題目:LED路燈照度檢測系統設計
姓名:張*
學號:201405070027
院系:機械與電氣工程學院
專業:自動化
年級班級:級自動化(1)班
指導教師:劉偉
目錄
摘要
引言
1緒論
11LED照明發展概述
12LED檢測技術
121LED光電檢測發展概述5
122LED照度檢測發展現狀5
13LED檢測技術發展趨勢5
14課題的研究的意義5
15論文的組織結構5
2照度檢測工作原理
21光度量
211光通量
212發光強度……7
213光照強度7
214光亮度7
22光照強度檢測基本特性7
221人眼視覺特性7
222余弦特性7
23LED路燈光度量檢測方法7
231光通量測量10
232光照強度測量…11
233顏色特性測量11
234分布光度計………11
24小結13
3照度檢測系統硬件電路設計14
31光電傳感器14
311光電傳感器選型14
312硅光電池特性及原理15
313硅光電池參數17
314光照度測量探頭要求19
32放大電路設計22
321光電前置放大電路22
322自動量程轉換24
323二級放大電路26
324濾波電路26
33控制電路設計27
331單片機系統電路27
332復位電路28
333串口通信電路28
34A/D轉換電路設計29
35顯示電路設計30
36電源模塊設計31
37小結32
4LED路燈照度檢測軟件設計33
41單片機軟件編程33
411單片機軟件設置33
412單片機編譯調試環境36
42A/D轉換軟件設計36
43量程轉換軟件實現40
44液晶顯示軟件實現41
45串口通信軟件43
46光照強度標定軟件實現44
47小結45
5系統噪聲分析及處理46
51系統內部噪聲及處理46
511電阻熱噪聲46
512工頻噪聲47
5131/f噪聲47
514散彈噪聲和爆裂噪聲48
515地噪聲49
52運算放大器的噪聲49
521輸入失調電壓49
522輸入偏置電流50
53PCB布線處理50
54小結51
6系統測試52
61系統硬件電路測試52
611模塊化測試52
612系統整體測試52
62誤差分析及處理54
63小結54
7總結與展望55
參考文獻。。57
致謝58
附錄161
附錄262
LED路燈照度檢測系統設計 摘要 隨著“十二五”節能減排計劃的推進,LED光源發光效率的不斷突破,國家發改委宣布,普通照明白熾燈將在未來五年將逐步退出市場。LED照明光源的廣泛應用,以及不同于傳統光源的檢測方法,給LED光源檢測提出了新的要求,完善的檢測標準和檢測方法有利于資源的整合,有利于加速LED產品的快速發展,因此,LED光源檢測對于產業發展具有重要的作用。LED路燈作為LED照明光源之一,LED路燈燈具尺寸與普通照明用LED光源差別較大,LED路燈檢測環境條件要求嚴格,檢測難度大,檢測設備要求高,造成了檢測成本高,檢測方法普及性差。設計一種較為簡易,具有較高精確度的LED路燈光學性質檢測系統具有必要性。綜合國內外LED路燈光源檢測方法,文中采用燈具旋轉式分布光度計,通過傳感器固定,燈具旋轉的方式,測量LED路燈全空間范圍的光照強度。本文完成了光傳感器修正,并給出了光照強度測量的設計方案,詳細描述了硬件電路設計和軟件控制方案。電路主要由運算放大電路、A/D轉換電路、單片機控制電路和顯示電路組成。采用具有高靈敏度、高線性度的硅光電池作為光傳感器,經過人眼視覺特性曲線V(λ)和余弦修正后的硅光電池,將采集到的光信號輸出為線性、穩定的電流信號,通過ICL7650前置放大電路將微弱電流放大到電壓信號,經濾波處理,再經二級放大電路放大到適合采集的電壓。由于光信號強度變化范圍跨度大,采用了MAX4602模擬開關自動調節前置放大量程。放大電路輸出的電壓值輸入到16位高精度A/D轉換電路器MAX1134,將電壓信號轉換成數字信號,經單片機控制在液晶上顯示轉換值。根據光照強度與距離平方反比定律,通過軟件修正和校準照度檢測系統。經過系統測試,驗證了LED路燈照度檢測系統基本上達到設計要求。
引言(一級標題、頂格、加粗、宋體四號、1.5倍行距) 1879年,愛迪生發明了鎢絲燈,成為第一盞具有實用價值的燈,開啟了人 類照明發展的新時代。直到20世紀50年代,英國科學家發現了砷化鎵發出的電 致發光和紅外輻射,從而誕生了第一個現代的發光二極管(LED)[1]。伴隨著科學研究的深入,橙色光、黃色光和綠光的發光二極管相繼制造出來,并且發光二極管也遵循自身的摩爾定律,大約每18個月亮度提高2倍左右。發光二極管發光效率和光能量的不斷提高,LED在大屏幕顯示、景觀照明及建筑物外觀照明、信號指示燈、汽車照明和普通照明等領域得到了廣泛應用。LED發光效率已遠遠高于一般性光源,但是由于價格和技術等因數,LED還未能普及照明市場。2011年11月,國家發改委、商務部等部門聯合發表了《關于逐步禁止進口和銷售普通照明白熾燈的公告》的公告,決定從2012年10月1日起,分階段按功率大小逐步禁止進口和銷售普通白熾燈[2]。白熾燈的即將退市,點亮了LED的發展前途。LED的興起,由于具有不同于傳統光源的發光原理,LED光電檢測方法也不盡相同,給LED檢測帶了新的課題[3]。LED路燈作為大功率光源,與傳統高壓鈉燈路燈相比,具有耗電少、壽命長、顯色性好等優點。目前,LED路燈已在多個城市試點安裝,但照明用LED檢測方法還不完善,檢測技術要求的正式標準還不健全,在分析光效、配光、光衰、色溫等技術問題上[4],還存在檢測的漏洞。若果檢測問題不解決,將會引起LED照明產品盲目發展,造成了產品混亂,不利于新產品的研發和市場的推廣應用。因此,LED照明檢測的發展將為制約LED照明發展的因素,檢測技術的進步和檢測標準的制定將會促進LED產業的合理發展,有利于資源的整合,對LED照明的發展具有重要的意義。 1.1LED照明發展概述 2011年聯合國氣候大會在南非城市德班召開,大會關注的主題是“節能減排”,減少對地球環境的污染。“節能減排”的目標就是節約能源、降低能源消耗、減少污染排放。LED照明將受益于節能減排計劃,將會推動LED產業的快速發展。從LED的誕生到現在,隨著LED光效的逐步提高,給世界各國照明市場帶來了新的希望。1968年,LED第一批產品應用于指示燈,發光效率僅為0.1lm/w,90年代期間,芯片尺寸和材料技術的發展使商用LED光通量提高了近20倍,1998年,Lumiled公司推出了1W級的大功率器件,LED第一次顯露出進入普通照明領域曙光[5]。在各國對半導體支持力度方面,日本在1998年率先開展“21世紀照明”計劃,要求LED發光效率提高到傳統熒光燈的兩倍。從2000年起,美國決定投資5億美元用于支持“國家半導體照明計劃”。歐盟在2000年宣布啟動“彩虹計劃”,補助推廣白光LED的應用。韓國從2000年到2008年的“GaN半導體計劃”,研究以GaN為材料的LED[6]。為了緊跟國外發達國家的新型能源的發展戰略,我國在2003年,由中國科技部牽頭開始建立半導體產業基地。2006年,半導體照明列為國家“十一五”重大科技攻關項目。2009年初,中國科技部推出“十城萬盞”計劃,旨在推動中國LED行業的發展,降低能耗,在21個國內發達城市實行路燈改造計劃,未來一段時間內,逐步擴大成新型LED 路燈。“十城萬盞”計劃推動了LED路燈的快速發展,LED路燈發光效率不斷提高。2011年10月31日,中華人民共和國工業和信息化部公布,由中國科學院福建物構所、三安光電股份有限公司及福建萬邦光電科技有限公司聯合研制出的LED路燈整體初始光效達到131.42lm/W,達到了世界最高值。 1.2LED檢測技術 1.2.1LED光電檢測發展概述 光電檢測是光學系統和電系統的結合,它將光輻射流經過一定規律的變換,形成帶有信息的光信號,并通過光電傳感器將光信號轉換為電信號[7],將微弱電信號放大后,經模數轉換變成數字信號,通過顯示設備顯示出檢測值的過程。 1960年成功研制紅寶石激光器后,相繼又發明了He-Ne激光的氣體激光器和GaAs半導體激光器。激光器推到了光電檢測技術的極大發展,不僅因為激光器給光電檢測儀器提供了主動照明的可能性,而且實現了傳送、接收和加工光電信息的方法,大大提高了光電檢測的精確性和抗干擾能力。 1970年,貝爾實驗室研制出了第一個攝像器件(CCD)[8],CCD不僅可以完成人眼視覺范圍的圖像測量,還能測量紅外波段和紫外波段的光譜測量。1982年,推出了隧道顯微鏡,能夠測量出微小尺寸的電荷密度,1986年原子力顯微鏡問世,提高了光電測量精度。微電子的問世,使得處理器得以高速發展。由于微機具有運算、處理、校驗、邏輯判斷、存儲等功能,檢測設備和微機相結合,使得光電檢測趨向于智能化發展[9]。 LED光源具有不同于傳統光源的發光原理。傳統光源是以熱輻射形式發出光,而LED是一種固態半導體器件,可以直接把電能轉化為光。LED 的最主要部件是一個半導體晶片,晶片的一端附在一個支架上,接電源負極,一端接電源正極,整個晶片被環氧樹脂封裝。當電流通過導線作用于半導體晶片的 PN結時,電子會被推向P區,P區的空穴和電子復合,就會以光子的形式發出光[10]。傳統光源是以自發輻射的方式發出光子。LED光源和傳統光源發光原理的差異,造成了光源光譜和光電檢測方面的特殊性。 LED光源與傳統光源的比較有以下特點: (1)LED體積小,外形尺寸各不相同,根據外形尺寸的不同應用于不同場所; (2)LED可以發出多種顏色,紫外光、綠光、黃色光、紅色光到紅外光,可以通過RGB混色得到白光; (3)LED的發光結構是一個PN結,因此,其光學參數與溫度變化有關; (4)LED有各種不同的配光曲線,沒有確定的光軸; (5)LED光學參數還與觀察角度有關。 LED的檢測方面,近年來,LED產業發展非常迅速,在技術方面不斷取得突破,應用越來越廣泛,人們對LED光、電、色參數的檢測也提出了更高的標準[11]。為此,國內外部分科研機構和企業研制出了一些具有較高水平的檢測設備和儀器。例如美國國家標準研究院(NIST)的分布光譜輻射計系統,德國國家計量院(PTB)的新一代分布光度計,英國國家物理實驗室(NPL)中心旋轉反射鏡式分布光度計,美國照明研究中心(LRC)的FLUX-O-METER分布光度計系統等[12-13]。 我國一直緊盯國際前沿檢測技術不斷開發適應于LED特性的檢測方法和設備,初步LED檢測體系已經形成,我國產業所需的多數儀器和相關檢測技術已能自主提供。國家科技部組織和部署了半導體照明標準檢測方面的863高新技術項目課題,通過自主創新解決LED檢測和標準方面的關鍵問題,在高新技術課題的帶動下,我國部分LED檢測技術和儀器不僅跟蹤了國際先進水平,在某些方面達到了國際領先水平,而且實現了完整的自主知識產權[14]。例如我國中國計量研究院的復合式大型自動分布光度計,以及遠方公司的全空間快速分布光度計系統已經達到國際水準,但從總體來說,相比于歐美發達國家在LED的檢測技術和標準,國內LED的檢測水相對比較落后,LED檢測技術和標準滯后于歐美等國家。 LED相關標準方面, 1924年國際照明委員會(CIE)正式推薦光譜效率函數V(λ)作為測量光的基本函數,1931年規定了顏色測量的三原色,1933年國際照明委員會(CIE)正式采用V(λ)函數[15]。1965年出版第一個版本的顯色指數標準(CIE13),到1974年發行主要的版本(CIE13.2),直到1995年,CIE13.3的出版是基于CIE13.2的改進版。LED發光效率的提高,引起人們對LED的重視,LED光電檢測方法的變化,相應的檢測標準也進行了完善和技術改進。2007年,CIE通過了CIE177-2007和CIE127-2007標準。CIE177-2007是對白光LED光源顯示指數制定的標準;CIE127-2007是關于LED光源的測量,是對CIE127-1997標準的補充和改進。國際電工委員會(IEC)發布的LED標準有IEC62031(2008)——普通LED模塊安全規范,IEC60838(2006)——LED模塊連接器的特殊要求。2008年,北美照明學會推出LM-79-2008標準——《固態照明產品批準的電氣和光度測量方法》,該標準被用作為美國商用LED產品和美國能源之星有效評估的主要參考之一。2004年,日本照明學會、日本照明委員會、日本電球工業協會和日本照明器具工業會共同制定了《照明用白色LED測光方法通則》,2006年發布了修訂版,增加了色度量和光通量方面的規范。我國標準化管理委員會在2009-2010年期間,頒布了LED新標準有:GB/T24824-2009普通照明用LED模塊測試方法、GB/T24823普通照明用LED模塊性能要求、GB/T24826普通照明用LED和LED模塊術語和定義和GB/T24819普通照明用LED模塊安全要求等標準[16]。 1.2.2LED照度檢測發展現狀 當前,LED照度檢測[17]主要分為便攜式照度計和大型分布光度計檢測系統。便攜式照度計一般用于日常生活中的光照強度測量,如果要求測量其他光參數,需要采用其他檢測設備,但便攜式照度計具有體積小、功耗低、方便攜帶等特點。而大型分布光度計主要用于實驗室或者檢測部門中,其體積大、設備昂貴,普及型不高,而且對于環境要求高,但是測量精度高一般性的光電檢測設備。LED照度檢測是利用光傳感器、控制電路和計算理論與技術對光進行測量。 如圖1.1所示,照度測量系統主要由光傳感器、運算放大電路、濾波電路、A/D部分、控制電路、顯示部分和電源部分組成。 
