|
|
Altium Designer畫的LMD18200直流電機(jī)控制驅(qū)動(dòng)器電路原理圖和PCB圖如下:(51hei附件中可下載工程文件)

0.png (33.32 KB, 下載次數(shù): 84)
下載附件
2018-2-20 03:47 上傳
0.png (36.12 KB, 下載次數(shù): 58)
下載附件
2018-2-20 03:48 上傳
0.png (51 KB, 下載次數(shù): 54)
下載附件
2018-2-20 03:48 上傳
【簡要說明】 - 尺寸:長55mmX寬36mmX高35mm
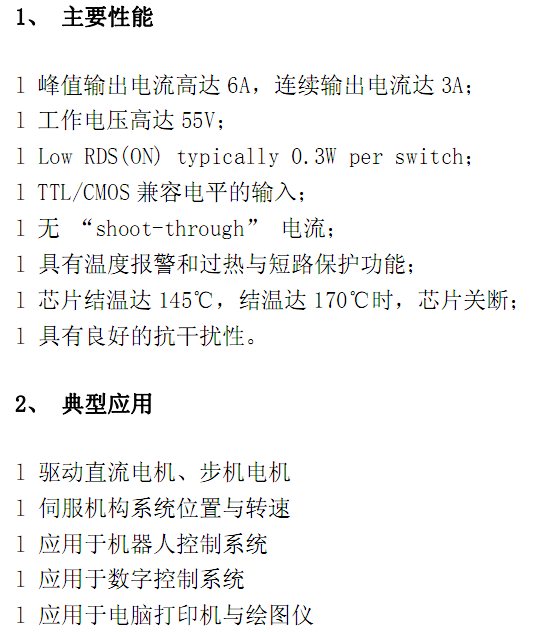
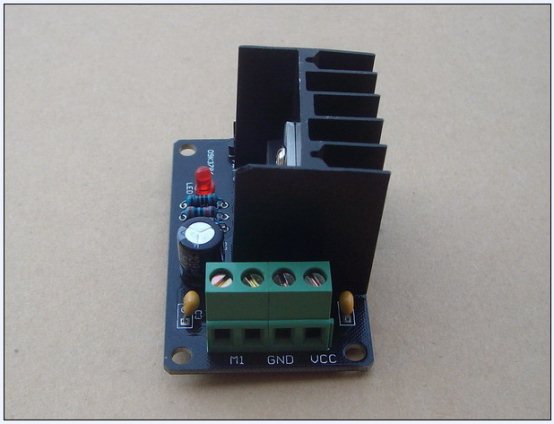
二、主要芯片:LMD18200
三、工作電壓:控制信號直流4.5~5.5V;驅(qū)動(dòng)電機(jī)電壓10~30V
四、可驅(qū)動(dòng)直流(10~30V之間電壓的電機(jī))
五、最大輸出電流3A (瞬間峰值電流6A)
六、最大輸出功率75W
七、特點(diǎn):
1、具有電源指示
2、轉(zhuǎn)速可調(diào)
3、抗干擾能力強(qiáng)
4、具有續(xù)流保護(hù)
5、可單獨(dú)控制一臺(tái)直流電機(jī)
6、PWM脈寬平滑調(diào)速
7、可實(shí)現(xiàn)正反轉(zhuǎn)
【控制說明】
image004.jpg (18.5 KB, 下載次數(shù): 56)
下載附件
2018-2-19 02:14 上傳
【模塊的單片機(jī)測試程序】 - /********************************************************************
- 匯誠科技
- 實(shí)現(xiàn)功能: 直流電機(jī)正轉(zhuǎn)反轉(zhuǎn)啟動(dòng)停止控制程序
- 使用芯片:AT89S52 或者 STC89C52
- 晶振:11.0592MHZ
- 編譯環(huán)境:Keil
- 作者:zhangxinchun匯誠科技
- 【聲明】此程序僅用于學(xué)習(xí)與參考,引用請注明版權(quán)和作者信息!
