|
|
|
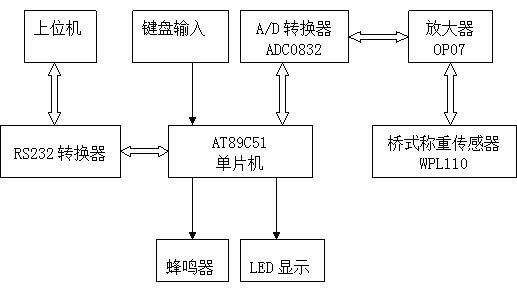
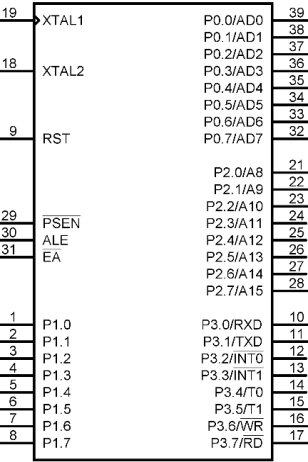
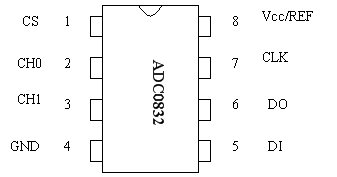
����51��Ƭ�C(j��)�ķQ(ch��ng)��ϵ�y(t��ng) һ ��(d��ng)�B(t��i)�Q(ch��ng)�����^��(d��ng)�B(t��i)�Q(ch��ng)����ָͨ�^(gu��)�����͜y(c��)��܇(ch��)̥�\(y��n)��(d��ng)�е�������(l��i)Ӌ(j��)��ԓ�\(y��n)��(d��ng)܇(ch��)�v�Ŀ��������S�ء�݆�غͲ���������(sh��)��(j��)���^(gu��)�̡���(d��ng)�B(t��i)�Q(ch��ng)��ϵ�y(t��ng)����(j��ng)�^(gu��)܇(ch��)�v�����ٶȄ��֣��ɷ֞���ل�(d��ng)�B(t��i)�Q(ch��ng)��ϵ�y(t��ng)�c���ل�(d��ng)�B(t��i)�Q(ch��ng)��ϵ�y(t��ng)����?y��n)��҇?gu��)���ٹ�·�����������120�����Ը��ل�(d��ng)�B(t��i)�Q(ch��ng)��ϵ�y(t��ng)����Փ�ϿɌ�(du��)5��120֮�g�r(sh��)��ͨ�^(gu��)�Q(ch��ng)���b�õ�܇(ch��)�v�M(j��n)�Є�(d��ng)�B(t��i)�Q(ch��ng)�ء������ل�(d��ng)�B(t��i)�Q(ch��ng)��ϵ�y(t��ng)�tһ��Ҫ����ͨ�^(gu��)܇(ch��)�v������ٶȣ�Ҫ�����^�ߵĜy(c��)�����ȣ���ՓҪ��܇(ch��)�v��5km/h���r(sh��)�ل���ͨ�^(gu��)�����҇�(gu��)��܇(ch��)�v��(d��ng)�B(t��i)�Q(ch��ng)��һ�㶼ʹ�õ��ل�(d��ng)�B(t��i)�Q(ch��ng)��(l��i)��ɣ��ںܶ����M(f��i)վ��܇(ch��)�v�z�y(c��)վ���Б�(y��ng)�ã���(gu��)��Ҳ���_(t��i)�����P(gu��n)�Ĝy(c��)����(bi��o)��(zh��n)�� �c���y(t��ng)���x�ϵ��o�B(t��i)�Q(ch��ng)����ȣ���(d��ng)�B(t��i)�Q(ch��ng)�ؿ�����܇(ch��)�v�����\(y��n)��(d��ng)��r��ֱ���M(j��n)�зQ(ch��ng)�أ��@�ӄ�(d��ng)�B(t��i)�Q(ch��ng)�صĸ�Ч�ʡ��y(c��)���r(sh��)�g�̡���������ͨ����Ҫ���c(di��n)���@����(l��i)�ˡ���(d��ng)�B(t��i)�Q(ch��ng)�صĆ�(w��n)��������ʹ܇(ch��)�v�Ĺ��������˺ܴ�Ĵ��M(j��n)���ã�����߀��(du��)�҇�(gu��)�Ĺ�·�����;S�o(h��)�������P(gu��n)��Ҫ�����á� �� ϵ�y(t��ng)���w�Y(ji��)��(g��u)���书���O(sh��)Ӌ(j��)���w�Y(ji��)��(g��u)����51��Ƭ�C(j��)��̎������ϵ�y(t��ng)����D3.1��ʾ�� �D 3.1 ���O(sh��)Ӌ(j��)Ҫ�����Д��܇(ch��)�v�Ƿ��d�����܇(ch��)�v���d����ϵ�y(t��ng)�܉��ṩԓ܇(ch��)�v�ij��d��Ϣ���l(f��)������(b��o)�����O(sh��)Ӌ(j��)����STC89C52��Ƭ�C(j��)����ϵ�y(t��ng)��̎�����ģ����Ø�ʽ�Q(ch��ng)�������ɼ���܇(ch��)�v�������D(zhu��n)�Q��늉���̖(h��o)��Ȼ��ͨ�^(gu��)�Ŵ��·��늉���̖(h��o)�M(j��n)�зŴ�̎�����͵�A/D�D(zhu��n)�Q�����D(zhu��n)�Q�锵(sh��)����̖(h��o)���ٽ�(j��ng)�^(gu��)��Ƭ�C(j��)̎������ݔ?sh��)��ӿ��·������͵���λ�C(j��)��ԓ��(sh��)��(j��)�����c��λ�C(j��)�����I�P(p��n)����ݔ���O(sh��)���Ŀ����������^���Д��ԓ܇(ch��)�v�Ƿ��d��������d���t��ͨ�^(gu��)�@ʾ�������Q�����@ʾ���d��Ϣ����(b��o)������(d��ng)Ȼ���I�P(p��n)�����ó���ݔ���O(sh��)��ֵ߀���Խ�����_(k��i)������(b��o)�� �� ��(d��ng)�B(t��i)�Q(ch��ng)��ϵ�y(t��ng)�ĽM����(d��ng)�B(t��i)�Q(ch��ng)��ϵ�y(t��ng)��Ҫ��܇(ch��)�v�����������d��ƫ�d�z�y(c��)���z�y(c��)��ϵ�y(t��ng)��؛܇(ch��)�L(zh��ng)�����������S�ߴ糬�ޙz�y(c��)��ϵ�y(t��ng)���Ԅ�(d��ng)�|�l(f��)�z��������ϵ�y(t��ng)��܇(ch��)�v�(l��i)���Ԅ�(d��ng)�Єe��ϵ�y(t��ng)��ϵ�y(t��ng)���ü�ϵ�y(t��ng)�S�o(h��)��ϵ�y(t��ng)�����܇(ch��)�v�ٶȜy(c��)����ϵ�y(t��ng)����(sh��)��(j��)�y(t��ng)Ӌ(j��)����(b��o)��̎����ϵ�y(t��ng)�͆Γ�(j��)ݔ����ӡ��ϵ�y(t��ng)�@�ײ��ֽM�ɡ�ԓϵ�y(t��ng)�M�����ƣ��������]��ȫ���ܺܺõ���ɷQ(ch��ng)���΄�(w��)�� �� ��(d��ng)�B(t��i)�Q(ch��ng)��ϵ�y(t��ng)����Ҫ������1�� ��(d��ng)�B(t��i)�z�y(c��)��ͨ�^(gu��)܇(ch��)�v���S��(sh��)���S�ء��S�ࡢ݆��(sh��)��܇(ch��)�ٵȣ� ��2�� ���Ԅ�(d��ng)�z�y(c��)��܇(ch��)�v�ĸߡ������L(zh��ng)������ߴ��Ƿ�����(bi��o)��(zh��n)�����ܽo��������λ�ľ��wλ�ú;��w��(sh��)��(j��)�� ��3�� �Ĕz�C(j��)����܇(ch��)�v��(j��ng)�^(gu��)�r(sh��)�����Ќ�(du��)Ҫ���z�y(c��)��܇(ch��)�v�M(j��n)�����գ�ԓ�C(j��)���܌�(du��)܇(ch��)��̖(h��o)�a��܇(ch��)�v�N�(l��i)�M(j��n)���R(sh��)�e����K����D���C��(j��)�� ��4�� ���Ԍ����ϸ�܇(ch��)�v��̎��ӛ䛡�������r�M(j��n)�д�ӡ������(j��)܇(ch��)�v���ij̶ȁ�(l��i)Ӌ(j��)���P�(sh��)�~����ӡ�Փ�(j��)���P��Σ� ��5�� �z�y(c��)���Ĕ�(sh��)��(j��)ȫ�����딵(sh��)��(j��)��(k��)�У�����(du��)���O(ji��n)�y(c��)���Ĕ�(sh��)��(j��)�M(j��n)�з������y(t��ng)Ӌ(j��)�����څR���ψ�(b��o)���ճ��������M(j��n)�в�ԃ(x��n)�� �� ��Ƭ�C(j��)���x�����O(sh��)Ӌ(j��)���õ���INTEL��˾�о��_(k��i)�l(f��)���a(ch��n)��STC89C52��Ƭ�C(j��)�����(n��i)������256�ֹ�(ji��)�ă�(n��i)����(sh��)��(j��)�惦(ch��)����8λ����̎���Ԫ��8KƬ��(n��i)����惦(ch��)����3��(g��)16λ���r(sh��)/Ӌ(j��)��(sh��)����32��(g��)�p��I/O�ں�һ��(g��)Ƭ��(n��i)�r(sh��)���ʎ�·��ȫ�p������ͨ�ſڣ� 5��(g��)�ɼ�(j��)�Д�Y(ji��)��(g��u)��89C52�����_�D��D4.1��ʾ�� �D 4.1 89C52���_�D ���O(sh��)Ӌ(j��)ʹ�õ��dž�Ƭ�C(j��)����Сϵ�y(t��ng)�������·�������d���·����(f��)λ�·�;����·����(f��)λ�·�У�������½ӵأ�������ϽӸ��ƽ�����g��RST����(f��)λ�·����ԭ���ǣ�ͨ늕r(sh��)����������ܴĶ��ஔ(d��ng)����ݱ���·���@��RST���_��̎�ڸ��ƽ���@�r(sh��)�Ć�Ƭ�C(j��)���ֹ������B(t��i)�����Ҫʹ��Ƭ�C(j��)������������ҪʹRST��늉������½�����һ���̶ȣ�Ҳ����RST�˞���ƽ���@����Ҫͨ�^(gu��)�Դ��(du��)����M(j��n)�г�늡� ��(f��)λ�·��(f��)λ�ķ�ʽ���ք�(d��ng)��(f��)λ����늏�(f��)λ�ɷN�����^��늏�(f��)λ������ͨ�˲�g����������ܴĶ��ஔ(d��ng)����ݱ���·���@��RST���_��̎�ڸ��ƽ���Ԅ�(d��ng)��(f��)λ���෴��ͨ�^(gu��)��(du��)��׃����������(d��ng)�����С�ĕr(sh��)���҂��Ϳ�����ݮ�(d��ng)���_(k��i)·��B(t��i)��RST�˾�̎�ڵ��ƽ����������������\(y��n)�С����ք�(d��ng)��(f��)λҪ����늏�(f��)λ�Ļ��A(ch��)�ϣ�����(f��)λ���I��ʹVCCֱ���cRST���B�����̎�ڷ�늠�B(t��i)���Ը��ƽ�γɏ�(f��)λ�����_(k��i)��(f��)λ���I��RST���f�Ǹ��ƽ���@�r(sh��)����������������ϣ�VCC�o����M(j��n)�г�늣�߀�Ǐ�(f��)λ��B(t��i)����늽Y(ji��)����RST����ƽ���܉����������� A/D�D(zhu��n)�Q��A/D�D(zhu��n)�Q������(j��)ݔ������̖(h��o)��ʽ�в���A/D�ʹ���A/D�ɷN��ADC0832 ��һ�N�����pͨ�� A/D �D(zhu��n)�QоƬ��8 λ�ֱ��ʡ����ă�(y��u)�c(di��n)���w�eС�������ԏ�(qi��ng)����?x��n)r(ji��)�ȸߣ��Ķ����܂�(g��)�˵Ěgӭ����I(y��)���J(r��n)�ɣ�Ŀǰ��������Ҳ�ѽ�(j��ng)�����^�ߵ�ʹ���ʡ� ADC0832�����܉��M(j��n)���pͨ��A/D �D(zhu��n)�Q���ֱ��ʸ��_(d��)8λ����(d��ng)����Դ��5V�r(sh��)��ݔ��늉��ܷ�(w��n)���ı�����0~5V ֮�g��TTL/CMOS�cݔ��ݔ���ƽ���ݣ����ĺܵͣ�ֻ��15mW���D(zhu��n)�Q�����r(sh��)�gֻ�� 32��S��Ҳ�����l�ʃH�� 250KHZ�����c(di��n)�������_���܈D��D4.6��ʾ��оƬ���_�ӿ��f(shu��)�����4��ʾ�� �D4.6 ���_���� ��4 ADC0832���_�f(shu��)�� | | | | | ģ�M��ݔ��ͨ�� 1�������� IN+/-ʹ�� | | ģ�M��ݔ��ͨ�� 0�������� IN+/-ʹ�� | | | | �D(zhu��n)�Q��(sh��)��(j��)ݔ������(sh��)��(j��)��̖(h��o)ݔ�� | | �x��ͨ�����ƣ���(sh��)��(j��)��̖(h��o)ݔ�� | | | | |
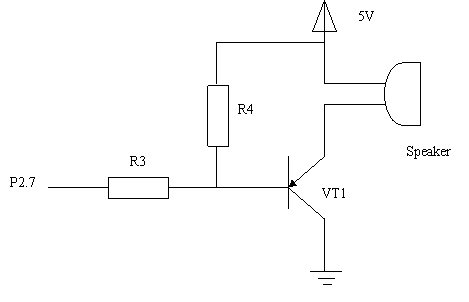
ͨ����r�µĆ�Ƭ�C(j��)��ADC0832�ĽӿڵĔ�(sh��)��(j��)��(xi��n)��(y��ng)��4�l���քe�� CS��CLK��DO��DI������A(y��ng)DC0832�Ĕ�(sh��)��(j��)��̖(h��o)ݔ��ݔ�����c��Ƭ�C(j��)�����p��ӿ�ͨ�ţ�ݔ��ݔ����Ҳ��ͬ�r(sh��)ʹ�ã����Կ��Ԍ���(sh��)��(j��)��̖(h��o)ݔ��ݔ���ڲ�(li��n)��(d��ng)һ�l��(sh��)��(j��)��(xi��n)�M(j��n)��ʹ�á�������Ӳ���ӿ��·�c��Ƭ�C(j��)�B�ӵ�ԭ����D4.7��ʾ�� ������ϵĻ�˼��늘Ŵ�����ADC0832�D(zhu��n)�Q����STC89C52��Ƭ�C(j��)�B������(l��i)���ͽM����ϵ�y(t��ng)�IJɼ�ģ�K�� �D4.7 ADC0832 �c��Ƭ�C(j��)�Ľӿ��· ��(b��o)��ģ�K��ϵ�y(t��ng)Ҫ��(sh��)�F(xi��n)һ���z�y(c��)��܇(ch��)�v���d���ޣ��͕�(hu��)�����Q�ш�(b��o)����ͨ�^(gu��)�����ˆT�ęz��̎�������(b��o)�������O(sh��)Ӌ(j��)�x�÷��Q������l(f��)�b�ã����Q�����������O�܁�(l��i)�M(j��n)�зŴ��(q��)��(d��ng)��ԓ�ӿ��·��D4.15��ʾ�� �D4.15 ��(b��o)���ӿ��· - 1 -
5. ϵ�y(t��ng)��ܛ���O(sh��)Ӌ(j��)
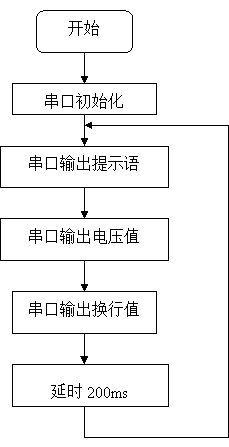
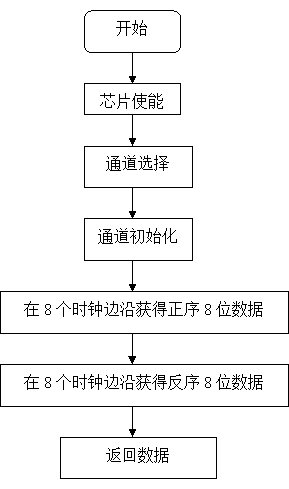