1.3LED檢測技術發展趨勢 現代檢測技術是科研部門及工業領域正常運轉的基礎,而光電檢測不僅是現 代檢測技術的重要組成部分,而且隨著獨特的檢測方式適合近代檢測的發展方 向,應用領域將越來越廣泛[18]。 光電檢測具有的特點: 隨著生產的發展,用于光電檢測的時間和人力將占相當大的比重,因此為了進一步提高生產率和自動化程度,要求光電檢測必須實現自動化。先進的檢測方法和儀器設備,應能在工業生產或者生活應用中進行自動測量,這樣既可減少工作人員,又可以節省檢測時間,提高生產率。光電檢測發展趨勢如圖1.2所示,微處理的應用將逐步取代人腦實現自動測量。 
由于無接觸,沒有力作用于被測物體,不會對檢測物體造成沖擊,對檢測儀表亦無損害。另外測量裝置具有壽命長、反映速度快、工作可靠、準確度高、對被測物無形狀和大小要求、檢測距離大等優點。 光電檢測設備采用集成芯片,檢測系統具有體積小、重量輕、工作可靠、壽 命長、使用方便和工作速度高等優點。 光電檢測采用數字化處理、顯示,具有測量精度高、靈敏度高、測量速度快、指示值客觀性、易于自動化等優點。 計算機具有數據運算、處理、校驗、邏輯判斷、存儲等功能。光電檢測系統 與它相結合后,能實現一般儀表無法實現的功能,使光電檢測系統的測量精度、速度和性能顯著提高。 1.4課題的研究的意義 LED照明產業作為新型能源,正處于高速發展時期,國內外各國紛紛加大對LED研發的投入,包括LED產品技術和LED相關標準。由于不同于傳統光源的發光原理,LED光電檢測的發展以及標準的制定,對于如何正確引導LED產業的健康發展至關重要。正確的LED光源光電檢測技術和完善的標準,能夠有效的規范市場,整合資源,為LED產品的研發和推廣起到關鍵性的作用。 本文結合與當前光照強度檢測發展特點以及LED路燈產品的特性[19],設計一種方便的LED路燈光照強度檢測系統,相比于普通照度計,能和其他光學參 量檢測模塊,通過計算機控制完成空間光強分布測量,該系統具有高的測量精度。 單獨使用可以用于日常生活中光照強度的測量。具有比大型分布光度計體積小、 成本低、使用范圍廣等優點。 1.5論文的組織結構 本課題研究的目的是設計LED路燈照度檢測系統。光照強度作為光學參量的幾個基本常量之一,與人們生活密切聯系著,因此在本文中對光照強度展開研 究與測量方法設計。主要研究內容如下: 1.緒論。分析國內光電測量發展現狀,介紹照度檢測的發展趨勢。 2.光照強度檢測工作原理。介紹光度量基本定律,及光度量測量方法,其中重點講解幾種常用LED路燈光照強度的測量方法。 3.光照強度檢測系統硬件電路設計。包括主控制電路、電源模塊、A/D轉換模塊和顯示模塊的設計。 4.光照強度檢測系統軟件設計。系統軟件和硬件結合,解決一些硬件遺留問題,并完成光照強度檢測系統的校準。 5.檢測系統噪聲分析,以及減少噪聲的方法和措施。 6.系統測試,給出了系統的一些硬件實物圖,并對系統的軟硬件做了系統測試。 7.總結與展望。總結了當前的主要工作,補充了其他光電參數的測方法,及未來工作的重點。 2.照度檢測工作原理 2.1光度量 光度量是光輻射量在人眼上的視覺感應強度值,由人眼的視覺功能特性可知,人眼對于不同波長的光,造成的響應度不同,能量相同但是波長不同的光,在人眼視覺中觸發的響應度不同。國際照明委員會(CIE)推薦采用平均值的方法,確定人眼視覺對各種波長的光的平均響應靈敏度,稱為光譜視見函數V(λ)。人眼對于光譜感應區間為380nm-780nm之間,V(λ)的在555nm處為最大值,規定在555nm處V(λ)=1,其他波長V(λ)均小于1。 表2.1列出了基本的光度量、定義式、單位和符號。 表2.1光度量和單位 
2.1.1光通量 光通量是指人眼視覺所能感覺到得光譜輻射強度值,它等于單位時間內發出的光亮值,如圖2.1所示,光通量的表達式為:  (2.1) (2.1)

圖2.1光通量空間示意圖 2.1.2發光強度 發光強度為光源在給定方向上單位立體角內發出的光通量,定義式為 I=dΦ/dω(2.2) 式(2.2)中,Φ表示光通量,ω為空間立體角,發光強度的單位是坎德拉(cd)。 2.1.3光照強度 光照強度定義為被照物體單位面積上入射的光通量,如圖2.2所示,光照強度定義式: E=dΦ/dA(2.3) 式(2.3)中,dΦ為給定點處的面元面積為dA上的光通量。光照強度的單位微機勒克斯(lx)。 光的傳播是通過能量傳播的,接收面上單位時間內接收到總輻射能成為該面 元的輻射通量,人眼感受到得輻射量是指單位時間內一定接受面的光能量,即光 通量Φ。由式(2.1)可知, dΦ=Igdω(2.4) 代人式(2.3)中得到, E=Igdω/dA(2.5) 如圖2.2所示,單位立體角dω表示為 dω=dAcosθ/I^2(2.6) 代入式(2.5)中得到, E=Icosθ/I^2(2.7) 
圖2.2單位立體角的光照強度 由式(2.7)可知,在某一方向上,當發光強度一定時,光照強度與距離的平方成反比關系,稱為照度測量的平方反比定律。 2.1.4光亮度 光源表面上一點的面積為dA,在給定方向上的發光強度dI與該面元在垂直給定方向的面元上的正投影面積之比,為該光源在該方向上的光亮度: L=dI/dAcosθ(2.8) 式(2.8)中,θ為給定方向與面元法線的夾角。光亮度的單位為坎德拉每平方米,單位為cd/m^2。 2.2光照強度檢測基本特性 2.2.1人眼視覺特性 人眼視覺的主要作用區域是視網膜,視網膜是把光信息轉換為神經信號送給大腦皮層視覺接受區[20]。由于人眼所具有的特殊功能,只能在380nm-780nm范 圍內的可見光有感應,超出范圍內的紅外、紫外光,人眼不具備感應到。而且由 于外界光譜的不同,使得人眼感應到不用的顏色即顏色視覺,因此人眼能夠感受 到外界色彩的變化。根據人眼視覺生理特性和亮度變化,分為明視覺、中間視覺和暗視覺。一般認為亮度水平大于3cd·m^-2為明視覺,0.001~3cd·m^-2范圍內的亮度為中間視覺,小于0.001cd·m^-2為暗視覺。人眼視網膜的生理構造決定了視覺不同。感光細胞能感受不同亮度的光線,把光轉換成神經脈沖。感光細胞分為柱狀細胞和錐狀細胞。柱狀細胞對光的敏感性強于錐狀細胞,能感應暗視覺條件下的光線,在較亮條件下,柱狀細胞響應度趨于飽和。而錐狀細胞主要感應較強光線。中間視覺條件下,柱狀細胞和錐狀細胞都能感光,感光細胞比例隨著光線強弱的變換而變換,所以中間視覺條件下的光譜函數有多種。 
圖2.3CIE推薦視覺光譜曲線 1918年,通過對研究193名觀察者美國照明工程學會得到了V(λ)函數,1923年NBS的Gibson用階梯法對V(λ)進行修正,使曲線達到圓滑和對稱。1924年,V(λ)函數被CIE正式推薦位國際標準人眼光譜視覺函數。LED路燈的光學檢測,由于路燈部分光亮度處于中間視覺條件下,目前道路照明檢測都采用明視覺光譜曲線測量,即1924年CIE推薦的視覺函數。視覺曲線如圖 2.3所示。 2.2.2余弦特性 根據光照強度定律,任一被照平面的光照度和入射光線與該被照平面法線方 向夾的余弦成正比,即在垂直方向上光強值最大,隨著角度增加,光強變小,這 種特性成為余弦特性。因此在實際測量中,為了得到更準確的測量值,需要在光 傳感器上加余弦修正玻璃。通常采用的余弦修正玻璃有平板狀和皿狀乳白色玻 璃,從表2.2數據可以看出,皿狀乳白色玻璃更適合用于光傳感器的余弦修正上。 表2.2幾種常見余弦修正玻璃 
2.3LED路燈光度量檢測方法 2.3.1光通量測量 光通量參數是描述光源特性的重要參數之一。一般測量光源的總光通量的方 法有三種[21]: 第一,采用分布光度計測量全空間光通量,采取小的步長和角度,通過空間 光強與光通量的數值關系積分計算出總光通量; 第二,采用積分球方法,利用已知光通量的標準燈和待測燈做比較測量,將 待測燈模塊放在積分球的中心,在積分球的側面開一個口,放置光傳感器,從而 得出待測燈的光通量。積分球測量光通量的前提條件是光源在積分球中能看做點光源,但是LED路燈燈具面積大,需要非常大的積分球才能滿足條件,因此LED路燈燈具的光通量測量方法一般采用空間分布光度法[22] 2.3.2光照強度測量[23] 光照強度的測量方法主要有手持式照度計、積分球和分光光度計。手持式照 度計主要用于日常生活中的光照強度的測量,方便攜帶、能耗低、測量精度有限; 積分球法測量光照強度一般用于小尺寸的光源,具有較高的測量精度;分光光度 計測量主要用于大尺寸光源,具有高的精度,能實現全空間的光照強度的測量。 2.3.3顏色特性測量 光源顏色測量可以分為三刺激值直讀法和光譜輻射測色法兩種,對于要求測 試準確度高時,應使用光譜輻射測色法。 三刺激值直讀法用光電色度計來測量,光電色度計的光譜靈敏度需要滿足標 準色度系統的色度函數要求,而且能直接測量光源色的色品坐標或三刺激值 [24]。 光譜輻射測色法是通過分光系統,將不同波長的光分離開,經過聚光系統到光傳感器接收面,小尺寸的光源滿足測量距離的條件下就能實現測量,大尺寸光 源需要采用分布法測量。 2.3.4分布光度計 分布光度計一般分為五種,傳感器旋轉式分布光度計、燈具旋轉式分布光度 計、雙鏡式分布光度計、圓周運動反光鏡式分布光度計和中心旋轉反光鏡式分布 光度計[25]。介紹如下: (1)傳感器旋轉式分布光度計[26]:當測量距離符合LED模塊的光強測量要 求時,通過固定LED固定模塊,轉動光傳感器,在設定平面內測量LED光強分布。采用傳感器旋轉式分布光度計主要用來測量小尺寸LED模塊的光照強度分布,但是由于難以滿足光強測量距離要求,一般不用于大尺寸LED模塊的光強測量。 
圖2.4傳感器旋轉式分布光度計 (2)燈具旋轉式分布光度計[27]:該方案采用傳感器固定,燈具旋轉方法測量光照強度。固定光學傳感器在檢測的一端,LED光源模塊繞分布光度計的水平軸和垂直軸旋轉,通過控制電路采樣LED光源模塊空間數據。這種檢測方式的優點在于系統結構簡單,系統穩定性高,檢測設備較為便宜。但是檢測系統中, 由于燈具的旋轉,造成LED光源模塊的發光不穩定,影響測量精度,需要特別考慮溫度的影響,必要的時候進行溫度修正[28]。. 
