ϴ�C(j��)�ǬF(xi��n)����ͥ�бز����ٵ�һ���֣����ij��F(xi��n)�������҂���������҂���(ji��)ʡ�˲��ٕr(sh��)�g���S����(j��ng)��(j��)�İl(f��)չ����������ˮƽ�IJ�����ߣ���l(f��)չҲ�������®���ȫ�Ԅӻ��ij����ǬF(xi��n)��ϴ�C(j��)�Ļ���Ҫ���҂��F(xi��n)��ֻҪ��һ��(g��)�I���҂��Ϳ������ϴ�·������в�����ϴ�C(j��)��u����X���ܻ��l(f��)չ�����y(t��ng)�ęC(j��)еʽ�����ε����ʽ���ƶ��y�ԝM��F(xi��n)��ϴ�C(j��)�İl(f��)չҪ��ϵ�y(t��ng)������������STC89C52��Ƭ�C(j��)��ϵ�y(t��ng)��Ҫ��Һ���@ʾģ�K��ϵ�y(t��ng)��(b��o)��ģ�K��늙C(j��)����ģ�K�����ܰ��Iģ�K��ָʾ��ģ�K��ϴ�C(j��)�_�C(j��)Ĭ�J(r��n)��(bi��o)��(zh��n)ģʽ��ϴ��12��犣�Ưϴ6��犣�Ưϴ�ɴ�Óˮ��Ưϴ��ϴ�죬늙C(j��)�����D(zhu��n)���룬ͣ���룬���D(zhu��n)���룬ͣ���롣ϵ�y(t��ng)ͨ�^���I�톢ͣϴ�C(j��)��ͨ�^���I�x��ϴ�C(j��)��(bi��o)��(zh��n)�����٣�Óˮ���Nģʽ��ͨ�^���Iģ�MÓˮ���w���ܵȵȡ� ���O(sh��)Ӌ(j��)ϴ�µ��^�̿�����Ҫ������ϴ�죬Ưϴ����ˮÓˮ����(g��)�^�̡�����ȫ�Ԅ�ϴ�C(j��)�Ŀ���ϵ�y(t��ng)��Ҫ������c(di��n)�����M(j��n)�д_����Ƭ�C(j��)��ݔ��ݔ�������P(gu��n)ϵ������(j��)ϴ���^�̵������Ƴ�����O(sh��)Ӌ(j��)��Ҫ����������(n��i)�����r(sh��)�Д����(w��)�����ⲿ���r(sh��)�Д����ϴ�£���ˮ��Óˮ���O(sh��)Ӌ(j��)���O(sh��)Ӌ(j��)�ꮅ���M(j��n)��ϵ�y(t��ng)�{(di��o)ԇ�� 1.�w Փ 1.1 �n�}�о����������x 1.2������Ҫ���о���(n��i)�� 2ϵ�y(t��ng)�������w�O(sh��)Ӌ(j��) 2.1 ȫ�Ԅ�ϴ�C(j��)ָ��(bi��o)Ҫ�� 2.2 ϵ�y(t��ng)�����x�� 2.2.1 �������x�� 2.2.2 늙C(j��)�(q��)�����x�� 2.3 ϵ�y(t��ng)���w�O(sh��)Ӌ(j��) 3 ϵ�y(t��ng)Ӳ���·�O(sh��)Ӌ(j��) 3.1 늙C(j��)�(q��)���·�O(sh��)Ӌ(j��) 3.1.1 L298��B 3.1.2 늙C(j��)�(q��)���·�O(sh��)Ӌ(j��) 3.2 ��Ƭ�C(j��)���Ɔ�Ԫ�O(sh��)Ӌ(j��) 3.2.1��Ƭ�C(j��)��B 3.2.2 �Д�ϵ�y(t��ng) 3.2.3���r(sh��)�� 3.2.4����ϵ�y(t��ng)�·�O(sh��)Ӌ(j��) 3.3. �@ʾ�·�O(sh��)Ӌ(j��) 3.4 ��(b��o)���·�O(sh��)Ӌ(j��) 3.5ָʾ���·�O(sh��)Ӌ(j��) 3.6�I�P�·�O(sh��)Ӌ(j��) 3.7�Դ�·�O(sh��)Ӌ(j��) 4.ϵ�y(t��ng)ܛ���O(sh��)Ӌ(j��) 4.1 ܛ���_�l(f��)�h(hu��n)����B 4.2 C�Z�Խ�B 4.3 ܛ�����w�O(sh��)Ӌ(j��) 4.3.1ϵ�y(t��ng)�������O(sh��)Ӌ(j��) 4.3.2ϵ�y(t��ng)�Д�����O(sh��)Ӌ(j��) 4.3.3 �I�P������� 4.3.4 늙C(j��)�(q��)�ӳ����O(sh��)Ӌ(j��) 5.ϵ�y(t��ng)���漰�Y(ji��)������ 5.1 Ӳ����(sh��)�� 5.2ϵ�y(t��ng)����h(hu��n)����B 5.3 ϵ�y(t��ng)����Y(ji��)������ 5.4���������Ć��} �Y(ji��)���Z �����īI(xi��n) �� �x ��� ϵ�y(t��ng)�·�D ������a���
1.�w Փ�ڱ�������Ҫ��B���n�}�о��ı��������x���Լ�ϴ�C(j��)����ϵ�y(t��ng)��ʹ�ìF(xi��n)��Y(ji��)��һЩ��(sh��)�H�еĆ��}���U����ϴ�C(j��)����ϵ�y(t��ng)�O(sh��)Ӌ(j��)�ı�Ҫ�ԣ�����B��һ�±��O(sh��)Ӌ(j��)�ĵ�Ҫ��̓�(n��i)�ݣ��Լ����ęn�ĽY(ji��)��(g��u)���š� 1.1 �n�}�о����������xϴ�·��Ĺŵ�����һ��(g��)�ز����ٵļ҄�(w��)�ڄӣ����ҕ�ϵĄ�����Ҳ���Կ������Ŵ��DŮ�����·��õ���߅�ù����ô����ִ�ȵȡ������S���r(sh��)�g�����ƣ��Ƽ��İl(f��)չ�����F(xi��n)���ÙC(j��)еϴ�´����ֹ�ϴ�µIJ���������1858�꣬һ��(g��)�Нh�ܠ��D��ʷ��˹����������ƥ�ı��Ƴ��������ϵ�һ�_ϴ�C(j��)���@��(g��)ϴ�C(j��)���w�O(sh��)Ӌ(j��)���^���Σ�����������һֻ�AͰ��Ͱ��(n��i)�b��һ�����И����~�ӵ�ֱ�S���S��ͨ�^�u�Ӻ������B�������D(zhu��n)�ӵġ����@�_ϴ�C(j��)ʹ���������^�M(f��i)�������Ҍ�����ēp��Ҳ���^�����Բ��]���V��ʹ�ã����ǽo�˂��ÙC(j��)�������ֹ�ϴ�·����뷨��һ��(g��)���P(gu��n)��Ҫ�Ć�ʾ���r(sh��)�����죬ϴ�C(j��)�ѽ�(j��ng)�l(f��)չ��һ��(g��)�dz����M(j��n)ˮƽ�� �҂��@һ����Ҳ������̵��w����ϴ�C(j��)�İl(f��)չ����90������ڣ���ͨ��߀���������Ԅӵ�ϴ�C(j��)�������ǷNϴ��˦�ɷ��_�ɂ�(g��)�LͲ���ǷNҪ�҂���ϴ��õ��·��������õ�����һ��(g��)�LͲȥ˦�ɡ��ڽ��쿴���DZ��^����ϴ�C(j��)�������ڮ�(d��ng)�r(sh��)Ҳ��ʮ�����M(j��n)�ġ��ٵ���90������ڳ��F(xi��n)��ȫ�Ԅ�ϴ�C(j��)��ȫ�Ԅ�ϴ�C(j��)��һ��(g��)�ش�Ŀ�Խ�����IJ���ʮ�ַ��㣬�҂�ֻҪ���·����M(j��n)ȥ���ٰ��_ʼ���^һ�Εr(sh��)�g����ϴ�ò��Ԅ�˦�ɡ��F(xi��n)�ڵ�ϴ�C(j��)�����M(j��n)�ˣ����˸���Ĺ��ܣ������ԄӺ�ɡ��Ԅ��ٺõȵȸ���(sh��)�õĹ��ܡ� ��ϴ�C(j��)����ϵ�y(t��ng)�������@һ��(g��)�����®a(ch��n)���ģ��O(sh��)Ӌ(j��)һ�����Ƶ�ϴ�C(j��)����ϵ�y(t��ng)���ڄڄ���������Ҫ���x��һ��(g��)�õĿ���ϵ�y(t��ng)�����H���ڱ��Cϴ�Ƀ��·���ǰ���£�߀�܉���õı��o(h��)�·�����(ji��)�s�r(sh��)�g��
1.2������Ҫ���о���(n��i)�����O(sh��)Ӌ(j��)����STC89S52��Ƭ�C(j��)�������оƬ��ʹ��L298����оƬ����늙C(j��)�(q��)�ӣ�ʹ�÷��Q���������(b��o)��ϵ�y(t��ng)��ʹ��LCD1602�����@ʾ��ʹ��LED�������(bi��o)ʾϴ� �B(t��i)��ϵ�y(t��ng)��ܛ������ͨ�^����(g��)���r(sh��)���f(xi��)ͬ���������ϴ�µ�Ưϴ�^�̣����D(zhu��n)4�룬ֹͣ2�룬���D(zhu��n)4�룬ֹͣ2�롣������ϵ�y(t��ng)���\(y��n)���^���У�ͨ�^����/ֹͣ���I�톢�Ӻ͕�ͣϴ�C(j��)��ͨ�^ģʽ�ГQ�_�P(gu��n)���ГQϴ�C(j��)�ژ�(bi��o)��(zh��n)ϴ�죬����ϴ�죬Óˮ����(g��)ģʽ�ГQ��ͨ�^���I��ģ�Mϴ�C(j��)��Óˮ�^���з��w��(b��o)����ͣ���ܡ� ��������(g��)ϵ�y(t��ng)���ԣ�ϵ�y(t��ng)��늴_�J(r��n)��ϵ�y(t��ng)ͬĬ�J(r��n)�M(j��n)�뵽��(bi��o)��(zh��n)ģʽ����(d��ng)����(bi��o)��(zh��n)ϴ���12��犺�ϴ�C(j��)�M(j��n)����ˮÓˮ��Ȼ���M(j��n)�뵽Ưϴ�^6��犣��ڴ��^���У���(bi��o)��(zh��n)ϴ��ָʾ������ˮÓˮָʾ���քe�����W�q����ʾ�����M(j��n)�е��^�̣�����Ժ��Ưϴ��Óˮ������������(g��)��(bi��o)��(zh��n)ϴ���^�̡����ڿ���ϴ���^�̸���(bi��o)��(zh��n)ϴ���^��һ�ӣ�����Óˮģʽ��ϴ�C(j��)�M(j��n)�뵽�������D(zhu��n)ģʽ����(d��ng)�з��wģ�M���I���r(sh��)��ϴ�C(j��)��ͣ���҈�(b��o)���� ��Ҫ���O(sh��)Ӌ(j��)�΄�(w��)�У���һ���ǰѿ��еķ������e���������x�������m�ķ��������x�����оƬ��늙C(j��)�(q��)�ӵķ������_�����µ��O(sh��)Ӌ(j��)���ڶ������O(sh��)Ӌ(j��)��Ƭ�C(j��)���ƿ���ϵ�y(t��ng)Ӳ�����܉�?q��)��F(xi��n)����늙C(j��)���@ʾ��(d��ng)ǰ������B(t��i)���r(sh��)�g����(b��o)���ȵȵĹ��ܣ���������ܛ���O(sh��)Ӌ(j��)���O(sh��)Ӌ(j��)�˙C(j��)�������棬늙C(j��)�(q��)�ӳ���(b��o)�������O(sh��)Ӌ(j��)��ģʽ�x������O(sh��)Ӌ(j��)���Д�����O(sh��)Ӌ(j��)�ȵȣ����IJ��E��ϵ�y(t��ng)�{(di��o)ԇ���棬�{(di��o)ԇϵ�y(t��ng)��Ӳ����ܛ���������M(j��n)�з��棬���O(sh��)Ӌ(j��)�Ƿ�ɹ���
2ϵ�y(t��ng)�������w�O(sh��)Ӌ(j��)
2.1 ȫ�Ԅ�ϴ�C(j��)ָ��(bi��o)Ҫ��ȫ�Ԅ�ϴ�C(j��)��ָ��(bi��o)Ҫ�����£� ���ȣ���(bi��o)��(zh��n)ϴ��12�����Ưϴ6��犣�Ưϴ�ɴξ�Óˮ3��犡� ��Σ�����ϴ��7�����Ưϴ3��犣�Ưϴ�ɴΣ�Óˮ�� ���߀���Ԍ�(sh��)�F(xi��n)���Ӻ͕�ͣ���o���ƣ���һ�Ά��ӣ���(bi��o)��(zh��n)ϴ�죻�����r(sh��)���˰��o��ͣ���ٰ��t�֏�(f��)������ϴ�졢Ưϴ4�����D(zhu��n)��ͣ2�룬���D(zhu��n)4�룬ͣ2�룬�^�m(x��)�\(y��n)�С����˰�ȫ����Óˮ�r(sh��)��������_�w�壨K3�Iģ�M����Óˮ��ͣ����ϴ��r(sh��)ϴ��ָʾ���W�q��Ưϴ�r(sh��)Ưϴָʾ���W�q��Óˮ�r(sh��)Óˮָʾ���W�q�� ���I�����O(sh��)�룺K1�I��׃����(bi��o)��(zh��n)�����١���ˮ�����N��ʽ����(zh��)������(y��ng)������(y��ng)LED�W�q��Ĭ�J(r��n)��(bi��o)��(zh��n)ģʽ��k2�I��׃����ϴ�C(j��)�ġ����ӡ���ͣ�����ܡ�����ͣ���ٰ��»֏�(f��)�\(y��n)�С�K3�Iģ�M���_�w�壬��Óˮ�r(sh��)��������_�w�壬Óˮ��ͣ�� ����(j��)�O(sh��)Ӌ(j��)����Ҫ��Ҫ���һ��(g��)���^���Ƶ�ϴ�C(j��)�����������Ҫע��ÿһ��(g��)��(x��)��(ji��)����ϵ�y(t��ng)�{(di��o)ԇ�������m�Ĺ�����B(t��i)������Ҫ��һ���Ŀɿ��ԣ����Կɿ��������O(sh��)Ӌ(j��)�^���Б�(y��ng)ԓ��(y��u)�ȿ��]��һ��(g��)���أ�һ��(g��)����ϵ�y(t��ng)���Ҫ�ܷ�(w��n)�����ɿ��ع���������Ͷ�뵽���a(ch��n)��(sh��)�`��ȥ�����ϵ�y(t��ng)�Ŀɿ��Բ����_(d��)��Ҫ����ôϵ�y(t��ng)���F(xi��n)���ϵĿ��ܾ͕������п��ܕ���ɺܴ�ēpʧ��
2.2 ϵ�y(t��ng)�����x��
2.2.1 �������x�����O(sh��)Ӌ(j��)�Г���һ��(g��)������������Ҫ�����(q��)����̖�a(ch��n)�����Լ���Ϣ�ĬF(xi��n)��(sh��)�ȹ��ܣ����������кܶ�N�������BһЩ�������Լ����O(sh��)Ӌ(j��)���õĿ������� ����һ���x��STC89C52��������������ȣ�STC89C52��51��(n��i)�ˣ���8λ��Ƭ�C(j��)����ָ���Dz��õı��Q�顰CISC���ď�(f��)�sָ�������111�lָ���(n��i)����Ȼ�S�������Ҳ������Ρ�[1]߀�У����Ĺ��늉���5V��������һЩоƬ������ͬ�Ĺ��늉����俹�ɔ_������(qi��ng)���˿����ײ�������(g��u)������С����ϵ�y(t��ng)���Ρ�[2] ԓ�����Č�(sh��)���ԺͿɿ��Ա��^�ߣ����ԝM��^�����(sh��)���ƣ��x��51��Ƭ�C(j��)��������������ڳ��W(xu��)�߿��Ժܷ���Ę�(g��u)��һ��(g��)��С����ϵ�y(t��ng)��������ľ��̺ܺ��Σ��ɱ��ͣ����ڲ����ߌ�(sh��)�F(xi��n)����Ŀ��(bi��o)�� ���������x��MSP430�����������MSP430��TI��˾���a(ch��n)��һ����Ŀ���оƬ���书�ĵͣ����늉�3.3V������Թ����ڵ���ģʽ�����Ԝp��ϵ�y(t��ng)�Ĺ��ģ�����MSP430��Ƭ�C(j��)��16λ�Ć�Ƭ�C(j��)�������˾���ָ���RISC���Y(ji��)��(g��u)��ֻ�к�����27�lָ�������ָ��t��ģ�Mָ�����ļĴ����Լ�Ƭ��(n��i)��(sh��)��(j��)�Ĵ������Ʌ��Ӷ�N�\(y��n)�㡣[3] ԓ�����ڵ��ĺ��\(y��n)�������Ͼ��кܴ�ă�(y��u)�ݣ�Ȼ����Ŀɿ��Բ��ߣ��俹�ɔ_�������^�����Ҫ�����侎��������^��(f��)�s��оƬ�ɱ����^�ߣ����������(f��)�s�� (li��n)ϵ���O(sh��)Ӌ(j��)���΄�(w��)�����ڿ�������Ҫ���Ǻܸߣ����ԏ��O(sh��)Ӌ(j��)�ɱ��Լ��ɿ��Ժ͌�(sh��)ʩ�y�ȵȷ��濼�]�����O(sh��)Ӌ(j��)�x����Ʒ���һ������Ʒ����x��
2.2.2 늙C(j��)�(q��)�����x�����O(sh��)Ӌ(j��)Ҫ��ϴ�C(j��)��늙C(j��)�M(j��n)�п��ƣ��x��ǡ��(d��ng)?sh��)�늙C(j��)�(q��)�ӷ���������늙C(j��)���ƣ��ڱ��O(sh��)Ӌ(j��)��Ҫ��늙C(j��)�����{(di��o)�٣�늙C(j��)���Ը�׃�����w�������£� ����һ�����Ô�(sh��)���λ���Ӵ������(w��n)������(g��u)���{(di��o)���·�������^�����(g��u)��늉������׃�·���ڱ������У�ͨ�^�(q��)�Ӕ�(sh��)���λ����׃�������(w��n)������ݔ��늉����Ķ���(sh��)�F(xi��n)늉��{(di��o)�٣�ͨ�^�^����ГQ늉��������׃ݔ��늉����Ķ���׃늙C(j��)�D(zhu��n)�����@һ�N�k���팍(sh��)�F(xi��n)늙C(j��)�{(di��o)���mȻ�������ܣ���������ʹ���˴����r(ji��)���F�Ĕ�(sh��)���λ����оƬ���ɱ��ܸߣ������{(di��o)�ٷ������V�� �����������Ì���늙C(j��)�{(di��o)�ٿ�����L298���M(j��n)��늙C(j��)���ơ�L298ͨ�^�Ă�(g��)�������_�����ƃɂ�(g��)늙C(j��)���\(y��n)���ٶ��Լ��\(y��n)��늉������^ʹ��L298�팦늙C(j��)�{(di��o)�ٵĕr(sh��)��Ҫ�\(y��n)��PWM�����M(j��n)�п��ƣ��@�N���Ʒ������H���ɶȸߣ����ڿ��ƣ���������(g��)ϵ�y(t��ng)�ijɱ������^�͡� (li��n)ϵ���O(sh��)Ӌ(j��)���΄�(w��)�����ڱ��O(sh��)Ӌ(j��)߀Ҫ����棬�����O(sh��)Ӌ(j��)�����ɱ���Ҫ�����ԣ��ڱ��O(sh��)Ӌ(j��)�x�÷������팦늙C(j��)���ơ�
2.3 ϵ�y(t��ng)���w�O(sh��)Ӌ(j��)
�ڱ��O(sh��)Ӌ(j��)�У�Ҫ��(sh��)�F(xi��n)ϴ�C(j��)��ȫ�Ԅӿ��ƣ�������(g��)����ϵ�y(t��ng)�У�Ҫ��늙C(j��)���ƣ���(b��o)�����ƣ�Һ���@ʾ�Լ��I�Pݔ��ȹ��ܣ��ڱ��O(sh��)Ӌ(j��)������Ҫ�w�F(xi��n)����늙C(j��)�����ܿ��ƣ���ܛ�����挍(sh��)�F(xi��n)������ͨ�^���I�x��ϴ�C(j��)�Ĺ���ģʽ���x���깤��ģʽ��ϵ�y(t��ng)�M(j��n)�뵽����(y��ng)��ģʽ���\(y��n)�У����\(y��n)�е��^����Ҳ����ͨ�^���I�톢ͣ늙C(j��)������߀�����ð��I��ģ�MÓˮ���w��(b��o)�����ܡ����O(sh��)Ӌ(j��)�Ŀ��w�O(sh��)Ӌ(j��)��D���£�   �D2-1 ȫ�Ԅ�ϴ�C(j��)����ϵ�y(t��ng)��D Fig.2-1 Block diagram of control system of automatic washing machine �ɈD2-1����֪��������(g��)ϵ�y(t��ng)�֞�����K���˙C(j��)��������B(t��i)�@ʾ����(zh��)���·�����@��(g��)����(g��)ģ�K�У��˙C(j��)����ģ�K��Һ�����I�P�M�ɣ�������(g��)ϵ�y(t��ng)�У�ͨ�^늙C(j��)�\(y��n)�Еr(sh��)�g���Дஔ(d��ng)ǰ늙C(j��)�\(y��n)�Р�B(t��i)����(d��ng)ϴ�C(j��)��ϴ��r(sh��)�g���˺�ϵ�y(t��ng)�Ԅ��\(y��n)�е���ˮÓˮ��B(t��i)����������(y��ng)��ָʾ���W�q��ͨ�^���I���O(sh��)��ϴ�C(j��)�\(y��n)�Р�B(t��i)��������ϴ�C(j��)�\(y��n)���^���У�ͨ�^����/��ͣ���I�톢�Ӻ͕�ͣ��ϴ�C(j��)����(d��ng)ϴ�C(j��)ϴ�½Y(ji��)���ĕr(sh��)��늙C(j��)ֹͣ�����Q����(b��o)������Óˮ�ĕr(sh��)���ð��I��ģ�M���w����(d��ng)�а��I���r(sh��)��ϴ�C(j��)ֹͣÓˮ�����҈�(b��o)������(d��ng)�ٴΰ��µĕr(sh��)��ϵ�y(t��ng)�M(j��n)�뵽����Óˮģʽ��
3 ϵ�y(t��ng)Ӳ���·�O(sh��)Ӌ(j��)
3.1 늙C(j��)�(q��)���·�O(sh��)Ӌ(j��)
3.1.1 L298��Bƽ�r(sh��)�҂����^��ϴ�C(j��)�����r(sh��)���l(f��)�F(xi��n)����ϴ�·����^���У�ϴ�C(j��)���D(zhu��n)�ӕ���형r(sh��)��D(zhu��n)һ����ͣһ��������r(sh��)��D(zhu��n)һ����ͨ�^�@�ӵĄ��������܉������ք����·������á���?y��n)����D(zhu��n)���D(zhu��n)���Թ�����늙C(j��)�D(zhu��n)�ٲ����^�죬��Ȼ��늙C(j��)�Ă��������^����Óˮ�r(sh��)��ϴ�C(j��)ֻ���賯ijһ��(g��)����������D(zhu��n)�������x�����ķ���������˦�ɡ� ���O(sh��)Ӌ(j��)ϵ�y(t��ng)��늙C(j��)�(q��)�Ӳ��õ���늙C(j��)�(q��)��оƬL298�������(q��)������_(d��)3A�����ԝM��ϵ�y(t��ng)������������L298���(q��)�ӷ�ʽ���^���Σ� L298�Ѓɂ�(g��)늉�ݔ�룬һ��(g��)�o늙C(j��)��늉���һ��(g��)�ǽoоƬ�����c����߉�ą���늉���L298�ஔ(d��ng)�����Ă�(g��)�(q��)���T��ÿ��(g��)IN1������(y��ng)ԓһ��(g��)OUT1����(d��ng)IN1����ƽ�ǣ�OUT1ݔ�����ƽ��늉���VSS��Ҳ���ǽo�@��(g��)оƬ늙C(j��)�Ĺ��늉�������ָ�IJ���߉늉���[5]��Ҋ�D2-1�cL298�ă�(n��i)��ԭ��D3-1���O(sh��)Ӌ(j��)ÿ��(g��)�ɂ�(g��)�(q��)���T����һ·����늙C(j��)����̖���@�ӿ���ʹ늙C(j��)���Ă�(g��)�����\(y��n)�У������D(zhu��n)�����D(zhu��n)��ͣ܇�����ɻ��С�ENA�cENB��ʹ�ܵĿ��ƣ��������PWM��늙C(j��)�M(j��n)���{(di��o)�٣�������ENA�cENB�зքe����PWM��̖��IN1�cIN2����IN3�cIN4���քe���Կ���늙C(j��)�������D(zhu��n)�c���D(zhu��n)�����˷���һЩ�Ӿ���늙C(j��)�����·���O(sh��)Ӌ(j��)ݔ���ĽӾ����ӣ�ݔ�����ӷքe�飺OUT1��OUT2��OUT3��OUT4��ͬ�r(sh��)���˷�����ľ��IJ��M(j��n)늙C(j��)���ڽӾ�������Ҳ�O(sh��)Ӌ(j��)����λ��ᘣ�ݔ����̖�c�Ӿ�������ͬ�����[7]��L298��(n��i)��ԭ��D��D3-1��ʾ�� 
