|
���I(y��)�O(sh��)Ӌ�f���� GRADUATEDESIGN
�O(sh��)Ӌ�}Ŀ�����چ�Ƭ�C�����ܽ�ͨ������ϵ�y(t��ng)���O(sh��)Ӌ �W�������� ���I(y��)�༉�� �W Ժ��늚�̌WԺ ָ���̎��� ժ Ҫ�S���F(xi��n)���������ͨ�\ݔ?sh��)���څ��ه����ͨ���ɞ����˂������в��ɻ�ȱ��һ���֡����y(t��ng)�Ľ�ͨ������ϵ�y(t��ng)�mȻ��һ���̶��Ͽ��ԝM��ָ�]·�ڽ�ͨ����Ҫ�����S������Ҏ(gu��)ģ�IJ����U��ԭ�еĽ�ͨ������ϵ�y(t��ng)�ѽ�(j��ng)���F(xi��n)�����@��ȱ�c���t�G���r�g�����̶������ܰ��S܇�����ĸ�׃���{(di��o)���t�G�����@ʾ�r�g�� ���O(sh��)Ӌ��AT89S51��Ƭ�C����ģ��������·��(g��u)�ɻ����·��ʹӲ���·���m��(y��ng)����ɵĿ��ƹ��ܡ���Keilܛ���о���C�Z�Գ��������Proteusܛ���M�з��棬�������F(xi��n)�����ܽ�ͨ����ģ�M��ԓϵ�y(t��ng)�ɿ��Ƽt���G���S�����r�g����׃�Q�����е��x�빦�ܡ��ڴ˻��A(ch��)�ϣ�ͨ�^��������܇��������r�M�Д�(sh��)��(j��)�ɼ������ɼ��Ĕ�(sh��)��(j��)���ͽo�������ģ��M�з������^������(j��)���^�ĽY(ji��)���������w��܇�����D(zhu��n)�Q�Ƀ���λ܇������С�ı�ֵ������(j��)��ֵ�D(zhu��n)�Q�Ɍ��t�G���r�g�Ŀ��ƣ�ʹ��ͨ��̖���r�g�ɸ���(j��)܇������׃������˽���ڵ�ͨ��Ч�ʡ�
Ŀ� ժ Ҫ Abstract ��1�� �wՓ 1.1 �n�}���� 1.2 �n�}�о������x 1.3 ���ܽ�ͨ�����о����� 1.4 ����(n��i)���о��F(xi��n)�� 1.5 �҇���ͨ���F(xi��n)�� 1.6 Փ�ĽY(ji��)��(g��u) ��2�� ���ܽ�ͨ������ϵ�y(t��ng)�����O(sh��)Ӌ 2.1 ���ܽ�ͨ������ϵ�y(t��ng)��ͨ�з����O(sh��)Ӌ 2.2 ���ܽ�ͨ������ϵ�y(t��ng)�Ĺ���Ҫ�� 2.3 ���ܽ�ͨ������ϵ�y(t��ng)�Ļ�����(g��u)�ɼ�ԭ�� 2.4 ����С�Y(ji��) ��3�� ϵ�y(t��ng)Ӳ���·���O(sh��)Ӌ 3.1 ��ҪӲ�����x�� 3.1.1 ��Ƭ�C���x�� 3.1.2 ܇�����z�y���������x�� 3.1.3 �Դ�·���x�� 3.2 ϵ�y(t��ng)Ӳ�����·��(g��u)�ɼ�ԭ�� 3.2.1 ϵ�y(t��ng)Ӳ���·��(g��u)�� 3.2.2 ϵ�y(t��ng)����ԭ�� 3.3 AT89S51��Ƭ�C���� 3.3.1 ��Ƭ�C�ĸ��� 3.3.2 AT89S51��Ҫ���_���� 3.3.3 AT89S51оƬ��Сϵ�y(t��ng) 3.4 ܇�����z�yģ�K��B 3.4.1 ����_�P(gu��n)�Ĺ���ԭ�� 3.4.2 ����_�P(gu��n)�ķ�� 3.4.3 ����_�P(gu��n)�đ�(y��ng)�� 3.5 ����Ӳ����B 3.5.1 �l(f��)����O�� 3.5.2 �߶�LED ��(sh��)�a�� 3.5.3 �Դ�·�O(sh��)Ӌ 3.5.4 ���Q�� 3.6 ����С�Y(ji��) ��4�� ܛ���O(sh��)Ӌ 4.1 �������O(sh��)Ӌ 4.2 ܇�����ɘӳ����O(sh��)Ӌ 4.3 �@ʾ�����O(sh��)Ӌ 4.4 ��Փ���A(ch��)֪�R 4.4.1 ���r��ԭ�� 4.4.2 ܛ���ӕrԭ�� 4.5 ����С�Y(ji��) ��5�� ���ܽ�ͨ���ķ��� 5.1 Proteusܛ����B 5.2 �����^�̽�B 5.2.1 ��PROTEUS�L��ԭ��D 5.2.2 PROTEUS����Ƭ�C��(n��i)�˵ķ��� 5.2.3 ����Y(ji��)���c���� 5.3 ����С�Y(ji��) �Y(ji��)���Z �����īI �x �o �� �
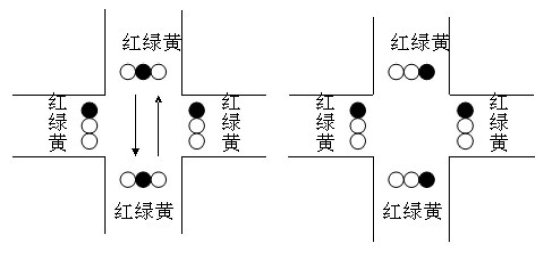
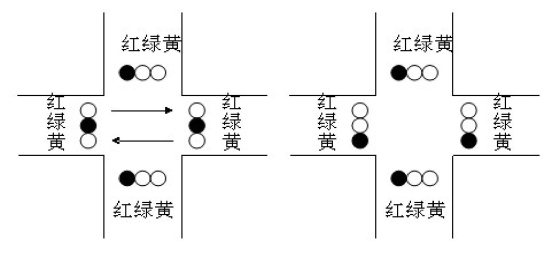
��1�� �wՓ ��2�� ������ͨ������ϵ�y(t��ng)�����O(sh��)Ӌ2.1 ���ܽ�ͨ������ϵ�y(t��ng)��ͨ�з����O(sh��)Ӌ �O(sh��)��ʮ��·�ڣ��֞�|������ϱ�������һ�r��ֻ��һ������ͨ�У���һ������У����m(x��)һ���r�g����(j��ng)�^�̕����^�ɕr�g����ͨ�н��з���?q��)��Q������w��B(t��i)���D��ʾ���f������ɫ��ʾ������ɫ��ʾ�硣��ͨ��B(t��i)�Ġ�B(t��i)1�_ʼ׃�Q��ֱ����B(t��i)4Ȼ��ѭ�h(hu��n)����B(t��i)1���ܶ���ʼ������D2.1��ʾ�� �D2.1 ��ͨ��B(t��i) ͨ�^���w��·�ڽ�ͨ����B(t��i)����ʾ�����҂������@�Ă���B(t��i)�w�{���£� ��1���ϱ��G�������|���t�������ˠ�B(t��i)�£��ϱ����Sͨ�У��|����ֹͨ�С� ��2���ϱ��S�������|�����ּt�������ˠ�B(t��i)�³����ѽ�(j��ng)����ͨ���е���������܇�v����ȴ���B(t��i)�D(zhu��n)�Q�� ��3���|���G�������ϱ��t�������ˠ�B(t��i)�£��|�����Sͨ�У��ϱ���ֹͨ�С� ��4���|���S�������ϱ����ּt�������ˠ�B(t��i)�³����ѽ�(j��ng)����ͨ���е���������܇�v����ȴ���B(t��i)�D(zhu��n)�Q�� �����ÈD����ʾ����B(t��i)����ֹ��B(t��i)���P(gu��n)ϵ���£� ��2-1��ͨ��B(t��i)���t�G����B(t��i) �|���ϱ��Ă�·�ھ��мt�G�S3���͔�(sh��)�a�@ʾ��2��������һ��·�ڣ����t����ֹͨ�У��D(zhu��n)�G�����Sͨ�У�֮���S����������ֹ��B(t��i)��׃�Q����B(t��i)���t�G����B(t��i)���2.1��ʾ���f����0��ʾ�磬1��ʾ���� 2.2 ���ܽ�ͨ������ϵ�y(t��ng)�Ĺ���Ҫ�� ���O(sh��)Ӌ��ģ�M�����Ľ�ͨ����ϵ�y(t��ng)���üt�G�S����ʾ���У�ͨ�к͵ȴ�����̖�l(f��)����߀���M�е�Ӌ�r�@ʾ��܇�����z�y���{(di��o)�����e�`�ȹ��ܡ� ��1����Ӌ�r�@ʾ ��Ӌ�r�@ʾ���������{�T����̖����ɫ�l(f��)����׃�ĕr�g���ڡ�ֹͣ���͡�ͨ�^�������g�������m���x���{�T�������ձ鶼Ը���x���е�Ӌ�r�@ʾ����̖���Ʒ�ʽ�������J���е�Ӌ�r�@ʾ��·�ڸ���ȫ����Ӌ�r�@ʾ���Á�p���{�T����̖��ɫ��׃���P(gu��n)�I�r���������s�Д��1�N�����������������{�T��ɫ�l(f��)����׃�ĕr�g�������{�T�ڡ�ֹͣ���͡�ͨ�^�������g�������m���x�� ��2���t�G���@ʾ �t�G���@ʾ����ֱ�^�ĸ��V�{�T���У�ͨ�к͵ȴ�����̖�����O(sh��)Ӌ�t�G�����ķN��B(t��i)�������ϱ��G�������|���t������һ���r�g���ϱ��S���_ʼ�W�q�����m(x��)5s���|���ּt�����������ϱ���t�������|���G������һ���r�g�|���S���W�q�����m(x��)5s���ϱ��ּt������ ��3��܇�����z�y���{(di��o)�� �S���҇���(j��ng)�����O(sh��)����l(f��)չ�������˿ں͙C��܇�������ڼ������L����ͨ��������Ӵ�ͨ��D�����F(xi��n)����څ���أ���ͨ�¹ʕr�аl(f��)����܇�v�z�y���������ܽ�ͨϵ�y(t��ng)�Ļ����M�ɲ��֣������ܽ�ͨϵ�y(t��ng)��ռ����Ҫ�ĵ�λ���F(xi��n)�A�Σ�܇�v�z�y���z�y��ʽ�кܶ࣬�����䃞(y��u)ȱ�c�����b�����z�y�����ŸБ�(y��ng)܇�v�z�y�����t�⾀܇�v�z�y���ȡ�ͨ�^���^�ϱ���͖|�����܇�������{(di��o)��(ji��)�t�G�����g���r�g�� 2.3 ���ܽ�ͨ������ϵ�y(t��ng)�Ļ�����(g��u)�ɼ�ԭ�� ��Ƭ�C�O(sh��)Ӌ��ͨ������ϵ�y(t��ng)�����Æ�Ƭ�Cֱ�ӿ�����̖���Ġ�B(t��i)׃���������Ͽ���ָ�]��ͨ�ľ��wͨ�У���Ȼ������LED��(sh��)�a�ܾͿ����@ʾ��Ӌ�r��������ʹ�ߣ��������Ի�����ϵ�y(t��ng)�ڴ˻��A(ch��)�ϣ�������܇�����z�y�·���Ƭ�C�ɼ���(sh��)��(j��)����Ƭ�C�����M�о��w̎�������r�{(di��o)������ָ�]�����˳�Խҕ�Xָ�]�ľ����ԣ�ͬ�r���Ϸ��Q������ �X�ϼӏ���ָ�]�������á�
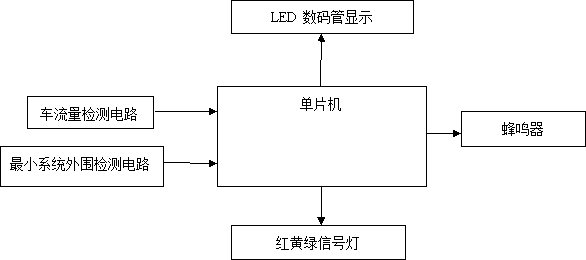
�D2.2 ϵ�y(t��ng)�Ŀ��w��D ���O(sh��)Ӌϵ�y(t��ng)�Ԇ�Ƭ�C����ƺ��ģ���܇�����z�yģ�K�a(ch��n)��ݔ�룬��̖����B(t��i)ģ�K��LED��Ӌ�rģ�K�ͷ��Q����B(t��i)ģ�K����ݔ����ϵ�y(t��ng)�Ŀ��w��D��D2.2��ʾ�� 2.4 ����С�Y(ji��) ������Ҫ�����ܽ�ͨ������ϵ�y(t��ng)�����O(sh��)Ӌ�M���˽�B�����������ܽ�ͨ������ϵ�y(t��ng)�Ĺ���Ҫ���Լ�ϵ�y(t��ng)�Ŀ��w��ܡ� ��3�� ϵ�y(t��ng)Ӳ���·���O(sh��)Ӌ 3.1 ��ҪӲ�����x�� ���F(xi��n)���O(sh��)ӋҪ��ľ��w���ܣ������Æ�Ƭ�C�����������(g��u)����С����ϵ�y(t��ng)��12���l(f��)����O�ֳܷ�4�M�t�G�S��ɫ����(g��u)����̖��ָʾģ�K��8��LED�|���ϱ����ɂ���(g��u)�ɵ�Ӌ�r�@ʾģ�K��܇�����z�y�������ɼ�������(sh��)��(j��)��1�����Q���M�Ј� 3.1.1 ��Ƭ�C���x�� ����AT89S51��Ƭ�C��������������AT89S51���Ѓɂ�16λ���r��/Ӌ��(sh��)����5���Д�Դ�����ڌ�܇�����M�ж��r�Д��z�y��32��I/O����ʹ���������I/O���(q��)�Ӕ�(sh��)�a�ܼ���ͨ�����ⲿ���A����ַ����ROM��RAM64K������ϵ�y(t��ng)�Uչ����T0��T1�ڿ��Ԍ��ⲿ�}�_�M�Ќ��rӋ��(sh��)�������ʿ��Է��㌍�F(xi��n)܇�����z�y��̖��ݔ�롣�x��AT89S51��Ƭ�C��������Ƭ�C��ȣ���(j��ng)�����ݣ��M���O(sh��)ӋҪ���x��AT89S51��Ƭ�C�������������� 3.1.2 ܇�����z�y���������x�� ܇�����z�y�����������N�������£� ����һ�� �����b�����z�y��(RTMS)������ͨ�z�y�����������_�����{(di��o)�l���g(sh��)ԭ����ͨ�^�l(f��)�������l�ʞ�10.525GHz��24.200GHz���B�m(x��)�l���{(di��o)����(FMCW)���ڙz�y·���ϣ�Ͷӳһ�����Ȟ�3-4�ף��L�Ȟ�64��������ÿ��܇�vͨ�^�@����Ͷӳ�^(q��)�r��������RTMS����һ������̖��RTMS���շ��������̖����Ӌ������l�ʺ͕r�g��׃������(sh��)�Եó�܇�v���ٶȼ��L�ȣ��ṩ܇��������·ռ���ʡ��ٶȺ�܇�͵Ȍ��r��Ϣ�����˙z�y��܇����܇�Ĕ�(sh��)����RTMS�������İl(f��)�䷽������2M��һ�������չ̽�y���w��������15�ȷ�����(n��i)ͶӰ�γ�һ���֞�32��ʮ����ęE�A�β�����(�E�A�Č���ȡ�Q�ڃx���x��Ĺ�����ʽ)��ͨ�^�@�N��ʽ�əz�y��܇����(sh��)RTMS���ЃɷN������ʹ��ģʽ���քe��·߅��(c��)��ģʽ��ǰ������ģʽ��·߅��(c��)��ģʽ����ʹ��һ�_RTMSͬ�r�z�y����8�l܇�������ṩÿ�l܇���Ľ�ͨ��Ϣ��ǰ������ģʽ����һ�_RTMS���r�z�yһ�l��һ܇���Ľ�ͨ��r��RTMS�ęz�y���ȸߣ�����һ��ȫ����܇�v�z�y���� �������� ���ôŸБ�(y��ng)܇�v�z�y��.�@�N�h(hu��n)�ξ�Ȧ�z�y���ǂ��y(t��ng)�Ľ�ͨ�z�y������Ŀǰ��������������һ�N�z�y�O(sh��)�䡣�@Щ���O(sh��)�ڵ�·�����µľ�Ȧ���ԙz�y��܇�vͨ�^�r��늴�׃���M�����_�������ͨ��������ͨ�����ǽ�ͨ�y(t��ng)Ӌ�ͽ�ͨҎ(gu��)���Ļ�����(sh��)��(j��)��ͨ�^�@Щ�z�y�Y(ji��)�������Á�Ӌ��ռ����(������ͨ�ܶ�)�� ��ʹ���p��Ȧģʽ�r߀�����ṩ�ٶȡ�܇�v����܇�ͷ�Ȕ�(sh��)��(j��)���@Щ��(sh��)��(j��)���ڽ�ͨ�����ͽy(t��ng)Ӌ�ǘO����Ҫ�ġ�ԭ������D���£�
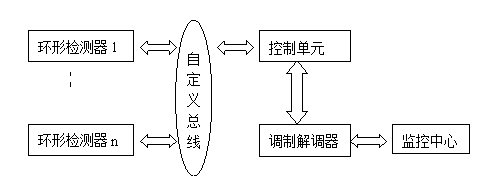
�D3.1 �řz�y������D ԓ�����y�������^�ã������ܷ�(w��n)���� �������� ���üt�⾀܇�v�z�y�����t�⾀܇�v�z�y�������ñ��z�y��������ړ����䣬ͨ�^ͬ����·�z�y���w�Пo�����w�����ڽ��٣������ܷ���⾀�����w���ɱ��z�y������_�P(gu��n)��ݔ������ڰl(f��)�������D(zhu��n)�Q�����̖������������ٸ���(j��)���յ��Ĺ⾀�ď������Пo��Ŀ�����w�M��̽�y���箔��܇ͨ�^�����^(q��)��r�����ֻ�ȫ���������ړ����Ķ����F(xi��n)��܇�v��(sh��)��(j��)�ľC�ϙz�y�������ù���_�P(gu��n)���g(sh��)�����и���푑�(y��ng)�����ɔ_�ԏ������ܐ��Ӛ���l�������w�ɫ��Ӱ푵ă�(y��u)�c�����Ұ��b���㡣 ����һ��r�ߣ������ܭh(hu��n)��Ӱ푣��������茢�z�y������ص��£����ѽ��ɵ�·ʹ�ò����㡣�������ԃr�ȸߣ����O(sh��)Ӌ���Σ���(qu��n)�����ף����x�÷������� �ڱ�ϵ�y(t��ng)�У����Ì���ʽ�t�⾀����_�P(gu��n)HJS18-M14DNK�z�y܇������ԓ�t�⾀����_�P(gu��n)����늉���ֱ��10-30V���z�y���x��10m��푑�(y��ng)�r�gС��3ms,����-25�桫55��Ĝضȗl������������������܇�vͨ�^����_�P(gu��n)֮�g�r��ݔ���ˌ�ݔ��һ���_�P(gu��n)��̖�������Ƭ�C����Ƭ�C��(zh��)������(y��ng)�����Ԅӌ�ݔ����̖�M��Ӌ��(sh��)���Ķ���Ɍ�܇�����Ľy(t��ng)Ӌ�� 3.1.3 �Դ�·���x�� ���چ�Ƭ�C�����r��Ҫ+5V늉�,�������O(sh��)Ӌ�Դ�·�r,��Ҫһ�����˷�(w��n)�������ṩ+5V늉��� ���˷�(w��n)��������Ҫ�ЃɷN��һ�Nݔ��늉��ǹ̶��ģ��Q��̶�ݔ�����˷�(w��n)��������һ�Nݔ��늉��ǿ��{(di��o)�ģ��Q����{(di��o)ݔ�����˷�(w��n)̫���������ԭ����ͬ�������ô�(li��n)�ͷ�(w��n)���·���ھ��Լ��ɷ�(w��n)�����У��������˷�(w��n)����ֻ�������������ӣ��������Ԫ���٣�ʹ�÷��㣬���ܷ�(w��n)�����r������ȃ�(y��u)�c������õ��V����(y��ng)�á� ���˷�(w��n)������ͨ�îa(ch��n)Ʒ��78ϵ�У����Դ����79ϵ�У�ؓ�Դ����ݔ��늉��ɾ��w��̖�еĺ���ɂ���(sh��)�ִ�������5V��6V��8V��9V��12V��15V��18V��24V�șn�Ρ� ����7805�܉��ṩ5V늉������˷�(w��n)���Դ,�ڌ��H���·�����Б�(y��ng)���������Դ�·�^��V��,����ͨ�����Ԫ�����̈������N������ُ�I,���Ҽ��g(sh��)��������.7805һ�_���Դݔ���,���_�鹫���ӵض�,���_�����҂�����Ҫ��+5V늉�ݔ����.���IJ�������͵�7805�ṩ늉����·,����7805��1�_�����ӵض�(��2�_)֮�g����0.3��F�����,�ڹ����ӵض˺����_+5V늉�ݔ����֮�g����0.1��F����ݡ� 3.2 ϵ�y(t��ng)Ӳ�����·��(g��u)�ɼ�ԭ�� 3.2.1 ϵ�y(t��ng)Ӳ���·��(g��u)�� ��ϵ�y(t��ng)���F(xi��n)���nj�����ʮ��·�ڽ�ͨ�Ŀ��ƣ��������ֽM�ɣ� (1)��Ϣ�IJɼ����֣� (2)��Ƭ�C�Ԅӿ��Ʋ��֣� (3)�@ʾ���֡� ϵ�y(t��ng)�Ԇ�Ƭ�C����ģ��M��һ����܇�����ɼ���̎�����Ԅӿ��ƞ�һ�����_�h(hu��n)����ϵ�y(t��ng)�� ϵ�y(t��ng)Ӳ���·��܇�����z�y�·����Ƭ�C����B(t��i)����LED�@ʾ�����Q���M�ɡ�����w��Ӳ���·���D��D��ʾ�� P0����������cP2����LED��(sh��)�a�ܣ�P1���ڿ��Ƽt�G�S�l(f��)����O�ܣ� INT1�ڽӷ��Q����XTAL1��XTAL2���뾧��r��·��RESET���_���Ϗ�λ�·��T1�ڽ�܇������������
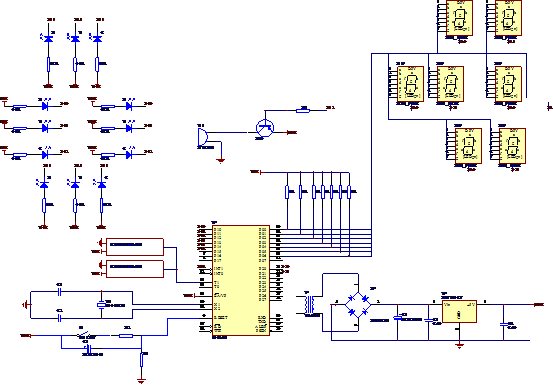
�D3.2 ���w�O(sh��)Ӌ�·�D 3.2.2 ϵ�y(t��ng)����ԭ�� ͨ�^܇�������������|�����ϱ��ɗlͨ����܇�����Ĝy������܇������Ϣ���}�_�ƽ�ķ�ʽ���o��Ƭ�C����Ƭ�C��ͨ�^�����\��õ��ɗlͨ��܇�����Ĵ�С������·�ڸ�����ļt�G���r�L������LED�@ʾ����һ�������������ȡһ�Δ�(sh��)��(j��)�� ��Ϣ�ɼ���Ҫ�nj�·�ڸ������܇�����M�вɼ�������P(gu��n)ϵ���Ă�����ͨ�Еr�g�L���Ă�����ͨ�Еr�g�̡�Ŀǰ�����ù�W�������������Դ_��ÿ��·����һ���r�g��܇�vͨ�^�ĴΔ�(sh��)�����O(sh��)Ӌ���ñ����ķ������üt�⾀������ֻӋ�������^�ɂ�����·��܇�����ı�ֵ���ɡ� �O(sh��)Ӌ܇������������һ�����ʖ|������ȡ�ӣ���һ�����ϱ�����ȡ�ӣ��քeȡ�Ãɂ�����|�����ϱ�����܇����a��b���Æ�Ƭ�CѲ�ؙz�y�����������M�б��^����������Ȅt��һ���r�g�g�����挧ͨ����a>b���M��a����G���ӕr����֮���M��b����G���ӕr����ԓ���Ƴ����ָ���(j��)���w�ı������r�L��׃�Q���@Щ����ȫ���Ɇ�Ƭ�C��ɡ���Ƭ�Cͨ�^�ӿڵõ�a��b������(y��ng)��늉���̖����Ȼ�����M��̎�����������Д࣬��׃��̖��ݔ���r�L��ֱ�ӿ�����̖���(q��)���·�����F(xi��n)��Ƭ�C����̖�������ܿ��ơ� ��ϵ�y(t��ng)���@ʾ��B(t��i)����LED��(sh��)�a�ܣ�����B(t��i)�aֵ���@P1�ڣ���Ҫ�@ʾ�ĕr�gֵ���@P0�ں���P2�ځ��xͨLED��(sh��)�a�ܵ��@ʾ��ͨ���ڴ�ͬ�r��50ms�����ڣ���ܛ������Ӌ�r1�룬���_1s��Ҫ���r�gֵ�p1��ˢ��LED��(sh��)�a�ܡ� ԓ���ܽ�ͨ������ϵ�y(t��ng)���Ă���B(t��i)��һ����ѭ�h(hu��n)��ÿ�Mһ����B(t��i)ѭ�h(hu��n)���ڣ��t회��z�y����܇������(sh��)��(j��)̎��һ�Σ��Д��ɂ�����Ľ�ͨ�p�ؾ�����r�����{(di��o)���´Π�B(t��i)ѭ�h(hu��n)�ļt�G���r�g�����_���Ԅӿ��Ƶ�Ŀ�ġ�
3.4 ܇�����z�yģ�K��B �ڱ�ϵ�y(t��ng)�У����Ì���ʽ�t�⾀����_�P(gu��n)HJS18-M14DNK�z�y܇������ԓ����������늉���ֱ��10-30V���z�y���x��10m��푑�(y��ng)�r�gС��3ms,����-25�桫55��Ĝضȗl������������������܇�vͨ�^����_�P(gu��n)֮�g�r��ݔ���ˌ�ݔ��һ���_�P(gu��n)��̖�������Ƭ�C����Ƭ�C��(zh��)������(y��ng)�����Ԅӌ�ݔ����̖�M��Ӌ��(sh��)���Ķ���Ɍ�܇�����Ľy(t��ng)Ӌ�� ܇�����z�y�������Ɍ���Ƭ�C����ϵ�y(t��ng)�ṩ���r��(sh��)��(j��)��ϵ�y(t��ng)�����@��(sh��)��(j��)�M��̎�������F(xi��n)�t�G�����Ʊ�횽�Q����ǰʮ��·�ڵĽ�ͨ��r�ęz�y�� ��������¹���: 1.ݔ�����IJɼ���ϵ�y(t��ng)�ɼ��ɂ�ݔ���������ɂ������܇������ 2.ݔ�����Ĵ_�J�����t�G���r�gֵ�� ���˲ɼ�������(sh��)��(j��)����ʮ��·�ڵ��Ă�(c��)���O(sh��)��2�����������քe�z�y�ɂ������܇������܇�����z�y������KĿ�ģ���ÿ�낀ѭ�h(hu��n)���ڣ�ϵ�y(t��ng)���z�y���ɂ������܇������(sh��)��(j��)�����ԕr�g����ô�Ϳ��Եõ���λ�r�g��܇������Ȼ����^�ɂ������λ�r�g܇�������٣��Դ_����һ��ѭ�h(hu��n)�t�G���r�g���_���{(di��o)����Ŀ�ġ� 3.4.1 ����_�P(gu��n)�Ĺ���ԭ�� ����_�P(gu��n)����늂��������ǹ�늽ӽ��_�P(gu��n)�ĺ��Q���������ñ��z�y��������ړ����䣬��ͬ����·�xͨ�·���Ķ��z�y���w�Пo�ġ����w�����ڽ��٣������ܷ���⾀�����w���ɱ��z�y������_�P(gu��n)��ݔ������ڰl(f��)�������D(zhu��n)�Q�����̖������������ٸ���(j��)���յ��Ĺ⾀�ď������Пo��Ŀ�����w�M��̽�y���乤��ԭ��D��D3.6��ʾ�� 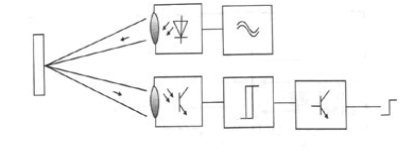
�D3.6 ����_�P(gu��n)����ԭ�����D �l(f��)��������Ŀ�˰l(f��)��������l(f��)��Ĺ���һ����ڰ댧�w��Դ���l(f��)����O��(LED)��������O�ܼ��t��l(f��)����O�ܡ��������g��ذl(f��)�䣬���߸�׃�}�_���ȡ��������й�늶��O�ܡ�������O�ܡ���늳ؽM�ɡ��ڽ�������ǰ�棬�b�й�WԪ�����R��Ȧ�ȡ���������Ǚz�y�·�����ܞV����Ч��̖�͑�(y��ng)��ԓ��̖�� 3.4.2 ����_�P(gu��n)�ķ�� ��1��������ʽ����_�P(gu��n) ����һ�N���l(f��)�����ͽ�������һ�w�Ă����������б��z�y���w��(j��ng)�^�r�����w������_�P(gu��n)�l(f��)�����l(f��)���������Ĺ⾀���䵽�����������ǹ���_�P(gu��n)�ͮa(ch��n)�����_�P(gu��n)��̖�������z�y���w�ı���������䷴���ʘO�ߕr��������ʽ�Ĺ���_�P(gu��n)�����x�ęz�yģʽ�� ��2���R����ʽ����_�P(gu��n) ���༯�l(f��)�����c��������һ�w������_�P(gu��n)�l(f��)�����l(f��)���Ĺ⾀��(j��ng)�^�����R����ؽ������������z�y���w��(j��ng)�^����ȫ���⾀�r������_�P(gu��n)�ͮa(ch��n)���˙z�y�_�P(gu��n)��̖�� ��3������ʽ����_�P(gu��n) ���������ڽY(ji��)��(g��u)������x�ҹ��S�������õİl(f��)�����ͽ��������l(f��)�����l(f��)���Ĺ⾀ֱ���M��������������z�y���w��(j��ng)�^�l(f��)�����ͽ�����֮�g�����⾀�r������_�P(gu��n)�ͮa(ch��n)�����_�P(gu��n)��̖�����z�y���w�鲻���r������ʽ����_�P(gu��n)����ɿ��ęz�y�b�á� ��4����ʽ����_�P(gu��n) ��ͨ�����ؘʵ�U���ͽY(ji��)��(g��u)����l(f��)�����ͽ������քeλ��U�Ͳ۵ă�߅�����γ�һ���S�������z�y���w��(j��ng)�^U�Ͳ��������S�r������_�P(gu��n)�ͮa(ch��n)�����_�P(gu��n)����̖����ʽ����_�P(gu��n)���^�m�ϙz�y�����\�ӵ����w���������ֱܷ����c�������w,ʹ�ð�ȫ�ɿ��� ��5�����wʽ����_�P(gu��n) ���������ϻ������w�������������⾀�����Ԍ����x�h�ı��z�y���w�M�Йz�y��ͨ�����w�������֞錦��ʽ��������ʽ�������wʽ����_�P(gu��n)��һЩȱ�c���m�˿��g�MС��늴Ÿɔ_�ز�� 3.4.3 ����_�P(gu��n)�đ�(y��ng)�� �S���҇����I(y��)�Ԅӻ����g(sh��)��Ѹ�ٰl(f��)չ������_�P(gu��n)�Ԅӻ�Ԫ�������ձ���á���(y��ng)���I(l��ng)��Ҳ�ڲ����Uչ�����ü����·���g(sh��)��SMT���氲�b��ˇ���������һ������_�P(gu��n)�����������ӕr��չ������ͬ��������ɔ_���ɿ��Ըߡ������^(q��)��(w��n)�������\������ܻ����ܡ��@�N�·f�Ĺ���_�P(gu��n)��һ�N�����}�_�{(di��o)�Ƶ�����ʽ���̽�yϵ�y(t��ng)������_�P(gu��n)������ʹ�õ����Դ�мt��⡢�tɫ�⡢�Gɫ����{ɫ��ȣ��ɷǽ��|���o�p���ؙz�y�Ϳ��Ƹ��N���w��������_�P(gu��n)�����w�eС�����ܶࡢ�����L�����ȸߡ�푑�(y��ng)�ٶȿ졢�z�y���x�h�Լ����⡢늡��Ÿɔ_�������ȃ�(y��u)�c�� Ŀǰ���@�N���͵Ĺ���_�P(gu��n)�ѱ�������λ�z�y��Һλ���ơ��a(ch��n)ƷӋ��(sh��)�������Єe���ٶșz�y�����L���С����R�e����̖�ӕr���Ԅ��T���С�ɫ�˙z�����_���ͼ��ЙC�Լ���ȫ���o���T���I(l��ng)�� 3.5 ����Ӳ����B 3.5.1 �l(f��)����O�� ����(j��)���O(sh��)Ӌ�����c���t�G�����@ʾ�����٣��t�G�����@ʾ������ͨ�İl(f��)����O�ܡ�ÿ���������O(sh��)�üt�G�S��������4�M������|���t���������ϱ�������ǾG��������֮��Ȼ��������Ӳ�����B�ӈD��Ҳ�nj��Q�ֲ��ģ���D3.7��ʾ�� 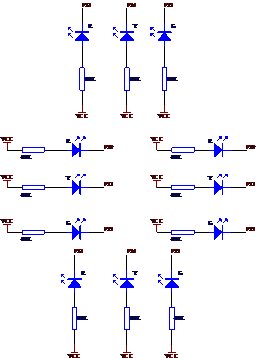
�D3.7 ��̖�����B��
3.5.3 �Դ�·�O(sh��)Ӌ ������AT89S51��Ƭ�C�����Դ�����O��߀�ǔ�(sh��)�a�ܵ��(q��)�ӣ���Ҫ�õ�+5V��ֱ���Դ����ˣ�һ����(w��n)���ġ����m(x��)��+5Vֱ���Դ����ϵ�y(t��ng)ʮ����Ҫ�����O(sh��)Ӌ�\�Ø�ʽ�����·���������D(zhu��n)�Q��ֱ�����ɞ�������·�ṩ�㶨��+5Vֱ����220V���ҵĽ���늉�����(j��ng)׃�������D(zhu��n)�Q��15V���ҵ�늉����ٽ�(j��ng)ȫ������늘������õ�һ��0-8V���ҵIJ���ֱ�����@һ���ӵ�ֱ�ӽ�(j��ng)�^늽����C4�V���õ�һ���^ƽ��(w��n)��ֱ�����ٽ�(j��ng)�^LM7805��(w��n)����+5V�õ���(w��n)����+5Vֱ���������ϵ�y(t��ng)�ṩ��(w��n)��늉������C�·�ķ�(w��n)���ԺͿ��ɔ_�ԣ����·��D3.9��ʾ���D��C5���ڵ���ݔ�뾀�^�L�r��늸�Ч��(y��ng)���Է�ֹ�·�a(ch��n)���Լ���ʎ���������^С�����O(sh��)Ӌ�x��Ğ�0.31��F����ݡ��D��C6��������ݔ��늉��еĸ��l�������O(sh��)Ӌ�x��0.1��F����ݡ� 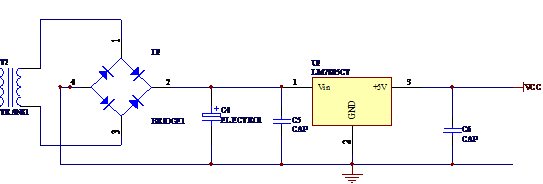
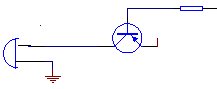
�D3.9 �Դ�· 3.5.4 ���Q�� ���O(sh��)Ӌ����һ����Q�������Q��ʹ��PNP���O���M���(q��)�ӿ��ƣ����B�ӵ���Ƭ�C�ϵ����_ݔ������ƽ��PNP��ͨ�����Q�����Q�����B�ӵ���Ƭ�C�ϵ����_ݔ�����ƽ�r��PNP��ֹ�����Q��ֹͣ���Q����D3.10��ʾ
�D3.10 ���Q���B�� 3.6 ����С�Y(ji��) �������Ȍ���Ƭ�C��܇�������������Դģ�K�M�����x�ͣ�������B�˿��w�O(sh��)Ӌ�·�D�Ę�(g��u)�ɼ�ԭ������������Ԕ����B��AT89S51��Ƭ�C�������_�Ĺ��ܺ̓�(n��i)��оƬ���Լ�AT89S51��Ƭ�C����Сϵ�y(t��ng)�����IJ�����Ҫ��B�˼t�⾀��������ԭ�����������Ӳ���M���˽�B����l(f��)����O�ܣ�LED��(sh��)�a���Լ��Դ�·�ȡ� ��4�� ܛ���O(sh��)Ӌ Ӳ��ƽ�_�Y(ji��)��(g��u)һ���_������Ĺ��ܿ�ܻ����γɡ�ܛ����Ӳ��ƽ�_�Ϙ�(g��u)������ɸ�����Ӳ���Ŀ��ƺͅf(xi��)�{(di��o)��ϵ�y(t��ng)��������ܛӲ����ͬ���F(xi��n)�ģ����ܛ���Ŀ���s�ԣ���K���F(xi��n)��ϵ�y(t��ng)���ܿɏ���������e���ܴܺ���ˣ�ϵ�y(t��ng)�DZ�ϵ�y(t��ng)���`�ꡣܛ������ģ�K���O(sh��)Ӌ�������������ھ��̺��{(di��o)ԇ��Ҳ���ԜpСܛ�������ʺ����ܛ���Ŀɿ��ԡ�ͬ�r����ܛ���M��ȫ��yԇҲ�Ǚz��e�`�ų����ϵ���Ҫ�ֶΡ��@���Ҳ����˳��õ�C�Z�Ծ��́팍�F(xi��n)�ġ� 4.1 �������O(sh��)Ӌ ���������̷֞��Ă���B(t��i)���£� ��1���ϱ��G�������|���t�������ˠ�B(t��i)�£��ϱ����Sͨ�У��|����ֹͨ�С� ��2���ϱ��S���W�q5s���|�����ּt�������ˠ�B(t��i)�³����ѽ�(j��ng)����ͨ���е���������܇�v����ȴ���B(t��i)�D(zhu��n)�Q�� ��3���|���G�������ϱ��t�������ˠ�B(t��i)�£��|�����Sͨ�У��ϱ���ֹͨ�С� ��4���|���S���W�q5s���ϱ����ּt�������ˠ�B(t��i)�³����ѽ�(j��ng)����ͨ���е���������܇�v����ȴ���B(t��i)�D(zhu��n)�Q�� ��������ò�ԃ��ʽ���r���@ȡ��ͨ���ĸ��N��B(t��i)�����������̈D��D4.1��ʾ�� 4.2 ܇�����ɘӳ����O(sh��)Ӌ ܇�����ɘӳ�����Ҫ�����DzɘӸ�·�ڵ�܇������ÿ�μt���D(zhu��n)�Q�ɾG��ǰ���댦·��܇�����M�вɘӣ�Ȼ�����(j��)�ɘӺ�õ���܇�����Ĵ�С������t�G���ĕr�g������(j��)�ɷ���܇�����ı����ֳ�5���^(q��)��С��0.4��0.4-0.8��0.8-1.2��1.2-1.6������1.6�� �r�g�{(di��o)���ڴ�ֻ����5������������С��0.4����ʾ�ϱ�����܇������ͨ���|������܇������D��������0.4-0.8�r����ʾ�ϱ�����܇�����Ȗ|��܇�����١�������0.8-1.2�r����ʾ�ϱ�܇�����c�|��܇������������1.2-1.6�r����ʾ�ϱ�܇�����Ȗ|��܇�����ࡣ��������1.6�r����ʾ�ϱ�����܇������D���|������܇������ͨ���r�g�O(sh��)����40s����ʣ���������1.2-1.6�r���ϱ��G���r�g����10s���|���G���r�g�p��10s����������1.6���ϕr���ϱ��G���r�g����20s���|���G���r�g�p��20s����������0.4-0.8�r���ϱ��G���r�g�p��10s���|���G���r�g����10s����������0.4���r���ϱ��G���r�g�p��20s���|���G���r�g����20s���������̈D��D4.2��ʾ�� ����(j��)�t�G���r�g�{(di��o)��ԭ����һ����������count_SN��count_EW�зքe�惦���ϱ����|����܇�������������λ�r�g܇�������˕r�ϱ���r�g���|����r�g�քe�惦��tt_SN��tt_EW�У��t�ɂ���������������飨count_SN /tt_SN��/��count_EW/tt_EW��=( count_SN * tt_EW)��(count_EW * tt_SN),�@Ȼԓ������1����?gu��)�С�?sh��)��ֵ��Ȼ����Ƭ�C������ֻȡ����(sh��)����Ҫ�Ĕ�(sh��)��(j��)��Ϣ�͕��Gʧ�����Ա��O(sh��)Ӌ�����Ȍ�(R5*R1)����10��������׃?y��u)?0���ҵ�ֵ����ԓ����ֵ����A��Ȼ�����(j��)A�Ĵ�С�M�Еr�g�{(di��o)�������w�r�g�O(sh��)�ñ�4-1. ��4-1 �������{(di��o)���r�g
 �D4.1 ���������̈D �D4.1 ���������̈D
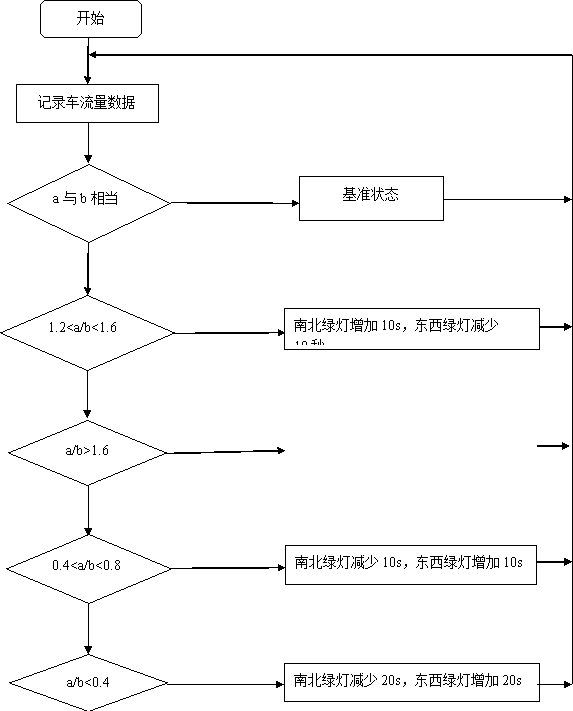
4.2 ܇�����������̈D
4.3 �@ʾ�����O(sh��)Ӌ
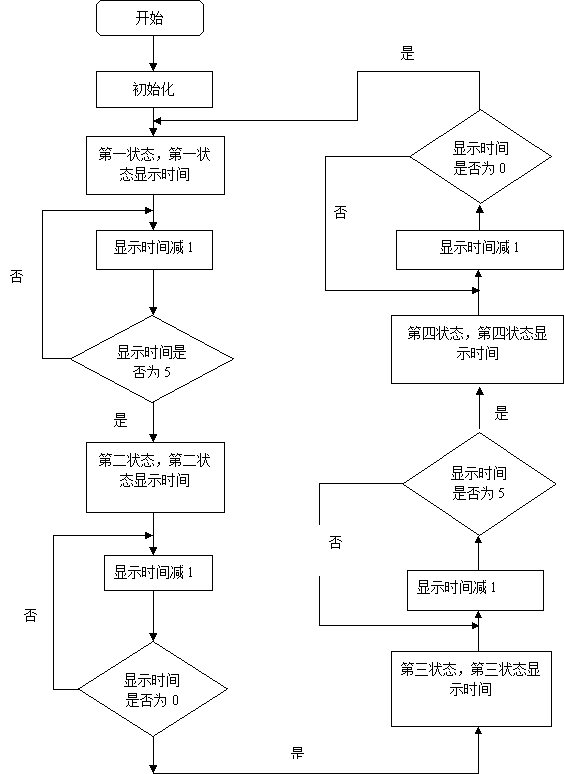
��ͨ���ĕr�g�@ʾ��Ҫ��ͨ�^��(sh��)�a�ܣ����O(sh��)Ӌ���ÄӑB(t��i)�@ʾ��(sh��)�a�ܡ������̈D��D4.3��ʾ�� 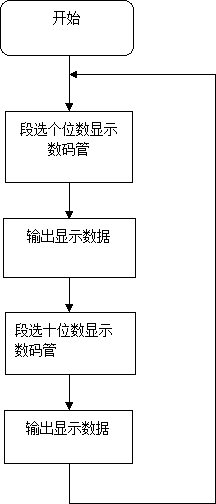 �D4.3 �@ʾ�������̈D 4.4 ��Փ���A(ch��)֪�R 4.4.1 ���r��ԭ�� ���r�������Ļ���ԭ���䌍���ǽo��ֵ���������1ֱ���p���ģֵ���@����ֵ���͵�TH��TL�еġ������Լӷ�ӛ��(sh��)�ģ�����ȫ1��ȫ0�r�ԄӮa(ch��n)������Д�Ո����ˣ��҂�����Ӌ��(sh��)��ӛ�M���������Ӌ��(sh��)ֵ������Ҫ���Ӌ��(sh��)ֵ�O(sh��)����C����Ӌ��(sh��)��ֵ�O(sh��)����TC �ɵõ�����Ӌ��ͨʽ�� TC=M-C ʽ�У�M��Ӌ��(sh��)��ģֵ��Ӌ��(sh��)ֵ������Ŀ�ģ�Ŀ���Ǖr�gֵ���O(sh��)Ӌ1�εĕr�g�������r��Ӌ��(sh��)�}�_�����ڞ�T0�����dž�Ƭ�Cϵ�y(t��ng)���l���ڵ�12�����O(sh��)Ҫ��ĕr�gֵ��T���t��C=T��T0��Ӌ��ͨʽ׃?y��u)�?/font> T=��M��TC��T0 ģֵ��Ӌ��(sh��)��������ʽ���P(gu��n)���ڷ�ʽ0�rM��8192���ڷ�ʽ1�rM��ֵ��65536���ڷ�ʽ2��3��256���ʹ˿���������N��ʽ������ӕr�����Ƭ�C�����}�_�l�ʞ�12MHZ����(j��ng)�^12���l�������÷�ʽ0����ӕrֻ��8.129���룬���÷�ʽ������ӕrҲֻ��65.536���롣�@���Ǟ�ʲô�������ڞ�50ms��ԭ�� ��ʹ��ܛ���t�����R�������̣��@Ȼ�����С��෴���r�gӋ�r����s������ֻ��Ӌ��(sh��)��������@Ȼ1����ѽ�(j��ng)���^��Ӌ��(sh��)������r�g�������҂�߀��횲��ö��r����ܛ����Y(ji��)�ϵ��k�����ܽ�Q�@�����}�� 4.4.2 ܛ���ӕrԭ�� MCS-51�Ĺ����l�ʞ�12MHZ���C�������c���l���P(gu��n)���C�����������l��12��������һ���C�����ڵĕr�g��12*��1/12MHZ��=1us���҂�����֪�����wÿ�lָ������ڔ�(sh��)���@���҂��Ϳ���ͨ�^ָ��Ĉ�(zh��)�Зl��(sh��)���_��1��ĕr�g����ͬ�r���چ�Ƭ�C���\���ٶȺܿ�������ָ���(zh��)�Еr�g���Ժ��Բ�Ӌ�� �҂��O(sh��)��һ����ֵ��20��ܛ��Ӌ��(sh��)����ʹT0���r50���롣�@��ÿ��T0��50����rCPU��푑�(y��ng)��������Д�Ո���M�������Д����(w��)�ӳ������Д����(w��)�ӳ����У�CPU��ʹܛ��Ӌ��(sh��)���p1��Ȼ���Д����Ƿ���㡣�����ʾ1���ѵ����O(sh��)�����r����Ҫ���r50���룬��T0��횹����ڷ�ʽ1��Ҫ���ֵ��TC=M-T*T0=216-50ms/1us=15536=3CBOH. 4.5 ����С�Y(ji��) ������Ҫ�����ܽ�ͨ��ܛ�������M���˽�B����Ҫ���������������ܛ���O(sh��)Ӌ˼·��ԭ������ͨ����������O(sh��)Ӌ��܇�����ɘӳ�����O(sh��)Ӌ�Լ���(sh��)�a���@ʾ������O(sh��)Ӌ���������˶��r��ԭ����ܛ���ӕrԭ����
��5�� ���ܽ�ͨ���ķ��� 5.1 Proteusܛ����B Proteusܛ����Ӣ��Labcenter electronics��˾�_�l(f��)���·�����c��������ܛ�������\����Windows����ϵ�y(t��ng)�ϣ����Է��桢������SPICE�����Nģ�M�����ͼ����·��ܛ�������c�ǣ� ��1�����F(xi��n)�ˆ�Ƭ�C�����SPICE�·������Y(ji��)�ϡ�����ģ�M�·���桢��(sh��)���·���桢��Ƭ�C����·�M�ɵ�ϵ�y(t��ng)�ķ��桢RS232�ӑB(t��i)���桢IIC�{(di��o)ԇ����SPI�{(di��o)ԇ�����I�P��LCDϵ�y(t��ng)����Ĺ��ܣ����N̓�M�x������ʾ������߉�����x����̖�l(f��)�������� ��2��֧��������Ƭ�Cϵ�y(t��ng)�ķ��档Ŀǰ֧�ֵĆ�Ƭ�C����У�6800ϵ�С�8051ϵ�С�AVRϵ�С�PIC14ϵ�С�PIC16ϵ�С�PIC18ϵ�С�Z80ϵ�С�HC11ϵ���Լ����N���оƬ�� ��3���ṩܛ���{(di��o)ԇ���ܡ�Ӳ������ϵ�y(t��ng)�о���ȫ�١��β����O(sh��)�Ô��c���{(di��o)ԇ���ܣ�ͬ�r�����^�����׃�����Ĵ����ȵĮ�ǰ��B(t��i)�������ԓܛ������ϵ�y(t��ng)�У���횾����@Щ���ܣ�ͬ�r֧�ֵ�������ܛ�����g���{(di��o)ԇ�h(hu��n)������Keil