圖2.5燈具旋轉式分布光度計 (3)雙鏡式分布光度計:雙鏡式分布光度計中的LED光源模塊處于旋轉中心, LED模塊繞其垂直軸旋轉,旋轉反光鏡繞LED模塊旋轉,將LED模塊在某 一方向上測量光反射到遠處的第二塊反光鏡上,并通過第二塊反光鏡反射到光傳 感器中。在整個測量系統中,LED光源模塊在光度測量中始終保持靜止的燃點 姿態,發光穩定性高,而且檢測系統占用空間小。采用雙反射鏡對反射鏡具有很 高的要求。 
圖2.6雙鏡式分布光度計 (4)圓周運動反光鏡式分布光度計:圓周式運動反光鏡式分布光度計中的LED光源模塊處于旋轉中心,繞其自身垂直軸旋轉。反光鏡繞LED光源模塊旋轉,將在某一方向上測量光發射到旋轉反光鏡同步旋轉的光傳感器中。該測量系統中的LED光源模塊在光度取樣測量中保持靜止狀態,通過旋轉反光鏡的方式實現LED光源全空間的測量。該檢測系統優點是被測光源的發光穩定性高,但該檢測系統相對于雙鏡分布式光度計的缺點在于占用較大的空間,而且對反光鏡的要求比較高。 該檢測系統的設計是將帶長消光筒的同步旋轉光傳感器改為固定的光傳感 器,這樣的設計導致的后果是光傳感器開口較大而容易引入較多的信號光束和雜 散光不能垂直入射到光傳感器上,從而造成測量精度下降。 
圖2.7圓周運動反光鏡式分布光度計 (5)中心旋轉反光鏡式分布光度計:中心旋轉反光鏡式分布光度計中的反光鏡繞水平軸旋轉,而由燈臂夾持的被測光源繞反光鏡轉動,同時燈臂向相反方向繞輔助軸同步旋轉,以保持LED光源模塊中心位置不變,LED光源繞自身垂直軸轉動,反光鏡將被測光源的光反射到與主軸同軸的光度探測器上來測量。在該系統中,LED光源模塊能始終保持標準測量燃點姿態。然而由于LED光源模塊需在較大空間范圍內運動,LED光源模塊的發光穩定性不及雙鏡式分布光度計和圓周運動反光鏡式分布光度計兩種分布光度計系統。另外該系統要實現 LED光源模塊向上夾持的繞點姿態,轉臺部分需要占用更高的轉動空間。 
圖2.8中心旋轉反光鏡式分布光度計 通過常見五種空間分布光度計,考慮到LED路燈燈具面積大,發光方向性等特點[29],以及檢測系統的復雜性和檢測設備要求,因此,本文采用燈具旋轉式分布光度計測量LED路燈光學參數,能在較小的空間范圍內,簡單的檢測設 備實現LED路燈的照度的測量。 2.4小結 從介紹光學參量基本概念,光學檢測相關特性和定律,以及光學參量的測量方法,重點幾種分光光度計的測量方法,選擇合適的LED路燈光學參量的測量方法。 3.照度檢測系統硬件電路設計 3.1光電傳感器 1839年,法國科學家Becqueral在化學電池中第一次觀察到了光伏效應。1873年,發現了硒中的光導效應。1929年,建立的固體能帶理論,第一次論證了太陽能電池可以直接把光變成電能。 光電池是一種在光照條件下產生電動勢的半導體器件,隨著半導體技術的發 展,光電池特性得到了顯著的改善,廣泛應用于新型能源發電和光電檢測。常用 于光電檢測的光電池主要有硅光電池和硒光電池[30]。 3.1.1光電傳感器選型 1887年,赫茲發現了光電效應,在1905年,愛因斯坦提出了光子假設,成功解釋了光電效應。光電效應可以分為外光電效應和內光電效應。 外光電效應指當光照射到器件表面材料上時,光子的能量傳遞給表面材料上 的電子,當光子能量能使電子獲得足夠的能量,電子克服器件表面阻力進入外界 空間。內光電效應指光照射到器件表面時,吸收光子的能量使器件的電阻或電導 發生變化,由于吸收光子的器件沒有向外發射電子,僅僅是改變了器件內的電阻 或電導。 光電傳感器就是利用光電效應制造出來的,常用的光電傳感器有光電池、光 敏二極管、光敏晶體管、光敏三極管、光電倍增管以及光敏電阻等。 光敏電阻是基于內光電效應的半導體元器件。通過在摻雜半導體上鍍金屬, 交錯排列成梳妝的電極以增大光敏面積,而且光敏電阻易受潮濕影響,所以光敏 電阻密封在玻璃殼中。光敏電阻一般用于檢測較強的光信號,由于結構簡單,工 作壽命長等特點應用比較廣泛,但是存在非線性,受溫度影響比較大,一般不用 于精密光測量方面。 光電倍增管是利用二次電子發射制成的。當高速的電子照射到光電傳感器表面時,由于高速電子能量改變傳感器內電子能量狀態,使得一些電子逸出,產生二次電子發射[31]。當一次電子速度足夠大時,產生的二次電子很有可能比一次電子更多,通過二次發射原理制造出光電倍增管。由于光電倍增管的特性,在測量時允許測量的光通量非常小,一般用于極微弱的光條件下。當光強過強時,光電倍增管容易燒毀。 光電池作為一種特殊的半導體二極管,由PN結組成,通過在半導體硅中滲入一定微量的雜質組成。P型半導體是通過在半導體中滲入三價元素,形成帶正電的空穴。N型半導體通過在半導體中滲入五價元素,形成帶負電的自由電子。 當PN結處于反向偏壓時,在無光照射條件下,PN結反向電阻很大,反向電流很小;在有光的照射下,PN結內光轉換成電能產生空穴電子對,在電場的作用下,空穴電子分別向P區、N區移動形成光電流。通過這種方式工作的器件有光敏二極管、光敏晶體管。 在PN不加偏壓的條件下,當光照射到PN結上,當入射到傳感器表面的光能使電子獲得足夠的能量,使得由光子產生的自由電子和空穴分別向PN結兩端移動,使PN結兩端產生光生電動勢。光電池又可以分為硅光電池和硒光電池。硅光電池一般的光譜范圍為400~1100nm,硒光電池波長接近與人眼視覺感應波長范圍,但是在頻譜響應特性方面,硒光電池不如硅光電池好。 由于硅光電池性能穩定,光譜范圍寬,頻率特性好,轉換能效率高等特點, 以及根據硅光電池的原理分析,在本文中采用硅光電池作為LED路燈照度檢測系統的光傳感器。 3.1.2硅光電池特性及原理 硅光電池是根據光生伏特效應將光能轉變成電能而制成的光伏型器件,它由 半導體硅中滲入一定微量雜質而組成。當光照射在PN結上,由于光子產生的電子和空穴分別向P區和N區集結,使PN結兩端產生電動勢,即產生光生伏特效應。硅光電池的開路電壓最大值在0.6V左右,而且開路電壓跟光信號的變化為非線性關系,當光照強度為2000lx左右時,開路電壓就趨于飽和;短路電流跟光強度成線性關系,因此測量光信號用采集到的電流信號。開路電壓和短路電路的光照強度特性曲線如3.1所示。 
圖3.1硅光電池光照強度特性曲線 硅光電池的光譜長波取決于材料的禁帶寬度,短波受限于材料表面反射損失,但其峰值波長不僅與材料有關,而且與制作工藝和使用環境溫度不同而不同。硅光電池的光譜曲線如圖3.3所示,光譜響應范圍在400~1100nm之間,峰值 波長為900nm左右。 
圖3.3硅光電池光譜特性曲線 如圖3.4所示,顯示硅光電池開路電壓OCU與短路電流SCI隨溫度變化的關系,硅光電池的開路電壓隨溫度升高而降低,短路電流隨溫度升高而增大。溫度漂移是硅光電池作為光傳感器考慮的因素之一,應采取相應措施對測量進行補償。 
環境溫度°C 圖3.4硅光電池溫度特性曲線 對于PN型光電器件,PN結內空穴電子移動形成電流需要一定時間,所以 當光照變化很快時,變化速度超過硅光電池頻率響應時間,光電流就會滯后光照 變化。如圖3.5所示,反映了硅光電池和硒光電池頻率特性,從曲線可以看出硅光電池頻率曲線,在頻率小于4.5MHz時,頻率特性非常好,遠好與硒光電池頻率響應曲線。 
圖3.5硅光電池頻率特性曲線 3.1.3硅光電池參數 在光學檢測方面,由于要符合人眼特性,所以Hamamatsu公司推出了型號為S9219、S9219-01的硅光電池,該光傳感器光譜特性曲線符合人眼特性曲線,不 需要再經過V(λ)修正,并且暗電流小,靈敏度高等特點突出,適合高精度光的檢測,但是由于價格較高,使得檢測設備成本偏高,應用范圍有限。SFH5711是OSRAM公司推出的一款專門針對汽車照明、智能家居的光學傳感器,光譜曲線同樣符合人眼視覺函數,輸出電流與光照成對數關系,可采用接可變采樣電阻值,既可獲得合適的電壓值,該型號硅光電池價格低,適合消費類光的測量。 通過對各個廠家資料的比對選擇,以及實際條件,論文中采用Hamamatus公司生產的S1336-BQ硅光電池作為該照度檢測的光度探頭[33]。100lx光照條件下,輸出短路電流為10uA左右,當照度為1lx時,電流為100nA。大部分傳感器的光譜特性曲線都不符合人眼視覺函數,必須加濾光玻璃,1lx光照條件下輸出電流將更小。當暗電流相過大時,輸出短路電流將淹沒在暗電流中,所以在選擇硅光電池時,光譜曲線、暗電流、有效面積成為衡量硅光電池重要的參數。表3.1反應出硅光電池的基本參數,最大暗電流僅為50pA,但是峰值波長在 960nm附近,即硅光電池對于紅外波段的光敏感。要符合光照強度的測量,要對硅光電池進行人眼視覺修正。硅光電池光譜特性曲線如3.6所示。 
硅光電池S1336-BQ的基本參數如表3.1所示。 表3.1硅光電池基本參數 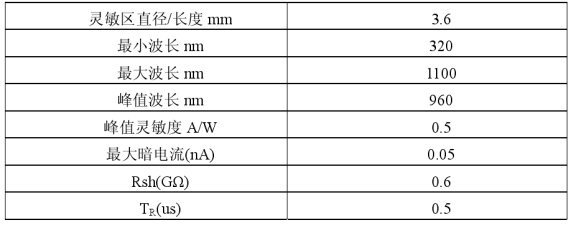