5.1 �������O(sh��)Ӌ(j��)��(d��ng)ϵ�y(t��ng)��늏�(f��)λ��ϵ�y(t��ng)�_(k��i)ʼ��ʼ���������˿ڵȣ���ʼ���ꮅ���{(di��o)�ô���ݔ����ʾ�Z(y��)���_(k��i)ʼ��(zh��n)�䴮��ݔ��늉�����(zh��n)���ꮅ���{(di��o)�ô���ݔ��늉�ֵ���_(k��i)ʼ�Ĵ���ݔ��늉�ֵ��ݔ���ꮅ���{(di��o)�ô���ݔ���Q��ֵ������_(k��i)ʼ�ӕr(sh��)200ms������(j��)ϵ�y(t��ng)�������O(sh��)Ӌ(j��)�����O(sh��)Ӌ(j��)�����������̣������ÿ�D��ʾ�� �D5.1 ���������̈D 5.3 ADC0832ܛ���O(sh��)Ӌ(j��)����Ҫ��оƬ�_(k��i)ʼʹ�ܣ���CSʹ�ܶ����ڵ��ƽ��Ȼ��ͨ�^(gu��)DI��DO��ͬһ��(sh��)��(j��)ݔ��˿ڣ��Ɍ�(sh��)�F(xi��n)ͨ�����ܵ��x�����{(di��o)��ͨ����ʼ������ʼ���ꮅ����8��(g��)�r(sh��)�߅�ث@������ͷ���8λ��(sh��)��(j��)�����?c��i)?sh��)��(j��)������(j��)�˷������O(sh��)Ӌ(j��)�����O(sh��)Ӌ(j��)��A/D�D(zhu��n)�Q�������̣���D5.2��ʾ�� ��(d��ng)��λ��(sh��)��(j��)����0�r(sh��)��CH1����ؓ(f��)ݔ��� IN-����CH0��������ݔ���IN+��(l��i)�M(j��n)�����P(gu��n)ݔ�롣��(d��ng)�˃�λ��(sh��)��(j��)����1�r(sh��)��CH1�M(j��n)�І�ͨ���D(zhu��n)�Q��CHO���D(zhu��n)�Q����(d��ng)��λ��(sh��)��(j��)�քe��0��1�r(sh��)��CH1������ݔ���IN+��CH0����ؓ(f��)ݔ���IN-��(l��i)�M(j��n)�����P(gu��n)ݔ�롣��(d��ng)��λ��(sh��)��(j��)��քe��1��0�r(sh��)��CH0�M(j��n)�І�ͨ���D(zhu��n)�Q��CH1���D(zhu��n)�Q��ADC0832�Ĺ����(xi��ng)���7��ʾ�� �D5.2 ADC0832�D(zhu��n)�Q���̈D ��7 AD0832�����(xi��ng) ADC0832�](m��i)�й����r(sh��)��DO/DI��CLK���ƽ�ɸ߿ɵͣ���CS��ݔ��˿ڑ�(y��ng)����@ʾ���ƽ���˕r(sh��)оƬ̎�ڽ��à�B(t��i)����(d��ng)A/D�D(zhu��n)�Q�M(j��n)�Еr(sh��)��CS�˿ڱ��̎�ڵ��ƽ����һֱ�����ƽ���ֵ��D(zhu��n)�Qȫ���Y(ji��)������(d��ng)оƬ�D(zhu��n)�Q�����_(k��i)ʼ��оƬ��CLK�˿ڕ�(hu��)���յ�̎�������́�(l��i)��һ�r(sh��)��}�_��DO/DI��(li��n)�˿ڌ�ʹ�Ô�(sh��)��(j��)ݔ����̖(h��o)��DI�˿ڡ� ��һ��(g��)�r(sh��)��}�_���³����F(xi��n)֮ǰ��DI�˿�һ��Ҫ�Ǹ��ƽ����ʾ��ʼ��̖(h��o)�İl(f��)�����ڵڶ�������(g��)�}�_���³����F(xi��n)֮ǰ��DI�˿�Ҫݔ���λ��(sh��)��(j��)��(l��i)�x��ͨ����������(g��)�}�_���F(xi��n)�³�֮��DI�˿ھͲ������κ����ã��˺� DO/DI��(li��n)�˿ڄt�DZ�DO�˿�ռ�I(l��ng)�M(j��n)���xȡ�D(zhu��n)�Q��(sh��)��(j��)�����Ă�(g��)�³��}�_���F(xi��n)�_(k��i)ʼ��DO�˿�ݔ�����λ���D(zhu��n)�Q��(sh��)��(j��)DATA7������(l��i)ÿ��(g��)�}�_�³�֮��DO�˿ڶ���(hu��)ݔ����һλ���D(zhu��n)�Q��(sh��)��(j��)��ֱ���l(f��)�����λ��(sh��)��(j��)DATA0��Ҳ�����ɵ�ʮһ��(g��)�}�_�l(f��)���Ĕ�(sh��)��(j��)֮���@��һ��(g��)�ֹ�(ji��)�Ĕ�(sh��)��(j��)ݔ��������ˡ���?g��u)ĵ�ʮһ��(g��)�}�_�³��_(k��i)ʼ��DATD0�_(k��i)ʼݔ����һ��(g��)�෴��(sh��)��(j��)�ֹ�(ji��)��Ȼ��һֱ����ʮ�ł�(g��)�}�_��ɔ�(sh��)��(j��)��ݔ�����@��һ��A/D �D(zhu��n)�Q�ŽY(ji��)�������Ҫ�댢�D(zhu��n)�Q��Ĕ�(sh��)��(j��)�M(j��n)�����P(gu��n)̎���ͱ�회�оƬ���ã�Ҳ���nj�CS�˿�ݔ����ƽ�� 5.4 LCD�@ʾ�����O(sh��)Ӌ(j��)�����O(sh��)���@ʾģʽ���O(sh��)�õڣ�x,y����(g��)�ַ���DDRAM�ĵ�ַ����15��2�@ʾ����?y��n)�Һ���@ʾ��15�У�����xλ�õķ�����0��15��ͬ������?y��n)��@ʾ2�У�����yλ�õķ�����0��1���@ʾ�������£� void Lcd_Pos(uchar yPos,uchar xPos) { uchar tmp; xPos &= 0x0f; //xλ�÷�����0~15����?y��n)��@ʾ15�� yPos &= 0x01; //yλ�÷�����0~1����?y��n)��@ʾ2�� if(yPos==0) //�@ʾ��һ�� { tmp = xPos; } else { tmp = xPos + 0x40; //�@ʾ�ڶ��� } tmp |= 0x80; Write_com(tmp); } 5.5 ������(sh��)ܛ����Ҫ�ֳ��Ă�(g��)���֣��������ã�ADC0832�ij�ʼ�����ȴ����ܔ�(sh��)��(j��)��ݔ����(sh��)��(j��)���������£� void main(void) { InitUART(); //���ڳ�ʼ�� Lcd_init(); Write_String("Weight: ", 0, 0); Write_String("H=", 1, 0); Write_String("L=", 1, 6); Beep = 1; while(1) { Process10ms(); DispVal(Wh, 1, 2); DispVal(Wl, 1, 8); CheckProcess(); if (flagget10s == 1) { flagget10s = 0; Get_temp(sum*100); ET0 = 1; TR0 = 1; Disp_Voltage(); //�ɼ�늉����l(f��)�� } } }
��Ƭ�C(j��)ϵ�y(t��ng)����Ӳ��ԭ��D��Ƭ�C(j��)����
- #include "reg52.h"
- #include "My_type.h" //��(sh��)��(j��)�(l��i)���^�ļ�
- #include <intrins.h>
-
- #define nop() _nop_()
- #define uchar unsigned char
- #define uint unsigned int
-
- sbit Lcd_rs=P2^0;
- sbit Lcd_rw=P2^1;
- sbit Lcd_en=P2^2;
-
- sbit key1 = P3^5;
- sbit key2 = P3^6;
- sbit key3 = P3^7;
-
- sbit Beep = P2^7;
- sbit Led = P2^6;
- sbit CS=P1^3; //ʹ��
- sbit CLK=P1^1; //�r(sh��)�
- sbit Do=P1^2; // ��(sh��)��(j��)ݔ��
- sbit Di=P1^2; //��(sh��)��(j��)ݔ��
-
- #define first_channel 0x02 //ͨ��1
- #define second_channel 0x03 //ͨ��2
- uchar CH = first_channel;
-
- #define Fclk 11059200UL /*ʹ��11.0592M���w*/
- #define BitRate 9600UL /*�����ʶ��x��9600*/
- uint8 Sending; //�l(f��)�͘�(bi��o)־
-
- code uint16 AD_Tab[41] = {512, 2048, 2970, 3840, 4659, 5581,
- 6349, 7117, 7782, 8397, 9165, 9830,
- 10291, 11162, 11520, 11981, 12749, 13210,
- 13926, 14490, 15206, 15821, 16538, 17357,
- 17971, 18842, 19814, 20838, 21760, 22477,
- 23091, 23603, 23962, 24371, 24678, 24883,
- 25037, 25190, 25293, 25395, 25600};
-
- uint8 temp_zheng;
- float temp_xiao;
-
- uint8 flag10ms = 0;
- uint8 flag50ms = 0;
- uint8 get10s = 0;
- uint8 flagget10s = 0;