�D3-1 L298��(n��i)��ԭ��D Fig.3-1 L298 internal schematic diagram 3.1.2 늙C(j��)�(q��)���·�O(sh��)Ӌ(j��)
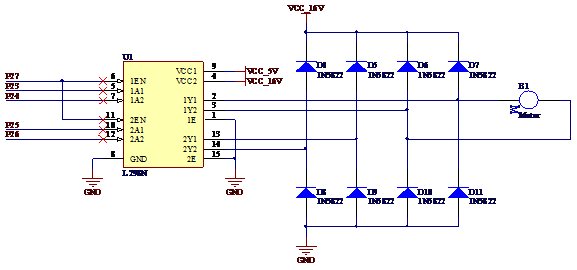
���O(sh��)Ӌ(j��)ϵ�y(t��ng)��늙C(j��)�(q��)�Ӳ��õ���L298늙C(j��)�(q��)��оƬ����?y��n)���L298늙C(j��)оƬ�ھ���������ֻҪ�ɂ�(g��)ָ����܉�M��늙C(j��)�����D(zhu��n)�����D(zhu��n)��ֹͣ�ȵȵĹ��ܡ��������^���Σ�����Ҳ�������ס�����D3-2����L298�Ĺ��_�D�� 
�D3-2 L298���_�D Fig.3-2 L298 Pin diagram L298�Ѓ�·�Դ�քe��߉�Դ�̈́����Դ�������·ԭ��D��D3-3��ʾ�����D��5V��߉�Դ��16V������Դ��ENA�cENBֱ�ӽ���5V߉�ԴҲ�����f�ɂ�(g��)늙C(j��)�r(sh��)�̶�������ʹ�ܠ�B(t��i)������늙C(j��)���\(y��n)�Р�B(t��i)ֻ��ͨ�^IN1�cIN2��IN3�cIN4�ɂ�(g��)�ӿڡ������҂�ʹ�õ�늙C(j��)�Ǿ�Ȧʽ�ģ��ڏ��\(y��n)�Р�B(t��i)ͻȻ�D(zhu��n)�Q��ֹͣ?f��n)�B(t��i)�͏�형r(sh��)ᘠ�B(t��i)ͻȻ�D(zhu��n)�Q����r(sh��)ᘠ�B(t��i)�r(sh��)���γɺܴ�ķ�����������·�м�����O�ܵ����þ����ڮa(ch��n)����������ĕr(sh��)���M(j��n)��й�������o(h��)оƬ�İ�ȫ����ݔ��˴�����O��ͬ�������o(h��)���á�[16] �D3-3 L298�(q��)��ԭ��D Fig.3-3 Schematic of L298 driver
3.2 ��Ƭ�C(j��)���Ɔ�Ԫ�O(sh��)Ӌ(j��)3.2.1��Ƭ�C(j��)��B ����Ӌ(j��)��C(j��)�У���Ƭ�C(j��)��Ӌ(j��)��C(j��)���к���Ҫ�ĵ�λ�����ҵõ��V���đ�(y��ng)�á�Ҳ�����҂����f�Ć�Ƭ�C(j��)����Ƭ�C(j��)������ИI(y��)����ʮ����Ҫ�����á���Ƭ�C(j��)Ҳ���҂��W(xu��)��(x��)�����c(di��n)�������֪����Ƭ�C(j��)�ڽ�������Ӌ(j��)��C(j��)�ИI(y��)�Ƕ�ô����Ҫ������?y��n)��Ƭ�C(j��)���V����(y��ng)���ڿ���ϵ�y(t��ng)�У�����Ҳ�����Q�������������Ƭ�C(j��)Ҳ����������X��һ����r����Ƭ�C(j��)���Ǽ����·оƬ�����^���(n��i)��������Ӌ(j��)��C(j��)�Ĺ��ܲ��֣��ӷ������惦���Լ��c���O(sh��)�B�ӵ�I/O�O(sh��)�䡣��ˣ���Ƭ�C(j��)���ϻ��������·�Լ�����(y��ng)�����O(sh��)�·����Ԙ�(g��u)���҂���Ҫ�Ŀ���ϵ�y(t��ng)�� STC89C52�Ǔ���51��(n��i)�ˆ�Ƭ�C(j��)�ĵ��ͮa(ch��n)Ʒ���چ�Ƭ�C(j��)��(n��i)������������̎����������惦��(ROM)����(sh��)��(j��)�惦��(RAM)�����r(sh��)/Ӌ(j��)��(sh��)�������нӿڡ����нӿں��Д�ϵ�y(t��ng)�Ȏ״��Ԫ����(sh��)��(j��)��������ַ�����Ϳ��ƿ�������������D3-4��ʾ����STC89C52��Ƭ�C(j��)������̎����(CPU)������(g��)��Ƭ�C(j��)�ĺ��IJ������Ǔ���8��(sh��)��(j��)̎���ܵ�̎�������܉�̎��8λ�M�ɵĴ��a�͔�(sh��)��(j��)��CPU��һ��(g��)���X�����ã�ؓ(f��)؟(z��)ָ�]���{(di��o)��ϵ�y(t��ng)�ĸ���(g��)��Ԫ�f(xi��)�{(di��o)������оƬ��(n��i)���Ѓɂ�(g��)16λ�Ŀɾ��̶��r(sh��)/Ӌ(j��)��(sh��)�����Ԍ�(sh��)�F(xi��n)���r(sh��)��Ӌ(j��)��(sh��)�a(ch��n)���Д����ڿ��Ƴ����D(zhu��n)��Ƭ�Ϲ���4�M8λI/O��(P0��P1��P2��P3)�����ڌ��ⲿ��(sh��)��(j��)�Ă�ݔ���߂��^���Ƶ��Д�ܣ��Ѓɂ�(g��)���Дࡢ�ɂ�(g��)���r(sh��)/Ӌ(j��)��(sh��)���Д��һ��(g��)�����Д࣬�ɝM�㲻ͬ�Ŀ���Ҫ������2���ă�(y��u)�ȼ��e�x�� 
�D3-4 STC89C52���_�ֲ� Fig.3-4 STC89c52Pin diagram
��STC89C52����(g��)���_�������c��B�� - VCC�ǹ��늉���
- GND�ǽӵأ�
- P0����һ��(g��)�p��I/O�ڣ�ÿ��(g��)���_����������8TLL�������(d��ng)P1�ڵ����_�ڵ�һ�α��Þ���ƽ�ĕr(sh��)���ʾ�����ݔ�롣P0�܉�����c�ⲿ�惦�����B�ӣ����ҳ䮔(d��ng)��8λ��ַ���ߔ�(sh��)��(j��)��ʹ��FLASH���̵ĕr(sh��)���������������ڣ�Ҳ����ͨ�^P1�ڿ��ѳ���?q��)��M(j��n)��Ƭ�C(j��)�С�
- P2����һ��(g��)�p��I/O�ڣ����҃�(n��i)��©�O������P2�� �������龏�_�����ܣ�����ݔ��P0��һ����������(d��ng)P2�ڱ���1�ĕr(sh��)��ԓ�̱ܽ����������ƽ����ʾ��(d��ng)ǰ��ݔ���B(t��i)����(d��ng)����ݔ��r(sh��)�����ƽ�����O(sh��)���ͣ������ݔ�����@�����ڃ�(n��i)���������ľ��ʡ�
- P3����һ��(g��)�p��I/O�ڣ����҃�(n��i)��©�O������P2�� �������龏�_�����ܣ�����ݔ��P0��һ����������(d��ng)P3�ڱ���1�ĕr(sh��)��ԓ�̱ܽ����������ƽ����ʾ��(d��ng)ǰ��ݔ���B(t��i)������ݔ�룬�����ⲿ��������ƽ��P3�ڌ�ݔ�������ILL���@�����������ľ��ʡ� P3��Ҳ���������d�˿ڵ�һЩ����ڡ�
���w���f��STC89C52��һ���(qi��ng)��Ć�Ƭ�C(j��)�������S�����ϵ�y(t��ng)�ṩ���`��ɱ����͵Ľ�Q�����������O(sh��)Ӌ(j��)֮���Բ���STC89C51��Ƭ�C(j��)��Ҫ���둪(y��ng)��STC89C52���ⲿ�Д�Ͷ��r(sh��)���Д��Ƭ���Ԏ����ⲿ�YԴ���Ķ�ʹ�O(sh��)Ӌ(j��)�����ס�
3.2.2 �Д�ϵ�y(t��ng)
�Д���̎����̎���ⲿͻ�l(f��)�¼���һ��(g��)��Ҫ���g(sh��)������ʹ̎�������\(y��n)���^���Ќ��ⲿ�¼��l(f��)�����Д�Ո�r(sh��)���M(j��n)��̎����̎����ɺ�����������?c��i)��c(di��n)���^�m(x��)�M(j��n)��̎����ԭ���Ĺ������|�l(f��)�Д���¼���ԭ����Ա��Q���Д�Դ������(j��)�Д�ĵIJ�ͬ��Դ�������Д�ķN֞�ܛӲ���Д࣬��Ӳ�����Д��ֿ��Է֞����ⲿ�¼��̓�(n��i)���¼��|�l(f��)���Д���� �ⲿ�Д�һ����ָ���ⲿ�¼��|�l(f��)�ģ��磺�I�P�����r(sh��)����ADC�ȡ��ⲿ�Д��ǿ������ε��Д࣬Ҳ�����f�������Д���������������@Щ�ⲿ�O(sh��)����Д�Ո���Д��Ǹ���(g��)�O(sh��)Ӌ(j��)ϵ�y(t��ng)�в���ȱ�ٵ�һ��(g��)���ܡ� 3.2.3���r(sh��)��
�ڱ��O(sh��)Ӌ(j��)�в��õ���51���r(sh��)����ͨ�^�ڌW(xu��)У�ČW(xu��)��(x��)�Ͳ�����P(gu��n)���Y�ϣ�����֪��51���r(sh��)�������^�麆�Ρ��乤��ԭ��飺��Ƭ�C(j��)�����ɂ�(g��)���r(sh��)�����@�ɂ�(g��)���r(sh��)��Ҳ��Ӌ(j��)��(sh��)���������������M(j��n)�о��̿��ƣ������������ķN������ʽ��ͨ�^�������ֺ����P(gu��n)�Ĵ��������x���������ڲ�ͬ�Ĺ�����ʽ�� ���w��Ҫ���ǣ����r(sh��)��0�Ŀ��ƼĴ���TL0����8λ���� TH0����8λ����(g��u)�ɣ����r(sh��)��1�Ŀ��ƼĴ���TL1����8λ����TH1����8λ����(g��u)�ɡ�ͨ�^��׃���P(gu��n)�Ĵ�����ֵ����ʹ���������ڲ�ͬ�ķ�ʽ��TCON�t���ڶ��r(sh��)���Ć�ͣ��ͬ�r(sh��)߀��������(bi��o)־�ȹ��ܡ������_ʼ�r(sh��)�茦�@Щ�Ĵ����M(j��n)�г�ʼ����Ȼ����ܿ����@Щ�Ĵ�����
3.2.4����ϵ�y(t��ng)�·�O(sh��)Ӌ(j��)