3.1.4光照度測量探頭要求 根據第二章關于人眼視覺特性的描述,對光照強度的測量要符合人眼視覺函數,所以需要對硅光電池進行V(λ)光譜修正。光譜修正一般采用濾光片,使得到達硅光電池的光譜符合人眼視覺特性曲線。濾光片的常用的匹配方法分為三種:(1)分離全濾光片法:濾光部分由多塊濾光片組成,相鄰濾光片之間存在縫隙,可以通過多塊濾光片疊加而成; (2)密接全濾光片法:由多塊濾光片組成,相鄰濾光片間無縫隙,一般加工工藝要求較高,將多塊濾光片做成一塊濾光片; (3)部分濾光片法:濾光部分由多塊濾光片組成,部分濾光片不是全面積 覆蓋傳感器表面。 由于條件限制,難以得到密接全濾光片,所以采用綜合實際情況要求,本課 題中采用的是分離全濾光片法,通過采用不同顏色的濾光片組成的濾光器。濾光 器的設計類似于濾波器,要得到人眼視覺曲線,類似于濾波器的帶通濾波器,通 過參考文獻數據和有色玻璃濾光曲線,選擇了三種玻璃組合成濾光片。三種玻璃 分別為青藍色玻璃(型號為QB21)、金黃色玻璃(JB470)、綠色玻璃(LB16)。光譜透射曲線如圖3.7~3.9所示,利用QB21光譜曲線的右枝,JB470光譜曲線的左枝,以及LB16光譜的中心波段組成濾光部分。 
圖3.8金黃色玻璃JB470T-λ曲線 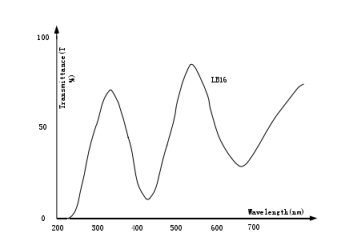
圖3.9綠色玻璃LB16T-λ曲線 3.2放大電路設計 3.2.1光電前置放大電路 硅光電池輸出的光信號非常微弱[34],需要經過運算放大其信號,因此要通過前置放大器初步放大后,采用二級放大電路放大到合適的A/D采樣范圍,同時 需要考慮降低噪聲和外界干擾的影響。根據前置運算放大器輸出信號的特點,一般可以分為積分型放大器和電流型放大器[35]。積分型放大器包括電壓靈敏型前 置放大器和電荷靈敏型前置放大器,積分型放大器輸出信號幅度是輸入電流隨時 間的積分,輸出信號幅度與傳感器輸出的電荷量成正比。電流型放大器通過對輸 入電流信號的放大。由于硅光電池輸出的短路電流信號跟光照強度成線性關系, 所以本文中采用電流型放大器放大光信號。 硅光電池可以工作兩種工作模式:零偏置電壓模式(光電壓模式),反偏置 電壓模式(光電導模式)[36-38]。如圖3.12所示: 
圖3.12(a)光伏模式(b)光導模式 光電壓模式下,硅光電池處于零偏壓狀態,不存在暗電流影響,擁有較低的 噪聲,而且線性度高。光電導模式下,硅光電池需要外加偏置電壓,光導模式具有高的開關速度,但是即使沒有光照的條件下,也會存在暗電流,以及非線性、 較高的噪聲,所以光照強度測量采用光電壓模式[39]。根據3.1節中關于硅光電池特性分析,光電壓模式下,硅光電池處于零偏壓狀態,輸出短路電流信號跟光照強度成線性關系,通過放大硅光電池輸出電流信號來測量光照強度[40]。 3.2.2自動量程轉換 從夜晚環境下到強太陽光下,照度值顯著變化,由于照度跟輸出電流成線性 關系,因此硅光電池輸出電流跨度大,在幾個數量級間變化,采用單量程顯然不 能滿足實際測量要求。通過在前置運放加入開關控制量程變化[43],常用的開關 主要有電磁繼電器+光耦隔離、模擬開關、光MOS繼電器,手動開關等。電磁 繼電器+光耦隔離容易受外界環境影響,光電MOS繼電器漏電流比較大,價格 比較貴,手動開關需要人來操作,不能實現光照度自動測量。隨著集成化程度的 提高,在小信號領域模擬開關應用越來越廣泛,與機械開關不同,模擬開關具有 體積小、耗電量小、切換速度快、工作可靠等優點。模擬開關的參數主要有導通電阻、漏電流、通道數、切換速度。模擬開關一般為多個通道的,通道數越多,寄生電容和漏電流就越大。當控制一個通道選通時,其他通道處于高阻狀態,會存在對漏電流對通道產生影響,所以在選擇模擬開關時,由于光電流信號比較微弱,當漏電流較大時,對測量光信號產生大的誤差,通過綜合各方面考慮,采用一款漏電流小的模擬開關MAX4602,減少漏電流對檢測電路的影響。 
圖3.15MAX4602芯片管腳分布圖圖3.16自動量程轉換示意圖 MAX4602模擬開關是MAXIM公司推出的四通道模擬開關[44],該芯片一共 有16個管腳,管腳分布如圖3.15所示,其中有四個為數字控制端INl、IN2、IN3、IN4;八個模擬輸入、輸出端COM、NO;還有電源端和地。MAX4602最大導通電阻為2.5Ω,漏電流典型值僅0.2nA。MAX4602有兩種供電模式:雙電源供電和單電源供電。雙電源供電要求V+取+15V電壓,V-接-15V電壓,VL接+5V。單電源+12V供電模式要求V+取+12V電壓,V-接地,VL接+5V電壓。在雙電源模式中,MAX4602導通時泄露電流典型值為0.2nA 。在單電源+12V供電模式中,MAX4602導通時泄露電流典型值僅只有0.01nA 。在單電源模式供電中,+5V的電壓在系統中單片機模塊中能夠提供,所以另外只需要提供+12V的。電壓就能夠使MAX4602工作,所以可以減少設計的復雜性,而且工作在單電源模式下,導通泄流電流更低,使得檢測系統外部干擾更少,測量更為準確。MAX4602主要應用于音頻信號切換、航空電子、通信系統、測試設備等。通過單片機AT89S52控制模擬開關四個數字控制端口,通過光照強度測量值自動切換量程,四個電阻值分別問10Ω、100Ω、1KΩ、10KΩ。切換量程圖如3.16所示,通過單片機實現自動測量[45]。 3.2.3二級放大電路 通過前置放大電路和自動量程轉換電路組合,放大光電流信號。前置放大電 路輸出的電壓信號經過二級放大電路,最終放大的合適的電壓值。二級放大電路 采用OP07放大芯片,OP07是一種低功耗,非斬波穩零的運算放大器,具有非 常低的失調電壓(最大為150uV),低失調電壓漂移(0.5uV/°C),低低偏置電流(2nA)等特點。OP07為8管腳的DIP封裝,一般采用雙電源供電,同時也可以采用單電源。OP07同時具有低的輸入偏置電流和高開環增益的特性得 OP07適用于高增益的測量設備和放大微弱信號等方面[46]。硅光電池輸出電流信號經過前置放大后輸出電壓信號,由于輸出電壓還是比較微弱,因此二級運放需要放大100倍。二級放大電路如圖3.18所示,采用T型反饋放大。 
圖3.18二級運算放大電路 3.2.4濾波電路 照度檢測系統中的光信號,經過運算放大后,傳感器、放大電路及外界環境 給檢測系統引入噪聲,在處理光信號噪聲時,根據光信號變化特點和傳感器頻率 特性,采用RC低通濾波電路,根據式3.9計算出選用合適的RC值得到截止頻率,濾除高頻噪聲,減小噪聲對系統的影響。 f=1/2πRC 3.3控制電路設計 3.3.1單片機系統電路 AT89S52是ATMEL公司推出的89C51的增強型產品,它是一個低功耗、高性能8位微控制器,片內含通用8位中央處理器和8k的Flash存儲單元,40引腳DIP封裝,總共有32個I/O口,2個全雙工串行通信口,3個可編程定時/計數器,5個中斷,片上Flash允許程序存儲器在系統可編程,兼容MCS-51指令系統以及80C51引腳分布,為許多嵌入式控制系統提供高靈性、高性價比的解決方案。 AT89S52主要性能特點有[47]: 兼容MCS-51單片機產品; 8K可編程Flash存儲單元; 32個可編程I/O口線; 1000次擦寫周期; 3個16位定時器/計數器; 8個中斷源; 空閑模式和掉電模式; 全雙工UART串行通道; 掉電后中斷可喚醒。 AT89S52一些引腳端口具有第二功能,P1.0、P1.1為定時器/計數器控制端口,P1.5、P1.6、P1.7分別對應于MOSI、MISO、SCK,P3.0、P3.1為串口通信口RXD、TXD,P3.2、P3.3為外部中斷口,P3.4、P3.5為定時器外部輸入端口,P3.6、P3.7為外部存儲器讀寫控制端口。豐富的第二功能端口,為嵌入式系統提供了更多的選擇。單片機的最小系統圖如3.19所示。 
圖3.19單片機最小系統 3.3.2復位電路 復位電路是單片機的初始化操作,主要功能是把單片機初始化為0000H,使單片機從0000H單元開始執行代碼。當系統運行中出現死鎖或者出現數據故障時,通過復位電路使系統恢復到初始狀態。RST復位時間要求是持續2個機器時鐘周期高電平使單片機復位。復位電路采用簡單的RC復位電路,控制RST端口,時間常數T=R*C。選取合適的電阻值R和電容值C,通常選取電容C為0.1μF,電阻R為10K,得到時間常數T為1ms,遠大于兩個機器時鐘周期。復位電路如3.20所示。 
圖3.20RC復位電路圖 3.3.3串口通信電路 RS-232是美國工業協會(EIA)與BELL等公司制定的一種串行物理接口標準, RS-232標準協議適用于數據傳輸速率在0~20Mbit/s范圍內的通信,已廣泛應用于數據終端設備DTE與計算機和數據通信設備DCE的接口標準。RS-232有9個引腳(DB-9)或是25個引腳(DB-25)兩種連接器。RS-232是通過正負電壓表示邏輯狀態,與TTL以高低電平表示邏輯狀態不同,為了能夠同PC機接口或終端的TTL器件連接,需要在RS-232與TTL電路之間進行電平和邏輯關系的變換,實現變換的方法可以采用分立元件,或者采用集成電路芯片。常用MAX232芯片,即可以完成TTL到RS-232雙向電平轉換[48]。 