- uint8 Alarmflag = 1;
- uint16 sum = 0;
- uint8 count5ms = 0;
- uint8 Wh = 40;
- uint8 Wl = 20;
-
- void Delay_lcd1602(uint dly)
- {
- uint i;
- for(; dly>0; dly--)
- for(i=0; i<100; i++);
- }
-
- bit Lcd_busy()
- {
- bit result;
- Lcd_rw = 1;
- Lcd_rs = 0;
- Lcd_en = 1;
- nop();nop();nop();nop();
- result = (bit)(P0&0x80);
- Lcd_en = 0;
- return(result);
- }
-
- void Write_com(uchar com)
- {
- while(Lcd_busy()); //LCDæ�ȴ�
- Lcd_rs = 0;
- Lcd_rw = 0;
- P0 = com;
- Delay_lcd1602(5);
- Lcd_en = 1;
- Delay_lcd1602(5);
- Lcd_en = 0;
- }
- void Write_data(uchar date)
- {
- while(Lcd_busy()); //LCDæ�ȴ�
- Lcd_rs = 1;
- Lcd_rw = 0;
- P0 = date;
- Delay_lcd1602(5);
- Lcd_en = 1;
- Delay_lcd1602(5);
- Lcd_en = 0;
- }
- void Lcd_init()
- {
- Lcd_en = 0;
- Write_com(0x38);
- Delay_lcd1602(5);
- Write_com(0x0c);
- Delay_lcd1602(5);
- Write_com(0x04);
- Delay_lcd1602(5);
- Write_com(0x01);
- Delay_lcd1602(5);
- }
- void Lcd_Pos(uchar yPos,uchar xPos) //�O(sh��)�õڣ�xPos,yPos����(g��)�ַ���DDRAM��ַ
- {
- uchar tmp;
- xPos &= 0x0f; //xλ�÷�����0~15����?y��n)��@ʾ15��
- yPos &= 0x01; //yλ�÷�����0~1����?y��n)��@ʾ2��
- if(yPos==0) //�@ʾ��һ��
- {
- tmp = xPos;
- }
- else
- {
- tmp = xPos + 0x40; //�@ʾ�ڶ���
- }
- tmp |= 0x80;
- Write_com(tmp);
- }
-
- void Write_char(uchar c,uchar xPos,uchar yPos) //���xWrite_Char����(sh��)
- {
- Lcd_Pos(xPos,yPos);
- Write_data(c);
- }
-
-
-
- void Write_String(uchar *s,uchar xPos,uchar yPos) //���xWrite_String����(sh��)
- {
- uchar i = 0;
- Lcd_Pos(xPos,yPos);
- while(*s)
- {
- Write_data(*(s++));
- if(++i>16) break;
- }
- }
-
-
- void InitUART(void)
- {
- EA=0;
- TMOD|=0x21; //���r(sh��)��1������ģʽ2
- SCON=0x50; //���ڹ�����ģʽ1
- TCON=0x05;
- TH1=256-Fclk/(BitRate*12*16);
- TL1=256-Fclk/(BitRate*12*16);
-
- TH0 = (65535 - 1000)/256;
- TL0 = (65535 - 1000)%256;
- ET0 = 1;
- TR0 = 1;
-
- PCON=0x80; //���ڲ����ʼӱ�
- ES=1; //���������S
- TR1=1; //����(d��ng)���r(sh��)��1
- REN=1; //���S����
- EA=1; //���S��
- }
- void UartISR(void) interrupt 4
- {
- if(RI) //�յ���(sh��)��(j��)
- {
- RI=0; //���Д�Ո(q��ng)��
- }
- else //�l(f��)����һ�ֹ�(ji��)��(sh��)��(j��)
- {
- TI=0;
- Sending=0; //�����ڰl(f��)�͘�(bi��o)־
- }
- }
- void PutChar_to_Uart(uint8 d)
- {
- Sending=1;
- SBUF=d;
- while(Sending);
- }