��D3-5��ʾ��ϵ�y(t��ng)�����·ϵ�y(t��ng)�·ԭ��D����ͨ�^C45,S1��R22�M�ɶ��ɵď�(f��)λ�·�������P(gu��n)���Y�Ͽ���֪��51��Ƭ�C(j��)����ƽ��(f��)λ����Ƭ�C(j��)��늕r(sh��)�����C45��R22�M�ɵ�RC�·����ݾ�����늣�ʹRST�˱���һ��(g��)�ׂ�(g��)��ĸ��ƽ��ʹ��Ƭ�C(j��)��늏�(f��)λ����(d��ng)���C45��M늺�RST�_�ƽͨ�^������茢�ƽ���͞��㣬��Ƭ�C(j��)�_ʼ�M(j��n)���\(y��n)�Р�B(t��i)����(f��)λ��ɡ���(d��ng)��Ƭ�C(j��)���\(y��n)�е��^�У�ͨ�^���°��IS1Ҳ�����γ�һ��(g��)���ƽ��B(t��i)����Ƭ�C(j��)�քӏ�(f��)λ�� 
�D3-5��(f��)λ�· Fig.3-5 Reset circuit �·�О���Ӌ(j��)�r(sh��)����Ӌ(j��)�㣬���O(sh��)Ӌ(j��)�ľ����x��12MHz�oԴ�ⲿ������σɂ�(g��)�������C2,C3���γɾ��w�C���·���Ƭ�C(j��)�ṩһ��(g��)12MHz�ķ�(w��n)���ĕr(sh��)�Դ�����˷���������������x��22pF���·�D��D3-6��ʾ 
�D3-6 �����· Fig.3-6 Crystal oscillator circuit ��Ƭ�C(j��)��ԭ��D��D3-6��ʾ���ڱ��O(sh��)Ӌ(j��)��ʹ��51��Ƭ�C(j��)�����ÈD3-4���D3-5���D3-6��ʾ�·�D�c�D3-7��(g��u)����Сϵ�y(t��ng)����  �D3-7 STC89C52��Ƭ�C(j��)��Сϵ�y(t��ng) Fig.3-7 STC89C52 Single chip microcomputer 3.3. �@ʾ�·�O(sh��)Ӌ(j��)
�ڱ��O(sh��)Ӌ(j��)��ʹ��LCD1602�������@ʾ����LCD1602�܉�ͬ�r(sh��)�@ʾ16x02��32��(g��)�ַ���Ҳ����2��16�С���D3-8��ʾ��LCD1602���õ���5V��늣���һЩ���A(ch��)���O(sh��)Ӌ(j��)�͌�(sh��)�(y��n)�Ҳ����ж��б��^��đ�(y��ng)�á�

�D3-8 LCD1602Һ�� Fig.3-8 LCD1602 Liquid crystal
��PROPEUSܛ���ϵ�LCD1602�·�D�O(sh��)Ӌ(j��)��D3-9��ʾ�� 
�D3-9 LCD1602�·�O(sh��)Ӌ(j��) Fig.3-9 LCD1602 circuit design 3.4 ��(b��o)���·�O(sh��)Ӌ(j��)
�ڱ��O(sh��)Ӌ(j��)�У��@Ȼ�]��Ҫ���Ј�(b��o)���·������ƽ�r(sh��)�҂���ϴ�C(j��)���ڰ�ȫ���]���������(b��o)���·���҂�ƽ�r(sh��)Ҳ��(y��ng)ԓ�������(d��ng)ϴ�C(j��)���ϴ�µĕr(sh��)��ϴ�C(j��)����ʾϴ����ɣ���(d��ng)Óˮ�r(sh��)���_�w�ĕr(sh��)��ϴ�C(j��)Ҳ����(b��o)����ʾ�Ñ�С�ģ����Ԟ��˸������Ʊ��O(sh��)Ӌ(j��)��ϵ�y(t��ng)��ʹ�O(sh��)Ӌ(j��)���Ќ�(sh��)���ԡ����O(sh��)Ӌ(j��)�м����˷��Q��(b��o)���������w���O(sh��)Ӌ(j��)��D3-10��ʾ�����·�еķ��Q������Դ���Q�����ڱ��O(sh��)Ӌ(j��)�����ڷ���ĕr(sh��)��]�����O�ܿ����_(d��)�����Q�����(q��)��Ҫ�������ڷ���̎���ĕr(sh��)��ֱ��ʹ�Æ�Ƭ�C(j��)�����_���(q��)�ӷ��Q�������ڌ�(sh��)�H���·�У�����ͨ�^һ��(g��)���O�ܵ�����Ŵ����ò����(q��)�ӷ��Q���������ڌ�(sh��)�H�·�У����˜pС��Ƭ�C(j��)��ؓ(f��)��(d��n)�����ԣ�����PNP�����O�܁��(q��)�ӷ��Q���� 
�D3-10 ��(b��o)���· Fig.3-10 The alarm circuit ��D3-10��ʾ�����Q���x��5V�ģ��(q��)�ӷ��Q����Ҫ��s100mA�������Ҳ�����f�(q��)�ӷ��Q�������O�ܵļ�늘O�����Ic=100mA�����O���x��ֱ���Ŵ�ϵ��(sh��)��100��9014������(j��)Ic=��Ib����Ӌ(j��)������O�ܻ��O���Ib=1mA����Vbe=0.7V�������ڹ����еĹ�����O�ܵļ�늘O���l(f��)��O͉���Vces=0.3V�����Ի��O����������ϵĉ����飨5-Vces-Vbe)=4V��4V/0.001A=4K�������ڛ]�И�(bi��o)�Qֵ��4K������裬�����x��4.7K���ġ��·�еİl(f��)����O���Á���ʾ��(d��ng)ǰ�O(sh��)��̎���\(y��n)�Р�B(t��i)�����·�е������Á����������o(h��)�����O�ܺͰl(f��)����O�ܵ�����������
3.5ָʾ���·�O(sh��)Ӌ(j��)
���O(sh��)Ӌ(j��)Ҫ���ڲ�ͬ�Ĺ�����B(t��i)�ĕr(sh��)��Ҫ�в�ͬ��ָʾ�����������O(sh��)Ӌ(j��)ָʾ���·�У�ͨ�^������(g��)LED�l(f��)����O�܁���ʾϵ�y(t��ng)��(d��ng)ǰ���\(y��n)�Р�B(t��i)���քe�飺Óˮ��Ưϴ��ϴ������(g��)��B(t��i)������(j��)��(d��ng)ǰ늙C(j��)�\(y��n)�еĕr(sh��)�L����ͣ���ГQ��(d��ng)ǰ��늙C(j��)�\(y��n)�Р�B(t��i)��LEDҲ����ĸ����W�q����ԭ��D3-11��ʾ�� 
�D3-11 ϴ�C(j��)�\(y��n)�Р�B(t��i)ָʾ�� Fig.3-11 Washing machine operation status indication lamp
3.6�I�P�·�O(sh��)Ӌ(j��)
���@һ��(g��)�O(sh��)Ӌ(j��)��ʹ�õ��I�P�·��1 4�I�P�·���I�P���·�Ќ�(sh��)�F(xi��n)�Ĺ����ǣ�ģʽ�x���ӕ�ͣ��ģ�Mϴ�C(j��)���w���_�����I�ȡ��ڱ��O(sh��)Ӌ(j��)�в��������·�ķ�ʽ��(g��u)���I�P�·����D3-11ʾ�����õ���1K���������ʹ���I���r(sh��)ݔ�����ƽ�����I����r(sh��)ݔ�����ƽ���Ķ���(sh��)�F(xi��n)���I����(y��ng)�Ĺ��ܡ� 4�I�P�·���I�P���·�Ќ�(sh��)�F(xi��n)�Ĺ����ǣ�ģʽ�x���ӕ�ͣ��ģ�Mϴ�C(j��)���w���_�����I�ȡ��ڱ��O(sh��)Ӌ(j��)�в��������·�ķ�ʽ��(g��u)���I�P�·����D3-11ʾ�����õ���1K���������ʹ���I���r(sh��)ݔ�����ƽ�����I����r(sh��)ݔ�����ƽ���Ķ���(sh��)�F(xi��n)���I����(y��ng)�Ĺ��ܡ� 
�D3-11�I�P�·�O(sh��)Ӌ(j��) Fig 3-11 keyboard circuit design 3.7�Դ�·�O(sh��)Ӌ(j��)���O(sh��)Ӌ(j��)��ϵ�y(t��ng)����Դ��5V�����چ�Ƭ�C(j��)���ٌ��Դ�ļy��Ҫ���^�ߣ�����LCD�����Q���ȵȲ���ʹ�õĶ���5V��늣�����ϵ�y(t��ng)��늲��þ����Դ��ϵ�y(t��ng)�Դ�·��D3-12��ʾ��

�D3-12ϵ�y(t��ng)�Դ�· Fig.3-12 The system power supply circuit ��D3-12ʾ�������Դ��220V����늡�ͨ�^���l׃������늉�������9V�������V����ֱ��늣�Ȼ���ٽ�(j��ng)�^5V�����˷�(w��n)������늉���(w��n)����5V��ֱ��늉�ݔ������̖�{(di��o)���·����Ƭ�C(j��)�·������(g��)ϵ�y(t��ng)��늡��·�D��ԭ�����£�220V����늽�(j��ng)�^����׃����T1׃�����D(zhu��n)�Q��һ��(g��)��ֵ���^С�Ľ�����̖��ͨ�^���������С��̖׃�Q��һ��(g��)�}�ӵ�ֱ����̖����(j��ng)�^�����C14��C11�ĞV������̖׃�Q��һ��(g��)�}�Ӻ�С��ֱ����̖��ͨ�^5V�ķ�(w��n)������(g��u)�ɵķ�(w��n)���·��ݔ��5V��ֱ��늉����Ӄɂ�(g��)������ڷ�(w��n)���Լ��p��ݔ��늉��ĵ��}�ӡ��������@��(g��)һ��(g��)ϵ�y(t��ng)����Դ��������\(y��n)�š���Ƭ�C(j��)��Һ�����I�P�ȵȹ���(y��ng)�Դ��ʹ�����܉������Ĺ����� 1
4.ϵ�y(t��ng)ܛ���O(sh��)Ӌ(j��)4.1 ܛ���_�l(f��)�h(hu��n)����B���@һ�ε��O(sh��)Ӌ(j��)�У���ܛ������ʹ��uVision4ܛ���M(j��n)�г���ľ�����uVision4ʹ���������^���Σ�����Ҳ�����^�鷽�㣬������ʽ��c�Z�Ծ���ܛ������Ч�ʡ�ԓܛ�������˘I(y��)��(n��i)���I(l��ng)�ȵļ��g(sh��)��Keil software��8051�_�l(f��)�����ṩ���³����������������gC������a���R��Դ�����B�Ӻ��ض�λĿ��(bi��o)�ļ��͎��ļ�����(chu��ng)��HEX�ļ��Լ��{(di��o)ԇĿ��(bi��o)���� 4.2 C�Z�Խ�B
���@��(g��)ϵ�y(t��ng)�O(sh��)Ӌ(j��)�У����õ���c�Z�Ծ�������c�Z������ӹ��̣�Ӌ(j��)��C(j��)���̵ȵȷ��������P(gu��n)��Ҫ�ġ�C�Z�������cӋ(j��)��C(j��)֮�g�M(j��n)�н����ġ������^�̵�һ�T���O(sh��)Ӌ(j��)�Z�ԡ����ČӴ����������ڳ��W(xu��)�߽M�����������{(di��o)ԇ�;S�o(h��)���Z�Ժ�����ʹ�÷����`�c�Z��߀����ֱ���L����(n��i)���ַ�����M(j��n)��λ�����ȵȵ����c(di��n)������c�Z�Կ��Ԍ�Ӳ���M(j��n)�о��̲�������ˣ������и��Z�ԵĹ��ܣ�ͬ�r(sh��)Ҳ�еͼ��Z�Եă�(y��u)�ݡ����H������ϵ�y(t��ng)ܛ�����_�l(f��)��ͬ�r(sh��)Ҳ�m���ڑ�(y��ng)��ܛ�����_�l(f��)�����Ա����O(sh��)Ӌ(j��)���õ���c�Z�Ծ��̡�
4.3 ܛ�����w�O(sh��)Ӌ(j��)
���O(sh��)Ӌ(j��)��ܛ���O(sh��)Ӌ(j��)��Ҫ����������Һ���@ʾ���I�P���裬�Д����늙C(j��)���Ƴ�����傀(g��)ģ�K�ij���������������Ҫ��ɵ����_�C(j��)������@ʾ���Լ�����(g��)ģ�K�ij�ʼ���������Д����ij�ʼ���� ��KEIL�����о��̕r(sh��)����������Ŀ��x��׃��(qi��ng)���҂�һ���v����(g��)ģ�K��������һ��(g��)C�ļ��팑���P(gu��n)���(q��)���ӳ���Ȼ��oÿһ��(g��)�ӳ����C�ļ����һ��(g��)H�ļ����Á�����C�ļ����������x���(q��)�Ӻ���(sh��)�����҃ɂ�(g��)�ļ�������Ҫһ�ӡ���(d��ng)Ҫ��ijһ��(g��)C�ļ��ĺ���(sh��)�{(di��o)�õ��e��C�ļ��еĕr(sh��)����ô��Ҫ��Ҫ�{(di��o)������C�ļ����C�ļ�����������{(di��o)�Ì���(y��ng)C�ļ���H�ļ����Á���������#include <*.h>��
4.3.1ϵ�y(t��ng)�������O(sh��)Ӌ(j��)ϵ�y(t��ng)����������Ҫ���΄�(w��)��Ҫ��ɸ���(g��)ģ�K�ij�ʼ�������ڱ��O(sh��)Ӌ(j��)��ģ�K������Һ���@ʾ����ij�ʼ�����ӕr(sh��)����ij�ʼ�����I�P�������ij�ʼ����늙C(j��)���ӳ���ij�ʼ���ȵȡ����Ҷ��x���N׃�������O(sh��)Ӌ(j��)�ij�����A(ch��)�����á����Ԍ�(sh��)�F(xi��n)��(bi��o)��(zh��n)ģʽ������ģʽ��Óˮģʽ�����І��ӕ�ͣ���ܡ����wģ�M���ܵȵȡ������{(di��o)�ø���(g��)�ӳ���������ľ��w��(sh��)�F(xi��n)�Ĺ��ܿ��Կ�������еij�����a��Ҫ��������̈D��D4-1��ʾ�� 
�D4-1 ���������̈D Fig.4-1 The main program flow chart
�������еľ��w����?q��)��F(xi��n)�Ďׂ�(g��)��Ҫ�Ĺ��ܣ� �@һ�γ����Ƕ��x�@ʾ���ij�ʼֵ�����w���£����ģʽ�x���ꮅ���ٰ��_�����I������͕���������(y��ng)��ģʽ�ij����\(y��n)�С�delay_10ms(10); �ٶ��xLCD�@ʾ��LCD_write_com(0X0C); LCD_clear(); key_flag=key_scan(); LCD_write_str(4,0,"00: : "); if(c==0)LCD_write_str(1,1,"Standard mode"); if(c==5)LCD_write_str(3,1,"fast mode"); if(c==10)LCD_write_str(1,1,"Dehydrate mode"); while(1) }�� ��D4-2��ʾ����LCDҺ���@ʾ�ij�ʼ�������� 
�D4-2 LCD��ʼ�����̿�D Fig 4-2 LCD initialization flow chart �����@һ�ηքe��ʾ���dž��ӕ�ͣ���ܣ����\(y��n)�Еr(sh��)ֻҪ�����˕�ͣ���I��늙C(j��)�͕���ͣ�\(y��n)�С� {key_flag=key_scan(); if(key_flag==UP){delay_ms(20); while(key_flag!=UP) key_flag = key_scan();temp1=~temp1;temp=!temp;buzzer_flag=temp;if(temp1==1){if(key_flag==DOWN) {delay_ms(20); while(key_flag!=DOWN) key_flag =key_scan(); buzzer_flag=!buzzer_flag; temp=0;} } �@��(g��)��ʾ������Óˮ�r(sh��)��������w늙C(j��)�͕�ͣ�\(y��n)�еij�����D4-3���wģ�M���̈D��ʾ��if(buzzer_flag==1){{motor_stop();buzzer=!buzzer;delay_10ms(10);}}if(temp1==1){if(temp2==0)motor_stop();}}

�D4-3 ���wģ�M���̿�D Fig 4-3 analogue flow diagram ����ı�ʾ�����x���ˌ���(y��ng)ģʽ�Č���(y��ng)�ij��քe�И�(bi��o)��(zh��n)ϴ�졢����ϴ�졢Óˮ�ȡ���(d��ng)���I�x����case 0��(bi��o)��(zh��n)ϴ��͕���(zh��)���@һ�γ������O(sh��)Ӌ(j��)��ϴ�죬Ưϴ��Óˮ����(y��ng)��led�ȕ��W�q��߀���O(sh��)Ӌ(j��)�˕r(sh��)�g���g��������ÿ��(g��)�^���õĕr(sh��)�g�ȵȡ�case5�ccase10ͬ�����Ǯ�(d��ng)���I�x���˿���ģʽ�cÓˮģʽ���\(y��n)�С� ��D4-4��ʾ����(d��ng)cֵ��0��5��10�ĕr(sh��)��քe��ʾ�����ژ�(bi��o)��(zh��n)ģʽ�µĹ������ڿ���ģʽ�µĹ�������Óˮģʽϵ�Ĺ����ȡ� 
�D4-4 ϴ�C(j��)ģʽ��D Fig 4-4 washing machine model diagram ÿһ��(g��)ģʽ�¶��в�ͬ�Ĺ����r(sh��)�g�c����(y��ng)��led�ȵ��@ʾ���î�(d��ng)c=0�Ę�(bi��o)��(zh��n)ģʽ�µij���?y��n)����ӣ��?bi��o)��(zh��n)ϴ��12�����Ưϴ6��犣�Ưϴ�ɴξ�Óˮ3��犡���������switch (c){case 0: { if(time_minite<12) {temp2=0;TR0=1;led3=0;led1=!led1; delay_10ms(10);} if((time_minite>=12)&&(time_minite<15)) {temp1=1;temp2=1;if(buzzer_flag==0)motor_full();led1=0;led3=!led3;delay_10ms(10);} if((time_minite==15)&&(time_second<8)) {temp1=0;temp2=0;} if((time_minite>=15)&&(time_minite<21)) {led3=0;led1=0;led2=!led2; delay_10ms(10);} if((time_minite>=21)&&(time_minite<24)) {temp1=1;temp2=1;if(buzzer_flag==0)motor_full();led2=0;led3=!led3;delay_10ms(10);} if((time_minite==24)&&(time_second<8)) {temp1=0;temp2=0;} if((time_minite>=24)&&(time_minite<30)) {led3=0;led1=0;led2=!led2; delay_10ms(10);} if((time_minite>=30)&&(time_minite<33)) {temp1=1;temp2=1;if(buzzer_flag==0)motor_full();led2=0;led3=!led3;delay_10ms(10);} if((time_minite>=33)) {TR0=0;motor_stop();buzzer=!buzzer;delay_10ms(10);} break; } 4.3.2ϵ�y(t��ng)�Д�����O(sh��)Ӌ(j��)
ϵ�y(t��ng)Ҫ��(sh��)�r(sh��)�Įa(ch��n)��ռ�ձȿ��{(di��o)��PWM�����������Д��������������˝M�㌍(sh��)�r(sh��)�ԺͿɿ��ԣ����ӳ���Ŀ��x�ԣ��ڳ�����ʹ�ö��r(sh��)���Д�����a(ch��n)��PWM������ʹ������һ��(g��)���r(sh��)�����M(j��n)��Ӌ(j��)�r(sh��)�����I�Д�Ȳ����� ���˷����\(y��n)�㣬���O(sh��)Ӌ(j��)�ж��r(sh��)�������ڷ�ʽ1������16λ���r(sh��)�ķ�ʽ��Ӌ(j��)��(sh��)���ֵ��65535�����r(sh��)����ֵӋ(j��)�㷽���飺�����x�õ�16λ���r(sh��)������(d��ng)ϵ�y(t��ng)�_���Д�ĕr(sh��)��Ӌ(j��)��(sh��)��ÿ������ĕr(sh��)��ϵ�y(t��ng)�M(j��n)�뵽�Д࣬�e����������(y��ng)�IJ�����ϵ�y(t��ng)ÿ��50ms�M(j��n)��һ���Д࣬�M(j��n)�е�Ӌ(j��)�r(sh��)�������M(j��n)�а��I���裬PWM�a(ch��n)�����tӋ(j��)��(sh��)�����O(sh��)�����£� TH0 = ��65536-100��/256 TL0 = ��65536-100��%256 TH1 = ��65536-50000��/256 TL1 = ��65536-50000��%256 ÿ��(d��ng)ϵ�y(t��ng)�\(y��n)�е�Ҫ�M(j��n)����һ��(g��)�\(y��n)�Еr(sh��)ϵ�y(t��ng)�_���Д࣬ϵ�y(t��ng)�M(j��n)�뵽ϵ�y(t��ng)�Д��У����Ҍ�ϵ�y(t��ng)�M(j��n)������(y��ng)�IJ������Д��������̈D��D4-5��4-6��ʾ�� 
�D4-5�Д����(w��)0�ӳ������̈D Fig 4-5 0 Interrupt service subroutine flow chart 
�D4-6 �Д����(w��)1�ӳ������̈D Fig 4-6 1 Interrupt service subroutine flow chart 4.3.3 �I�P������������I�P���f���֞龎�a�I�P�ͷǾ��a�I�P����Ƭ�C(j��)һ��ʹ�õ��¾��a�I�P������ϵ�y(t��ng)���f�I�P�Ē������һ��֞����ײ������裬�ӕr(sh��)�������x�蹦�ܣ��z�y���_�Ă�(g��)���E�������(q��)�ӳ������̈D��D4-7��ʾ�� ��ϵ�y(t��ng)���õ���4��1���I�P�����w�İ��I�������D��ʾ�� 