圖3.21串口通信電路 MAX232是MAXIM公司推出的一款多通道RS-232驅動器/接收器,MAX232芯片內部有一個電壓變換器,可以把輸入的+5V電源電壓變換成RS-232輸出電平所需的±10V電壓。該芯片價格適中,硬件接口只需要幾個電容就能滿足要求,所以在照度檢測系統中采用MAX232芯片來實現串口通信。串口電路中采用三線制連接,一般采用DB-9連接器,只需要DB-9中的三個接線柱,即:DB-9第5腳連接地(GND)端;第2腳接發送端(RXD);第3腳接接收端(TXD)。應用電路圖如3.21所示。MAX232芯片的發送端( RXD)和單片機的P3.0口連接;接收端(TXD)和單片機的P3.1口連接[49]。 3.4A/D轉換電路設計 高精度的A/D轉換器能有效減少誤差,提高測量的準確性[50]。本文中A/D轉換器采用MAXIM公司生產的高速150ksps,高精度16位A/D轉換芯片MAX1134,內部集成了內部采樣/保持電路、輸入比例電路、時鐘和三個數字輸 出引腳。該芯片具有出色的動態特性、高速及低功耗性能成為工業過程控制,儀 表及便攜式設備提供選擇。MAX1134可接受0至±6V(雙極性)或者+6V(單極性)的模擬輸入信號,采用3.3V單電源供電。串行觸發輸出(SSTRB)可以直接與TMS320系列DSP進行通信,用戶還可以通過配置選擇內部時鐘或者外部時鐘進行A/D轉換。MAX1134具有內部校準電路用于修正非線性及失調誤差[51]。MAX1134管腳分布如圖3.22所示。 各個引腳描述: 引腳1REF:ADC參考電壓輸入端,連接2.048V外部基準到REF; 引腳2、4DDAV:模擬電源3.3V輸入端; 引腳3、19AGND:模擬地; 引腳5、14DGND:數字地; 引腳6SHDN:AD芯片停止控制端; 引腳7、8、9-P2、P1、P0:用戶可編程輸出控制端; 引腳10SSTRB:串行選通輸出端,內部時鐘模式下,當ADC開始一個轉換時,SSTRB為低電平,轉換結束為高電平。外部時鐘模式下,SSTRB為高電平脈沖,開始傳輸MSB,CS為高電平時,SSTRB為高阻態; 引腳11DOUT:串行數據輸出端; 引腳12RST:復位控制端; 引腳13SCLK:數字時鐘輸入端; 引腳15DDDV:數字電源,接3.3V電源; 引腳16DIN:串行數據輸入端; 引腳17CS:片選端; 引腳18CREF:旁路緩沖基準; 引腳20AIN:模擬輸入端。 
圖3.22MAX1134管腳分布圖 3.5顯示電路設計 由于該系統只是LED路燈光學性質檢測的一部分內容,只對照度測量進行研究,所以顯示電路只用來顯示照度值,采用段式液晶能夠很好實現,而且讀數方便,功耗低。段式液晶采用HT1621芯片驅動。 HT1621是128點、內存映像和多功能的LCD驅動芯片,HT1621的軟件配置特性使它適合于多種LCD場合。HT1621與控制器連接的管腳只有4或者5條,使用方便。另外HT1621還具有降低功耗的指令。 HT1621的常用基本特性[52]: 工作電壓在2.4~5.2V之間; 內嵌256KHz的RC振蕩器; 可外接32KHz或256KHz頻率源輸入; 可選1/2或1/3偏壓和1/2、1/3或1/4的占空比; 節電命令可用于減少功耗; 內嵌時基發生器和看門狗定時器WDT; 一個32*4的LCD驅動器; 一個內嵌的32*4位顯示RAM內存; 四線串行接口; 片內LCD驅動頻率源; 數據模式和命令模式指令; 三種數據訪問模式; 提供VLCD管腳用于調整LCD操作電壓。 3.6電源模塊設計 光照強度測量系統中采用了多個模塊,芯片之間供電電壓不盡同,在對運放 供電電壓時,盡可能的減少紋波電壓對運放的擾動,所以電源的設計關系到整個系統的穩定和功耗[53]。 單片機、LCD顯示模塊采用的是+5V的供電電壓,運放放大器ICL7650 要求為雙電源供電5V,模擬開關MAX4602供電電壓為+12V、+5V供電,A/D 轉換MAX1134為+3.3V供電。不同模塊對電源要求不同,有時候要區分數字電源和模擬電源,所以在設計電源模塊時,需要處理好電源之間的關系以及電路布局。 系統采用+12V電源供電,接通電源開關后,系統輸入電壓為+12V,在圖3.23中,將+12V輸入轉為+5V,提供給單片機模塊供電,再將+5V電壓通過穩壓芯片的得到+3.3V的電源部分。+5V電壓采用普通的穩壓芯片LM7805,外圍器件很少,而且內部還具有過流、過熱的保護電路,使用方便、可靠,而且價格便宜。+3.3V電壓通過AMS1117穩壓芯片得到的+3.3V電壓用來給A/D芯片提供電源。A/D轉換芯片需要外部基準電壓,采用LT1790基準電壓芯片。LT1790是LinearTechnology推出的微功率、低壓差基準電壓芯片,通過該芯片得到+2.048V基準電壓。電路圖如3.24所示。 
圖3.235V-3.3V電源電路 采用ICL7650斬波穩流運算放大器,需要提供5V的電源,一般而言對于正電壓比較容易得到,負電壓可以通過兩種方法得到: 1.采用輸出正負電壓的變壓器,然后通過穩壓得到-5V電壓。 2.采用電壓泵—反轉電源轉換器,方便的從+5V的電壓轉換到-5V的電壓。 ICL7660是MAXIM公司推出的反轉電源轉換器芯片。ICL7660的靜態電流典型值僅為170uA,輸入電壓范圍為1.5~10V,工作頻率為10kHz,只需要采用 幾個外圍電容就能夠得到,使用方便。主要用于手持式儀表,數據采集,運算放大電路中。ICL7660應用電路如圖3.25所示。 
圖3.24LT1790應用電路圖3.25ICL7660應用電路 3.7小結 從傳感器的描述及其功能特性介紹,分析出運算放大器的要求,根據光照度檢測系統設計目標要求,分析各個模塊工作原理。硬件電路為系統提供了良好的保障。 4.LED路燈照度檢測軟件設計 自動控制系統中,硬件部分是實現系統的基礎,而軟件部分作為系統的靈 魂。只有當軟件和硬件相結合時,系統才能實現其價值和意義。第三章分析了 LED路燈照度檢測系統硬件電路設計,介紹了各個模塊的工作原理,本章主要 描述照度檢測系統軟件部分。 LED路燈照度檢測軟件部分由單片機控制、A/D 轉換編程、串口通信編程、液晶顯示編程組成。檢測系統軟件部分流程框圖如 4.1所示。 
圖4.1照度檢測系統軟件框圖 4.1單片機軟件編程 4.1.1單片機軟件設置 根據設計方案要求選用AT89S52單片機作為系統的控制芯片,起到調節各個模塊工作運轉的作用。AT89S52單片機的軟件配置介紹如下:AT89S52單片機有6個中斷源:2個外部中斷源、3個定時器中斷和1個串口中斷。INT0/INT1:外部中斷0/1,由P3.2/P3.3端口引入,低電平或下降沿有效;T0/T1/T2:定時器/計數器0/1/2中斷,由T0計數器計算滿后回零觸發;TI/RI:串口中斷,串口發送/接受一幀字符后觸發。AT89S52單片機6個中斷的軟件基本配置有:中斷允許寄存器,中斷源優先級寄存器,串行口控制寄存器[54]。 中斷允許寄存器IE: 中斷允許寄存器用來設定各個中斷源的打開和關閉,IE在特殊的功能寄存器中,字節地址為A8H,位地址分別是A8H~AFH,IE寄存器可以對每一位單獨進行位尋址。單片機復位時IE全部被清0。 表4.1中斷允許寄存器IE 
EA:中斷總允許控制位。EA=1,各中斷開放,由各自中斷控制位設定 ES:串行口中斷控制位,高電平(1)允許中斷。 ET2/ET1/ET0:定時器中斷允許控制位。 EX1/EX0:外中斷1中斷控制位。 中斷源優先級寄存器IP; 中斷源優先級寄存器在特殊功能寄存器中,字節地址為B8H,位地址分別是B8H~BFH,IP用來設定中斷源的優先級排列順序。默認條件下,優先級由高到底排列為外部中斷0、定時器0、外中斷1、定時器1、定時器2和串口中斷。 表4.2中斷源優先級寄存器IP 
串行口控制寄存器:用于串行口中斷及控制。 AT89S52單片機有三個16位定時器/計數器,在LED路燈照度檢測系統中用來控制程序延時、等時間采樣、波特率等。定時器/計數器描述如下:定時器/計數器工作方式寄存器TMOD:寄存器TMOD字節地址為89H,用來確定定時器的工作方式及功能選擇,單片機復位時,TMOD全部被清0,定義如表4.3所示。 表4.3定時器/計數器工作方式寄存器TMOD 
TMOD分為兩部分,高4位用于設置定時器1,低4位用于設置定時器0 GATE:門控制位。C/T:定時器模式和計數器模式選擇位。M1M:工作方式選擇位。 定時器/計數器控制寄存器TCON: 表4.4定時器/計數器控制寄存器TCON 
寄存器TCON字節地址為88H,位地址分別為88H~8FH,可進行位尋址。TCON寄存器用來控制定時器的啟動、停止,標志定時器的溢出和中斷況。 復位時全部清0。各位定義如表4.4所示。 TF1/TF0:定時器溢出標志位。 TR1/TR0:定時器運行控制位。 IE1/IE0:外部中斷請求標志。 IT1/IT0:尾部中斷觸發方式選擇位。 IT1/IT0=0時,為電平觸發方式。IT1/IT0=1,為跳變沿觸發方式。 定時器/計數器中斷2是不同于AT89C51單片機,定時器/計數器中斷2是AT89S52特有的。 定時器/計數器中斷2控制寄存器T2CON: 寄存器T2CON字節地址為C8H,T2CON寄存器用來控制定時器的啟動、停止,標志定時器的溢出和中斷情況。復位時全部清0。各位定義如表4.5所示。 表4.5定時器/計數器2控制寄存器T2CON 
TF2:定時器2溢出標志位。軟件清0。RCLK=0或者TCLK=1時,TF2不用置位。 EXF2:定時器2外部標志位。EXEN2=1時,T2EX上的負跳變出現重載或捕捉時,EXF2被硬件置位。定時器2打開,EXF2=1時, RCLK:串口接收數據時鐘標志位。RCLK=1,串口將使用定時器2溢出脈沖作為串口工作模式1和3的接收時鐘;RCLK=0,使用定時器1溢出脈沖作為串口接收時鐘。 TCLK:串口發送數據時鐘標志位。TCLK=1,串口將使用定時器2溢出脈沖作為串口工作模式1和3的發送時鐘;TCLK=0,使用定時器1溢出脈沖作為串口發送時鐘。 EXEN2:定時器2外部允許標志位。 TR2:開始/停止控制定時器2。TR2=1,定時器2開始工作。 C/T2:定時器2定時/計數選擇標志位。 C/T2=0,定時;C/T2=1,計數。 CP/RL2:捕捉/重載選擇標志位。 控制寄存器T2MOD 寄存器T2MOD字節地址為C9H,用來確定定時器的工作方式及功能選擇,單片機復位時,T2MOD全部被清0。各位定義如表4.6所示。 表4.6定時器/計數器2控制寄存器T2MOD 
