晶體管的電壓降可以通過RDS(ON)IL的乘積表示,電壓降的大小取決于珊源極的二極管特性。雖然驅動器受傳導的保護,尖峰電流還是能夠通過內置的珊源級電容的充放電現象到達檢測引腳端。那么在這樣的一個設備中,這不是引起任何的問題的,因為檢測電阻能夠承受的電壓是被設計好的。
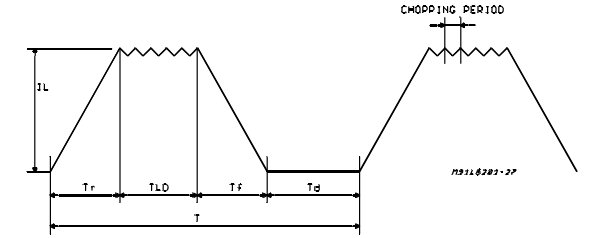
上升時間Tr(如圖16.) 在電橋的對橋臂上的電容經上升時間充電達到最大值電流IL時,此時的能量表達式: EOFF/ON = [RDS (ON)IL2Tr] 2/3
負載時間TLD(如圖16) 在此期間的功率主要是由電阻也折算側的功率組成,電阻消耗的功率: ELD = IL2 RDS (ON)2 T負載 折算側的功率: E折算 = VSILTCOMfSWITCHT負載 其中:折算側的計算時間等于導通和關斷的時間,選擇頻率等于斬波頻率
由上升時間可以推導,下降時間應該有類似的公式: EON/OFF = [RDS (ON)IL2 Tf] 2/3 靜態功耗 驅動器能耗的最后組成部分是靜態功耗,公式如下: E靜態 = I靜態 Vs T
圖16
一個周期內的能耗 ETOT = EOFF/ON + E負載 + E折算 + EON/OFF + E靜態 總功耗的計算中的變量符號含義: 功耗等于能除以周期時間 Tr表示 上升時間 TLD表示 負載驅動時間 Tf 表示下降時間 Td表示 死區時間 T 表示一個時間段 T = Tr + TLD + Tf + Td
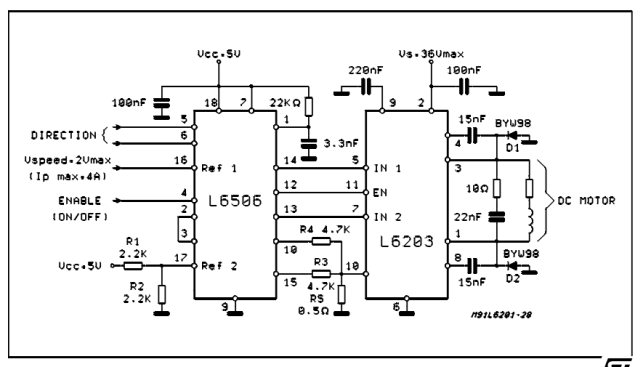
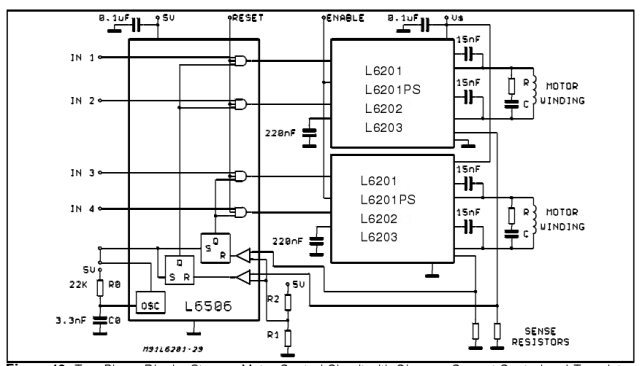
直流電機速度控制 L6201/1PS/2/3自從制造成H全橋的封裝芯片就被用作直流電機的控制。主要用于直流電機速度和方向的功率級的控制。如圖17所示,L6201/1PS/2/3能夠驅動像L6506的運用跨導放大器的電流整流器。在這樣一個實際的組態電路中中,L6506只有一半的借口唄用到,另一半可以用來驅動第二臺電機。L6506的檢測電阻上的電流是鏡像電流:能夠檢測并比較電機的調速及制動的電壓。在L6506的兩個檢測端都配置了電阻RS。如果L6506的輸出和L6203的輸入之間的連接過長的話,那么在L6203的輸入端及接地端都要加電阻。