��һ�� �wՓ
1.1 �n�}���������x
�S��Ӌ(j��)��C(j��)����ӡ���Ϣ���g(sh��)�Ŀ��ٰl(f��)չ�����ܻ����g(sh��)�İl(f��)չ�ٶ�Խ��Խ�죬���ܻ��c�˂������(li��n)ϵҲԽ��Խ�o�ܣ����ܻ���δ�����(hu��)�l(f��)չ�ı�Ȼڅ�ݡ�����С܇��(sh��)�H�Ͼ���һ��(g��)���������Ƅ�(d��ng)�����ܙC(j��)���ˣ����^�m�����˂��o�������ĵط�������Ҳ��ȡ���˂����һЩ��(f��)�s��Σ�U(xi��n)���|(zh��)�Ĺ���������F(xi��n)���Ԅ�(d��ng)�����I(l��ng)���(n��i)ʮ�ւ����һ�(xi��ng)�l(f��)������С܇���C(j��)�����ѽ�(j��ng)���˂������a(ch��n)����o�ܵ�(li��n)ϵ����һ��
����С܇����һ��(g��)�����܇��h(hu��n)��̽�y���R�e����(y��ng)���Ԅ�(d��ng)���Ƶȹ�����һ�w�ľC��ϵ�y(t��ng)�����C�ϵ��\(y��n)���������������С��b�ء��C(j��)е�Y(ji��)��(g��u)����ӻ��A(ch��)���Ԅ�(d��ng)���Ƶȶ��W(xu��)�Ƶ�֪�R������С܇��һ��(g��)��(f��)�s���������ϵ�y(t��ng)�����(n��i)�����S���K����оƬ��������ƺ��ģ���N���������ɼ��ⲿ�h(hu��n)����Ϣ�������յ�����Ϣ���o����������Ȼ���ɿ����������������(g��)ģ�K��(zh��)������(y��ng)�Ą�(d��ng)��������С܇���ڳɱ��^�ͣ�����߀�܉����һЩ�˂����o�����εĹ��������������뵽���I(y��)���r(n��ng)�I(y��)�Լ����(hu��)����ĸ���(g��)���档���n�}�O(sh��)Ӌ(j��)������С܇���õ����b�ؼ��g(sh��)���@ʾ���g(sh��)����Ƭ�C(j��)����ϵ�y(t��ng)�����м��g(sh��)���Ԅ�(d��ng)���ϼ��g(sh��)�яV����(y��ng)���ڹ��r(n��ng)�I(y��)���a(ch��n)������܊�¡��t(y��)���l(w��i)��������̽�y���T���I(l��ng)���e������܊�ɲ졢���֡����������˻�����Ⱦ��Σ�U(xi��n)�͐��ӭh(hu��n)���������V韵đ�(y��ng)��ǰ�����ɴ˿�Ҋ������������Ҫ���о����x��
1.2 �n�}�о��F(xi��n)��Ͱl(f��)չڅ��
1.2.1 ��F(xi��n)��
����С܇���C(j��)���˵İl(f��)չ�о��������o(j��)60����������Ў�ʮ��Ěvʷ���ԏ������o(j��)60���ĩ�ڣ���һ�_(t��i)�܉������Ƅ�(d��ng)�C(j��)���ˆ����Ժ�(j��ng)�^��ʮ��İl(f��)չ���ܙC(j��)�����ѽ�(j��ng)�������ʾ��ģ�C(j��)���˰l(f��)չ���F(xi��n)�ڵľ��и�֪���ܵ����ܙC(j��)���ˣ��ڼ��g(sh��)��ȡ���˺ܴ���M(j��n)���S�����Ҷ������ܙC(j��)�����M(j��n)���˴������о������ڸ����Ŀ��Ќ�(sh��)����ͬ����ˮƽҲ�иߵͣ������������ձ���ԓ�(xi��ng)���g(sh��)���о�̎���I(l��ng)�ȵ�λ��
������������ܙC(j��)���˾����Ԅ�(d��ng)�J(r��n)֪���ܵ�һ�(xi��ng)�Ƽ�Ӌ(j��)����ʹ���܉��ڏ�(f��)�s�ĭh(hu��n)����ͨ�^������֪�Д����Ԅ�(d��ng)��(zh��)�и��N��(d��ng)���������l(f��)�������ܙC(j��)���ˣ����Ԏ����˂����ż���ʳƷ��������Ʒ��߀���Ԡ������m��������l(w��i)�����ձ�Ŀǰ�ѽ�(j��ng)���Ƴɹ������ΙC(j��)���ˣ������ģ���˂��ĸ��N�沿������ҷdz����档������l(f��)���ĵ����g(sh��)�C(j��)�����ѽ�(j��ng)�V���đ�(y��ng)���ڌ�(sh��)�H�t(y��)�����g(sh��)�ж��ҷ�(w��n)���Ժã���ȫ�Ըߡ��҇�������С܇���C(j��)���˵��о��ѽ�(j��ng)����ʮ����Ěvʷ���e����܊���I(l��ng)��đ�(y��ng)�÷����ѽ�(j��ng)ȡ�����^��ijɹ����ѽ�(j��ng)���^���Ƴ��ˏ�(f��)�s�����ܙC(j��)���ˣ�Σ�U(xi��n)���I(y��)�C(j��)���ˡ����˙C(j��)���ˡ���(f��)�ϽY(ji��)��(g��u)�Ƅ�(d��ng)�C(j��)���˵ȡ�����(n��i)���S���УҲ���ڲ�ͣ���M(j��n)�����@������о�����Ҳ���ˌӳ����F�ijɹ��������п�Ժ���Ƶ��܉���ˌ�Ԓ�ęC(j��)���ˡ��Ϻ��������Ƶľ����^��(qi��ng)Խ�������ķ����P(gu��n)��(ji��)�Y(ji��)��(g��u)�ęC(j��)���˵ȡ��c��ͬ�r(sh��)���҇�Ҳ�_չ�������Ƅ�(d��ng)�C(j��)���˻��A(ch��)��Փ�о�����ijЩ����ȡ���������I(l��ng)�ȵijɹ���������u�sС�c�l(f��)�_(d��)���ҵIJ�ࡣ
1.2.2 �l(f��)չڅ��
�S�������漼�g(sh��)�IJ����M(j��n)���c���ƣ�����(g��)���Ҍ�������С܇���C(j��)���˵Ŀ������������ļӏ�(qi��ng)��δ�������ܙC(j��)���˿��ܕ�(hu��)�������ׂ�(g��)����l(f��)չ��ʹ�øߏ�(qi��ng)�ȵ��p�|(zh��)�����C(j��)���˵ĽY(ji��)��(g��u)Խ��Խ�`�Ʉ�(d��ng)����(zh��)��Ҳ�����`���(y��ng)�þW(w��ng)�j(lu��)�����g(sh��)���h(yu��n)���x�������ƙC(j��)����Ⱥ�w���˂�������ͨ�^��(f��)�s����C(j��)�ϵ�y(t��ng)���˙C(j��)���ϵ�y(t��ng)���о������з�����֪��������(j��ng)�ķ��˙C(j��)���ˡ�����δ���(hu��)�о��и������ܻ��ġ���������(d��ng)��Ȥ�����ܙC(j��)���˳��F(xi��n)���҂����܇������ҕ�(hu��)�O��ĸ�׃�ͷ����˂������a(ch��n)���
1.3 �n�}��(n��i)�ݺ�Ҫ��
���O(sh��)Ӌ(j��)������С܇��̎����������Ƭ�C(j��)����������(g��)ϵ�y(t��ng)�Ŀ��ƺ��IJ��֣���Ҫ������Ƭ�C(j��)����ģ�K���b��ģ�K������ģ�K��ѭ�Eģ�K����(sh��)��(j��)�@ʾģ�K��ģ�K��Ҫ���܉�?q��)��F(xi��n)���N���ܣ�
��1���b�ع��ܣ���ͨ�^�b����������С܇�Ć���(d��ng)��ֹͣ�����D(zhu��n)�����D(zhu��n)�����˵Ȅ�(d��ng)����
��2���Ԅ�(d��ng)���Ϲ��ܣ���С܇��ǰ�������ϵK�r(sh��)����������������(y��ng)���Ԅ�(d��ng)���D(zhu��n)�����D(zhu��n)����ϵK��
��3���Ԅ�(d��ng)ѭ�E���ܣ���С܇�����Ԅ�(d��ng)����Ҏ(gu��)����·����
��4���܉�?q��)��r(sh��)�@ʾС܇�����ٶȡ�·�̵Ȕ�(sh��)��(j��)��
Ҫ��ͨ�^�˴εČ�(sh��)�H��(d��ng)���O(sh��)Ӌ(j��)�������»������ܣ�
��1���W(xu��)��(hu��)��Ӯa(ch��n)Ʒ���O(sh��)Ӌ(j��)�_�l(f��)�^�̣�
��2�����Ն�Ƭ�C(j��)ԭ�����b��ԭ�����@ʾԭ���ȣ�
��3���܉��쾚�M(j��n)��ϵ�y(t��ng)��Ӳ���·�O(sh��)Ӌ(j��)�Լ�ܛ���O(sh��)Ӌ(j��)��
��4���쾚ʹ�����P(gu��n)������O(sh��)Ӌ(j��)�ͷ���ܛ����
��5����醇���(n��i)�����P(gu��n)�īI(xi��n)����������С܇�������о���(d��ng)�B(t��i)��δ���l(f��)չڅ�ݡ�
�ڶ��� ���w�����O(sh��)Ӌ(j��)�cՓ�C
���O(sh��)Ӌ(j��)��������̎������AT89C52��Ƭ�C(j��)����������(g��)ϵ�y(t��ng)���Ƶ����ģ���Ҫ�Ƀɂ�(g��)���֘�(g��u)�ɣ��t���b�ذl(f��)�䲿�ֺ�����С܇���֡���������С܇������Ҫ��������ģ�K��(g��u)�ɣ���Ƭ�C(j��)����ģ�K���Դģ�K��늙C(j��)�(q��)��(d��ng)ģ�K��ѭ�E����ģ�K���D(zhu��n)�ٙz�yģ�K���t��������͔�(sh��)��(j��)�@ʾģ�K�M�ɣ��t���b�ذl(f��)�䲿����Ҫ���b�ذ��I�����aоƬ���t��l(f��)������(g��)���֘�(g��u)�ɡ��係�w�O(sh��)Ӌ(j��)��D�����ɂ�(g��)���֣���D2.1��ʾ��

a �b�ز��ֿ�D b С܇���ֿ�D
�D2.1 ϵ�y(t��ng)���w�O(sh��)Ӌ(j��)��D
2.1 �b�ؿ���ģ�K�O(sh��)Ӌ(j��)�cՓ�C
Ŀǰ���^���õ��b�ؿ��Ʒ�ʽ�ЃɷN���t���b�ؿ���ϵ�y(t��ng)�͟o���b�ؿ���ϵ�y(t��ng)��
����һ���x��t���b���b������С܇���b�ؿ��������t���b����ͨ�^�b�ذl(f��)������(n��i)�ľ��aоƬ�����I��Ϣ�{(di��o)�Ƴ�һ��0��1�Ķ��M(j��n)�ƴ��a��Ȼ��ͨ�^�t�⾀�l(f��)������t������b�ý����M(j��n)�н�a�����\(y��n)�Æ�Ƭ�C(j��)����a��Ĵa��Ϣ�M(j��n)���R�e��Ȼ���ٸ���(j��)��ͬ�Ĵa��Ϣ�M(j��n)�в�ͬ�Ŀ��Ʋ���[9]��
���������x��o����b���b������С܇���b�ؿ��������o����b�������ò�ͬ�l�ʵğo��늲����h(yu��n)���ĸ��N�C(j��)��(g��u)�M(j��n)�п��Ƶ��b���O(sh��)�䡣�@Щ��̖���h(yu��n)���Ľ����O(sh��)����պ����(q��)��(d��ng)�������N����(y��ng)�ęC(j��)е��������O(sh��)��ȥ��ɸ��N����[6]��
�t���b�غ͟o���b���nj���ͬ���d�����f�ģ��t���b�������üt�⾀����Ϳ�����̖�ģ��������c(di��n)���з��������g���ܱ���������҃�(n��i)ʹ�Õr(sh��)�����7m�ķ�����(n��i)��Ч���o���b�������ßo��늲�����Ϳ��Ƶ���̖�ģ��������c(di��n)�ǟo�����ԣ����Բ��挦����ƣ����x�h(yu��n)����Ч���x���_(d��)��(sh��)ʮ��������(sh��)���
���σɷN�����������鱾�O(sh��)Ӌ(j��)���b�ؿ��������mȻ�o���b�ؿ��Ƶľ��x���h(yu��n)Ҳ�����`���������ڱ��O(sh��)Ӌ(j��)���fʹ�üt���b���ѽ�(j��ng)����ˣ����Ҽt���b�ص�ԭ�����Ӻ����������Ա��O(sh��)Ӌ(j��)���÷���һ���t���b������С܇���b�ؿ���ϵ�y(t��ng)��
2.2 늙C(j��)�(q��)��(d��ng)ģ�K�O(sh��)Ӌ(j��)�cՓ�C
Ŀǰ���^���õ�С܇�(q��)��(d��ng)늙C(j��)��Ҫ�ЃɷN�x��
����һ���x��ֱ��늙C(j��)����С܇�Ą�(d��ng)���(q��)��(d��ng)��ֱ��늙C(j��)�nj�ֱ������D(zhu��n)�Q��C(j��)е�ܵ�һ�N�b�ã������D(zhu��n)��(d��ng)���ش��w�e�^С���������p��ʹ�÷��㣬��������һЩС�͵�늄�(d��ng)�b���еđ�(y��ng)���^�ࡣֱ��늙C(j��)���\(y��n)�з�ʽ���@�ӵģ����������ЈA�εĴ��w��(hu��)�a(ch��n)���ň�����(d��ng)�o���D(zhu��n)���ϵ��@�Mͨ늕r(sh��)��ͨ늾�Ȧ�ڴň��б��(hu��)�a(ch��n)���傐Ɲ��������Ȧ���D(zhu��n)���D(zhu��n)��(d��ng)����(d��ng)�D(zhu��n)���D(zhu��n)��(d��ng)�r(sh��)ͨ늾�Ȧ��(n��i)�Ĵň�����?q��)��?hu��)��׃�������@�M�ϵ����ҲҪ׃�Q�����ڷ���һֱ��׃���傐Ɲ��������늙C(j��)����형r(sh��)ᘻ���r(sh��)ᘳ��m(x��)�D(zhu��n)��(d��ng)����H�͘�ʽ�·ֱ���(q��)��(d��ng)ֱ��늙C(j��)����늙C(j��)�������D(zhu��n)��ͨ�^ܛ������ʹ��Ƭ�C(j��)ݔ����ͬռ�ձȵ�PWM���}���{(di��o)����̖��������ֱ��늙C(j��)���D(zhu��n)���M(j��n)������С܇������ٶ�[6]��
���������x���M(j��n)늙C(j��)����С܇�Ą�(d��ng)���(q��)��(d��ng)�����M(j��n)늙C(j��)�nj�ݔ���ݔ�����}�_��̖�D(zhu��n)׃?y��u)��D(zhu��n)�ӵĽ�λ�ƵĿ��Ԍ�(sh��)�F(xi��n)���_��λ��늙C(j��)��늙C(j��)�D(zhu��n)��(d��ng)�Ŀ���ȡ�Q���}�_��̖���l�ʡ��D(zhu��n)��(d��ng)��Ȧ��(sh��)ȡ�Q���}�_�Ă�(g��)��(sh��)���ڲ����d����r�����D(zhu��n)��(d��ng)�ٶȲ���ؓ(f��)�d��Ӱ푣����o���M(j��n)늙C(j��)ݔ��һ��(g��)�}�_��̖��늙C(j��)���D(zhu��n)�ӄt�D(zhu��n)�^һ��(g��)�Ƕȣ��o������B�Ӳ�����}�_���΄t���M(j��n)늙C(j��)���ܳ��m(x��)�D(zhu��n)��(d��ng)��ȥ[5]��
���ֱ��늙C(j��)�����M(j��n)늙C(j��)�D(zhu��n)�^�ĽǶ������}�_��̖���Ƶ�����Ԍ�(sh��)�F(xi��n)С܇�ľ��_��λͣ܇�����M(j��n)늙C(j��)�{(di��o)��Ҳ�������ף�ֻҪݔ�벻ͬ�l�ʵ��}�_��̖���ܿ���С܇������ٶȣ�������߀�кܺõ�ֹ��(d��ng)�����������ڱ��O(sh��)Ӌ(j��)���҂��x���˲��M(j��n)늙C(j��)����С܇���(q��)��(d��ng)늙C(j��)��
2.3 ����ѭ�Eģ�K�O(sh��)Ӌ(j��)�cՓ�C
Ŀǰ��Ҫ�ЃɷN�����팍(sh��)�F(xi��n)С܇���Ԅ�(d��ng)���Ϲ��ܣ�
����һ�����üt�ⷴ��ʽ��늂�������늉����^����һЩ��蘋(g��u)�ɵ��ϵK��z�y�·��z�yС܇ǰ�����ϵK���ϵK��z�y�·���b��С܇ǰ�������g�����҃�߅����z�yС܇ǰ�����ϵK����ϵK�z�y�^�����£��t��l(f��)����O�ܰl(f��)���t��⣬�������С܇ǰ����ϵK��t�⾀�͕�(hu��)�����w����������������O�����մ˕r(sh��)�������O�܌�(d��o)ͨ������ݔ����ݔ�����ƽ��̖����Ƭ�C(j��)��Ȼ���Ƭ�C(j��)�{(di��o)�Ì��E�����ӳ������С܇��������(y��ng)�ı��Ϸ���(y��ng)����(d��ng)��߅�����ϵK��r(sh��)��Ƭ�C(j��)��(hu��)�Ԅ�(d��ng)�{(di��o)�����D(zhu��n)�ӳ�����������D(zhu��n)����(d��ng)��߅�����ϵK��r(sh��)��Ƭ�C(j��)��(hu��)�Ԅ�(d��ng)�{(di��o)�����D(zhu��n)�ӳ�����������D(zhu��n)����(d��ng)�o�ϵK��r(sh��)���l(f��)���ļt�⾀�������䣬�������O�ܽ�ֹ��ݔ�����ƽ��̖��С܇?y��n)^�m(x��)��ǰ���[8]��
�����������ó���ԭ���z�yС܇ǰ�����ϵK����z�y�ϵK��ԭ�����£����ɳ����l(f��)������С܇ǰ���l(f��)�䳬������������ǰ�����^���У��������ϵK��t��(hu��)�������ȥ�����䲨�����������b�ý��պ��(hu��)�a(ch��n)��һ��(g��)���̖Ȼ���D(zhu��n)����ߵ��ƽ��̖�����o��Ƭ�C(j��)��������ƽ�t�f��ǰ�������ϵK��Ȼ���Ɇ�Ƭ�C(j��)�{(di��o)�ñ����ӳ́�����С܇��������(y��ng)�Ķ���ϵK�Ą�(d��ng)��[7]��
�ڱ��O(sh��)Ӌ(j��)�҂������˵�һ�N������(sh��)�F(xi��n)С܇���Ԅ�(d��ng)���Ϲ��ܡ�
2.4 ��(sh��)��(j��)�@ʾģ�K�O(sh��)Ӌ(j��)�cՓ�C
����(j��)�}Ŀ��Ҫ��С܇���Ԍ�(sh��)�r(sh��)�@ʾ���\(y��n)��(d��ng)���ٶȡ����x�Ȕ�(sh��)��(j��)����Ҫ�ЃɷN�����팍(sh��)�F(xi��n)��
����һ���ù�ꖘO��(sh��)�a�ܺͿɾ��̵��I�P�ӿ�оƬ�M�ɔ�(sh��)��(j��)�@ʾ�·���ӿ�оƬֱ���c��Ƭ�C(j��)��I/O�����B���Ɇ�Ƭ�C(j��)���_���ƌ�(sh��)�F(xi��n)LED��(d��ng)�B(t��i)�@ʾ��
����������LCDҺ���@ʾ��ֱ���c��Ƭ�C(j��)���B�M�ɔ�(sh��)��(j��)�@ʾ�·��LCDҺ���@ʾ����һ�N���T�Á��@ʾ�ַ��͔�(sh��)�ֵ��c(di��n)���Һ��ģ�K�����������ɂ�(g��)5X7��5X11�c(di��n)��ַ�λ�M�ɵģ�һ��(g��)�ַ�ռ��(j��)һ��(g��)�c(di��n)��ַ�λ��ÿλ֮�g��һ��(g��)�c(di��n)����g���ַ����_�����c��֮�gҲ���g��[8]��
���ڱ��O(sh��)Ӌ(j��)��Ҫ�@ʾ�Ĕ�(sh��)��(j��)�^�࣬����LED��(sh��)�a�܁��@ʾ�����(g��)��(sh��)�a�ܲ��ܝM��Ҫ���@���·�O(sh��)Ӌ(j��)�^�ڏ�(f��)�s���෴ֻ��һ��(g��)LCDҺ���@ʾ�������@ʾҪ��(sh��)��(j��)�����Ա��O(sh��)Ӌ(j��)�҂����÷�������LCD�@ʾ�����@ʾ��(sh��)�r(sh��)��(sh��)��(j��)��
2.5 �D(zhu��n)�ٜy��ģ�K�O(sh��)Ӌ(j��)�cՓ�C
����һ���x������_�P(gu��n)�͂������y��С܇܇݆�D(zhu��n)�١����w�����ǣ��ڷǴ��Բ����������D(zhu��n)����,�̶���һƬ��Դ��w,�������_�P(gu��n)�͂������ĸ�֪������ʹ��w�ĴŘO����, ���ڰ��b���ϰ��b��(ע��ň�����ҪŪ�e(cu��)),݆���D(zhu��n)��(d��ng)�r(sh��)���w��(hu��)�����D(zhu��n)��(d��ng),�ڴ��w�D(zhu��n)���͂������Ľ����������r(sh��), ������������ݔ��һ��(g��)�}�_��̖, �Ƀɂ�(g��)�}�_�g�ĕr(sh��)�g�g��,�������D(zhu��n)��,Ȼ���ٸ���(j��)܇݆�돽���̱�����С��܇�\(y��n)�е��ٶ�[10]��
���������x��ֱ��ʽ��늙z�y���y��С܇܇݆�D(zhu��n)�١����w������: ��С܇���(q��)��(d��ng)݆�����S�ϰ��bһ��(g��)�_��ʮ��(g��)��۵ĈA���~Ƭ,�����~Ƭ���(q��)��(d��ng)݆�܉�ͬ���D(zhu��n)��(d��ng)��Ȼ�����(q��)��(d��ng)݆���b��ֱ��ʽ��늙z�y�����~Ƭ�S��܇݆���D(zhu��n)��(d��ng)�����и�t��l(f��)����c�t����ܹ�֮�g�ļt�⾀ͨ·����(d��ng)�~Ƭ�D(zhu��n)��(d��ng)������c�t�⾀ͨ·�غϕr(sh��),�z�y����(d��o)ͨ���t����ܹ�ͨ�^���,��(d��ng)�~Ƭ�D(zhu��n)��(d��ng)��ʹ�����ס�r(sh��)����ͨ·���_���S��܇݆������D(zhu��n)��(d��ng),���(hu��)ݔ���B�m(x��)���}�_���У��y���}�_�Ă�(g��)��(sh��)���֪�~Ƭ�D(zhu��n)�^�Ŀה�(sh��),�Ķ���Ӌ(j��)���܇݆�D(zhu��n)��(d��ng)���D(zhu��n)�Ǻ��D(zhu��n)�٣�Ȼ���ٸ���(j��)܇݆�돽��ܛ�����̱�����С܇�\(y��n)�е��ٶ�[11]��
���σɷN�������܉�y��С܇܇݆���D(zhu��n)�١������ڱ��O(sh��)Ӌ(j��)�У����ڷ���һ���f��Ҫ���ں�С��С܇܇݆���ܼ����b��Ƭ���^���y�����ұ˴�֮�gҲ���a(ch��n)���ɔ_����˱��O(sh��)Ӌ(j��)�M���÷������y��С܇���D(zhu��n)�١�
2.6 �Դģ�K�O(sh��)Ӌ(j��)�cՓ�C
�Դ������(g��)С܇ϵ�y(t��ng)�\(y��n)�еĻ����l�����������ܵĺÉ�ֱ�ӛQ������(g��)ϵ�y(t��ng)�\(y��n)�еķ�(w��n)���Ժ����ܡ�С܇�Ĺ���Դ�����ɲ���,��Ƭ�C(j��)����ģ�K�Դ��늙C(j��)�(q��)��(d��ng)ģ�K�Դ���҂�����Ƭ�C(j��)��������·�Ͳ��M(j��n)늙C(j��)���_��늣������Ӱ푣���(sh��)�F(xi��n)��(w��n)����늡����ڲ��M(j��n)늙C(j��)���^�ߵĹ��늉�����Ƭ�C(j��)����߉��Ԫ����늉����ܳ��^5V��������O(sh��)Ӌ(j��)��(w��n)���·��
����һ������8��(ji��)1.5V��늳ش�(li��n)��12Vֱ�ӽo���M(j��n)늙C(j��)��늣�Ȼ��(j��ng)�^��LM7805��(w��n)��оƬ��(g��u)�ɵķ�(w��n)���·��늉�����5V��o�Ƭ�C(j��)�������߉�·��늡����DZ���������늳�������ޣ����Ҕ�(sh��)���^��ĸ�늳������^���(hu��)�o�(q��)��(d��ng)늙C(j��)����̫��ؓ(f��)��(d��n)��Ҳռ����̫��Ŀ��g���w�e�^С��С܇��ʹ��̫�����㣬���Էŗ���ԓ������
������������12V��늳�ֱ�ӽo���M(j��n)늙C(j��)��늣���늉�����5V��o��Ƭ�C(j��)��������·��늡���늳ؾ����^�L���m(x��)�������Լ�늉�ݔ����ֵ��������ô׃����������?y��n)���늳ص��w�e���|(zh��)���^�����m�ϱ��O(sh��)Ӌ(j��)��ʹ�ã������҂����]��ʹ����늳���늡�
������������3��(ji��)4.2V�늳ش�(li��n)�ķ�ʽ��ֱ�ӽo���M(j��n)늙C(j��)��늣�Ȼ��(j��ng)�^�ɷ�(w��n)��оƬ��(g��u)�ɵķ�(w��n)���·��늉�����5V��o��Ƭ�C(j��)�������߉�·��늡��������늳ص�����^�㲢�ҿ��Գ���؏�(f��)���ã�3��(ji��)�늳�������ռ�õĿ��g���^С�����ԓ�������^���У���K�҂��x����ԓ��������С܇���(q��)��(d��ng)�Դ[14]��
������ ��ģ�KӲ���·�O(sh��)Ӌ(j��)
���O(sh��)Ӌ(j��)���b������С܇��Ӳ�����ֹ��֞�ɴ�ģ�K���t���b�ذl(f��)����Ӳ��ģ�K������С܇����Ӳ��ģ�K�����мt���b�ذl(f��)��Ӳ��ģ�K�����b�ذ��I�����aоƬ���t��l(f��)������(g��)��ģ�K������С܇����Ӳ��ģ�K������Ƭ�C(j��)����ģ�K��늙C(j��)�(q��)��(d��ng)ģ�K������ѭ�Eģ�K���@ʾģ�K���t�������ģ�K���Դģ�K6��(g��)��ģ�K��
���Ƚ�B�t���b�ذl(f��)�������ּ��b�ذ��I�����aоƬ���t��l(f��)������(g��)��ģ�K��Ӳ���O(sh��)Ӌ(j��)��
3.1 �t���b�ذl(f��)����ģ�K
3.1.1 �t���b��ģ�K�Ĺ���ԭ��
�t�⾀�b���DZ��^��Ҋ��һ�N�b���O(sh��)�䣬�������ò��L��0.76~1.5��m֮�g�ļt�⾀����Ϳ�����̖���b���O(sh��)�䡣��ռ��(j��)���gС���r(ji��)����ˡ�ʹ�÷��㣬���҂����õļ�����������ҕ��DVD������C(j��)���յ�Ⱥ�һЩС��늄�(d��ng)����b���Ͼ��ё�(y��ng)���˼t�⾀�b���O(sh��)�䡣���Ǽt���b��Ҳ��ȱ�c(di��n)���������ܵ����g�;��x�����ƣ�һ����7m�ķ�����(n��i)��Ч�Ұl(f��)��ͽ���֮�g���ܱ����w�����������ڱ��O(sh��)Ӌ(j��)������С܇���f�ѽ�(j��ng)�܉�M��Ҫ��
�t���b��ϵ�y(t��ng)һ���ɃɴֽM�ɣ�һ��(g��)�t��l(f��)�䲿�֣�һ��(g��)�t����ղ��֡����аl(f��)�䲿����Ҫ�ɰ��I�I�P�����a�{(di��o)�ơ�LED�t��l(f��)������(g��u)�ɣ�������Ҫ�IJ��־��Ǒ�(y��ng)�þ��aоƬ�����I��Ϣ�M(j��n)�о��a�Ͱl(f��)�ͣ����ղ����ɹ���D(zhu��n)�Q�Ŵ��������{(di��o)����a�·��(g��u)�ɣ�������Ҫ�IJ����nj����յ��ľ��a�M(j��n)�н��{(di��o)����ԭ����D3.1��ʾ��

�D3.1 �t���b��ϵ�y(t��ng)ԭ����D
�����b������һ��(g��)���I���b�����ľ��aоƬ��(hu��)�����I��Ϣ�M(j��n)�о��a��Ȼ��ͨ�^LED�t��l(f��)�����l(f��)���}�_���a�����t������^���պ��a�����ݔ�뵽��Ƭ�C(j��)���ⲿ�Д࣬�����յ����}�_���a�M(j��n)��λ��0����λ��1�����R�e���ٸ���(j��)��ͬ�Ĵa��Ϣ�{(di��o)������(y��ng)���ӳ���팦С܇�M(j��n)�в�ͬ�Ŀ��Ʋ�����
3.1.2 HT6221���aоƬ����
HT6221�Ǻ�̩��˾���a(ch��n)�Ķ���b�ؾ��aоƬ������늉���1. 8V-3.5V�������PPM��Pulse Position Modulation���M(j��n)�о��a�������ܾ��a16λ��ַ�a��8λ��(sh��)��(j��)�a�������ͬ�r(sh��)֧��32��(g��)���(d��ng)�I�������_�Y(ji��)��(g��u)��D3.2��ʾ��
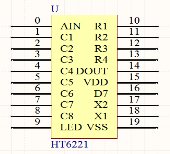
�D3.2 HT6221���_�D
������_�f�����±�3-1��ʾ��
��3-1HT6221оƬ���_�f��
| | |
| | |
| | |
| | |
| | |
| | ���Д�(sh��)��(j��)ݔ�����_, 38KHz�l(f��)���l�� |
| | |
| | ����Ҫ��(sh��)��(j��)λ(DT)���a�O(sh��)�� |
| | 455KHz��ʎ��ݔ����455KHz��ʎ��ݔ�� |
| | |
�b�ؾ��a�ЃɷN��λ0��λ1������ƽ�}����ͬ�����ƽ�}����һ�ӡ������}���{(di��o)�ƵĴ��дa�����}����0.565ms���g��0.56ms�����ڞ�1.125ms���}�_��ʾ���M(j��n)�Ƶġ�0�������}����0.565ms���g��1.685ms�����ڞ�2.25ms���}�_��ʾ���M(j��n)�Ƶġ�1�����䲨����D3.3��ʾ��
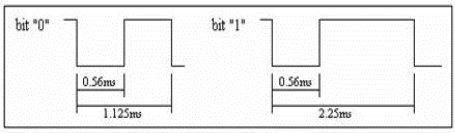
�D3.3 �b�شa�ġ�0���͡�1����ע�����ն˵IJ����c�l(f��)����෴��
3.1.3 �t���b�ذl(f��)����
�b�ذl(f��)��������оƬ�ܶ࣬�ڱ��O(sh��)Ӌ(j��)���҂��\(y��n)����HT6221оƬ�팍(sh��)�F(xi��n)�t�⾎�a�İl(f��)�䡣���·��D3.4��ʾ�� 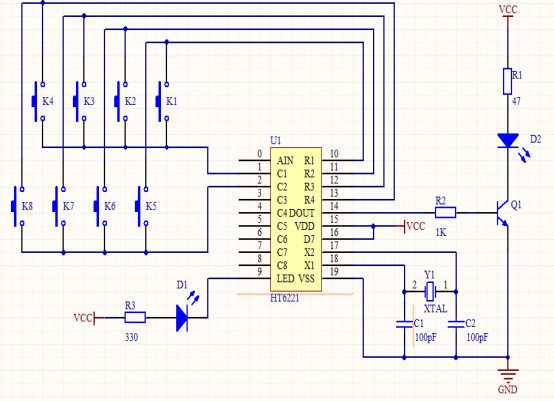
�D3.4 �b�ذl(f��)�����·ԭ��D
�D3.4�Ю�(d��ng)������һ��(g��)���I���º��Iָʾ����D1���l(f��)�⣬HT6221���aоƬ�܉�a(ch��n)���}�_���a��ԓ�}�_���a��(hu��)���{(di��o)�Ƴ�38KHz���}�_��̖Ȼ��ͨ�^�D�еļt��l(f��)����O�ܣ�D2���l(f��)���ȥ[8]��
�����İ��I��ͬ��l(f��)���ľ��a�}�_Ҳ��ͬ�����I�������Ĺ���Ҳ�Ͳ�ͬ��������I�Ĺ��ܷ������±�3-2��ʾ��
��3-2 ���I���ܷ����
����������С܇���ּ���Ƭ�C(j��)����ģ�K���t�������ģ�K��늙C(j��)�(q��)��(d��ng)ģ�K������ѭ�Eģ�K���@ʾģ�K���Դģ�K6��(g��)��ģ�K��Ӳ���O(sh��)Ӌ(j��)��B��
3.2 ��Ƭ�C(j��)����ģ�K
3.2.1 ��Ƭ�C(j��)ģ�K�·
���O(sh��)Ӌ(j��)�҂�����AT89C52��Ƭ�C(j��)��������С܇���ֵĿ��ƺ��ģ�AT89C52��Ƭ�C(j��)��AT89ϵ�еĘ�(bi��o)��(zh��n)��8λ��Ƭ�C(j��)�����c��(bi��o)��(zh��n)MCS-51ָ��ϵ�y(t��ng)��8052�a(ch��n)Ʒ���_���ݣ����ĵ͡�����(qi��ng)�r(ji��)������m�����S���^���(f��)�s���ƵĈ��ϡ�AT89C52��Ƭ�C(j��)�ă�(n��i)���Y(ji��)��(g��u)���£�һ��(g��)��ALU�����ĵ�8λ����̎������256�ֹ�(ji��)��(n��i)����(sh��)��(j��)�惦(ch��)����RAM����8K�ֹ�(ji��)�Á��惦(ch��)�����Flash��(n��i)������惦(ch��)����Ƭ��(n��i)ROM(�ɷ���(f��)����1000��),4��(g��)8λ�ɾ���I/O�ڣ�P0��P1��P2��P3����3��(g��)16λ���r(sh��)/Ӌ(j��)��(sh��)����8��(g��)�Д�Դ���ɂ�(g��)�Д���(y��u)�ȼ����Д����ϵ�y(t��ng)��һ��(g��)ȫ�p������ͨ�ſڣ�һ��(g��)Ƭ��(n��i)��ʎ���͕r(sh��)��·[1]��AT89C52��Ƭ�C(j��)��С��(y��ng)��ϵ�y(t��ng)��Ҫ�Ɇ�Ƭ�C(j��)����(f��)λ�·����ʎ�·�Ȳ��ֽM�ɡ����O(sh��)Ӌ(j��)�Ć�Ƭ�C(j��)����ģ�Kԭ��D��D3.5��ʾ��
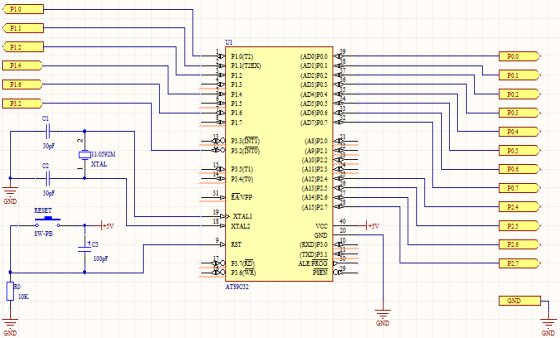
�D3.5 ��Ƭ�C(j��)����ģ�K
���O(sh��)Ӌ(j��)���҂�ʹ����AT89C52��Ƭ�C(j��)�Ĵ����_������w�����_���ܷ������±�3-3��ʾ��
��3-3 ��Ƭ�C(j��)�����ܷ����
| |
| ��LCD1602��D0-D7���_�����锵(sh��)��(j��)��Ϣ��ݔ�����_ |
| ��LCD1602��RS��RW��E���_�����锵(sh��)��(j��)��Ϣ�Ŀ��ƶ� |
| |
| �B���D(zhu��n)�ٜy���·���}�_ݔ���� |
| �B��늙C(j��)�(q��)��(d��ng)оƬ���}�_��̖ݔ��� |
| |
| |
| |
3.2.2 ��(f��)�
��Ƭ�C(j��)�ď�(f��)λ���Ǟ��˳�ʼ����Ƭ�C(j��)�Ĺ�����B(t��i)���Еr(sh��)��(d��ng)�����\(y��n)�г��e(cu��)��������e(cu��)�`��ʹϵ�y(t��ng)̎���i����B(t��i)�����˔[Ó������Ҳ�ɰ���(f��)λ�I���³�ʼ����Ƭ�C(j��)��RST���_�Ǐ�(f��)λ��̖��ݔ��ˣ�Ҫ��(sh��)�F(xi��n)��(f��)λ�������ʹRST���_�����ٱ��փɂ�(g��)�C(j��)�����ڵĸ��ƽ���ُĸ��ƽ׃?y��u)���ƽ��ɏ?f��)λ����(f��)λ�·�ɰ��I��(f��)λ����늏�(f��)λ�ɷN��ʽ�����O(sh��)Ӌ(j��)���ð��I��(f��)λ��(sh��)�F(xi��n)��(f��)λ��������Ƭ�C(j��)���I��(f��)λ�·��D3.6��ʾ��
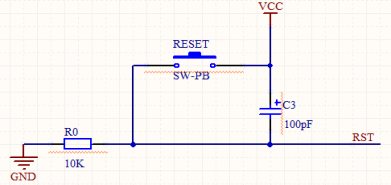
�D3.6 ��(f��)�
���I��(f��)λ��ͨ�^���Iʹ��(f��)λ���_��(j��ng)���R0�cVCC�Դ��ͨ�팍(sh��)�F(xi��n)�ģ�����(f��)λ�I�r(sh��)��RST���_����ƽ�����_��(f��)λ���I��RST���_��u������ƽ����(f��)λ�Y(ji��)����
3.2.3 ��ʎ�·
AT89C52��Ƭ�C(j��)��(n��i)��һ��(g��)�����淴��Ŵ�������ݔ��˞�оƬ���_XTAL1��ݔ���˞�оƬ���_XTAL2��ֻҪ��Ƭ��ͨ�^XTAL1��XTAL2���_�����ʎԪ�����羧�w��ʎ�������t�ɘ�(g��u)��һ��(g��)��(w��n)�����Լ���ʎ������Ƭ�C(j��)ͨ늺ɹ��������ⲿ��ʎ�·��D3.7��ʾ��
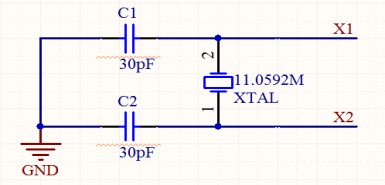
�D3.7����ʎ�·
AT89C52��Ƭ�C(j��)��(n��i)��RAM������С����(d��ng)��Ƭ�C(j��)��Ҫ��Ŵ�����(sh��)��(j��)�r(sh��)�ͱ�횔U(ku��)չ�ⲿ��(sh��)��(j��)�惦(ch��)��������AT89C52��Ƭ�C(j��)��I/O�ڔ�(sh��)�����ܺ����ޣ�Ҳ����Ҫ�U(ku��)չ�ⲿ�ӿ�оƬ�����ڱ��O(sh��)Ӌ(j��)����Ҫ̫���I/O�ڣ���(n��i)������惦(ch��)��Ҳ���ã����Բ��ÔU(ku��)չ�ⲿ��(sh��)��(j��)�惦(ch��)�����ⲿ�ӿ�оƬ��
3.3 �t�����������a
�t�������Ҳ����һ�w���t������^�����(n��i)�����ɼt��O(ji��n)�y���O�ܣ��Ŵ�������������ͨ�V�������e���·�����^���Ș�(g��u)�ɵġ��t��O(ji��n)�y���O�ܽ��յ��t����̖��(hu��)����̖�͵��Ŵ������������������}�_���ȿ�����һ����ˮƽ��������̖�M(j��n)�뎧ͨ�V��������ͨ�V����ֻ���S30khz��60khz��ؓ(f��)�d��ͨ�^��Ȼ���}�_��̖��ͨ�^���{(di��o)�·�ͷe���·�M(j��n)����^�����ɱ��^��ݔ���ߵ��ƽ��̖��߀ԭ���l(f��)��˵���̖���Ρ���������߽��յ��`����ݔ���ĸߵ��ƽ�Ͱl(f��)����Ƿ���ġ��t������^�кܶ�ķN�һ�㶼���Դ���_����̖ݔ�����_�ͽӵ����_������(j��)�l(f��)����{(di��o)���d���IJ�ͬ��(y��ng)�x������(y��ng)���{(di��o)�l�ʵĽ����^�����O(sh��)Ӌ(j��)�҂�����һ�w���t������^1838�����{(di��o)HT6221���aоƬ�ľ��a���䌍(sh��)��D��D3.8��ʾ��

�D3.8 1838�t������^
���ڼt������^��(n��i)���Ŵ���Ҳ�ܴ�����棬�@�Ӻܕ�(hu��)��������ɔ_������ڽ����^���Դ���_��횼��ϴ�С��22uf���ϵĞV����ݡ����O(sh��)Ӌ(j��)�ļt������·��D3.9��ʾ��
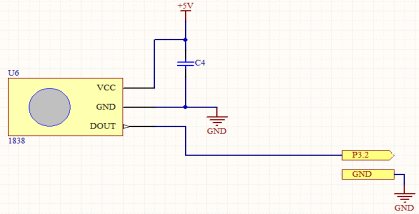
�D3.9 �t������·�D
����U6��1838�t������^�����C4��V����ݣ�DOUT �ǽ��{(di��o)��̖��ݔ���ˣ�ֱ���c��Ƭ�C(j��)��P3.2���_��INT0�Д����B[8]��
��a�����c(di��n)�������R�eλ0��λ1������λ0��λ1�ĵ��ƽ�}����ͬ�����ƽ�}����һ�ӡ�������Ҫ����(j��)���ƽ�Č��ȅ^(q��)�eλ0��λ1�������0.56ms���ƽ��̖�^���ӕr(sh��)��0.56ms�Ժ�������x�����ƽ��̖�f��ԓλ��0��֮�t��1�����˿ɿ���Ҋ�ӕr(sh��)��횽���0.56ms��1.12ms֮�g,��t���ԓλ��0�x����������һλ�ĸ��ƽ������҂�?n��i)������gֵ����1.12ms+0.56ms��/2=0.84ms��
��(d��ng)�����b�����İ��I���мt���}�_���a��̖�l(f��)������(j��ng)�t������^���ս�a������ݔ����ݔ���z�����κ�ķ�����̖��Ȼ��ֱ��ݔ������Ƭ�C(j��)�ⲿ�Д��M(j��n)�дa��Ϣ���R�e����Ƭ�C(j��)���{(di��o)������(y��ng)�ӳ����(zh��)�Ќ���(y��ng)�IJ��������w��a�������̈D��D3.10��ʾ��
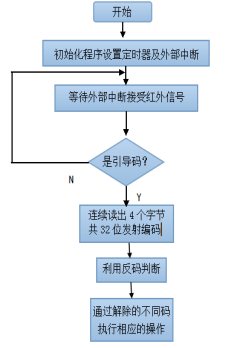
�D3.10 �t����ս�a���̈D
3.4 늙C(j��)�(q��)��(d��ng)ģ�K
3.4.1 ���M(j��n)늙C(j��)�Ĺ���ԭ��
���M(j��n)늙C(j��)��һ�N����}�_��̖�D(zhu��n)׃?y��u)��λ�ƻ�λ�Ƶ�늙C(j��)��늙C(j��)�D(zhu��n)��(d��ng)�Ŀ���ȡ�Q���}�_��̖���l�ʡ��D(zhu��n)��(d��ng)��Ȧ��(sh��)ȡ�Q���}�_�Ă�(g��)��(sh��)���ڲ����d����r�����D(zhu��n)��(d��ng)�ٶȲ���ؓ(f��)�d��Ӱ푣����o���M(j��n)늙C(j��)ݔ��һ��(g��)�}�_��̖��늙C(j��)���D(zhu��n)�Ӿ��D(zhu��n)�^һ��(g��)�̶��Ƕȣ�����ǣ����o��ݔ���B�m(x��)���}�_��̖���M(j��n)늙C(j��)�����B�m(x��)�D(zhu��n)��(d��ng)[5]��
�ڱ��O(sh��)Ӌ(j��)���҂����ò���Ǟ�1.8�ȵ����ಽ�M(j��n)늙C(j��)����С܇���(q��)��(d��ng)늙C(j��)�����(n��i)���Y(ji��)��(g��u)��Ԫ���D��D3.11��ʾ��
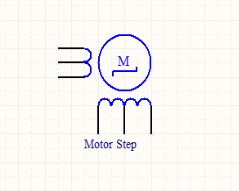
�D3.11 ���M(j��n)늙C(j��)�Y(ji��)��(g��u)��Ԫ���D
���ಽ�M(j��n)늙C(j��)�������^С���w�e���D(zhu��n)�أ�ԓ늙C(j��)����5�����������քe�ǃ�(n��i)���ĽM�@�M��ȦA��B��C��D���ĸ���������һ���Դ������������ÆΘO��ֱ���Դ��늣�ʹA��B��C��D�����@�M݆����늣��D(zhu��n)�Ӿ͕�(hu��)����A��B��C��D�����D(zhu��n)��(d��ng)�������D(zhu��n)�Ƕ��c�}�_��(sh��)�����ȣ����D(zhu��n)�l���c�}�_�l�ʳ����ȡ�
���O(sh��)Ӌ(j��)�IJ��M(j��n)늙C(j��)����������ĵĹ�����ʽ����A-AB-B-BC-C-CD-D-DA-A
��ͨ����������(d��ng)ͨ����?y��n)�A-AB-B-BC-C-CD-D-DA�r(sh��)늙C(j��)���D(zhu��n)����(d��ng)ͨ����?y��n)�DA-D-CD-C-BC-B-AB-A�r(sh��)늙C(j��)���D(zhu��n)�����M(j��n)늙C(j��)�����r(sh��)�ĕr(sh��)���ΈD��D3.12��ʾ��
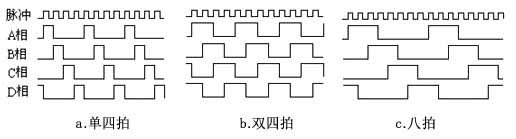
�D3.12 ���M(j��n)늙C(j��)�����r(sh��)���ΈD
3.4.2 ULN2003оƬ����
ULN2003�(q��)��(d��ng)оƬ����ֱ���Á��(q��)��(d��ng)���С��0.5A�IJ��M(j��n)늙C(j��)��ULN2003оƬ������TI��˾��Sprague��˾�_�l(f��)�ĸ߉�������_(d��)���D���w������·�����^�ߵ�����������늉����^���Ĝضȷ������^��(qi��ng)���(q��)��(d��ng)ؓ(f��)�d���������c(di��n),�m�͑�(y��ng)���ڸ��N���ٴ��ʵ��(q��)��(d��ng)ϵ�y(t��ng)�С����(n��i)���Y(ji��)��(g��u)�����_��D3.13��ʾ��
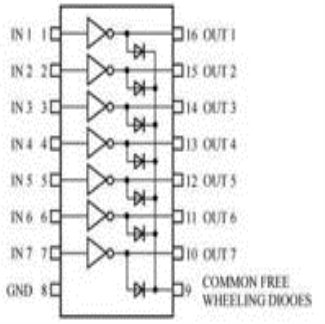
�D3.13 ULN2003оƬ���_�D
�����_�f�����3-4��ʾ��
��3-4ULN2003оƬ���_�f��
| |
| �}�_��̖ݔ��ˣ��ӆ�Ƭ�C(j��)�� |
| |
| �(q��)��(d��ng)��̖ݔ���ˣ��Ӳ��M(j��n)늙C(j��)�� |
| |
ULN2003�(q��)��(d��ng)оƬ��ݔ���Y(ji��)��(g��u)�Ǽ�늘O�_·�ģ�����Ҫ��ݔ���˽�һ��(g��)������裬ͨ����Ƭ�C(j��)�(q��)��(d��ng)ULN2003�r(sh��)������2K������^����m��
3.4.3 ���M(j��n)늙C(j��)�(q��)��(d��ng)�·�O(sh��)Ӌ(j��)
���چ�Ƭ�C(j��)��ݔ�����̫С�������M(j��n)늙C(j��)��Ҫ�^����(q��)��(d��ng)�����������Ҫ�(q��)��(d��ng)�·���B�ӆ�Ƭ�C(j��)�Ͳ��M(j��n)늙C(j��)�����O(sh��)Ӌ(j��)���҂��������ಽ�M(j��n)늙C(j��)����С܇���(q��)��(d��ng)늙C(j��)���ÆΘO��ֱ���Դ��늡�����ULN2003оƬֱ���(q��)��(d��ng)���M(j��n)늙C(j��)�����M(j��n)늙C(j��)�(q��)��(d��ng)�·��D3.14��ʾ��
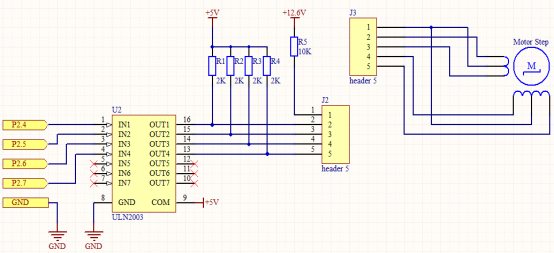
�D3.14 ���M(j��n)늙C(j��)�(q��)��(d��ng)�·
ULN2003��ݔ���ֱ���c��Ƭ�C(j��)��P2.4-P2.7���_���B����Ƭ�C(j��)ݔ����ͬ���}�_��̖���@Щ�}�_��̖��(j��ng)ULN2003�(q��)��(d��ng)оƬ�Ŵ��քe���Ʋ��M(j��n)늙C(j��)�Ć���(d��ng)��ֹͣ�����D(zhu��n)�����D(zhu��n)�����ٺ͜p�١����O(sh��)Ӌ(j��)��ֻҪ�����M(j��n)늙C(j��)�ĸ����@�M�����m�ĕr(sh��)��ͨ늣�����ʹ���M(j��n)늙C(j��)�D(zhu��n)��(d��ng)���������D(zhu��n)����ݔ�벻ͬ�����}�_��̖�������Ԍ�(sh��)�F(xi��n)С܇��ǰ�M(j��n)�ͺ��ˣ��҂�ʹ�Ãɂ�(g��)���M(j��n)늙C(j��)�քe����С܇����݆����݆��ͨ�^��Ƭ�C(j��)ݔ����ͬ�l�ʵ��}�_ʹ���҃ɂ�(g��)܇݆�߂䲻ͬ���D(zhu��n)�٣����D(zhu��n)�ٲ(sh��)�F(xi��n)С܇���D(zhu��n)��(d��ng)���(c��)܇݆�D(zhu��n)�ٴ����҂�(c��)܇݆�r(sh��)С܇���D(zhu��n)����(d��ng)�҂�(c��)܇݆�D(zhu��n)�ٴ������(c��)�r(sh��)С܇���D(zhu��n)��
3.5 ����ѭ�Eģ�K
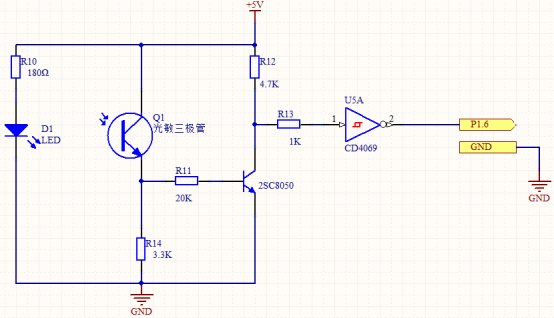
���O(sh��)Ӌ(j��)�҂������˼t�ⷴ��ʽ��늂�������늉����^����һЩ���혋(g��u)���ϵK��z�y�·����ֱ���c��Ƭ�C(j��)��P1.4���_���B����Ɍ��z�y����ģ�M��̖�D(zhu��n)����ߵ��ƽ��̖Ȼ��ݔ�뵽��Ƭ�C(j��)����Ƭ�C(j��)����(j��)ݔ��ĸߵ��ƽ��̖���Д��Ƿ����ϵK����Єt�{(di��o)���Ԅ�(d��ng)�����ӳ������С܇��������(y��ng)�ı��τ�(d��ng)�����ϵK��z�y�·��D3.15��ʾ��
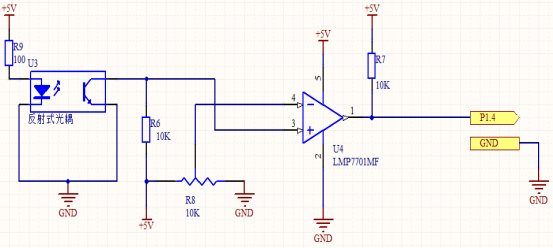
�D3.15 �ϵK��z�y�·
�D��U3�t�ⷴ��ʽ��늂��������ɼt��l(f��)������ܺ������O�ܽM�ɵģ��t��l(f��)��������Á��l(f��)��t�⾀���������O���Á����ձ�������ļt�⾀���t�����/�z�y����һ��(g��)��(n��i)�õ�ֻ���S�t��⾀ͨ�^�Ĺ�V������һ��(g��)ֻ���S38.5 kHz�������̖ͨ�^����ӞV�������@�Ӿͷ�ֹ�������Դ���t��������ĸ��档
U4��늉����^�������܉�?q��)�ݔ���ģ�M늉���̖�D(zhu��n)����ߵ��ƽ��̖����(d��ng)3�_�ƽ����4�_�r(sh��)��ݔ����1�_ݔ������ƽ����֮ݔ������ƽ���ϵK��z�y�·���b��С܇ǰ�������g�����҃�߅����z�yС܇ǰ�����ϵK����ϵK�z�y�^�����£��t����O�ܰl(f��)���t��⣬�������С܇ǰ����ϵK��t�⾀�͕�(hu��)�����w����������������O�����գ��˕r(sh��)�������O�܌�(d��o)ͨ����ݔ����ݔ�����ƽ��̖����Ƭ�C(j��)��Ȼ���Ƭ�C(j��)�{(di��o)�Ì��E�����ӳ�����Ʋ��M(j��n)늙C(j��)��������(y��ng)�ı��Ϸ���(y��ng)����(d��ng)��߅�����ϵK��r(sh��)С܇���D(zhu��n)����(d��ng)��߅�����ϵK��r(sh��)С܇���D(zhu��n)����(d��ng)�o�ϵK��r(sh��)���l(f��)���ļt�⾀�������䣬�������O�ܽ�ֹ��ݔ�����ƽ��̖��С܇?y��n)^�m(x��)��ǰ���[9]��
ѭ�E��ԭ���ͱ��ϵ�ԭ������ͬ�ģ�ѭ�E�·���b��С܇�ײ���ѭ�E��ͨ�^��e�ڰ�ɫ�����ߡ������^�����£��t��l(f��)����O�ܰl(f��)���t��⣬��(d��ng)������ɫ��������t��⣬���^��ݔ������ƽ����(d��ng)���������t��ⱻ����������^��ݔ������ƽ����Ƭ�C(j��)����(j��)ݔ���ƽ��׃���Д�С܇�����·���Ƿ�ƫ�x��Ȼ���{(di��o)���Ԅ�(d��ng)�����ӳ���?q��)��F(xi��n)С܇���Ԅ�(d��ng)ѭ�E����(d��ng)��߅�z�y����ɫ�r(sh��)С܇���D(zhu��n)����(d��ng)��߅�z�y����ɫ�r(sh��)С܇���D(zhu��n)����(d��ng)��߅�z�y���Ķ��Ǻ�ɫ�r(sh��)С܇ǰ�M(j��n)����(d��ng)��߅�z�y���Ķ��ǰ�ɫ�r(sh��)С܇ֹͣ��
3.6 �D(zhu��n)�ٙz�yģ�K
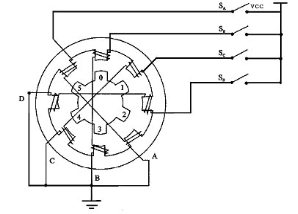
ʩ�����|�l(f��)���Ǿ�������ܵķ��T����(d��ng)����ݔ��˵�늉�������ij��(g��)ֵ�r(sh��),ݔ���˕�(hu��)�����ĸ��ƽ��׃?y��u)����?����(d��ng)ݔ��˵�늉��½���ijһ��(g��)ֵ�r(sh��),ݔ���˕�(hu��)�����ĵ��ƽ��׃?y��u)���ƽ�����O(sh��)Ӌ(j��)����ֱ��ʽ��늙z�y����ʩ�����|�l(f��)�������O�ܺ�������蘋(g��u)�ɵ��·�c��Ƭ�C(j��)��P1.6���_���B��y��С܇܇݆���D(zhu��n)�٣��䌍(sh��)��D���·�D��D3.16��ʾ��

�D3.16 ��ʽ��늜y�ٌ�(sh��)����·�D
���w���D(zhu��n)�ٙz�y������:��С܇���(q��)��(d��ng)݆�����S�ϰ��bһ��(g��)�_��ʮ��(g��)��۵ĈA���~Ƭ,�����~Ƭ���(q��)��(d��ng)݆�܉�ͬ���D(zhu��n)��(d��ng)��Ȼ�����(q��)��(d��ng)݆���b��ֱ��ʽ��늙z�y�����~Ƭ�S��܇݆���D(zhu��n)��(d��ng)�����и�t��l(f��)����c�t����ܹ�֮�g�Ĺ�ͨ·����(d��ng)�~Ƭ�D(zhu��n)��(d��ng)������c��ͨ·�غϕr(sh��),��ͨ·��(d��o)ͨ���������O��ͨ�^���,ݔ���˕�(hu��)ݔ��һ��(g��)���ƽ��̖����(d��ng)�~Ƭ�D(zhu��n)��(d��ng)��ʹ�����ס�r(sh��)����ͨ·���_��ݔ���˕�(hu��)ݔ��һ��(g��)���ƽ��̖���S��܇݆������D(zhu��n)��(d��ng),��ͨ·����Č�(d��o)ͨ�͔��_��ݔ���˱��(hu��)ݔ���B�m(x��)���}�_���У��y���}�_�Ă�(g��)��(sh��)���֪�~Ƭ�D(zhu��n)�^�Ŀה�(sh��),���~Ƭ�D(zhu��n)�^�Ŀה�(sh��)����֪��܇݆�D(zhu��n)�^��Ȧ��(sh��)���Ķ���Ӌ(j��)���܇݆�D(zhu��n)��(d��ng)���D(zhu��n)�٣�Ȼ���ٸ���(j��)܇݆�돽������С܇�\(y��n)�е��ٶȺ�·��[11]��
3.7 ��(sh��)��(j��)�@ʾģ�K
���O(sh��)Ӌ(j��)��С܇�Ĕ�(sh��)��(j��)�@ʾ�·����Һ���@ʾ��LCD1602,LCD1602����8λ����2������3�����ЃɷN�ӿڷ�ʽ��LCD1602Һ���@ʾģ�K�����w�eС�����ĵ͡��@ʾ��(n��i)���S���������p�ɵȃ�(y��u)�c(di��n)�����w��Һ���@ʾ�·��D3.17��ʾ��

�D3.17 LCDҺ���@ʾ�·
�·��LCD1602�cAT89C52��Ƭ�C(j��)ʹ�ò��Д�(sh��)��(j��)ͨ�š����_1���Դ늉����O�����_0��14��15�քe���Դ늉�ؓ(f��)�O,��LCD1602�ṩ�Դ�c�����Դ��2�_��һ��(g��)10K�λ�������{(di��o)��(ji��)�������ȣ�3��4��5�_�քe��P1.0��P1.1��P1.2�_�����Ƭ�C(j��)������̖ݔ���cݔ���ˣ�6��13�_�ӆ�Ƭ�C(j��)��P0.0��P0.7�_�����Ƭ�C(j��)��(sh��)��(j��)��Ϣݔ��ˡ���(sh��)��(j��)�@ʾ��ԭ��飺����ͨ�^��(sh��)��(j��)�@ʾ�ӳ���?q��)�С܇���ٶȡ�·�̵Ȕ?sh��)��(j��)��ϢӋ(j��)�������Ȼ���ٌ��@Щ��(sh��)��(j��)��Ϣͨ�^��Ƭ�C(j��)��P0.0-P0.7���_ֱ��ݔ����LCD1602��DO-D7���_[8]��
3.8 �Դģ�K
�Դ������(g��)С܇ϵ�y(t��ng)�\(y��n)�еĻ����l�����������ܵĺÉ�ֱ�ӛQ������(g��)ϵ�y(t��ng)�\(y��n)�еķ�(w��n)���Ժ����ܡ�С܇�Ĺ���Դ�����ɲ���,��Ƭ�C(j��)����ģ�K�Դ��늙C(j��)�(q��)��(d��ng)ģ�K�Դ���҂�����Ƭ�C(j��)��������·�Ͳ��M(j��n)늙C(j��)���_��늣������Ӱ푣���(sh��)�F(xi��n)��(w��n)����늡�
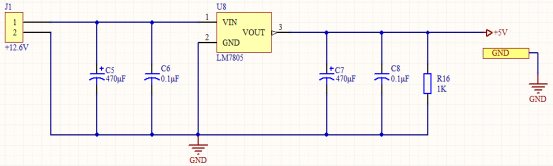
���O(sh��)Ӌ(j��)���҂�����3��(ji��)4.2V�늳ش�(li��n)��12.6Vֱ�ӽo���M(j��n)늙C(j��)��늣������(q��)��(d��ng)С܇늙C(j��)��Ҳ�ɽ���5V��o��Ƭ�C(j��)������߉��Ԫ��늡��@����(ji��)늳ص��w�e�����������^С�����ڰ��b��С܇����������(hu��)���늙C(j��)ؓ(f��)�d�^���҃r(ji��)��͡�����(q��)��(d��ng)������(qi��ng)�����˽o��Ƭ�C(j��)������߉��Ԫ��늣���회��늳ؽM��늉�����5V���@���҂�����LM7805��(w��n)��оƬ�M(j��n)�н�������(w��n)���·��D3.18��ʾ��
�D3.18 5V��(w��n)���·
������ ϵ�y(t��ng)ܛ���O(sh��)Ӌ(j��)
���M(j��n)���C(j��)����ϵ�y(t��ng)�O(sh��)Ӌ(j��)�r(sh��)������ϵ�y(t��ng)Ӳ���O(sh��)Ӌ(j��)�⣬�����Ĺ���������θ���(j��)ÿ��(g��)����Č�(sh��)�H��Ҫ�O(sh��)Ӌ(j��)��(y��ng)�ó���С܇�ܷ�(sh��)�F(xi��n)Ҫ����ȡ�Q��ܛ���ľ����Ƿ���������O(sh��)Ӌ(j��)����ģ�K�������O(sh��)Ӌ(j��)���M(j��n)��ϵ�y(t��ng)ܛ�����O(sh��)Ӌ(j��)����Ҫ������������ѭ�E�ӳ���(sh��)��(j��)�@ʾ�ӳ���ȳ���ģ�K�����ڱ���ˮƽ����������ֻ����˲���ģ�K�ij����O(sh��)Ӌ(j��)��
4.1 ϵ�y(t��ng)���w�������̈D
