角度。
校準平衡位置角度操作步驟:
1) 通過按“啟/停”按鍵使能電機停止工作。此時右下顯示OFF狀態;
2) 將擺桿垂直向上置于平衡位置;
3) 通過按“五向按鍵”上下鍵,切換到OLED菜單第2頁,選擇LockAngle選項;
4) 按下“五向按鍵”中間鍵確認。
5) 將擺桿放下,即可進行其他操作。
校準平衡位置角度后,您可以進行下面的操作。 正常操作步驟:
上電后,OLED顯示第1面菜單,為各PID參數值,注意右下的OFF狀態,表示目前電機 驅動模塊TB6612處于禁止工作狀態,需要按下列步驟操作:
2) 上電后電機處于禁止狀態,通過按“啟/停”按鍵(見圖3.3)使能電機驅動使 能。此時右下顯示ON狀態;
3) 通過按“五向按鍵”上下鍵,切換到OLED菜單第2頁,選擇相應功能; 目前的菜單操作功能有兩項:
start:起擺 cycle:(原來標識為roll360):轉圈 此外,起擺直立后,一直有抗擾動功能。
4) 按下“五向按鍵”中間鍵確認。即可執行相應功能。
5) 任何時候想停止電機工作,可按下“啟/停”按鍵 說明:本系統的起擺的思路是讓減速電機正向運動一定時間,形成一定擺角后,再反向 運動一定時間,一個來回便可豎立,進入平衡調節。
void function(void)//倒立擺中擴展功能1(起擺),功能2(擺臂旋轉1圈)實現函數
{…
switch(func)
{
case(1):{
…
setmoto(-op1);delay_ms(t1);
setmoto(op2);delay_ms(t2);
…
}
}
}







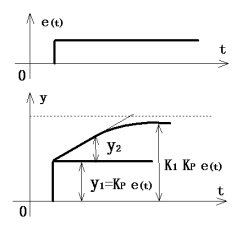
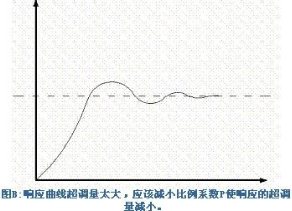
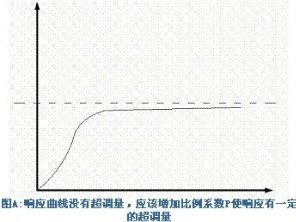
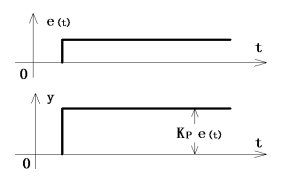 1000,那么輸出到電機兩端的電壓應變為 U0+0.2*(800-1000)。從而達到了調節速度 的目的。顯然比例 P 越大時,電機轉速回歸到輸入值的速度將更快,及調節靈敏度就越 高。從而,加大 P 值,可以減少從非穩態到穩態的時間。但是同時也可能造成電機轉速 在預設值附近振蕩的情形,所以又引入積分 I 解決此問題。