在輸出端還應該配以RC保持器,同樣型號為BYW98的二極管也被用在連接電源出入端和接地端之間。如下的公式可以用來計算保持器的數值: R VS/lp C = lp/(dV/dt) 其中:VS是源電壓的最大值;IP是負載峰值電流;dv/dt受限于上升時間的輸出電壓(一般是V/s)。如果電源沒有擊穿電流保護,那么一個適當大一點的電容可以用在連接在L6203的供電端引腳。在17號引腳的電容能夠使得芯片更好的工作。電機的的電流上線是2A。L6202可用于同樣電流,24V的電機。
圖17:雙端電機控制
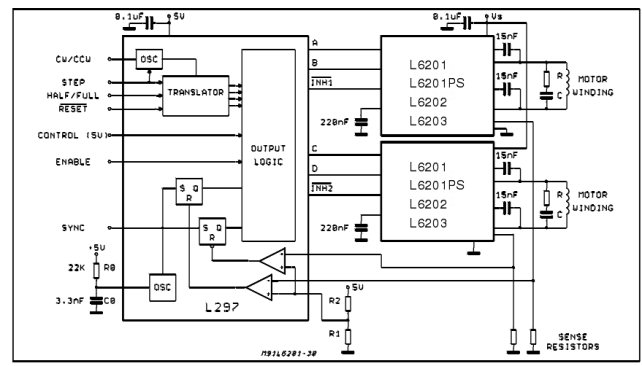
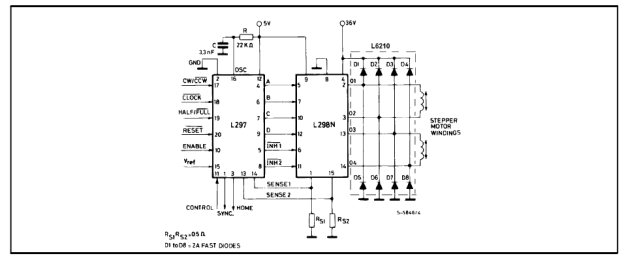
雙極進電機 雙極步進能在一片L6506或者L297,這兩種BCD全橋驅動器,并加上一些外部設備。綜合上述三種芯片才能組成一個完整的微處理器電路接口。如圖18、19所示,控制器是直接連接兩BCD驅動橋。外部擴展設備用到的是最小化的電路:一個斬波頻率電路的RC網絡,電阻(R1; R2)組成的比較器驅動,參考電壓和保持電壓是電阻和電容的串聯。(詳見直流電機的速度控制)
圖18。兩相雙極步進電機斬波控制電路
圖19。兩相雙極步進電機斬波、晶體管控制電路
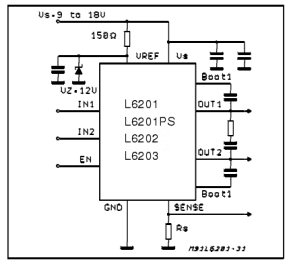
驅動電機的最小電壓可以低于規定的最低12V的電壓(詳見電氣特性表);如此,可以有這樣一個假設,適當減少電阻R DS (ON)的阻值,從而減少最后一級的供電電壓,能從圖20可以看出。
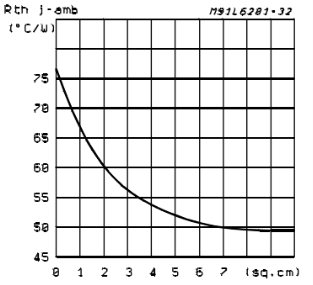
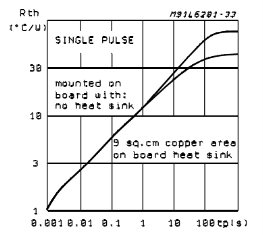
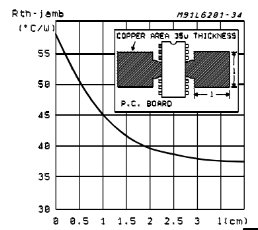
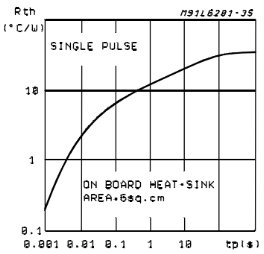
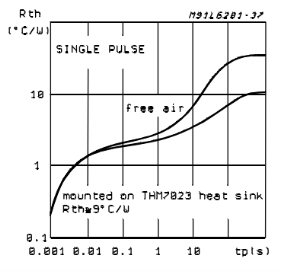
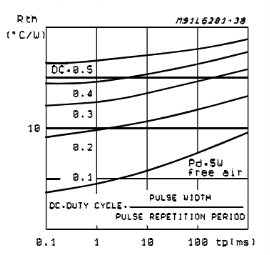