- void Prints(uint8 *pd)
- {
- while((*pd)!='\0')
- {
- PutChar_to_Uart(*pd);
- pd++;
- }
- }
-
-
- unsigned char ADconv(void)
- {
- unsigned char i;
- unsigned int data_f=0,data_c=0;
- ET0 = 0;
- TR0 = 0;
- Di=1;
- CS=1;
- _nop_();
- CS=0;
- Di=1; ;//оƬʹ��֮ǰ�ij�ʼ������һ��(g��)�½���
- CLK=1;
- _nop_();
- _nop_();
-
- CLK=0; // �_��ͨ��ģʽ����2��(g��)�½���
- _nop_();
- _nop_();
- CLK=1;
- Di=(bit)(0x02&CH); //�O(sh��)��ͨ����ʼ��
- _nop_();
- CLK=0;
- _nop_();
- _nop_();
- CLK=1;
- Di=(bit)(0x01&CH); //�O(sh��)��ͨ����ʼ�� .��3��(g��)�½���
- _nop_();
- _nop_();
- CLK=0; //AD�D(zhu��n)���ij�ʼ����ɡ�
- Di=1;
- CLK=1;
- _nop_();
- _nop_();
- CLK=0;
- _nop_();
- CLK=1;
-
-
- for(i=8;i>0;i--)//�õ�һ��(g��)���������8λ��(sh��)��(j��)
- {
- data_f|=Do;
- data_f<<=1;
- CLK=1;
- _nop_();
- _nop_();
- CLK=0;
- _nop_();
- }
- for(i=8;i>0;i--)//�õ�һ��(g��)�������е�8λ��(sh��)��(j��)
- {
- data_c<<=1;
- data_c|=Do;
- _nop_();
- CLK=1;
- _nop_();
- _nop_();
- CLK=0;
- _nop_();
- }
- CLK=0;
- _nop_();
- _nop_();
- CLK=1;
- _nop_();
- _nop_();
- CLK=0;
- _nop_();
- _nop_();
- CLK=1;
- _nop_();
- CS=1;
- _nop_();
- _nop_();
- ET0 = 1;
- TR0 = 1;
- return data_f;
- }
- /*
- void delay_ms(unsigned int x)
- {
- unsigned int i,j;
- i=0;
- for(i=0;i<x;i++)
- {
- j=108;
- while(j--);
- }
- }
-
-
-
-
-
- */
-
- void DispVal(uint8 pdat, uint8 x, uint8 y)
- {
- /*
- PutChar_to_Uart(pdat/100 + 0x30);
- PutChar_to_Uart(pdat%100/10 + 0x30);
- PutChar_to_Uart(pdat%100%10 + 0x30);
- */
- Write_char(pdat/100 + 0x30, x, y);
- Write_char(pdat%100/10 + 0x30, x, y+1);
- Write_char(pdat%100%10 + 0x30, x, y+2);
- }
-
-
- void Process10ms(void)
- {
-
- if (flag10ms == 1)
- {
- flag10ms = 0;
- count5ms ++;
- if (count5ms == 5)
- {
- count5ms = 0;
- flag50ms = 1;
- }
-
- get10s++;
- sum = sum + ADconv();
- if (get10s == 10)
- {
- get10s = 0;
- ET0 = 0;
- TR0 = 0;
- flagget10s = 1;
- sum = sum / 10;
- }
-
- if (key1==0)
- {
- while (!key1);
- Wh++;
- if (Wh >=51)
- {
- Wh = 40;
- }
- }
- if (key2==0)
- {
- while (!key2);
- Wl++;
- if (Wl >=Wh)
- {
- Wl = 20;
- }
- }
- if (key3==0)
- {
- while (!key3)
- Alarmflag = ~Alarmflag;
- }
- }
- }
-
- /*
- void Process50ms(void)
- {
- if (flag50ms == 1)
- {
- flag50ms = 0;
- Led = ~Led;
-
-
- }
- }
- */
-
- void CheckProcess()