1000,那么輸出到電機兩端的電壓應變為 U0+0.2*(800-1000)。從而達到了調節速度 的目的。顯然比例 P 越大時,電機轉速回歸到輸入值的速度將更快,及調節靈敏度就越 高。從而,加大 P 值,可以減少從非穩態到穩態的時間。但是同時也可能造成電機轉速 在預設值附近振蕩的情形,所以又引入積分 I 解決此問題。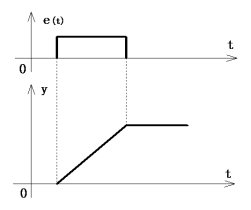
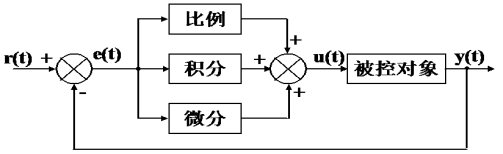
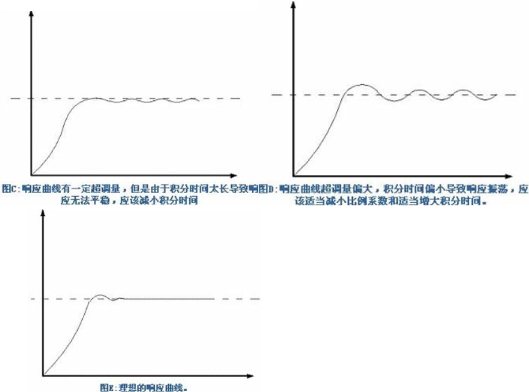
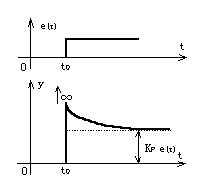 系統偏差信號的變化率 e(t)-e(t-1),具有預見性,能預見偏差變化的趨勢,產生超 前的控制作用,在偏差還沒有形成之前,已被微分調節作用消除,因此可以改善系統的 動態性能。但是微分對噪聲干擾有放大作用,加強微分對系統抗干擾不利。 積分和微 分都不能單獨起作用,必須與比例控制配合。
系統偏差信號的變化率 e(t)-e(t-1),具有預見性,能預見偏差變化的趨勢,產生超 前的控制作用,在偏差還沒有形成之前,已被微分調節作用消除,因此可以改善系統的 動態性能。但是微分對噪聲干擾有放大作用,加強微分對系統抗干擾不利。 積分和微 分都不能單獨起作用,必須與比例控制配合。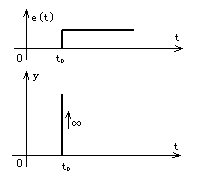
 2. 本系統 PID 控制原理
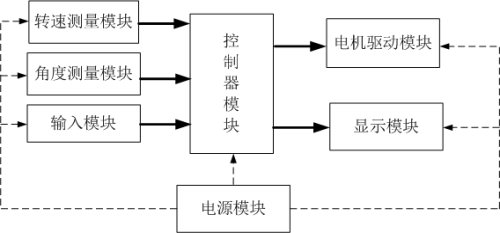
2. 本系統 PID 控制原理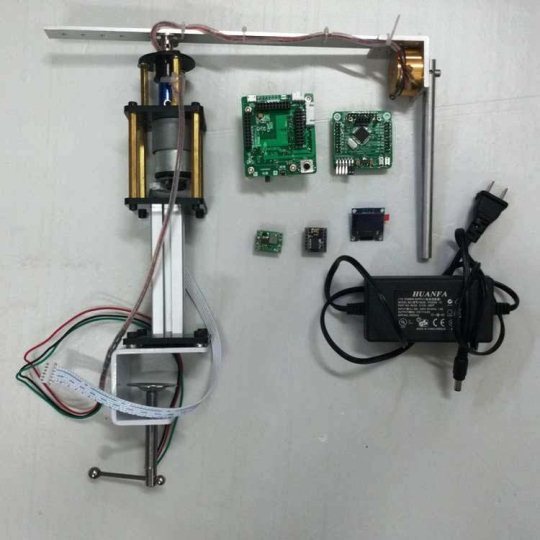 本系統的全套裝置如圖3.1所示:
本系統的全套裝置如圖3.1所示:



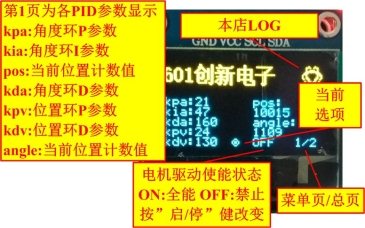 圖 3.4 OLED 第 1 頁菜單內容說明
圖 3.4 OLED 第 1 頁菜單內容說明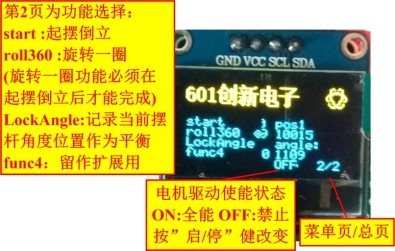

 如圖3.6所示,通過五向按鍵修改PID參數后,長按中間鍵2秒以上,第一行會出現鎖 定圖標
如圖3.6所示,通過五向按鍵修改PID參數后,長按中間鍵2秒以上,第一行會出現鎖 定圖標
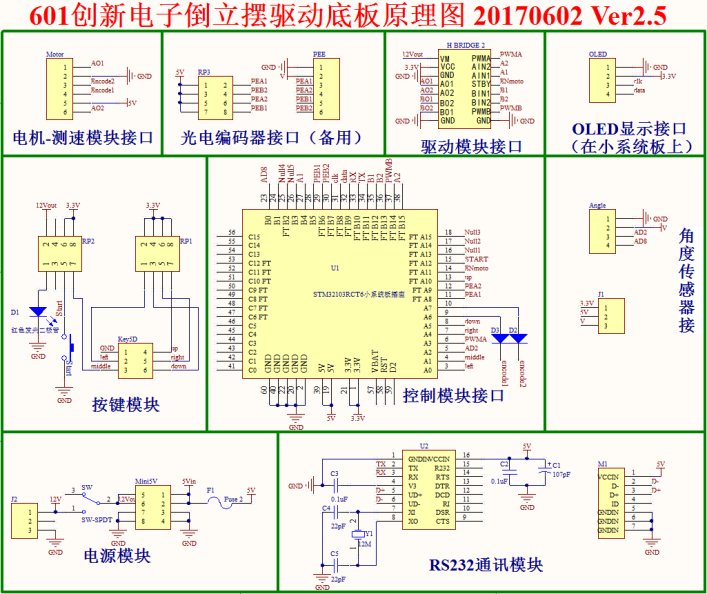
 3-3 所示。PCB 板見圖 3-4.