圖20L6201/1P/2/3的電壓范圍為9—18V 熱特性 基于此類驅動器的高效性能,往往不需要真正的熱擊穿或者就是很容易就能在P.C.B上做成斬波電路(L6201/2)。在重載的時候,L6203需要適當的降溫。同樣的情況,當斬波電路作用在L6201上時,如圖23,圖21指出該如何選擇的基區面積。L6201的功耗如上述表達式: RTh j-amb = (Tj max. – Tamb max) / Ptot 圖22能看出在一個脈沖寬度時間內電阻值與溫度的關系。圖23和24涉及到L6202。對于L6203還有一個附加的條件,圖25(熱電阻與周圍溫度的影響)及圖26(峰值熱電阻和脈沖寬度的關系),而圖27則是單脈沖熱阻值。
圖21.L6201的RTh J-amb與基底面積示意圖 圖22。典型電阻值與單脈沖示意圖 圖23.L6202的RTh J-amb與基底面積示意圖 圖24.L6202的典型電阻值與單脈沖示意圖
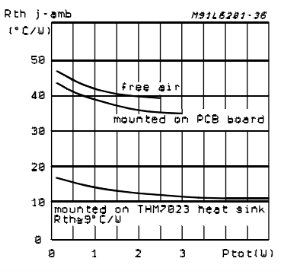
圖25. Multiwatt封裝的功耗 圖26.L6203的典型電阻值與重復脈沖示意圖 圖27.典型熱電阻脈沖寬度與周期對比系數
L297 步進電機控制器
- 常規波形驅動
- 半/全步方式
- 順/逆時針轉動方向
- 規定的開關負載電流
- 可編程負載電流
- 外接設備少
- 復位輸入&基準輸出
- 使能端輸入
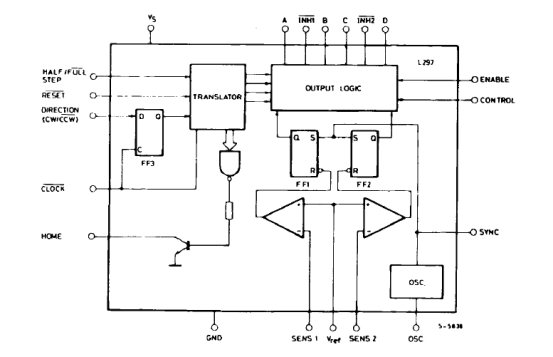
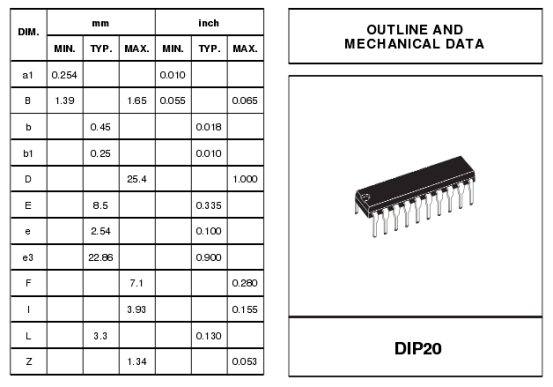
概述 L297基于微處理器技術的集成電路芯片,用做兩相雙極性或四相單極性的步進電機控制器。電機能在半步,標準波形下或者是PWM斬波電路的選擇方式下的線圈電流下驅動。這類芯片的特點:值需要時鐘信號,電機的旋轉方向的輸入信號。自從微處理器的集成化和可編程化的運用,相角控制使用大量的減少。封裝在雙列直插(20引腳)和表面貼片(20引腳)的L297被做成一整塊全橋的驅動器,在L298N、L293E或者別的驅動器的驅動下使用。  分類數據:L297/1(雙列直插20引腳) L297d(表面貼片20引腳) |
絕對最大額定值
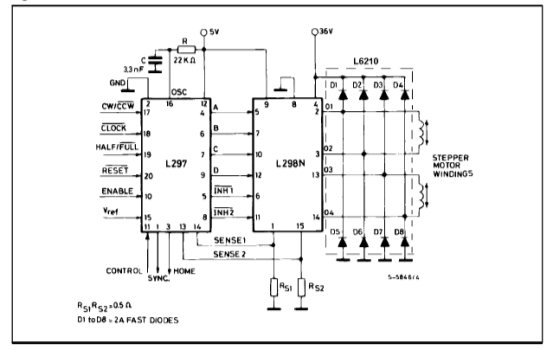
兩相雙極性步進電機控制電路
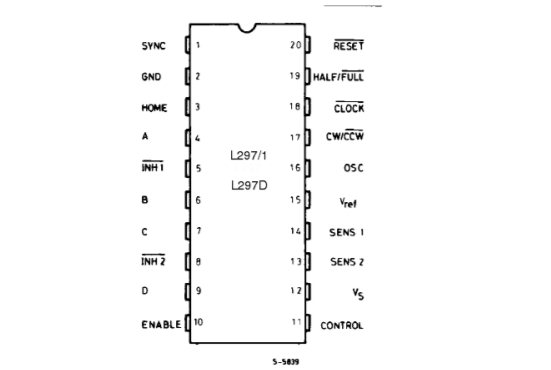
引腳圖(俯視)
結構圖(L297/1 - L297D)