�D4-7 �I�P����������̈D Fig 4-7 keyboard scanning program flow chart �ɈD4-7��֪�ڒ��谴�I�����ǵ����̣����w�ij������£��_ʼ���x�I�P�������unsigned char key_scan(void)�����I���躯��(sh��)�����ؒ�����Iֵ��{ unsigned char key_value = 0; P2 = 0X1F; key_value = (P2&0X0f); key_value = key_value^0X0f; ����а��I���£��� if(key_value { delay_10ms(10); �ӕr(sh��)ȥ�� key_value = (P2&0X0f); �ӕr(sh��)֮������ key_value = key_value^0X0f; if(key_value) { return key_value; �����Iֵ} }else return 0;} ͨ�^�@һ�γ�����܉�?q��)��F(xi��n)���I�P�Ē��衣
4.3.4 늙C(j��)�(q��)�ӳ����O(sh��)Ӌ(j��)
늙C(j��)�(q��)�ӳ������Ì����(q��)��оƬL298���(q��)�ӣ���(d��ng)�o������L298���(q��)����̖��һ�ӵĕr(sh��)��늙C(j��)���D(zhu��n)���߷��D(zhu��n)����(d��ng)�o������L298���(q��)����̖ͬ�r(sh��)����ĕr(sh��)���c(di��n)��ֹͣ��ͬ�r(sh��)���늙C(j��)ʹ�����_����(d��ng)ʹ�����_��0�ĕr(sh��)��늙C(j��)ֹͣ�\(y��n)�С����Ʋ����繫ʽ��1����ʾ�����ƽM�Ϸ�ʽ���4-1��ʾ��  (1) (1) ��4-1 늙C(j��)�\(y��n)�Р�B(t��i)�c������̖�P(gu��n)ϵ�� Tab 4-1 motor running state and control signal relationship table | | 늙C(j��)�\(y��n)�Р�B(t��i) | | | | | | | | | | | | |
��?y��n)鱾��(g��)�O(sh��)Ӌ(j��)ʹ�õ���L298���醢��оƬ��ʹ��늙C(j��)ֻҪ�Ãɂ�(g��)��̖�Ϳ����_ʼ늙C(j��)�����D(zhu��n)�����D(zhu��n)��ֹͣ��늙C(j��)ȫ���D(zhu��n)�ӵȵȸ���(g��)��ͬ���\(y��n)�С�����늙C(j��)��ռ�ձ�pwm�����в�ͬ�Ĕ�(sh��)��(j��)�O(sh��)Ӌ(j��)�ģ���?y��n)錦�?y��ng)�ڲ�ͬ��늙C(j��)�\(y��n)��ģʽ������͌�늙C(j��)�ij�����a�քe��(sh��)�F(xi��n)�Ĺ�������һ�£�motor_forward (void) if(c==0) PWM_VALUE=70; else PWM_VALUE=90; motor1=0;��ʾ����늙C(j��)�����D(zhu��n)���Ǖr(sh��)����D(zhu��n)�٣�ͨ�^void motor_back (void) { if(c==0) PWM_VALUE=30; else PWM_VALUE=10; motor1=1; } ��ʾ����늙C(j��)�ڷ��D(zhu��n)�ĕr(sh��)����D(zhu��n)�٣�ͨ�^void motor_stop(void){ PWM_VALUE=0; motor0=0; motor1=0; }늙C(j��)ֹͣ�\(y��n)�С�ͨ�^void motor_full(void) { PWM_VALUE=100; motor1=0; }늙C(j��)ȫ���\(y��n)�С��@�Ӿ��܉�M���ڱ����O(sh��)Ӌ(j��)�Ќ�늙C(j��)�\(y��n)�еĸ���(g��)Ҫ�� ��D4-8��ʾ����(d��ng)늙C(j��)�ژ�(bi��o)��(zh��n)ģʽ������ģʽ�r(sh��)��ͨ�^��׃��b�Ŀ��ƣ��Ϳ��Ԍ�(sh��)�F(xi��n)늙C(j��)���D(zhu��n)4s��ͣ2s�����D(zhu��n)4s�Ĺ���Ҫ�� 
�D4-8늙C(j��)�\(y��n)�г����D Figure 4-8 motor running program diagram 1
5.ϵ�y(t��ng)�������Y(ji��)������5.1 Ӳ����(sh��)��
�ڽ�(j��ng)�^ǰ���ܛ���O(sh��)Ӌ(j��)��Ӳ���O(sh��)Ӌ(j��)�Ϳ�����protelܛ���L��ԭ��D��PCB ���ٸ���(j��)���õ�pcb�D�����·�壬��D5-1��ʾ��(sh��)��D���DZ��O(sh��)Ӌ(j��)�Č�(sh��)��D���ڌ�(sh��)��D�а�����Ƭ�C(j��)��Сϵ�y(t��ng)���˙C(j��)�����·��늙C(j��)�(q��)���·����B(t��i)�@ʾ�·�� 
�D5-1 ��(sh��)��D Fig 5-1 Material object
5.2ϵ�y(t��ng)����h(hu��n)����B
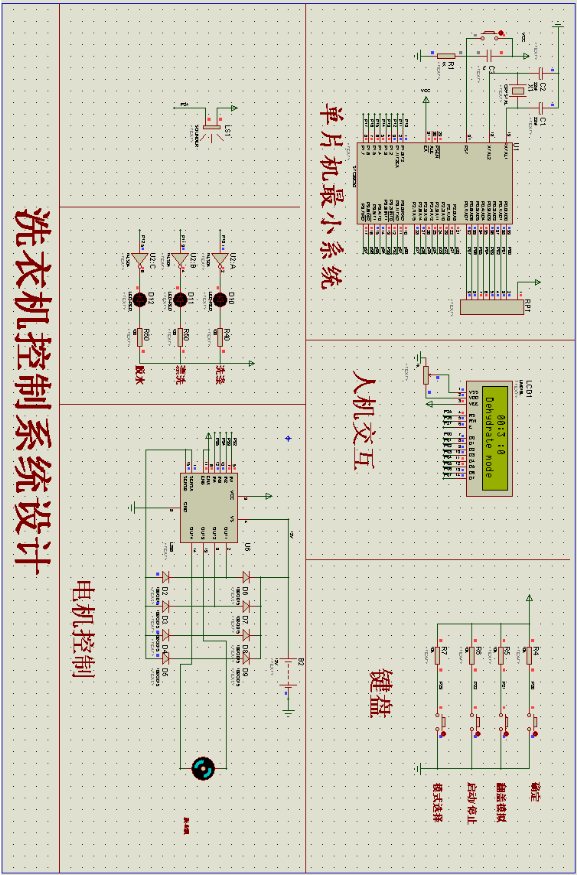
���O(sh��)Ӌ(j��)�ķ���ܛ���õ���PROTEUS����ԭ��D���D�����a�{(di��o)ԇ����Ƭ�C(j��)�c����·�f(xi��)ͬ���棬һ�I�ГQ��PCB�O(sh��)Ӌ(j��)��������(sh��)�F(xi��n)�ˏĸ���a(ch��n)Ʒ�������O(sh��)Ӌ(j��)����Ŀǰ������Ψһ���·����ܛ����PCB�O(sh��)Ӌ(j��)ܛ����̓�Mģ�ͷ���ܛ������һ���O(sh��)Ӌ(j��)ƽ�_����̎����ģ��֧��8051��HC11��PIC10/12/16/18/24/30/DsPIC33��AVR��ARM��8086��MSP430�ȵȣ�2010����������Cortex��DSPϵ��̎�����������m(x��)��������ϵ��̎����ģ�͡��ھ��g���棬��Ҳ֧��IAR��Keil��MPLAB�ȶ�N���g������?y��n)���У���g��ͬProteus�ČW(xu��)��(x��)���^ȫ�棬����ܛ����������Ҳ���^���Σ��������O(sh��)Ӌ(j��)�r(sh��)�Ͳ������@һ��(g��)ܛ�����鱾ϵ�y(t��ng)�ķ���ܛ����
5.3 ϵ�y(t��ng)����Y(ji��)������
ͨ�^������Ӳ���O(sh��)Ӌ(j��)��ܛ���O(sh��)Ӌ(j��)����ͨ�^Proteusܛ�����B�ӷ���ȫ�Ԅ�ϴ�C(j��)����ϵ�y(t��ng)�����w���B�Ӿ�·��Ҋ����е�ȫ�Ԅ�ϴ�C(j��)����ϵ�y(t��ng)ԭ��D��������(g��)ϵ�y(t��ng)�ж��܉�ͨ�^Һ���@ʾ��(d��ng)ǰ�\(y��n)�Р�B(t��i)����ͨ�^�I�P���O(sh��)�î�(d��ng)ǰ�\(y��n)�еĠ�B(t��i)����D5-2��5-3��5-4��5-5��5-6��ʾ�� 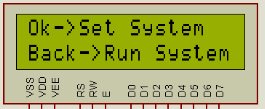 
�D5-2 �_ʼ���� �D5-3 ģʽ�x����� Fig 5-2 interface Fig 5-3 mode selection interface  
�D5-4 ��(bi��o)��(zh��n)ģʽ���� �D5-5 ����ģʽ���� Fig 5-4 standard interface Fig 5-5 fast interface 
�D5-6 Óˮģʽ���� Fig 5-6 dehdydrate interface ͨ�^������Եó�����(d��ng)ͨ�^�D5-1���D5-6��ʾ���O(sh��)�������O(sh��)��ϴ�C(j��)�����ڲ�ͬ���\(y��n)�Р�B(t��i)������ϵ�y(t��ng)�Ĺ�����B(t��i)Ҳ�ܵ��r(sh��)�g���O(sh��)������(d��ng)�r(sh��)�g�M��Ҫ���ϴ�C(j��)�Ԅ��M(j��n)�뵽��һ��(g��)��B(t��i)���\(y��n)�С������f�քe�ژ�(bi��o)��(zh��n)ģʽ������ģʽ��Óˮģʽ�¶��܉�Ҫ����ɡ�
5.4�����������}
������(g��)ϵ�y(t��ng)�ķ����^���������˸��N���}�����ǽ�(j��ng)�^�Լ���Ŭ�������ø��N����Ҳ�˷����@Щ���y�� ���ȣ��ڷ���ĕr(sh��)���F(xi��n)�(q��)��LCD1602�Ć��}��������PROTUSE����������ģ�ͣ�������ģ�͌��ڕr(sh��)�g�e���У��ڌ�(sh��)�����{(di��o)ԇ�õij����ڷ������棬LCD1602�����W�q���@ʾ����(w��n)�������ͨ�^�f(xi��)�{(di��o)��(sh��)���Ͽ��ƕr(sh��)�g�ͷ�������Ŀ��ƕr(sh��)�g�����(sh��)��ͷ��涼���Ա��^�õ��@ʾ�� ��Σ���ʹ��PROTUSE����ܛ���ĕr(sh��)���ژ�(g��u)������L298��늙C(j��)�(q��)���·�ĕr(sh��)���ڽo�@һ���늙C(j��)�(q��)��оƬ���õصĕr(sh��)����ֱ�ӌ��صķ�̖��������(y��ng)�����_���]��ͨ�^��(d��o)���B�ӣ��Ķ������_�Ĺ����£�늙C(j��)���܉��\(y��n)�С�ͨ�^��һ���Ŭ�������Ų�����e(cu��)�`������L298ʹ�÷����e(cu��)�`���^�̣��K��������(g��u)�������·�ĕr(sh��)��l(f��)�F(xi��n)���@һ���}���Ķ������Q�ˆ��}���Լ�Ҳ�W(xu��)��(x��)�����҆��}����Q���}�ķ����� ��������w����ĕr(sh��)�������Д��r(sh��)�g�r(sh��)50mSһ�Σ������ҷ����Д�����ij����\(y��n)�Еr(sh��)�g�h(yu��n)�h(yu��n)�����Д��r(sh��)�g�����Գ����\(y��n)�еIJ����������еĕr(sh��)��Ҳ�\(y��n)��������ͨ�^�Լ�������P(gu��n)���Y�ϣ���(d��ng)���M(j��n)���Д�ĕr(sh��)�����������Д࣬�Ķ����C����(g��)�Д����Ĉ�(zh��)�У����Ҍ����ֳ����õ��Д���������(zh��)�У��Ķ������Q���@һ���}�� ��֮��������(g��)������^���У��������˸��N���ӵĆ��}������ͨ�^�Լ���Ŭ�����ҿ˷��˸��N���}�����y����������ϵ�y(t��ng)�ķ��档
1
�Y(ji��)���Z