C51 uVison4��ܛ���� ��4�����Џ����ԭ��D�L�ƹ��ܡ���֮��ԓܛ����һ���Ƭ�C��SPICE������һ���ķ���ܛ�������ܷdz����� 5.2 �����^�̽�B 5.2.1 ��PROTEUS�L��ԭ��D �\��PROTEUS VSM��ISIS����F(xi��n)����(y��ng)�Ľ��棬�c��ĖŸ�^(q��)����L�D�^(q��)�������(c��)���Ϸ����·�D���[�^(q��)���·��t��Ԫ�����б�^(q��)���Γ�P����F(xi��n)��Pick Device����Ԫ�����Č�Ԓ��ݔ����Ҫ���ӵ��������Q���tԓ�����͕����F(xi��n)���҂�(c��)���Γ�OK���o�����һ��Ԫ���������ӡ��؏������^�̣����Ӻ��·������Ҫ��Ԫ��������Ԫ�����б�^(q��)�x��ijԪ���������·�D���[�^(q��)�����F(xi��n)ԓԪ����������ˌ��������L�D�^(q��)����������Ҫ��Ԫ�������L�D�^(q��)���úã����_ʼ�B�����B�������ܺ��Σ����������Ԫ�������_����F(xi��n)һ��Сʮ�֣��ٴΆΓ����I�������һ���B�����ڲ����r�������Ҫ�D(zhu��n)����������Ҫ�D(zhu��n)��̎�Γ�������I��
5.2.2 PROTEUS����Ƭ�C��(n��i)�˵ķ���
PROTEUSǶ��ʽϵ�y(t��ng)����ܛ�����O(sh��)Ӌ�r���ѽ�(j��ng)ע��͆�Ƭ�C���N���g����������ˣ��������Ժ�Keil��Wave6000�Ⱦ��gģ�Mܛ���Y(ji��)��ʹ�á����Keilʹ�÷��㣬���Џ����ܛ�������Ӳ�����湦�ܡ���Proteus��Keil�Y(ji��)�������{(di��o)ԇӲ���ͷ����˺ö࣬�Ҳ��õľ��ǡ�Proteus+Keil���ķ��淽�������w���E���£� �����\��PROTEUS VSM��ISIS,����ԭ��D����������I�p���Ƭ�C���F(xi��n)��D5.1��ʾ���x���a���ɹ��ߌ�Ԓ�� 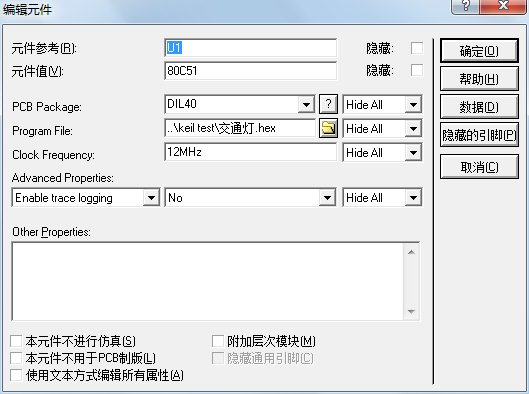
�D5.1 ���x���a���ɹ��ߌ�Ԓ�� ��Keilܛ�����ó������g��������(y��ng)��HEX�ļ����·�D�L����ɺ�������AT89S52�đ�(y��ng)�ó����������AT89S51�ϣ��p��������I�����_��D5.2��ʾ�Č�Ԓ����Program File�����Ӿ��g�õ�ʮ���M�Ƹ�ʽ�ij����ļ�AA.hex�����Խ���3�N��ʽ���ļ������ٽoAT89S52ݔ�뾧���l�ʡ���̎Ĭ�J��12MHZ���Γ�OK���o��ɳ������ӹ���������Ϳ����M��ϵ�y(t��ng)�����ˡ��Γ��������·��İ��o�_ʼϵ�y(t��ng)���档PROTEUS VSM���M�е���һ�N����ʽ���棬�ڷ����M���п��Ԍ������ư��o���_�P(gu��n)���M�в�����ϵ�y(t��ng)��ݔ���푑�(y��ng)�����挍�ķ�ӳ���������@��������_ʼ������_�P(gu��n)���oͨ�^��ˆΓ����׃��B(t��i)����׃�Ġ�B(t��i)����LED�͔�(sh��)�a���@ʾ������
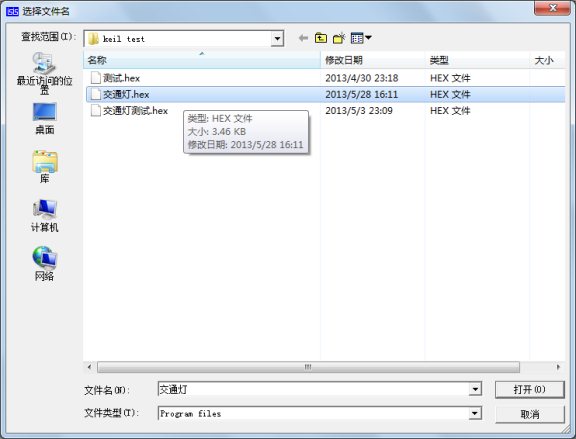
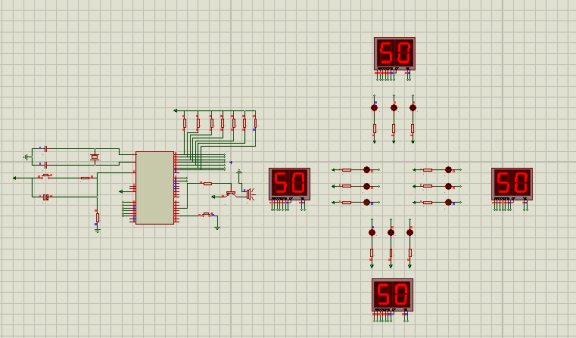
�D5.2 ��(chu��ng)��Դ���a��Ԓ�� 5.2.3 ����Y(ji��)���c���� �O(sh��)�ϱ����a·�ڣ��|����܇��b·�ڡ� ��1������ͨ���_ʼ������(zh��)�г�ʼ��B(t��i)��ϵ�y(t��ng)�Ԅ��M���B(t��i)1���ϱ���G�����|����t������Ӌ�r40�롣��Ӌ�r��5s�r���ϱ����S���_ʼ�W�q5s���|���ּt����Ȼ�|����G�������ϱ���t��������Ӌ�r40�롣��Ӌ�r��5s�r���|�����S���_ʼ�W�q5s���ϱ��ּt��������Y(ji��)����D5.3��ʾ�� 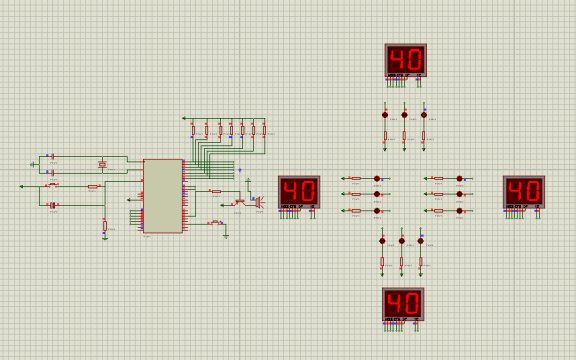
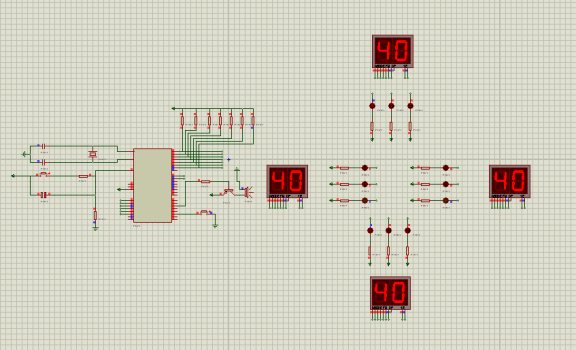
�D5.3 Ĭ�J��B(t��i)����D ��2�����քӰ����_�P(gu��n)��ʹa·��܇�����cb·�������ஔ�r����0.5<a/b<=1.2�r��ϵ�y(t��ng)���t�G���r�g�{(di��o)����40s��40s���ϱ���G�����|����t������Ӌ�r40�롣��Ӌ�r��5s�r���ϱ����S���_ʼ�W�q5s���|���ּt����Ȼ�|����G�������ϱ���t��������Ӌ�r40�롣��Ӌ�r��5s�r���|�����S���_ʼ�W�q5s���ϱ��ּt��������Y(ji��)����D5.4��ʾ�� 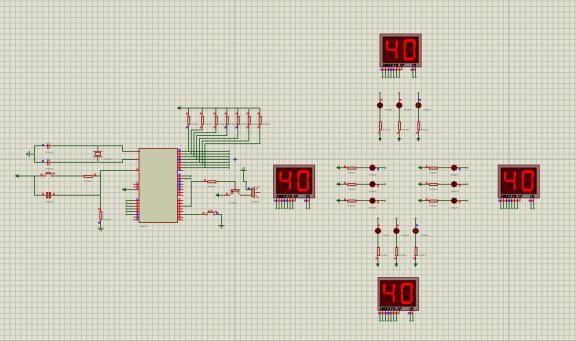
�D5.4 a/b=1�r����D ��3�����քӰ����_�P(gu��n)��ʹa·��܇��������b·������,��������1.2-1.6�r��ϵ�y(t��ng)���t�G���r�g�{(di��o)����50s��30s���ϱ���G�����|����t������Ӌ�r50�롣��Ӌ�r��5s�r���ϱ����S���_ʼ�W�q5s���|���ּt����Ȼ�|����G�������ϱ���t��������Ӌ�r30�롣��Ӌ�r��5s�r���|�����S���_ʼ�W�q5s���ϱ��ּt��������Y(ji��)����D5.5��ʾ�� 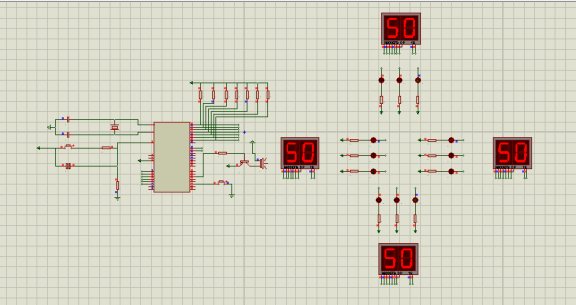
�D5.5 ������1.2-1.6�r����D ��4�����քӰ����_�P(gu��n)��������1.6���ϕr��ϵ�y(t��ng)���t�G���r�g�{(di��o)����60��20s���ϱ���G�����|����t������Ӌ�r60�롣��Ӌ�r��5s�r���ϱ����S���_ʼ�W�q5s���|���ּt����Ȼ�|����G�������ϱ���t��������Ӌ�r20�롣��Ӌ�r��5s�r���|�����S���_ʼ�W�q5s���ϱ��ּt��������Y(ji��)����D5.6��ʾ�� 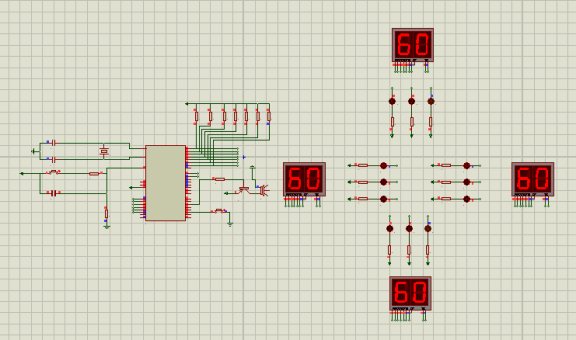