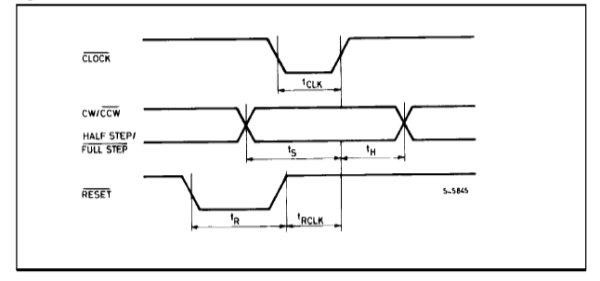
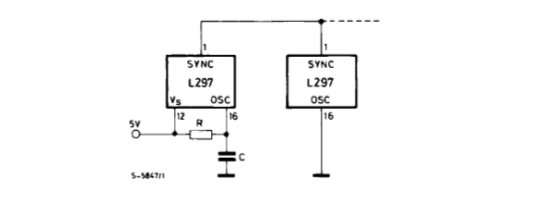
引腳功能L297/1 - L297D | | | | | 芯片輸出斬波器 在外施時鐘源輸入的情況下,同步引腳輸出端應用于連接所有L297的同步引腳和斬波器,并非單個的引腳。 | | | | | | 集電極開路輸出端。當L297的初始化(ABCD端口置0101)時能與斬波器相連。信號有效,晶體管運行 | | | | | | 低電平有效,能控制A、B相的驅動 雙極性電機在此信號驅動下,能迅速衰減線圈電流。當Control端是低電平時,也能用于斬波電路。 | | | | | | | | | 低電平有效,能控制C、D相的驅動 功能同INT1一樣 | | | | | | 芯片的使能端。置低電平時,INT1,INT2,A,B,C,和D才又能使用 | | | 控制端取決于斬波器 斬波器低電平置于INT1和INT2,或者高電平置于ABCD線上 | | | | | | | | | | | | | | | 終端的RC(R接VCC電源端,C接地)電路決定了斬波器的等級。此端口在不同的芯片的組態不一定一樣。f1/0.69 RC | | | 時鐘上升沿/下降沿控制輸入 電機的物理旋轉方向同時取決于線圈電流方向 改變電流方向能隨時改變旋轉方向 | | | 步進時鐘脈沖,低電平有效,一個時鐘脈沖驅動電機前進一步 | | | Half/Full不僅輸入。高電平為半步運行,低電平為整步運行。當L297在偶數的狀態,單相電機選擇FULL。兩相電機在晶體管奇數時選擇FULL(HOME置初始狀態) | | | 復位輸入,低電平有效。完成初始化(ABCD端口置0101) |
熱阻值數據
電路介紹 L297的主要用途是電機的驅動雙橋,大林管(復合晶體管),矩陣芯片。這類芯片受到控制器的時鐘信號,方向信號控制(一般的控制器是微處理器),并結合空如信號產生不同的功率級。 實現這些功能的主要部分是晶體管,晶體管依據電機的相序,,PWM的電流方向及線圈的方向。晶體管依據HALF/FULL引腳的選擇有三種工作方式。其一,常規方式(兩相導電),波形驅動(單相導電),半步驅動(單相導電和兩相導電的交替)。L297的兩種中斷方式也同樣能夠驅動半步,波形模式。三類信號,直接作用于L298的使能端,在線圈不導電的時候是電流衰減。