T2OE:定時器2輸出允許位。 DCEN:置1后,定時器2配置成向上/向下計數器。 系統掉電和空閑模式: 當系統在一段時間內沒有工作時,系統通過軟件方式進入掉電模式。單片機掉電標志位POF位于寄存器PCON第四位,上電期間POF置位高電平“1”。在 空閑工作模式下,單片機處于睡眠狀態;掉電模式下,晶振停止工作。恢復掉電和空閑模式有兩種方式,硬件復位和外部中斷激活系統。 4.1.2單片機編譯調試環境 單片機編譯調試環境選擇常用的KeilC51編譯軟件。KeilC51是KeilSoftware公司推出的51系列兼容單片機C語言的軟件開發系統,和匯編語言相比較,C語言在可讀性、結構、功能和可維護性有明顯的優勢。Keil提供了包括C編譯器、連接器、宏匯編、庫文件管理和軟硬件仿真調試器等完整的開發方案,通過集成開發環境將這些部件組成一起。其強大的集成環境、強大的軟件仿真調試功能使得Keil應用非常廣泛。 4.2A/D轉換軟件設計 MAX1134是16位高分辨率,使用3.3V單電源供電,雙極性模式下轉換速度達到150ksps,無丟失碼,出色的動態特性(THD≥90dB),低功耗的A/D轉換芯片。由于AT89S52不具備SPI口功能,所以MAX1134與單片機間的通信通過I/O口模擬SPI接口來完成。 表4.7MAX1134控制字節格式 
MAX1134通過時鐘控制字節從串行數據輸入端輸入到內部移化寄存器,設置A/D轉換器模式。軟件配置功能描述如表4.7所示,當CS變低,每一個上升沿時鐘信號SCLK從串行數據輸入端DIN發送一比特數據,從最高位(MSB)開始發送,8個時鐘周期完成對MAX1134的軟件配置。如果中間發生配置中斷或者為完成8個時鐘設置,MAX1134均不能完成正常的模數轉換。MAX1134可用外部時鐘或者內部時鐘完成A/D轉換,但是兩種模式下均使用外部時鐘將數據移入或移出。一般要求完成一次轉換的周期是8個時鐘信號SCLK的整數倍。MAX1134具有短采集模式(24SCLK)和長采集模式(32SCLK)兩種工作模式。采用單極性輸入時,輸出二進制數;采用雙極性輸入時,輸出的是二進制補碼。 
圖4.2A/D轉換流程圖 
圖4.3外部時鐘短采集模式時序圖 在本系統中選用MAX1134單極性模式0~6V電壓輸入、外部時鐘、短采集模式(24SCLK)的工作方式。轉換開始前,CS為從高電平變為低電平,表示MAX1134芯片選通,開始工作。初始化設置:DIN、SSTRB、DOUT、SCLK都設置為低電平。當SCLK第一個上升沿到來時,DIN開始發送配置數據給MAX1134,通過8個時鐘的數據字節發送,完成對MAX1134的設置,A/D轉換器模數轉換開始工作。在第7個SCLK時鐘下降沿處觸發SSTRB,使SSTRB上升為高電平。第8個SCLK下降沿,SSTRB拉低,數字輸出開始有效,輸出從最高位MSB開始。再經過16個SCLK時鐘完成模擬信號到數字信號的轉換。經過24個時鐘周期,完成一次A/D轉換,隨即CS拉為高電平。隨即可以進入下一個轉換周期。外部時鐘采集模式時序圖如4.3所示。MAX1134軟件讀寫實現代碼: - /************寫數據************/
- voidwrite_1134()
- {
- unsignedchari,d;
- DOUT=0;
- ADCS=0;
- d=0XE4;//
- for(i=0;i<8;i++)
- {
- SCLK=0;
- DIN=(bit)(d&0x80);
- SCLK=1;
- d<<=1;
- }
- SCLK=0;
- ADCS=1;
- SSTRB=0;
- SSTRB=1;
- ADCS=0;
- }
- /************讀數據************/
- unsignedintread_1134()//讀一次A/D轉換
- {
- unsignedintmax1134_data=0,a=0;
- unsignedcharl=0,i=0,m=0;
- for(i=0;i<8;i++)//讀高八位
- {
- m<<=1;
- SCLK=1;
- m|=DOUT;
- SCLK=0;
- }
- for(i=0;i<8;i++)//讀低八位
- {
- l<<=1;
- SCLK=1;
- l|=DOUT;
- SCLK=0;
- }
- max1134_data=(unsignedint)m*256+(unsignedint)l;//合并高八位和
- 低八位數,轉
- //換成十進制數
-
- ADCS=1;
- returnmax1134_data;//返回A/D值
- }
在本系統中,微弱光照條件下,量程采用最高檔位,放大倍數能達到10M倍,經過運算放大器輸出后,輸出電壓含有大量50Hz工頻信號。濾除50Hz工頻信號可以采用陷波器,但是在光測量中,硅光電池采集到的光信號可能含有50Hz信號,因此不能直接采用陷波器。本文中采用軟件方法(等周期采樣)實現光照強度的準確測量。50Hz工頻噪聲如圖4.4所示。 
圖4.450Hz噪聲信號 不考慮噪聲的變化為標準的正弦波。通過調節零電位使波谷的電壓為正電壓,在等周期內采樣。 T=1/f 由于f=50Hz,得到T=0.02s。根據在一個周期內盡可能多的采樣原則,T內采64個點,即在3.125ms內進行一次A/D轉換,將周期內得到的64個轉換值取平均后,即可得到電壓值。 4.3量程轉換軟件實現 LED路燈照度測量系統在測量過程中,光照強度從微弱到高照度,量程范圍要求大,能從單位勒克斯到千勒克斯,所以在自動測量過程中需要實現自動量程轉換功能。本文中采用的MAX4602模擬開光,通過單片機四個I/O通信口,實現自動量程轉換。MAX4602四個數字邏輯輸入端口IN1、IN2、IN3和IN4分別放大倍數為1K、10K、100K、1M。模擬開關起始狀態為四個導通的開關默認端口為高電平。在單片機初始化模擬開關時,設置最高量程開關導通,為高電平,即IN4=1,其余三個數字邏輯輸入端為低電平。vaule=Get_number();//讀取A/D轉換值讀取一次A/D轉換值,判斷vaule的大小,當vaule大于40000時,關閉該通道(IN4=0),同時打開小于一檔的開關(IN3=0)。再讀取一次A/D轉換值,判斷vaule值,循環轉換量程,直到找到合適的檔位。 
圖4.5自動量程轉換流程圖 4.4液晶顯示軟件實現 LED路燈照度檢測系統顯示模塊采用段式液晶顯示,使用用HT1621B驅動段式液晶工作。HT1621B驅動芯片為48引腳SSOP封裝,4條控制線CS、RD 、WR和DATA。管腳CS設置為高電平1時,單片機和HT1621B之間的數據和命令無效。在產生命令模式或者轉換模式之前,要用一個高電平脈沖初始化 HT1621B的串行接口。管腳DATA是串行數據輸入/輸出管腳,讀或寫數據通過管腳DATA進行。管腳RD是讀時鐘輸入管腳,在RD信號的下降沿時,數據輸出管腳DATA上,在RD信號上升沿和下一個下降沿之間,單片機應讀取相應的數據。管腳WR是寫時鐘輸入管腳,在WR信號上升沿時,管腳DATA 上的數據、地址和命令被寫入HT1621B。可選的管腳IRQ可用作主控制器和HT1621B之間的接口,IRQ可用軟件設置作為定時器輸出或WDT溢出標志輸出。HT1621B的靜態顯示內存以32×4位的格式存儲要顯示的數據,靜態示內存的數據直接映像到段式液晶驅動器中。靜態顯示內存(RAM)映像圖如4.6所示。 
圖4.6ROM映像圖 HT1621B有兩種工作模式:命令模式和數據模式。命令模式ID為110,命令模式包括系統配置命令、系統頻率選擇命令、LCD配置命令、時鐘/WDT設置命令和操作命令等。數據模式包括WRITE、READ和READ-MODIFY-WRITE操作。讀寫操作時序圖如4.7、4.8所示。 
圖4.7讀連續時序圖 
圖4.8寫連續時序圖 4.5串口通信軟件 串口通信是以二進制數發送的通信方式,由于所需傳輸線少,廣泛用于單片 機與PC機之間的通信。按照串口通信的數據的發送方式分為同步串口通信和異步串口通信。本文采用的是基于異步串口通信方式[55]在異步通信中,波特率和字符幀格式是串口通信的兩個重要指標,用戶根據實際情況選定。 1.波特率(BaudRate) 波特率定義為單位時間內傳送二進制碼位數,單位為bit/s。波特率用于表征數據傳輸的速度。波特率越高,數據傳輸速度越快。 2.字符幀(CharacterFrame) 字符幀由起始位、數據位、奇偶校驗位和停止位四部分構成: 起始位:占一位,位于字符幀開頭位置,為低電平(邏輯0),用于表示開始發送一幀數據信息。 數據位:可以取5~8位,緊跟起始位之后,低位在前高位在后。 奇偶校驗位:占一位,位于數據位后,表征通信采用奇校驗還是偶校驗。 停止位:通常可取1、1.5或2位,位于字符幀末尾,為高電平(邏輯1)表示一幀數據信息發送完畢,也可為下一幀數據發送做準備。串口通信工作之前要初始化串口,配置串口控制寄存器、電源管理寄存器、工作方式等。串口通信主要用于LED路燈照度檢測系統的校準、測試部分,也可以通過串口通信實現照度測量儀與PC機的數據交換。在校準、測試階段,照度測量系統上采用的是四位段式液晶,16位A/D輸出的是0~65535之間的五位數,通過串口通信將數據發送到計算機端,方便實現數據的讀取與存儲。可以分析串口通信計算機端得到的數據,而不用讀取段式液晶上顯示的數據,便與記錄和統計。串口發送是以位或者字符的形式發送的。A/D轉換完成后,得到一個五位數,將五位數轉換成單個字符,一次發送一個字符,先發送最高位字符,SBUF寄存器中發送的是ASCII碼,ASCII+48得到數字字符,等待發送中斷信號(TI),如果發送完畢TI置為1,跳出循環等待,TI中斷軟件置0,在串口通信終端顯示最高位。連續發送五次,得到一個沒有校準的照度值,得到一個數據后,發送一個空格表示一次發送完成。 串口通信實現代碼: - for(i=0;i<5;i++)//循環五次,發送五位字符