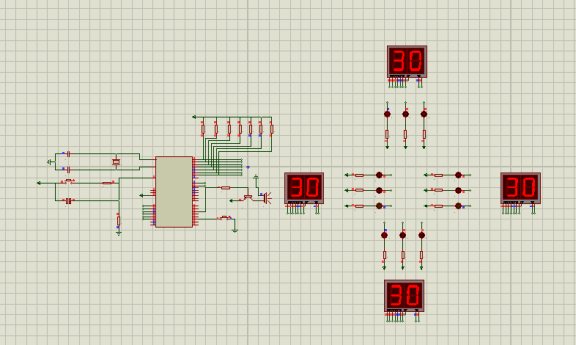
�D5.6 ��������1.6�r�ķ���D ��5�����քӰ����_�P(gu��n)��������0.4-0.8�r��ϵ�y(t��ng)���t�G���r�g�{(di��o)����30��50s���ϱ���G�����|����t������Ӌ�r30�롣��Ӌ�r��5s�r���ϱ����S���_ʼ�W�q5s���|���ּt����Ȼ�|����G�������ϱ���t��������Ӌ�r50�롣��Ӌ�r��5s�r���|�����S���_ʼ�W�q5s���ϱ��ּt��������Y(ji��)����D5.7��ʾ�� 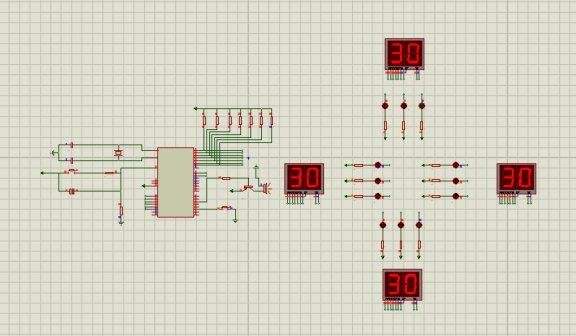
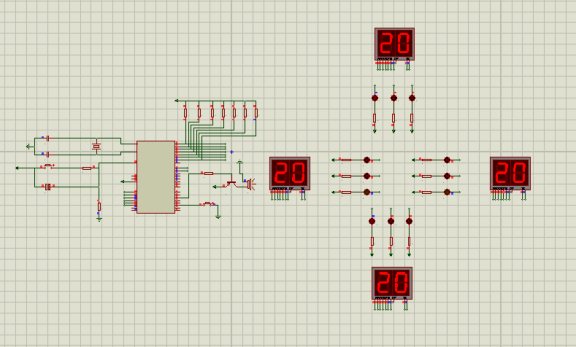
�D5.7 ������0.4-0.8�r�ķ���D ��6�����քӰ����_�P(gu��n)������С��0.4�r��ϵ�y(t��ng)���t�G���r�g�{(di��o)����20��60s���ϱ���G�����|����t������Ӌ�r20�롣��Ӌ�r��5s�r���ϱ����S���_ʼ�W�q5s���|���ּt����Ȼ�|����G�������ϱ���t��������Ӌ�r60�롣��Ӌ�r��5s�r���|�����S���_ʼ�W�q5s���ϱ��ּt��������Y(ji��)����D5.8��ʾ�� 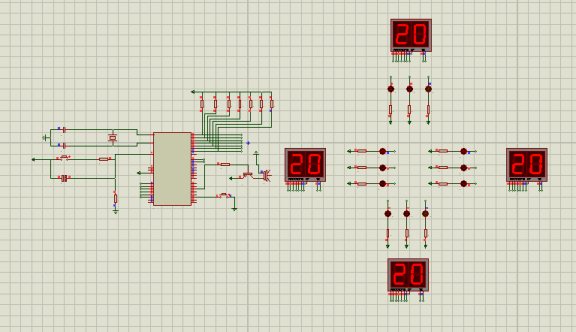 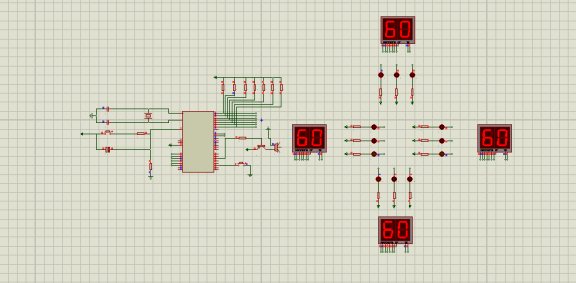
�D5.8 ����С��0.4�r�ķ���D 5.3 ����С�Y(ji��) �������Ȍ�proteusܛ���M���˽�B������չʾ�˸��N��r�ķ���ģ�M�D�� �Y(ji��)���Z ��ͨ�������ڽ�ͨ�\ݔ�I(l��ng)�������dz���Ҫ�����á���ϵ�y(t��ng)�����Ԇ�Ƭ�C�����Ŀ����������F(xi��n)�˂��y(t��ng)�ļt�G���@ʾ�͵��x�빦�ܣ����ܸ���(j��)܇������׃���Ԅ��{(di��o)���t�G���r�g�� ����ͨ�^��Ϣ�ɼ�����Ҫ�nj�·�ڸ������܇�����M�вɼ������O(sh��)Ӌ���ñ����ķ������üt�⾀������ֻӋ�������^�ɂ�����ͨ��·��܇�����ı�ֵ���ɡ�ԓϵ�y(t��ng)����ɼt�G����y(t��ng)�Ŀ��ƹ��ܣ��t�G�S����һ����Ҏ(gu��)������ѭ�h(hu��n)�@ʾ��������LED�@ʾ�����ԄӑB(t��i)����ķ�ʽ��ɵ�Ӌ�r���ܡ��ڴ˻��A(ch��)�ϣ�ͨ�^��������܇��������r�M�Д�(sh��)��(j��)�ɼ������ɼ��Ĕ�(sh��)��(j��)���}�_��̖�ķ�ʽ����߀�o�������ģ��M�з������^������(j��)���^�ĽY(ji��)���������w��܇�����D(zhu��n)�Q�Ƀ�܇������С�ı�ֵ������(j��)��ֵ�c�t�G���r�L���P(gu��n)ϵݔ���r�L������̖��ʹ��ͨ��̖���ɸ���(j��)܇������׃������˽���ڵ�ͨ��Ч�ʡ� ��Փ���ԬF(xi��n)�����ܽ�ͨ����Փ����A(ch��)��ͻ�Ƃ��y(t��ng)˼·��ʹ���}���������y�c���ٷ��ھ��w��܇�v��(sh��)�ī@�ã��Լ�܇�v��(sh��)�c�t�G���r�g�Ĕ�(sh��)�Wģ�͵Ľ�����ͨ�^������ȡ�Ã�·��܇�v��(sh��)�ı�ֵ����t�G��������λ���@�ڿ������Ǿ��Ⱥܵ͵ģ�����ֵ���딵(sh��)����(y��ng)����(sh��)�Wģ�ͺ������������ڌ��F(xi��n)��ʹ���ܽ�ͨ��̖�����Փ�M�댍�`�ɞ�һ�N���ܡ�����ϵ�y(t��ng)�ĽY(ji��)��(g��u)���Σ��ɱ��^�͡���(j��ng)�Mһ���о������ƣ���������?q��)��H��(y��ng)�á�
�x �o �����O(sh��)Ӌ���ڷ���˴����Y�ϣ��Լ��ںμ��ώ��Ĵ���������֧������ɵġ������O(sh��)Ӌ��Ϥ��ָ����������S�����F����Ҋ�ͽ��h�������҂���Q���S���y�}�����҂����O(sh��)Ӌ�������P(gu��n)��Ҫ�����ã�����@ʾ��һλ��(j��ng)��S���Ľ̎�����֮���С��W�R֮�Y���� ���O(sh��)Ӌ�^���У�������ǜ\�����Hʹ���Ɍ��n���ϵ�֪�R�֜\�J�R���˸��Mһ�������⣬����߀�e���˺ܶ��n�������֪�R���_����ҵ�ҕҰ���S�����ҵă�(n��i)����ͬ�r߀�e���˺ܶ����F�Ľ�(j��ng)�����˪���˼������������Ȼ���@���^����Ҳ�l(f��)�F(xi��n)�Լ�߀���S���֮̎���������^�̌��ҁ��f����һ�����H���ۺ����@���ҁ��f�o����һ�P���F��ؔ��������Ĵ�W������Y(ji��)���ˣ����@������ζ���W���ĽKֹ���ڽ��Ĺ����͌W���У���߀Ҫ����ČW����������S���Ͱl(f��)չ�Լ���֪�R���������ߺ������Լ���������M���� �O(sh��)Ӌ�^���dz䌍�ģ���(n��i)�����S���ģ��ҏ��Ы@���˸���ӵ�֪�R��ͬ�rҲ呟����ҵ���־�����B(y��ng)���ҵ����ĺͼ��µĹ������L�͇�֔?sh��)ĿƌW�B(t��i)�ȣ��˽��˹������D�����@�����Ժ�Ĺ����͌W���Ǵ��Ў����ġ� �����O(sh��)Ӌ���ں��ώ�������ָ��������ͬ�W�Ĵ����f(xi��)������ɵģ��ڴ�������x��
�� � ���A����ͨ���·�D
���B:��ͨ�����Ƴ�����Ҋ������
#include<reg51.h>
������Word��ʽ�ęn51�����d��ַ��
 ���چ�Ƭ�C�����ܽ�ͨ������ϵ�y(t��ng)���O(sh��)Ӌ.doc
(1.27 MB, ���d��(sh��): 100)
���چ�Ƭ�C�����ܽ�ͨ������ϵ�y(t��ng)���O(sh��)Ӌ.doc
(1.27 MB, ���d��(sh��): 100)
2018-4-9 21:27 �ς�
�c���ļ������d����
���d�e��: �ڎ� -5
| 




 ����TQQ:125739409;���g(sh��)����QQȺ281945664
����TQQ:125739409;���g(sh��)����QQȺ281945664





 QQ���Ѻ�Ⱥ
QQ���Ѻ�Ⱥ QQ���g
QQ���g �vӍ��
�vӍ�� �vӍ����
�vӍ���� �ղ�
�ղ� ����
���� �
� ��
��