當L297用作單相電機的驅動器,那么主要作用于這些線上:A,B,C,D,INT1和INT2。相線AB還有CD是交替斬波的,當一組斬波時另一組閑置,除非有中斷的信號到來。在L297和L298的組態技術中,忽略了負載的功耗。 一個共模斬波器,需要2個雙穩態多諧振蕩器(觸發器)FF1和FF2來提供脈沖。測量檢測電阻(連接在SENS1和SENS2之間),當線圈上的電流到達可編程的峰值電壓Vref,內置的同步比較器會重置2個雙穩態多諧振蕩器。期間中間將一直有效,直到斬波器的脈沖到達的時候。兩個線圈的峰值電壓,都是通過的參考電壓Vref的可編程化來實現的。在這個組態電路中,接低噪聲的通過同步斬波器被很好的克服。依賴于所有連接的SYNC引腳,RC濾波網絡和接地的OSC引腳。
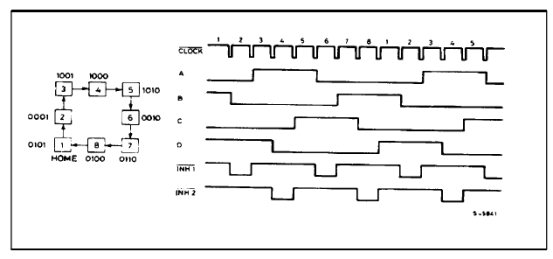
電機驅動相序 L297的晶體管能產生的相序有:常規相序,波形和半步方式。這三種驅動方式的相序及波形將在后面的章節做介紹。在所有的這些情況中,晶體管都是在高低交替的時鐘脈沖中得以實現。順時針旋轉的方向是要表明的,逆時針的相序和順時針是相似的,只需翻轉晶體管的狀態。ABCD置0101
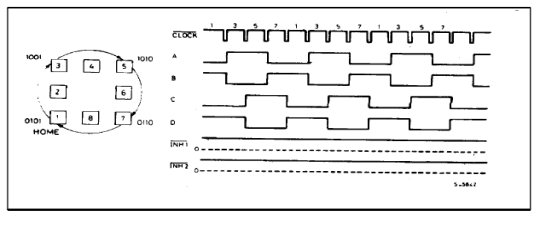
半步驅動方式 HALF/FULL置高電平時,是半步驅動模式 常規驅動方式 HALF/FULL置低電平時,是常規驅動方式 (也叫做兩相驅動) 晶體管是奇數的狀態 (1, 3, 5 或 7)。 這種方式下 INH1和INH2輸出仍舊是高電平
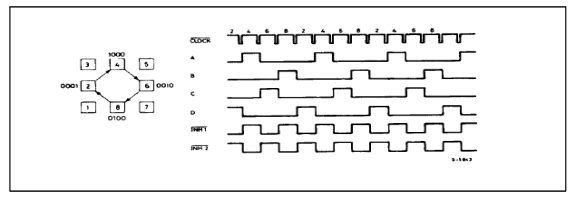
(續) 波形驅動方式 HALF/FULL置低電平時,也是波形驅動方式(也叫單相驅動) 晶體管是偶數狀態(2,4,6或者8) 電氣特性圖(如結構圖所示的情況,Tamb = 25C, Vs = 5V。無別的情形) (續)
圖1.
應用信息 兩相雙極性步進電機控制電路 兩相雙極性步進電機的線圈的電流是2A,二極管的快速電流是2A
圖2..
圖3.同步L297s
全部設計資料51hei下載地址:
| 










 QQ好友和群
QQ好友和群 QQ空間
QQ空間 騰訊微博
騰訊微博 騰訊朋友
騰訊朋友 收藏
收藏 淘帖
淘帖 頂
頂 踩
踩