3-3 所示。PCB 板見圖 3-4.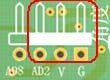 用導電塑料角位移傳感器的一階倒立擺,只需要接右邊三腳,最左邊 的一個腳接了 STM32 的 AD8,在擴展為二階倒立擺時使用
用導電塑料角位移傳感器的一階倒立擺,只需要接右邊三腳,最左邊 的一個腳接了 STM32 的 AD8,在擴展為二階倒立擺時使用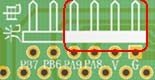 用光電編碼器做角度傳感器的一階倒立擺,只需要接右邊四個 腳,最左邊的兩個腳接了 STM32 的 PB6、PB7,在擴展為二階倒立擺時使用
用光電編碼器做角度傳感器的一階倒立擺,只需要接右邊四個 腳,最左邊的兩個腳接了 STM32 的 PB6、PB7,在擴展為二階倒立擺時使用
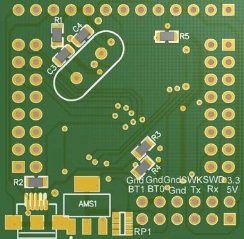
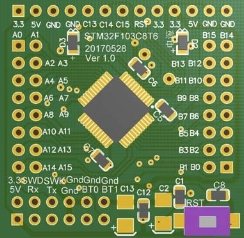


 圖 3.9 WDD35D4 角度傳感器是實物圖與原理圖
圖 3.9 WDD35D4 角度傳感器是實物圖與原理圖
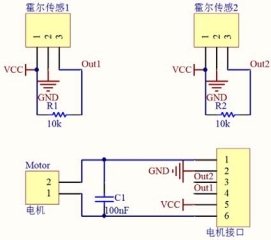 采用了霍爾傳感器來測量磁環轉動時帶來的磁場變化,霍爾傳感器前轉過 1 對磁 極產生一個脈沖。當帶動磁環轉動的減速電機后軸轉動一圈,一個霍爾傳感器上可以產 生 13 個脈沖。