�@һ���O(sh��)Ӌ(j��)ʹ���ի@�˺ܶ࣬�e��֮ǰ�]�н��|��̫��Ӳ�������֪�R��Ȼ�����@һ���O(sh��)Ӌ(j��)��ͨ�^��ԃһЩ�Y�Ϻ͌����ώ���ͬ�W(xu��)�Ď�����ʹ�ҳ������˽����@���O(sh��)Ӌ(j��)��һЩ֪�R��Ҳʹ���J(r��n)�R�����Լ��IJ��㡣�ڴ�W(xu��)���g�����^ƫ����Փ�ČW(xu��)��(x��)�����]��̫��ע�،�(sh��)�`�������������O(sh��)Ӌ(j��)���^���п��Ǖ��������N���}��������K���Լ���Ŭ���£�߀�������������@һ�ε��O(sh��)Ӌ(j��)�� ͨ�^�@һ���O(sh��)Ӌ(j��)�����X�����܉����Փ֪�R�c��(sh��)�`��Y(ji��)�ϡ��O(sh��)Ӌ(j��)����һ��(g��)��һ��(g��)�(xi��ng)Ŀ��ͨ�^�Լ��Ī�(d��)��˼���ͷ�������Q�O(sh��)Ӌ(j��)�еĸ��N�y�}���ܺõ�呟����Լ���(d��)����Q���}�ͷ������}�������������O(sh��)Ӌ(j��)�ĕr(sh��)���ǎׂ�(g��)��һ�M���������}���Ǵ��һ���Q�ģ��������Լ��H�Hֻ�������Լ�������һ���֣��@��ʹ�Լ���֪�R�wϵ�ܲ����������܉�ȫ��ؽ�Q���}�����@һ�ε��O(sh��)Ӌ(j��)���ķ������x��Ԫ�������x���(q��)�ӳ�����O(sh��)Ӌ(j��)��ԭ��D���L�ƶ����Լ���(d��)����ɵģ����X���Լ����O(sh��)Ӌ(j��)������(g��)�^���к�����˽⡣ �mȻ�@һ�ε��O(sh��)Ӌ(j��)������ˣ�����ͨ�^�Լ��ķ�������̵��J(r��n)�R����ȫ�Ԅ�ϴ�C(j��)���O(sh��)Ӌ(j��)߀���Ԍ�(sh��)�F(xi��n)����Ĺ��ܣ����������O(sh��)Ӌ(j��)�м����˷��Q��(b��o)���������@һ��(g��)ϵ�y(t��ng)�ṩ�����ѵĹ��ܡ�߀��������������ĸ��M(j��n)����������늙C(j��)�(q��)���ϣ����Ը���������늙C(j��)��������������늙C(j��)��ʹ����Ԍ�(sh��)�F(xi��n)늙C(j��)�{(di��o)�ٵȵȵĹ��ܡ��mȻ�����O(sh��)Ӌ(j��)�л���������΄�(w��)������������ڌ�(sh��)�H��(y��ng)���У�߀����һ���Ć��}�ģ�����һ�����O(sh��)Ӌ(j��)�У�����ᘌ��@Щ���}�M(j��n)���ģ�ʹϵ�y(t��ng)�������ܻ���ʹ����Ը��ӽ�������Ҫ�������ϴ�C(j��)�Ĺ��ܡ� ������֮���O(sh��)Ӌ(j��)�ںܴ�̶���������ҵķ����ͽ�Q���}�������������Ժ�ľ͘I(y��)������ʮ�ֈ�(ji��n)��(sh��)�Ļ��A(ch��)��
�� �x��(j��ng)�^������ČW(xu��)��(x��)��һֱ�ԁ���Ŭ�����O(sh��)Ӌ(j��)�����M(j��n)��β���ڱ����O(sh��)Ӌ(j��)��������?y��n)�ʧ�����е��چ��^������?y��n)�ɹ���ϲ���^��������߀��ʮ�������@һ���O(sh��)Ӌ(j��)�����@���O(sh��)Ӌ(j��)���ҵõ����ώ���ͬ�W(xu��)�����˵ȵȵ�֧���c������������Ҫ���ĸ��x�ҵ�ָ��(d��o)�ώ����ώ��ڱ����O(sh��)Ӌ(j��)�������ҵ�ָ��(d��o)�ώ������Y���ČW(xu��)�R����(y��n)֔(j��n)��(x��)�µ��ΌW(xu��)���L(f��ng)����(sh��)�����ǵ�̎���B(t��i)�������Ӱ����ң�����ʹ�ҽK�����档��������(g��)�O(sh��)Ӌ(j��)�^���У��ώ������ṩ���O(sh��)Ӌ(j��)˼·���������O(sh��)Ӌ(j��)���P(gu��n)�Č��I(y��)֪�R�������ώ���Ϥ��ָ��(d��o)�͟��Ľ��d��ʹ���������ɴ˴��O(sh��)Ӌ(j��)���@Щ���ڱ����O(sh��)Ӌ(j��)�О���?gu��)����˺ܴ�Ď����?/p> �ڱ����O(sh��)Ӌ(j��)���^���У�߀�õ�ͬ�W(xu��)���Ď���������һֱ�����Ҵ��ɽ��y�������ṩ�S���ČW(xu��)��(x��)�Y�ϣ��o�ҵ��O(sh��)Ӌ(j��)�ṩ�˺ܶ������͌��F����Ҋ���������������ğo˽�����Ҳ���һ�����Ŀ˷��O(sh��)Ӌ(j��)�������ķN�N���g(sh��)�y�}�� ������x�ҵĸ�ĸ���ゃһֱ��ĬĬ����������֧���ң������P(gu��n)�т����������ゃ���P(gu��n)�ĺ�֧���������ɌW(xu��)�I(y��)�����xȫ�wͬ�W(xu��)�����@�������I(y��)�����ӣ��c�ゃ��̎��ÿһ�춼���ǘӵ���ϧ�� �����x���u醵ĸ�λ�ώ������x�ゃ���ҵ��O(sh��)Ӌ(j��)�M(j��n)���u�������x�ゃ���Ҵ�W(xu��)�W(xu��)��(x��)�ęz�y���Ҹ��õ���ɴ�W(xu��)�ČW(xu��)��(x��)���
���ϵ�y(t��ng)�·�D
������a���- #include <REG52.H>
- #include "lm1602.h"
- #include "delay.h"
- #include <key_scan.h>
- #include <intrins.h>
- #include <math.h>
- #include "motor.h" //�@һ�������{(di��o)�ø����ֵij�������lm1602��Һ������delay���ӕr(sh��)����key-scan���I�P����ȵȡ�
-
- sbit buzzer=P2^4;
- sbit led1=P1^0;
- sbit led2=P1^1;
- sbit led3=P1^2; //�@�����Ƕ��x���O(sh��)������(y��ng)�ľ�������(g��)led��
- unsigned char buzzer_flag=0; ���@���Ƿ��Q����(bi��o)־λ��
- unsigned char PWM_count=0;
- extern unsigned char PWM_VALUE;( PWM��ռ�ձ�,�����Ǐ�늙C(j��)���ӳ��������^����)
- unsigned char value=0;
- unsigned char a=0,b=0,c=0;
- unsigned char time_count=0;
- unsigned char time_second=0;time_minite=0;
- unsigned char key_flag=0;
- unsigned char temp1=0,temp2=0; //�@�����Ƕ��x׃��
-
- �����O(sh��)Ӌ(j��)�ɂ�(g��)���r(sh��)����������Ƕ��r(sh��)��һ�ij���
- void InitialTime1 (void)
- {
- TMOD |= 0x11;//16Ӌ(j��)��(sh��)��
- TH1=(65535-100)/256;
- TL1=(65535-100)%256;
- TH0=(65535-50000)/256;
- TL0=(65535-50000)%256;
-
- }
- void InitialIt (void)
- {
- ET1=1;
- TR1=1;
- ET0=1;
- // TR0=1;
- EA=1;
- } //���r(sh��)���ij�ʼ�����䶨�x
-
-
- �������������
- main()
- {
- InitialTime1();
- InitialIt();
- LCD_init(); //�������ʼ��
- motor_stop();
- led1=0;
- led2=0;
- led3=0;
- LCD_write_str(4,0,"welcome");
- LCD_clear();
- LCD_write_str(0,0,"Ok->Set System");
- LCD_write_str(0,1,"Back->Run System");
- while(1)
- {
- key_flag=key_scan();
- if(key_flag==OK)
- {
- while(key_flag==OK)key_flag=key_scan();
- LCD_clear();
- LCD_write_str(4,0,"00: : ");
- LCD_write_str(0,1,"1sta 2fas 3def");
- delay_10ms(10);
- Cursor_GotoXY(0,1);
- delay_10ms(10);
- LCD_write_com(0X0F);
- key_flag=key_scan(); �@һ������LCD�@ʾ�����@ʾ�����Ǹ��Nģʽ���x��
-
- while(key_flag!=OK)
- {
- key_flag=key_scan();
- if(key_flag==BACK) {while(key_flag!=BACK) key_flag = key_scan();c=c+5;if(c>10)c=0;} //���x���I1�������O(sh��)Ӌ(j��)��(sh��)��������߅�İ��I��ͨ�^�@һ��(g��)���I�����x��ͬ��ģʽ���քe�И�(bi��o)��(zh��n)ϴ�졢����ϴ�졢Óˮģʽ�ȡ�
- delay_10ms(10);
- Cursor_GotoXY(c,1);
- } //���ģʽ�x���ꮅ���ٰ��_�����I������͕���������(y��ng)��ģʽ�ij����\(y��n)��
- delay_10ms(10);
- LCD_write_com(0X0C);
- LCD_clear();
- key_flag=key_scan();
- LCD_write_str(4,0,"00: : ");
- if(c==0)LCD_write_str(1,1,"Standard mode");
- if(c==5)LCD_write_str(3,1,"fast mode");
- if(c==10)LCD_write_str(1,1,"Dehydrate mode");
-
- while(1)
- {
- �����@һ�ηքe��ʾ���dž��ӕ�ͣͬ���wģ�M�Ĺ��ܣ����\(y��n)�Еr(sh��)ֻҪ�����˕�ͣ���I��늙C(j��)�͕���ͣ�\(y��n)�С�����Óˮģʽ�£�ģ�M���wÓˮ�͕���ͣ�ȵȡ�
- key_flag=key_scan();
- if(key_flag==UP){delay_ms(20);while(key_flag!=UP) key_flag = key_scan();temp1=~temp1;temp=!temp;buzzer_flag=temp;}