- {
- SBUF=zhaodu[i]+48;//ASCII碼轉換成字符
- while(!TI);//判斷是否發送完成
- TI=0;
- }
- SBUF=0X20;//發送空格
- while(!TI);
- TI=0;
4.6光照強度標定軟件實現 LED路燈照度檢測系統作為儀器儀表,在沒有標定的時,不能用于測量,只有按照儀器儀表標準,通過儀器儀表技術要求,才能用于測量。所以,當LED 路燈照度檢測系統沒有標定的前提下,系統還不能正常工作。 
圖4.9光軌示意圖 照度測量系統標定要求[56]: 標定裝置要求:光度標定裝置由光軌、滑動小車、光闌、燈架和燈絲調整儀 組成。光軌長度為6m,光軌平直性的誤差不超過±1mm,平直性良好,測距米尺1m內的誤差不大于0.2mm照度檢測標定環境要求:要在暗環境下進行校準,環境溫度應保持在(20±5°C),空間濕度小于85%RH,標準燈參考國家發光照明委員會CIE的要求,采用色溫為2856K標準光源。 
圖4.10照度標定用光軌 把照度測量用的傳感器和標準燈安放在光軌上,調整標準燈燈絲面和光傳感器的 測試平面,使兩個平面和光軌的水平測量軸線垂直,并且中心點位于軸線上。要求標準燈的燈絲平面與光傳感器間的距離至少大于光傳感器測試面最大限度的15倍以上[57-58]。在光傳感器和標準燈之間放置幾個光闌(孔徑大小合適),不允許擋住由標準燈燈絲和燈殼發出的光照射到光傳感器測試面上。設置光闌主要是防止雜散光進入到光傳感器中,影響標定結果。標定用光軌示意圖如圖4.9所示。圖4.10為暗室現場圖。固定光傳感器位置,揭開光傳感器蓋子,調節測試平面與標準燈面平行,改變標準燈與光傳感器之間的距離,光傳感器在多個位置得到不同的照度值,根據光照度平方反比定律 E=I/r^2(4.2) 式中:E:測試面的標準照度值,單位為lx; I:標準燈的發光強度,單位為cd; r:標準燈的燈絲平面到光探頭測試面的距離,單位為m。 改變燈絲平面與光傳感器間距離,根據距離平方反比定律,多次重復測量結果,經最小二乘法線性擬合,得到所需定標校正照度值。 4.7小結 結合LED路燈照度檢測硬件電路,設計系統工作軟件,包括控制部分,信號采集部分,顯示部分的設計,使照度檢測系統正常穩定運行。 5.系統噪聲分析及處理 5.1系統內部噪聲及處理 5.1.1電阻熱噪聲 電阻或者導體在不加信號源或電動勢的前提下,而且兩端也沒有電流流過,如果將電阻接到放大器后,用示波器觀察發現,兩端會出現噪聲電壓起伏變化,這種噪聲稱之為電阻熱噪聲[59]。電阻熱噪聲起源于電阻或者導體內部電子的隨機自由運動,導致電阻或導體兩端電荷的短暫堆積,形成噪聲電壓。噪聲電壓是自由電子運動產生的,當溫度升高后,電子運動加劇,因此噪聲電壓隨溫度上升而變大。從統計學角度分析熱噪聲,噪聲電壓服從高斯分布曲線。 5.1.2工頻噪聲 在以交流電源供電的系統中,普遍存在工頻噪聲。工頻噪聲通過各種方式進入到測量系統中,與被測量信號疊加在一起,使測量值出現偏移,直接影響到測量準確度,有時甚至造成不能直接測量,因此在對微弱光信號測量的影響尤為顯著。 常見的工頻干擾源:大電流工頻線引起的工頻磁場;高壓工頻線引起的工頻電場;實際工頻線引起的工頻電磁場;工頻地電流;電源變壓器引起的工頻磁場;電源變壓器引起的容性泄漏;軟起動器、變頻器等調速、變流裝置產生的諧波干擾等等。由此可見,工頻噪聲的影響是廣泛存在的[60]。由于不存在絕對的絕緣材料,所以工頻噪聲電壓能通過泄漏電阻滲入測量系統中。 通常抑制工頻噪聲的方法有正確的接地方法、良好的屏蔽、設置保護環、采用高共模抑制比CMRR的運放放大電路和窄帶濾波器或陷波器。在多數時候,即使采用了抑制工頻噪聲的措施,并不能徹底消除工頻噪聲干擾。另外,工頻噪聲中還存在諧波噪聲信號,而且諧波噪聲的頻率高,即使噪聲分量很小,通過電磁耦合和分布電容進入檢測系統的分量較大。因此,只有采用合理的微弱光信號檢測技術才能有效地消除和抑制工頻噪聲。 5.1.31/f噪聲 1/f噪聲是由于兩種導體間相互接觸點的電導隨機漲落而引起的,導體間接觸不理想的器件都存在1/f噪聲,因此1/f噪聲又稱為接觸噪聲[61]。約翰遜與1925年首次發現1/f噪聲,隨后的幾十年,1/f噪聲抑制是國際物理機理研究的熱點,分別提出了遷移漲落模型、表面載流子數漲落模型和量子1/f噪聲理論。 5.1.4散彈噪聲和爆裂噪聲 散彈噪聲又可以稱之為散粒噪聲,與越過勢壘的電流相關。電子或空穴的隨機發射運動導致流過勢壘的電流在其平均值附近隨機起伏,從而引起散彈噪聲出現。在半導體器件中,越過PN結的載流子的隨機擴散運動以及電子空穴對的隨機產生和復合過程導致產生散彈噪聲。 當流過PN結的平均直流電流為100mA時,設測量帶寬為10kHz,則PN結產生的散彈噪聲電流有效值為17.9nA,在測量微弱光照條件下的光照強度時,傳感器輸出電路信號甚至小于散彈噪聲電流有效值,要準確測量光照強度,需要減小PN結散彈噪聲信號,一般情況下的做法是減小測量帶寬和減小平均直流電流。爆裂噪聲是流過半導體PN結電流的突然變化而引起的。爆裂噪聲的引起的原因是半導體中的雜質能隨機發射或捕獲載流子。通常爆裂噪聲由一系列寬度不同,而幅度基本相同的隨機電流脈沖組成,脈沖寬度一般為微秒到秒級別,脈沖幅度為1nA~0.001uA,頻率小于幾百赫茲。如果將爆裂噪聲放大并送到揚聲器中,可聽到類似于爆米花的聲音。散彈噪聲和爆裂噪聲同屬于電流型噪聲,在光照強度測量系統中,光傳感器輸出的是電流信號,放大方式采用的I/V 放大,因此在設計過程中應盡可能減小電路中相關電阻阻值,同時采用濾波措施。 5.1.5地噪聲 光照強度測量系統工作時必然存在工作電流,由于測量系統的復雜性,地線回路難以做到盡可能的短,另外PCB板面積空間的約束,地線回路的寬度難以做到足夠寬,因此地線回路就存在一定的阻抗,電流流過地線,地線上會產生壓降。當測量系統的工作頻率較高或者存在頻率較高的數字電路,地線上除了直流壓降外,還會引起交流噪聲。數字電路產生的地線噪聲是很不容忽視,地噪聲不但與其工作頻率有關,還與開關速度密切相關。當一條長度為2cm寬為6mm的地線的,電感約為10nH,流過電流為10mA,頻率為1MHz正弦波電流的地線壓降為1mV,而如果一個數字集成電路的上升或下降沿時間為10nS,電流為10mA,那么該地線上產生的峰值噪聲電壓可以達到16mV。地線除了存在分布 電感和直流電阻引起地線壓降外,頻率較高時,還存在趨膚效應引起的阻值變化, 同樣會產生地線噪聲。測量系統除了存在數字電路引起的地線噪聲外,還存在調 制引起的信號幅度的變化導致的模擬放大電路工作電流的變化產生的地線噪聲。 另外,電源電壓本身的紋波噪聲也會引起工作電流的變化,從而產生地線噪聲。 由此可見,地線噪聲對微弱光信號的檢測有著不可忽視的影響。 5.2運算放大器的噪聲 微弱光信號檢測的目的是從噪聲中恢復被檢測光信號。為了能把微弱光信號 放大到可以感知的水平,需要采用放大電路,但是在放大光信號的同時也將噪聲 放大,而且放大器本身還會產生額外的噪聲,因此在設計放大電路時,要選擇合 理的放大電路,還要考慮放大器芯片的選擇。運算放大器引起的噪聲主要由輸入失調電壓和輸入偏置電流組成。噪聲模型如圖5.2所示,I+、I-為運放輸入端偏置電流,VOS為輸入偏置電壓。 
