�Լ������P(gu��n)��WiFi����С܇�Č�(sh��)�(y��n)��(b��o)�棬���IJ��ã���Ո(q��ng)����
2018��ȫ��(gu��)��W(xu��)������O(sh��)Ӌ(j��)��(j��ng)ِ
WIFI����С܇��������}��
ժҪ �S���ƌW(xu��)���g(sh��)�İl(f��)չ���C(j��)���˵��O(sh��)Ӌ(j��)Խ��(l��i)Խ����(x��)������Խ��(l��i)Խ��(f��)�s������С܇�������һ��(g��)��֧��Ҳ�ڲ���l(f��)չ���ڽ����������O(sh��)Ӌ(j��)��ِ�У��P(gu��n)��С܇�����ܻ����ܵČ�(sh��)�F(xi��n)Ҳ��N���ӣ���˱����҂�Ҳ�����O(sh��)Ӌ(j��)һ����С܇��ͨ�^(gu��)WiFi�B�ӣ�ʹ��PC�˻��֙C(j��)ܛ�����ƣ�ʹ���܉�?q��)��F(xi��n)ǰ�M(j��n)���ˣ��z���D����ؿ��ƶˣ�����(sh��)�F(xi��n)ѭ�E�ͱ��ϵȹ��ܡ� ����С܇����STC89C51��Ƭ�C(j��)�������оƬ�����M(j��n)늙C(j��)�������M(j��n)������WIFIģ�K������ܲ������t�⌦(du��)�ܞ��R(sh��)�e������Ҫ�������b�ص���r�£����ڷ��A20�ķ�����(n��i)���ɻ��(d��ng)�����܉��R(sh��)�e�מ��·ɫ������10mm���ҵĺ�ɫ�z�������IJ�Ҏ(gu��)�t�ķ��]����������(d��o)܉�E������ԓ܉�E���M(j��n)������С܇�����܌�(sh��)�F(xi��n)���Ϲ���
Abstract
With the development of science and technology, the design of robots is becoming more and more sophisticated and functions are becoming more and more complex. As a branch of intelligent vehicles, intelligent cars are also developing. In the electronic design competition in recent years, the realization of the intelligent function of the car is also varied, so this time we also intend to design a smart car, through the WIFI connection, using the PC end or mobile software control, so that it can achieve forward back, camera and image back to the control end, and achieve tracking and obstacle avoidance and so on Function. This small car uses STC89C51 as the control chip, the stepping motor is a moving part, the WIFI module is used as the acceptance component, the infrared pair is a recognition device, and it is required to operate freely within the range of 20 meters in the square circle under the condition of remote