- if(temp1==1){ if(key_flag==DOWN) {delay_ms(20);while(key_flag!=DOWN) key_flag = key_scan();buzzer_flag=!buzzer_flag;temp=0;} }
- ����ı�ʾ�����x���ˌ���(y��ng)ģʽ�Č���(y��ng)�ij��քe�И�(bi��o)��(zh��n)ϴ�졢����ϴ�졢Óˮ�ȡ�
- switch (c)
- {
- case 0: {
- if(time_minite<12) {temp2=0;TR0=1;led3=0;led1=!led1; delay_10ms(10);}
- if((time_minite>=12)&&(time_minite<15)) {temp1=1;temp2=1;if(buzzer_flag==0)motor_full();led1=0;led3=!led3;delay_10ms(10);}
- if((time_minite==15)&&(time_second<8)) {temp1=0;temp2=0;}
- if((time_minite>=15)&&(time_minite<21)) {led3=0;led1=0;led2=!led2; delay_10ms(10);}
- if((time_minite>=21)&&(time_minite<24)) {temp1=1;temp2=1;if(buzzer_flag==0)motor_full();led2=0;led3=!led3;delay_10ms(10);}
- if((time_minite==24)&&(time_second<8)) {temp1=0;temp2=0;}
- if((time_minite>=24)&&(time_minite<30)) {led3=0;led1=0;led2=!led2; delay_10ms(10);}
- if((time_minite>=30)&&(time_minite<33)) {temp1=1;temp2=1;if(buzzer_flag==0)motor_full();led2=0;led3=!led3;delay_10ms(10);}
- if((time_minite>=33)) {TR0=0;motor_stop();buzzer=!buzzer;delay_10ms(10);}
- break;
- } //case 0 �Ǯ�(d��ng)���I�x���˘�(bi��o)��(zh��n)ϴ��͕���(zh��)���@һ�γ������O(sh��)Ӌ(j��)��ϴ�죬Ưϴ��Óˮ����(y��ng)��led�ȕ��W�q��߀���O(sh��)Ӌ(j��)�˕r(sh��)�g���g��������ÿ��(g��)�^���õĕr(sh��)�g�ȵȡ�
-
- case 5: {
- if(time_minite<7) {temp2=0;TR0=1;led3=0;led1=!led1; delay_10ms(10);}
- if((time_minite>=7)&&(time_minite<10)) {temp1=1;temp2=1;if((buzzer_flag==0)&&(temp==0))motor_full();led1=0;led3=!led3;delay_10ms(10);}
- if((time_minite==10)&&(time_second<8)) {temp1=0;temp2=0;}
- if((time_minite>=10)&&(time_minite<13)) {led3=0;led1=0;led2=!led2; delay_10ms(10);}
- if((time_minite>=13)&&(time_minite<16)) {temp1=1;temp2=1;if((buzzer_flag==0)&&(temp==0))motor_full();led2=0;led3=!led3;delay_10ms(10);}
- if((time_minite==16)&&(time_second<8)) {temp1=0;temp2=0;}
- if((time_minite>=16)&&(time_minite<19)) {led3=0;led1=0;led2=!led2; delay_10ms(10);}
- if((time_minite>=19)&&(time_minite<22)) {temp1=1;temp2=1;if((buzzer_flag==0)&&(temp==0))motor_full();led2=0;led3=!led3;delay_10ms(10);}
- if(time_minite>=22) {TR0=0;motor_stop();buzzer=!buzzer;delay_10ms(10);}
- break;
- break;
- } //��(d��ng)�x���˿���ģʽ������͕���(zh��)���@һ���ֵij���
-
- case 10: {
- temp1=1;
- if(time_minite<3)
- {
- led3=!led3; //����(y��ng)��led���W�q
- delay_10ms(10);
- TR0=1; //�@��(g��)�Ƕ��r(sh��)��
- temp1=1;
- temp2=1;
- if((buzzer_flag==0)&&(temp==0))
- motor_full();
- else motor_stop();
-
- }
- else {motor_stop();TR0=0;}
- break;
- } //�@һ����Óˮģʽ�ij���
- }
- if(buzzer_flag==1) {{motor_stop();buzzer=!buzzer;delay_10ms(10);}}
- if(temp1==1){if(temp2==0)motor_stop();}
- }
- }
- }
-
- }
- void time0() interrupt 1 //���r(sh��)��0
- {
- TH0=(65535-50000)/256;
- TL0=(65535-50000)%256; //�@���ʾ����50�����M(j��n)���Д�
- a++;
- if(a==20)
- {
- a=0;
- if(temp1==0) //�@��temp1��0�DZ�ʾ�����ژ�(bi��o)��(zh��n)ģʽ�ºͿ���ģʽ�µĹ���
- {
- b++;
- if(b<4)motor_forward();
- if(b==4) motor_stop();
- if(b==6) motor_back();
- if(b==10) motor_stop();
- if(b==12) b=0; } //�@һ���ֱ�ʾ�����ژ�(bi��o)��(zh��n)ģʽ���ڿ���ģʽ�µ�ϴ�졢Ưϴ�r(sh��)��늙C(j��)���D(zhu��n)4s��ͣ2s���ٷ��D(zhu��n)4s��һ��(g��)����
- else{if(temp2==0)motor_stop();} //���temp1���M�������Ҫ��͕���(zh��)���@�γ�����͕��Д�temp2�Ƿ��0������ǵľͱ�ʾ����stop���I��ģ�M�ľ�����Óˮģʽ��ϴ�C(j��)���w�IJ�����늙C(j��)�͕�ֹͣ��
- time_count++;
- if(time_count==60)
- {
- time_count=0;
- time_second=0;
- time_minite++;
- LCD_clear();
- LCD_write_str(4,0,"00: : ");
- if(c==0)LCD_write_str(1,1,"Standard mode");
- if(c==5)LCD_write_str(3,1,"fast mode");
- if(c==10)LCD_write_str(1,1,"Dehydrate mode");
- }
- else time_second=time_count;
- } //�@һ���Ǖr(sh��)�g��Ӌ(j��)��(sh��)�͌���(y��ng)���@ʾ
- key_flag=key_scan();
- if(key_flag==UP) temp1=!temp1;
- if(temp1==1){ if(key_flag==DOWN) {buzzer_flag=!buzzer_flag;} }
- DIS_UINT(7,0,time_minite);
- DIS_UINT(10,0,time_second);
-
- }
-
- void time1() interrupt 3 //���r(sh��)��1
- {
- TH1=(65535-100)/256;
- TL1=(65535-100)%256; //�@��ָ����ռ�ձȣ����r(sh��)ÿ100��͈�(zh��)���Д�
- PWM_count++;
- if(PWM_count==100) PWM_count=0; //pwm��ռ�ձȞ�1k
- if(PWM_count>PWM_VALUE) motor0=0; //����pwm��ռ�ձȷ֞�0��100��ռ�ձ�
- else motor0=1;
-
- // key_flag=key_scan();
- // if(key_flag==UP) temp1=!temp1; //��ʾ���dž���ֹͣ�Ę�(bi��o)־λ����(d��ng)���I���£��͕���ͣ�\(y��n)�У��ٰ��͕��^�m(x��)�\(y��n)�С�
- // if(temp1==1){ if(key_flag==DOWN) {buzzer_flag=1;} }
-
- }
-
-
- 늙C(j��)�ij���
- ��?y��n)�ʹ�õ���l298���ӣ�����늙C(j��)ֻҪ�Ãɂ�(g��)��̖�Ϳ��Կ���늙C(j��)�������D(zhu��n)
- #include "motor.h"
- #include "delay.h"
- extern unsigned char c;
- unsigned char PWM_VALUE=0;
-
- void motor_forward(void)
- {
- if(c==0)
- PWM_VALUE=70;
- else
- PWM_VALUE=90;
- motor1=0;
- } //�@���ʾ�������D(zhu��n)
-
- void motor_back(void)
- {
- if(c==0)
- PWM_VALUE=30;
- else
- PWM_VALUE=10;
- motor1=1;
- } //�@���ʾ���Ƿ��D(zhu��n)
- ���D(zhu��n)���D(zhu��n)��ռ�ձȶ����O(sh��)����
-
- void motor_stop(void)
- {
- PWM_VALUE=0;
- ����������������
- �����������ڱ���ƪ�� ���´��aՈ��51�����d������������
���ϵ�Word��ʽ�ęn51�����d��ַ��
 word�ęn.docx
(968.97 KB, ���d��(sh��): 239)
word�ęn.docx
(968.97 KB, ���d��(sh��): 239)
2022-4-23 17:14 �ς�
�c(di��n)���ļ������d����
| 
 [��(f��)��朽�]
[��(f��)��朽�]

 ����TQQ:125739409;���g(sh��)����QQȺ281945664
����TQQ:125739409;���g(sh��)����QQȺ281945664