圖5.2運算放大器噪聲模型 5.2.1輸入失調電壓 在理想狀況下,當輸入運放的兩個輸入端的電壓相同時,輸出電壓應該為0V,在實際情況下,必須在兩個輸入施加一個小電壓才能使輸出電壓為0V,這樣的 微小電壓稱為失調電壓VOS輸入失調電壓可以看作一個串聯在運算放大器反相輸入端得電壓源VOS,對應輸出失調電壓等于輸入失調電壓乘以直流噪聲增益。本文中采用ICL7650運放芯片,失調電壓OSV只有0.6uV,有效的減少失調電壓對于光照強度測量的影響。 5.2.2輸入偏置電流 理想條件下,流入運放輸入端得電流為零,但是實際上,運放的兩個輸入端都有電流輸入,分別BI+和BI−。當反饋電阻足夠大時,會產生比較大的誤差。例如BI為10nA,反饋電阻R為1MΩ,那么有10mV的電壓誤差。采用ICL7650運放,輸入偏置電流只有50pA,當前級放大電路為最大量程100KΩ時,電壓僅5uV,極大的提高了測量的準確性。 5.3PCB布線處理 繪制光檢測系統PCB時,要考慮PCB尺寸大小。PCB尺寸過大時,導線長, 阻抗增加,抗噪聲能力降低,成本增加;尺寸過小,則散熱不好,而且鄰近線條 易受干擾。根據系統各個功能模塊,對檢測系統進行布局。LED路燈光照強度的測量系統中,有微弱信號采集電路、數字處理電路和電源電路,電路之間的布局各不相同,之間產生的干擾和抑制方法不相同。因此要將數字處理電路、微弱信號采集電路和電源電路分別分開放置,布局中還要特別注意強、弱信號的傳輸方向性問題。相同模塊電路的器件應盡量靠近放置,這樣可以獲得良好的抑制噪聲的效果。PCB布線原則之一就是各器件間的引線要盡量短,微弱信號采集電路和數字電路合理的分開,使相互間的信號耦合最小。光信號采集模塊中輸入的光電流信號非常的小,在PCB布線處理時,放大芯片ICL7650的輸入引腳采用隔離島,將輸入引腳抬起來,不和PCB連接,直接將光傳感器的輸出引線接到懸空的隔離島上,反饋電阻和反饋電容回路的端連接到隔離島。由于漏電流的不確定性,即使PCB板阻抗很高,輸入端的電位差也不能忽略。前置運算放大電路對于電源的要求也很高,微小的電壓波動會引起測量誤差,所以在靠近運放的供電電壓加0.1uF、0.01uF的陶瓷電容,減弱電壓中的高頻噪聲。(1)電源模塊要求:穩壓輸入端接入100μF以上的電解電容,輸出端接同樣接 100μF以上的電解電容,并且加0.1uF陶瓷電容,電容布局時,盡量靠近輸入/輸出端。(2)A/D轉換電路PCB布線要求:保證數字信號線和模擬信號線相互分開,模擬信號線和數字信號線嚴禁平行布線,電源接地和旁路處理。(3)地線要求:系統板為單點接地,數字地和模擬地構成各自的通路,數字地和模擬地用零歐姆電阻連接,構成閉環回路。盡量加粗地線,若地線很細,接地電位隨電流的變化而變化,使設備信號不穩定,抗噪聲性能變壞。根據電路布局,地線回路從數字信號開始,到A/D轉換芯片,最后連接到運放地端,形成從強到弱的回路。PCB板覆銅,沒有用到的區域用一個大的接地面覆蓋,提供屏蔽盒增加電路去耦的能力,覆銅回路要求按照從強到弱原則。在前置運算放大電路PCB 板加屏蔽罩,減少外界電磁、工頻噪聲的影響。 5.4小結 分析了LED路燈照度檢測系統內部噪聲,運算放大器噪聲以及其他外部噪聲,并采取有效措施有效抑制噪聲,通過系統硬件PCB布線處理,提高系統抗干擾能力。 6.系統測試 6.1系統硬件電路測試 6.1.1模塊化測試 焊接電路時,先將電源部分焊接好,焊接時注意穩壓芯片不要反接,焊接要良好,用電壓表測試輸出電壓是否穩定,確保電源部分正常穩定。然后焊接貼片元器件和放大電路部分,最后焊接單片機電路。系統焊接完成后,用萬用表測量貼片封裝的芯片引腳是否有短接或沒有虛焊的引腳,然后仔細檢查PCB是否都焊接良好,檢查通過后,接上電源開關,給系統通電,用手看看穩壓芯片是否發燙,如果穩定良好,說明電路沒有短路。通過串口給單片機下載程序,控制LCD 顯示、控制模擬開關和A/D轉換測試。 6.1.2系統整體測試 系統硬件整體調試完成后,下載軟件代碼,系統開始運行工作,液晶顯示A/D轉換值,通過串口通信發送A/D數據到上位機,串口數據顯示如圖6.1所示,并對完成系統的校準工作,使系統檢測達到檢測標準要求。 
圖6.1串口接收端 系統校準后,測量光照強度,系統實物如圖6.2所示,當前照度測量顯示值為 11.10lx。 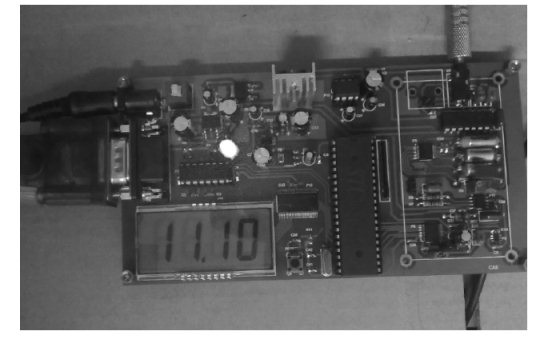 將系統放置在暗環境中,打開光源,等光源發光穩定后,開始測量光源光照 將系統放置在暗環境中,打開光源,等光源發光穩定后,開始測量光源光照
強度值,同一位置測量五次,并且用標準照度計在相同位置測量光源照度值。改 變光源強度或者改變光傳感器與光源之間的距離,光源穩定后,測量光源照度值, 重復多次得到表6.1。由表中可以看出,當光照強度越弱時,硅光電池輸出電流 信號越小,有效信號系統引入的噪聲信號影響越大。照度值在小于1lx時,系統測量誤差增大。在小于1lx照度條件下,檢測系統有待改善。在大于1lx光照條件下,系統的測量誤差小于±3%,達到國家照度計一級標準要求,重復性測量誤差小于±1%。 表6.1系統測量值 
6.2誤差分析及處理 在LED路燈照度檢測系統中,光傳感器、運算放大器、A/D轉換器等硬件電路都會受不同程度的各種因素影響,使光照度檢測的測定值與真實值之間造成差異。差異可歸結為兩類:隨機誤差和系統誤差。系統誤差是在同一條件下多次重復測量。誤差大小和符號保持不變,或按某一確定規律變化,是系統的固定誤差。 LED路燈照度檢測系統系統誤差來源主要有以下幾方面:1.硅光電池特性所造成的誤差;2.運算放大電路引起的誤差;3.A/D轉換器電路引起的誤差;4.外圍電路接口電路引入的非線性誤差。減小系統誤差的主要措施有:選用穩定性高、暗電流小、輸出線性度好的硅光電池;選用低泄露電流、低失調電壓的斬波穩零運算放大器;選用高精度、誤碼率低的A/D轉換器,采用高精度、溫漂系數低的反饋電阻,和聚丙烯反饋電容。部分系統誤差采用軟件補償的方法消除。 隨機誤差是系統隨機變化引起的誤差。在同條件下多次重復測量,誤差存在的不確定性的變化,但是隨機誤差服從統計規律,以相同條件測量時,根據時間平均和總體平均方法。隨機誤差之和為零,測量值的數學期望等于真實值。隨機誤差主要由供電電源波動、電路噪聲、外界環境引入等等造成的。減小隨機誤差的措施:PCB布線時,盡量減少阻抗干擾;系統采用屏蔽方式減少外界環境干擾;軟件采用A/D轉換多次采樣取平均的方法,減小隨機誤差。 6.3小結 主要分析系統模塊工作狀況,測試各個模塊運行性能,完成系統測試, 分析系統存在的誤差以及誤差處理方法。 7.總結與展望 本文通過分析國內外傳統光源光電檢測發展趨勢,以及傳統光源與LED光源光電檢測的區別,探討LED光電檢測的發展趨勢。針對目前LED路燈光學性質檢測的存在問題,提出了LED路燈光照強度測量系統方案,驗證了系統軟硬件設計,完成了照度自動測量系統的校準工作,使系統達到照度檢測要求。本文的主要的研究內容有:1.分析傳統光源光電檢測與LED光源檢測區別,LED光源檢測的發展趨勢。通過分析,本文中采用燈具旋轉式測量方法,通過旋轉LED 燈具,固定光傳感器的方法測量光學參數。2.對光傳感器的研究分析,并通過加濾光玻璃完成光傳感器的人眼視覺V(λ)光譜修正,確保檢測的準確性。選擇恰當的前置放大電路減少干擾、提高信噪比,設計二級放大電路、A/D轉換電路、顯示電路等,提供串口通信為LED路燈光學檢測提供良好的外部接口3.完成照度自動檢測系統的軟件設計,包括控制部分、A/D轉換和顯示部分代碼編寫工作,并校準照度測量系統。4.系統測試,檢驗系統工作的準確性和穩性。通過對系統噪聲的分析,采取有效措施減少噪聲的干擾。由于時間和人力的限制,只是完成了光照強度的測量,作為完整的LED路燈光學檢測系統,還有光通量、顏色指標特性等參數,以及LED路燈燈具旋轉臺的控制系統與各傳感器的結合未能實現。離實際應用有一段距離,還需要進一步完善,今后可以從其他參數測量模塊的設計,以及各個模塊集成為整體測量系統來開展研究。1.照度檢測系統改善。采用量程范圍更寬的采集系統,通過多個光傳感器準確測量微弱光照強度。在微弱光照條件下,可選用光電倍增管測量,普通光照條件下采用硅光電池,通過通道切換實現從極微弱到強光照條件下的精確測量。2.其他光學參量測量。光通量、相關色度等光度量的檢測模塊設計。由于LED路燈燈具的特性適宜采用分布式方法測量。3.LED路燈旋轉臺。該系統采用的是LED燈具旋轉,傳感器固定不變的方案,需要設計路燈燈具旋轉臺,通過電機上下、左右移動,實現燈具全空間內的測量。4.檢測系統各個模塊集成。光電檢測傳感器部分固定在檢測的一端,控制LED路燈燈具臺,旋轉燈具的同時發送坐標指令給系統,將每個坐標上采集到得數據存儲在上位機上,通過圖形界面顯示測量圖,并且可以通過鼠標點擊查看坐標點上的光學參數值,實現LED路燈光電檢測的自動測量。距離完整LED路燈光電測量系統還有很多工作要做,今后需要其他人來參與研究,實現其意義。
致謝這次畢業設計能取得圓滿的成功離不開我的指導老師劉偉老師的細心指導、,在此,我真心的感謝我的指導老師給予了我關鍵性的理論指導,讓我才能順利完成此次的畢業論文設計。同時我也感謝學校對本科教育的重視,使我學到了很多實用的知識和技能,在本次的設計中都得到了實踐。最后,還要感謝在我編寫論文期間給我提供過技術上和知識上幫助同學,沒有你們的幫助,我不可能完成此次論文,謝謝你們! 最后,還要感謝學院的各位領導。你們一直關心我們的健康成長,幫助我們形成健康的人生觀、世界觀、價值觀。還有輔導員曾振華老師,您總是在生活中的各個方面各個細節給我幫助,我還要感謝周口師范學院,在這里的四年了我不僅學到的是書本上的知識還有做人的道理。我只想說:母校,我愛你!
附錄 1 
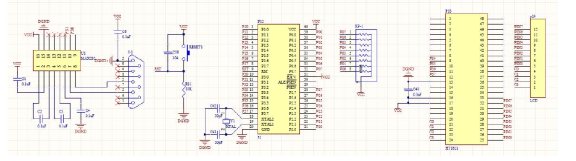
檢測系統電源模塊 單片機控制模塊 
光電流信號處理電路 附錄2 
LED 路燈照度檢測系統 PCB
完整的Word格式文檔51黑下載地址:
 lunwen.doc
(2.59 MB, 下載次數: 32)
lunwen.doc
(2.59 MB, 下載次數: 32)
2018-4-15 20:12 上傳
點擊文件名下載附件
下載積分: 黑幣 -5
| 








 QQ好友和群
QQ好友和群 QQ空間
QQ空間 騰訊微博
騰訊微博 騰訊朋友
騰訊朋友 收藏
收藏 淘帖
淘帖 頂
頂 踩
踩