control, can identify the black tape with the white bottom as the road color and the width of about 10mm. The production of irregular closed curves is a smart car that guides the trajectory and travels along the trajectory. And the obstacle avoidance function can be realized
Ŀ� һ��ϵ�y(t��ng)���� 1.��Ƭ�C(j��)ģ�K���x�� 2.늙C(j��)����ģ�K���x�� 3.�o(w��)��ͨ��ģ�K��Փ�C�c�x�� 4.�(q��)��(d��ng)ģ�K���x���cՓ�C 5.����ģ�K���x���cՓ�C ����ϵ�y(t��ng)��Փ�����cӋ(j��)�� 1.ϵ�y(t��ng)���w�O(sh��)Ӌ(j��) 2.����ģ�K�ľ��xӋ(j��)�㷽�� �����·�c�����O(sh��)Ӌ(j��) 1.�·���O(sh��)Ӌ(j��) 2. ������O(sh��)Ӌ(j��) ��1�������������c�O(sh��)Ӌ(j��)˼· ��2�� �������̈D �ġ��y(c��)ԇ�����c�y(c��)ԇ�Y(ji��)�� 1���y(c��)ԇ���� 2 �y(c��)ԇ�l���c�x�� 3 �y(c��)ԇ�Y(ji��)�������� �塢�Y(ji��)Փ�c�ĵ� ���������īI(xi��n) ��䛣�����
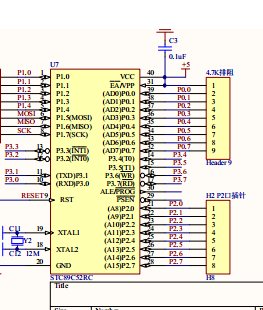
WIFI����С܇�������M�� һ��ϵ�y(t��ng)������������С܇��Ҫ���ßo(w��)��ͨ��ģ�K���(q��)��(d��ng)ģ�K����Ƭ�C(j��)ģ�K��������ģ�K������ģ�K���Դģ�K�M�ɡ�����քeՓ�C�@�ׂ�(g��)ģ�K���x�� 1.��Ƭ�C(j��)ģ�K���x������һ: ����STC89C51������оƬ����Сϵ�y(t��ng)�壬���Ɇ�Ƭ�C(j��)��(l��i)��(sh��)�F(xi��n)��(du��)WIFIģ�K���ܵ���̖(h��o)�M(j��n)��̎�����l(f��)����STC89C51��һ�N���ġ�������CMOS 8λ������������4K ��ϵ�y(t��ng)�ɾ���Flash �惦(ch��)����ʹ��Atmel ��˾���ܶȷ���ʧ�Դ惦(ch��)�����g(sh��)���죬�c���I(y��)80C51 �a(ch��n)Ʒָ������_��ȫ���ݡ�Ƭ��Flash���S����惦(ch��)����ϵ�y(t��ng)�ɾ��̣����m�ڳ�Ҏ(gu��)���������چ�оƬ�ϣ������`�ɵ�8 λCPU ����ϵ�y(t��ng)�ɾ���Flash��ʹ��STC89C51�ڱ���Ƕ��ʽ���Ƒ�(y��ng)��ϵ�y(t��ng)�еõ��V����(y��ng)�á� ��(y��u)�c(di��n)���������㣬���ú�(ji��n)�Σ���(y��ng)���ձ顣 ȱ�c(di��n)��I/O���^�٣��O(sh��)Ӌ(j��)�ⲿ�·�^���(f��)�s�� ��������STM32ϵ�І�Ƭ�C(j��) STM32ϵ�О�����ܡ��ͳɱ������ĵ�Ƕ��ʽ��(y��ng)�ÿ���ϵ�y(t��ng)�� ��(y��u)�c(di��n)��̎���ٶȿ죬Ƭ��(n��i)����惦(ch��)���g���ĵͣ��YԴ�S���� ȱ�c(di��n)������Ҫ���^�ߣ��r(ji��)��ߡ� �����܉�ܺõ�����}Ŀ�Ļ���Ҫ���Լ��l(f��)�]���ֵ�Ҫ���]������С܇�Y(ji��)��(g��u)��(ji��n)�Σ�����Ҫ�^���(f��)�s���\(y��n)�㡣���Բ��÷���һ 2.