ϵ�y(t��ng)�Ŀ��w�������̈D��D4.1��ʾ��
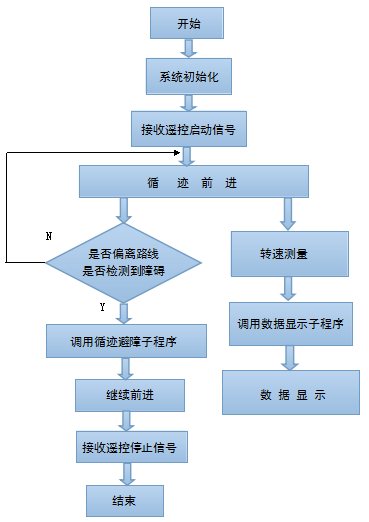
�D4.1 ϵ�y(t��ng)�������̈D
�ڈD4.1ϵ�y(t��ng)�������̈D�У��_ʼ�r(sh��)����ϵ�y(t��ng)�ij�ʼ�����������r(sh��)����ʼ�����ⲿ�Д�ij�ʼ����Һ���@ʾ���ij�ʼ�������б���ѭ�E�ӳ������ڿ���С܇�Ԅ�(d��ng)����ϵK���Ԅ�(d��ng)�����ض��ĺھ�����(sh��)��(j��)�@ʾ�ӳ�����Ҫ�nj��y�õ�܇݆�D(zhu��n)�ٓQ���С܇�������ٶȡ�·�̵Ȕ�(sh��)��(j��)�M(j��n)����LCD1602Һ���@ʾ���@ʾ��
4.2 ����ѭ�Eģ�K�����O(sh��)Ӌ(j��)
4.2.1 ���ϳ������̈D
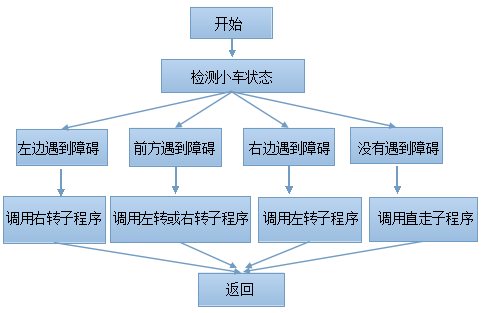
�D4.2 ���ϳ������̈D
�D4.2��ʾ��С܇���ϳ������̈D��С܇������^������λ��С܇ǰ�����Ă�(g��)�ϵK��z�y�·�����z�yС܇�܇��h(hu��n)�����������ϵK��t�����ƽ��̖ݔ������Ƭ�C(j��)��Ȼ���Ɇ�Ƭ�C(j��)�{(di��o)�ñ����ӳ������С܇��������(y��ng)�ı��τ�(d��ng)���������߅�����ϵK�t�{(di��o)�����D(zhu��n)�ӳ�����߅�����ϵK�t�{(di��o)�����D(zhu��n)�ӳ���ǰ�������ϵK�t�{(di��o)�����D(zhu��n)�����D(zhu��n)�ӳ��]�������ϵK�t�{(di��o)��ֱ���ӳ����w�ij���ՈҊ���B�����ӳ���
4.2.2 ѭ�E�������̈D
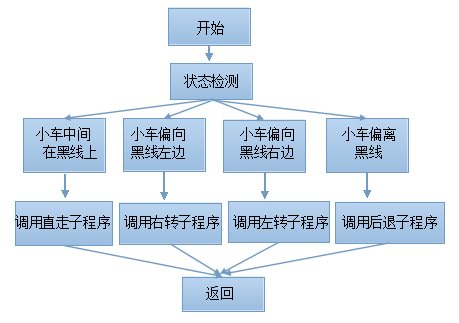
�D4.3 ѭ�E�������̈D
�D4.3��ʾ��ѭ�E�������̈D��С܇��ѭ�E����^���а��b��С܇�ײ����Ă�(g��)�t�ⷴ��ʽ����_�P(gu��n)�����z�yС܇�����·������С܇ƫ�x�ھ��t���z�y���ĵ��ƽ��̖ݔ������Ƭ�C(j��)����Ƭ�C(j��)���{(di��o)��ѭ�E�ӳ������С܇ʹ�������ھ������С܇ƫ��ھ���߅�t�{(di��o)�����D(zhu��n)�ӳ���ƫ��ھ���߅�t�{(di��o)�����D(zhu��n)�ӳ����ںھ��τt�{(di��o)��ֱ���ӳ�����ȫƫ�x�ھ��t�{(di��o)�ú����ӳ����w�ij���ՈҊ���Bѭ�E�ӳ���
4.3��(sh��)��(j��)�@ʾģ�K�����O(sh��)Ӌ(j��)
�D4.4 ��(sh��)��(j��)�@ʾ�������̈D
�ڈD4.4��(sh��)��(j��)�@ʾ�������̈D�У����ȳ�ʼ��LCD1602��Ȼ����Һ���ĵ�һ���@ʾ��·��: cm����Һ���ڶ����@ʾ���ٶ�: cm/s��Ȼ�����������{(di��o)�Ô�(sh��)��(j��)�@ʾ����ˢ��cm����cm/sǰ��Ĕ�(sh��)��(sh��)�F(xi��n)��(sh��)�r(sh��)�@ʾ��Ŀ�ġ����w�ij���ՈҊ���B��(sh��)��(j��)�@ʾ�ӳ���
������ ���Y(ji��)�cչ��
5.1 ���Y(ji��)
���O(sh��)Ӌ(j��)������С܇�����ό�(sh��)�F(xi��n)���}ĿҪ��ĸ��(xi��ng)���ܣ��������b������С܇�Ć�ͣ�����D(zhu��n)�����D(zhu��n)��ǰ�M(j��n)�����ˣ�С܇���Ԅ�(d��ng)�����ھ��������ϵK�r(sh��)�܉��Ԅ�(d��ng)����ϵK�����ҿ��Ԍ�(sh��)�r(sh��)�@ʾ�\(y��n)�е��ٶȡ�·�̵Ȕ�(sh��)��(j��)��ͨ�^�����O(sh��)Ӌ(j��)�ҌW(xu��)��(hu��)����Ӯa(ch��n)Ʒ���O(sh��)Ӌ(j��)�_�l(f��)�^�̣������˼t���b��ԭ�������M(j��n)늙C(j��)���(q��)��(d��ng)ԭ�������üt�ⷴ��ʽ����_�P(gu��n)�z�y�ϵK��ԭ�����@ʾԭ�����Լ���ǰ�����˽����֪�R������Ƭ�C(j��)�ĽY(ji��)��(g��u)�������ϵ�y(t��ng)Ҳ���˸����������J(r��n)�R������Altium Designer��Proteus���·�O(sh��)Ӌ(j��)�ͷ���ܛ���IJ���Ҳ�����쾚���e���ڡ��Լ�����L��ܛ�����̷���Ҳ����һ������ߡ�
�������ڱ���ˮƽ���������ޣ����O(sh��)Ӌ(j��)��߀����һЩ����֮̎���������ڰ��b��С܇����ļt��������z�y�������ޣ�����һЩ�z�yä�^(q��)����늙z�yҲ�����յ����h(hu��n)����̫ꖹ�ĸɔ_���Еr(sh��)���ܕ�(hu��)��(d��o)��С܇��ѭ�E���Ϲ���ʧЧ��С܇�������D(zhu��n)�ٲ���D(zhu��n)���ĵ����@�N�����D(zhu��n)������형�Ҳ���ܳ��m(x��)�D(zhu��n)�����Ҍ�늙C(j��)�ēp��Ҳ�^���@Щ���д��M(j��n)һ���ĸ��M(j��n)�����ơ�
5.2 ���M(j��n)�cչ��
�ڱ��O(sh��)Ӌ(j��)���҂����Բ��ó������ρ�����t������Ԝp�����ɔ_���ల�b�ׂ�(g��)���E�·����С܇��܇�^�ײ����҃�߅��һ��(g��)�����g�ײ����҃�߅��һ��(g��)��܇β�ײ����҃�߅��һ��(g��)���@�ӿ����С܇���E���ܵĿɿ��Ժ��`���ԣ�ͨ�^��M�ٶȣ���ͬ�}�_������(y��ng)���ٶȣ��Č�(sh��)�H�yԇ�����Ҹ����m���D(zhu��n)���ٶȣ�������D(zhu��n)��ľ��_�ȡ�
�҂�߀���Ԟ�С܇�����Z������ģ�K�����Z�������С܇��һЩ��B(t��i)���@�ӌ�����������˙C(j��)�������Ƶ�Ȥζ�ԡ�
���x
��֪���X����(g��)�µĕr(sh��)�g�^ȥ�ˣ����_ʼ���Ѽ��������P(gu��n)�īI(xi��n)�Y�ϴ_��һ��(g��)���w���O(sh��)Ӌ(j��)˼·�����һ�������M(j��n)�и���(g��)ģ�K�ľ��w�O(sh��)Ӌ(j��)�ٵ��F(xi��n)����K�O(sh��)Ӌ(j��)����ɣ��e���x�ҵ�ָ��(d��o)�ώ��ƽ�ώ����O(sh��)Ӌ(j��)�^���нo���ҵĘO��������mȻ�ώ�ƽ�r(sh��)��æ����ÿ���ԕ�(hu��)����ɴΕr(sh��)�g�팦�Ҳ����ĵط��M(j��n)�����ĵ�ָ��(d��o)�������ҵ��O(sh��)Ӌ(j��)�������һЩ���M(j��n)����Ҋ���̕�(hu��)���ҽ�Q���P(gu��n)���}�ľ��w˼·�ͷ������������Ҳ����L��Ӳ���O(sh��)Ӌ(j��)��ܛ���O(sh��)Ӌ(j��)����o�����Ҽ�(x��)�ĵ��v�⡣���O(sh��)Ӌ(j��)�܉��������O(sh��)Ӌ(j��)�΄�(w��)�����˗��ώ���߀�кܶ�ͬ�W(xu��)Ҳ���ҵ��O(sh��)Ӌ(j��)�M(j��n)����һЩָ��(d��o)�͎������ڴˌ��ゃ��ʾ���\���ĸ��x!
���߀Ҫ���x��λ�u��ώ��ڰ�æ֮�г���r(sh��)�g����Փ���M(j��n)���u醣��x�x!


 ����TQQ:125739409;���g(sh��)����QQȺ281945664
����TQQ:125739409;���g(sh��)����QQȺ281945664