而選用的直流減速電機的減速比為 1:30,所以電機前軸轉動一圈,一個 霍爾傳感器上可以產生 13*30=390 個脈沖。圖 3‐9 所示的是增量式輸出的霍爾編碼器 模塊,原理圖如圖 3‐10 所示。
采用了霍爾傳感器來測量磁環轉動時帶來的磁場變化,霍爾傳感器前轉過 1 對磁 極產生一個脈沖。當帶動磁環轉動的減速電機后軸轉動一圈,一個霍爾傳感器上可以產 生 13 個脈沖。而選用的直流減速電機的減速比為 1:30,所以電機前軸轉動一圈,一個 霍爾傳感器上可以產生 13*30=390 個脈沖。圖 3‐9 所示的是增量式輸出的霍爾編碼器 模塊,原理圖如圖 3‐10 所示。
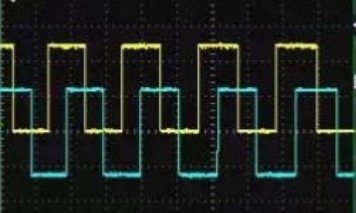
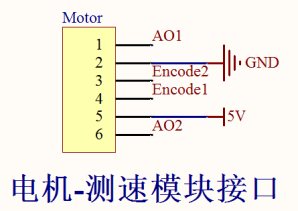

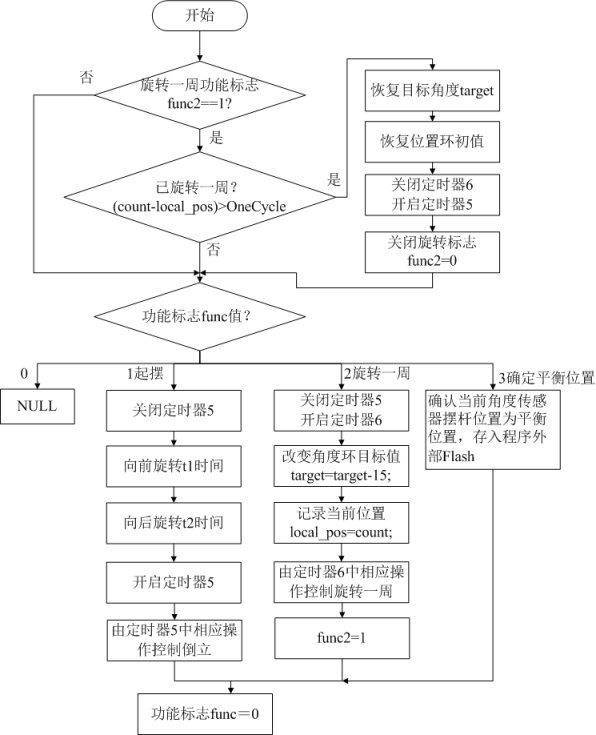
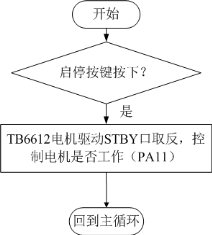
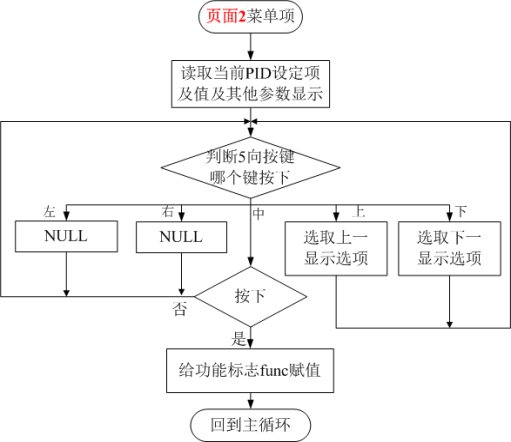
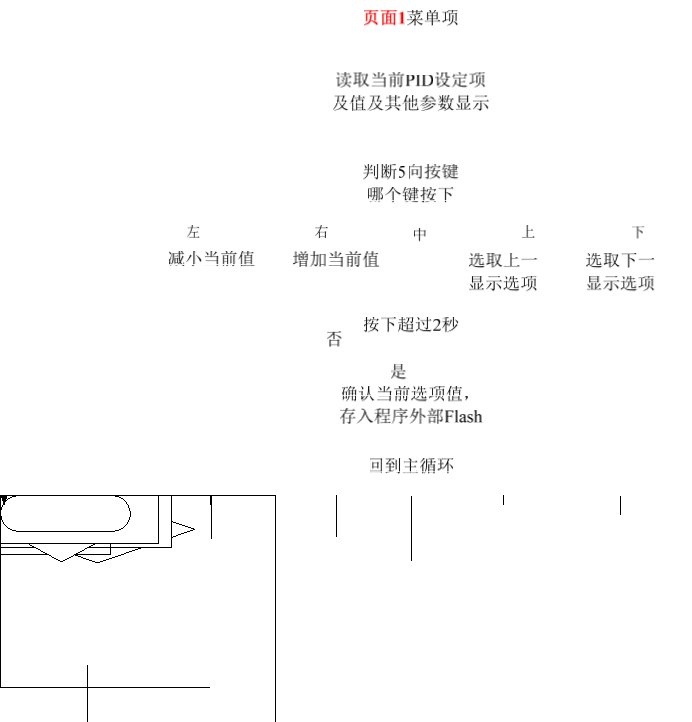 圖 4‐4 OLED 頁面 1 菜單中五向按鍵按下外部中斷流程圖
圖 4‐4 OLED 頁面 1 菜單中五向按鍵按下外部中斷流程圖