- {
- uint16 Wig, SetH, SetL;
- Wig = (uint16)temp_zheng*100 + (uint16)(temp_xiao*100);
- SetH = (uint16)Wh*100;
- SetL = (uint16)Wl*100;
- if ((Wig>SetH) && (Alarmflag==1))
- {
- Beep = 0;
- }
- else if ((Wig<SetL) && (Alarmflag==1))
- {
- Beep = 0;
- }
- else if (Alarmflag == 0)
- {
- Beep = 1;
- }
- else
- {
- Beep = 1;
- }
-
- }
- /*
- uchar Get10sAD(void)
- {
- uchar i;
- uint sum = 0;
-
- for (i=0; i<10; i++)
- {
- sum = sum + ADconv();
- delay_ms(10);
- }
- sum = sum/10;
- return sum;
- }
-
-
- */
- void Get_temp(uint ad_temp)
- {
- uint8 n = 0;
- while(1)
- {
- if ((ad_temp >= AD_Tab[n]) && (ad_temp <= AD_Tab[n+1]))
- {
- temp_zheng = n + 10;
- temp_xiao = (1.0*(ad_temp - AD_Tab[n]))/(AD_Tab[n+1] - AD_Tab[n]);
- break;
- }
- n++;
- if (n>40)
- {
- break;
- }
- }
- }
-
- void Disp_Voltage(void)
- {
- uchar temp;
- temp = (uchar)(temp_xiao * 100);
- Prints("Weight:"); //��ʾ�Z(y��)
- PutChar_to_Uart(temp_zheng/100 + 0x30);
- PutChar_to_Uart(temp_zheng%100/10 + 0x30);
- PutChar_to_Uart(temp_zheng%100%10 + 0x30);
- PutChar_to_Uart('.');
- PutChar_to_Uart(temp/10 + 0x30);
- PutChar_to_Uart(temp%10 + 0x30);
- PutChar_to_Uart('T');
- PutChar_to_Uart(0x0d); //�Q��
- PutChar_to_Uart(0x0a); //�Q��
- Write_char(temp_zheng/100 + 0x30, 0, 8);
- Write_char(temp_zheng%100/10 + 0x30, 0, 9);
- Write_char(temp_zheng%100%10 + 0x30, 0, 10);
- Write_char('.', 0, 11);
- Write_char(temp/10 + 0x30, 0, 12);
- Write_char(temp%10 + 0x30, 0, 13);
- Write_char('T', 0, 14);
- }
-
-
- void main(void)
- {
-
- InitUART(); //���ڳ�ʼ��
- Lcd_init();
- Write_String("Weight: ", 0, 0);
- Write_String("H=", 1, 0);
- Write_String("L=", 1, 6);
- Beep = 1;
- while(1)
- {
- Process10ms();
- DispVal(Wh, 1, 2);
- DispVal(Wl, 1, 8);
- CheckProcess();
- if (flagget10s == 1)
- {
- flagget10s = 0;
- Get_temp(sum*100);
- ET0 = 1;
- TR0 = 1;
- Disp_Voltage(); //�ɼ�늉����l(f��)��
- }
-
- }
- }
-
- void Timer0() interrupt 1
- {
- static uint8 count1ms = 0;
- TH0 = (65535 - 1000)/256;
- TL0 = (65535 - 1000)%256;
- count1ms ++;
- if (count1ms == 10)
- {
- count1ms = 0;
- flag10ms = 1;
- }
-
- }
������Word��ʽ�ęn51�����d��ַ��
|
�u(p��ng)��
-
�鿴ȫ���u(p��ng)��
|


 ����TQQ:125739409;���g(sh��)����QQȺ281945664
����TQQ:125739409;���g(sh��)����QQȺ281945664