- *********************************************************************/
- #include<reg52.h>
- #define uchar unsigned char
- #define uint unsigned int
-
- /********************************************************
- 控制位定義
- ********************************************************/
-
- sbit fang_xiang=P1^0; // 方向控制位 (輸入1正轉(zhuǎn),輸入0反轉(zhuǎn))
- sbit sha_che=P1^1; // 啟停控制位
- sbit PWM=P1^2; // 速度控制位 (輸入電平為1時(shí),電機(jī)全速運(yùn)行,當(dāng)輸入PWM信號時(shí)可以調(diào)速運(yùn)行)
-
- sbit zheng_zhuan=P2^0; // 正轉(zhuǎn)按鍵
- sbit fan_zhuan=P2^1; // 反轉(zhuǎn)按鍵
- sbit qi_dong=P2^2; // 啟動(dòng)按鍵
- sbit ting_che=P2^3; // 剎車按鍵
- /********************************************************
- 主函數(shù)
- ********************************************************/
-
- main()
- {
- fang_xiang=1; // 使能控制位
- sha_che=0; // 方向控制位
- PWM=1; // 速度控制位 (輸入電平為1時(shí),電機(jī)全速運(yùn)行,當(dāng)輸入PWM信號時(shí)可以調(diào)速運(yùn)行)
-
- while(1)
- {
- fang_xiang=1; // 使能控制位
- sha_che=0; // 方向控制位
- PWM=1; // 速度控制位 (輸入電平為1時(shí),電機(jī)全速運(yùn)行,當(dāng)輸入PWM信號時(shí)可以調(diào)速運(yùn)行)
- }
- }
- ///////////////////簡單的直流電機(jī)控制程/////////////////
-
- #include<reg52.h>
- #define uchar unsigned char
- #define uint unsigned int
-
- /********************************************************
- 控制位定義
- ********************************************************/
-
- sbit fang_xiang=P1^0; // 方向控制位 (輸入1正轉(zhuǎn),輸入0反轉(zhuǎn))
- sbit sha_che=P1^1; // 啟停控制位
- sbit PWM=P1^2; // 速度控制位 (輸入電平為1時(shí),電機(jī)全速運(yùn)行,當(dāng)輸入PWM信號時(shí)可以調(diào)速運(yùn)行)
-
- sbit zheng_zhuan=P2^0; // 正轉(zhuǎn)按鍵
- sbit fan_zhuan=P2^1; // 反轉(zhuǎn)按鍵
- sbit qi_dong=P2^2; // 啟動(dòng)按鍵
- sbit ting_che=P2^3; // 剎車按鍵
- /********************************************************
- 主函數(shù)
- ********************************************************/
-
- main()
- {
- fang_xiang=1; // 使能控制位
- sha_che=0; // 方向控制位
- PWM=1; // 速度控制位 (輸入電平為1時(shí),電機(jī)全速運(yùn)行,當(dāng)輸入PWM信號時(shí)可以調(diào)速運(yùn)行)
-
- while(1)
- {
- if(zheng_zhuan==0)fang_xiang=1;// 正轉(zhuǎn)
- if(fan_zhuan==0)fang_xiang=0; // 反轉(zhuǎn)
- if(qi_dong==0)sha_che=0; // 啟動(dòng)
- if(ting_che==0)sha_che=1; // 剎車
- }
- }
【圖片展示】
image006.jpg (29.71 KB, 下載次數(shù): 59)
下載附件
2018-2-19 02:14 上傳
image009.png (455.51 KB, 下載次數(shù): 65)
下載附件
2018-2-19 02:14 上傳
image011.png (550.97 KB, 下載次數(shù): 58)
下載附件
2018-2-19 02:14 上傳
全部資料51hei下載地址:
 產(chǎn)品使用手冊.doc
(2.42 MB, 下載次數(shù): 27)
產(chǎn)品使用手冊.doc
(2.42 MB, 下載次數(shù): 27)
2018-2-19 02:15 上傳
點(diǎn)擊文件名下載附件
下載積分: 黑幣 -5
原理圖.doc
(24.5 KB, 下載次數(shù): 28)
2018-2-19 02:15 上傳
點(diǎn)擊文件名下載附件
下載積分: 黑幣 -5
|
|












 QQ好友和群
QQ好友和群 QQ空間
QQ空間 騰訊微博
騰訊微博 騰訊朋友
騰訊朋友 收藏
收藏 淘帖
淘帖 頂
頂 踩
踩