늙C(j��)����ģ�K���x������һ�����ò��M(j��n)늙C(j��)�����D(zhu��n)�^(gu��)�ĽǶȿ��Ծ��_��λ���Ɍ�(sh��)�F(xi��n)С܇���M(j��n)�^(gu��)�̵ľ��_��λ�������M(j��n)늙C(j��)��ݔ�����صͣ��q�D(zhu��n)�ٵ����߶����ͣ����D(zhu��n)��Խ�죬�½���Խ�졣 ������������ֱ��늙C(j��)�����D(zhu��n)��(d��ng)���ش��w�eС�������p���b�了(ji��n)�Σ��������㡣�ٶȵ��{(di��o)��(ji��)���Ը�׃늉�Ҳ�����{(di��o)��(ji��)PWM�� �������Ϸ������x��������ֱ��늙C(j��)�����(q��)��(d��ng)늙C(j��)��
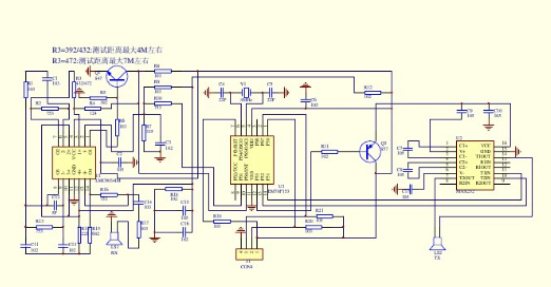
3.�o(w��)��ͨӍģ�K��Փ�C�c�x������һ���{(l��n)��ģ�K �����ձ��HC05�{(l��n)��ģ�K����һ�N���d�o(w��)��ͨӍ���g(sh��)��һ��(g��)��(bi��o)��(zh��n)�ğo(w��)��ͨӍ�f(xi��)�h�����ڵͳɱ��O(sh��)����հl(f��)��оƬ�������x��ݔ�����ĵ͡�����WPAN�o(w��)����(g��)��W(w��ng)�����c(di��n)��(du��)�c(di��n)�����c(di��n)��(du��)���c(di��n)����Ҫ���Á�(l��i)�B��һЩ����O(sh��)��ģ��������ڽ����x�M(j��n)�Д�(sh��)��(j��)��ݔ����2016��5�·��Ƴ������µİ汾Bluetooth5.0��ݔ���x�����_(d��)��150�ס� ��������WIFIģ�K Wi-Fiģ�K��������Wi-Fiģ�K��������(li��n)�W(w��ng)��ݔ�ӣ������nj����ڻ�TTL�ƽ�D(zhu��n)�����Wi-Fi�o(w��)���W(w��ng)�j(lu��)ͨ�Ř�(bi��o)��(zh��n)��Ƕ��ʽģ�K����(n��i)�ßo(w��)���W(w��ng)�j(lu��)�f(xi��)�hIEEE802.11b.g.n�f(xi��)�h�Լ�TCP/IP�f(xi��)�h�����y(t��ng)��Ӳ���O(sh��)��Ƕ��Wi-Fiģ�K����ֱ������Wi-Fi(li��n)�뻥(li��n)�W(w��ng)���nj�(sh��)�F(xi��n)�o(w��)�����ܼҾӡ�M2M����(li��n)�W(w��ng)��(y��ng)�õ���Ҫ�M�ɲ��֡����ݔ�ٶȿ졣��̖(h��o)����������(qi��ng)�� �C�����σɷN���������]����ݔ���x�Ć�(w��n)�}����ȡ��������WIFIģ�K�� 4.�(q��)��(d��ng)ģ�K���x���cՓ�C�(q��)��(d��ng)ģ�K�DZ�������С܇���P(gu��n)�I���ڣ�ֱ��늙C(j��)�Ĺ����^�����Ա���x����m���(q��)��(d��ng)ģ�K ����һ:����L298Nģ�K, L298N��һ�N������(q��)��(d��ng)�����·,����H���·, ��ݔ���������, ��������(qi��ng)����ݔ�������2A,��������4A, ��߹���늉���50V���������(q��)��(d��ng)�Б�(y��ng)ؓ(f��)�d, �����ֱ��늙C(j��)�����M(j��n)늙C(j��)��늴��y��, �e����ݔ����ӿ���ֱ���B�ӵ���Ƭ�C(j��), ��ˆ�Ƭ�C(j��)���Ʒdz����㡣���(q��)��(d��ng)ֱ��늙C(j��)�r(sh��),������ֱ�ӿ��ƃɂ�(g��)늙C(j��), ��(sh��)�F(xi��n)늙C(j��)��������, ʹ�҂�ֻ�ܸ�׃ݔ��˵�߉�ƽ��ԓϵ�y(t��ng)�O(sh��)Ӌ(j��)���õ�늙C(j��)�Ǵ��ʵ�ֱ��늙C(j��)�����ڿ��]����֮��(n��i)�� ������: ��С���늙C(j��)�����(q��)��(d��ng)��, ʹ��оƬ1298����H�����,ݔ������� 2000mA, �������� 4A, �����늉��� 36V, ���(q��)��(d��ng)�Б�(y��ng)ؓ(f��)�d,����: ���^�����ֱ��늙C(j��)�����M(j��n)늙C(j��)��ʾ��w��, �e��ݔ�����ֱ���c��Ƭ�C(j��)�B��, ���Ժ������Ɇ�Ƭ�C(j��)���ơ�����ģ�Kֻ���(q��)��(d��ng)С��ֱ��늙C(j��), �����(q��)��(d��ng)�����͵�ֱ��늙C(j��)�� ��(j��ng)�^(gu��)�м�(x��)����(f��)��Փ�C�c�x���҂��l(f��)�F(xi��n)����һ���^���m�������҂��x��L298Nģ�K�����(q��)��(d��ng)ģ�K�� 5.����ģ�K���x���cՓ�C������ģ�K��ʹ�ù�늂�������(l��i)�ɼ�·����Ϣ��ʹ�üt���늹ܣ���Y(ji��)��(g��u) ��(ji��n)������(sh��)�F(xi��n)���㣬�ɱ��������](m��i)�Џ�(f��)�s�ĈD��̎����������˷���(y��ng)�`����푑�(y��ng)�r(sh��)�g�١� �Դģ�K������5Vֱ���Դ�����늙C(j��)��WIFIģ�K��늵��Դ�� ����ģ�K��SSD-ME007TX���ڳ����y(c��)��ģ�K�Ǹ����ܣ����ԃr(ji��)�ȵķǽ��|ʽ���x�Мy(c��)ģ�K,�y(c��)��������0.02��4.00m���y(c��)������1cm���y(c��)���r(sh��)�c���y(c��)���w�o(w��)ֱ�ӽ��|���܉�������(w��n)�����@ʾ�y(c��)���Y(ji��)���� ����ϵ�y(t��ng)��Փ�����cӋ(j��)��
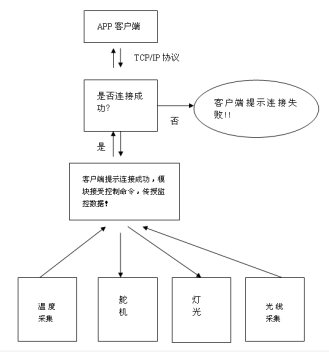
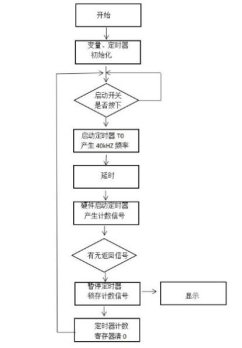
1.ϵ�y(t��ng)���w�O(sh��)Ӌ(j��)����С܇ϵ�y(t��ng)���w��D��D1.1��ϵ�y(t��ng)�������̞飺��STC89C51��Ƭ�C(j��)������ƺ��ģ�ͨ�^(gu��)�֙C(j��)�ϵ�APP��(du��)С܇�l(f��)���������С܇�ϵ�WIFIоƬ���յ�APP�l(f��)����ָ���ͨ�^(gu��)���ڂ�ݔ�oSTC89C51��Ƭ�C(j��)���_(k��i)�l(f��)��ͨ�^(gu��)��(du��)ָ���һϵ��̎������С܇�ϵ����P(gu��n)ԭ����늙C(j��)����(l��i)ָ��(d��o)С܇���ָ��(d��o)С܇�Ą�(d��ng)����

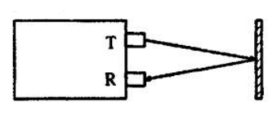
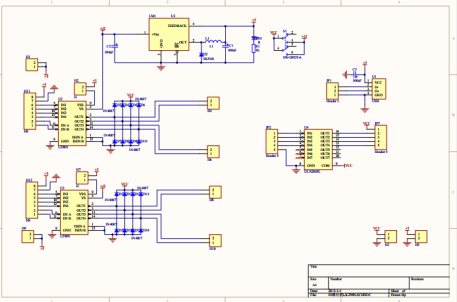
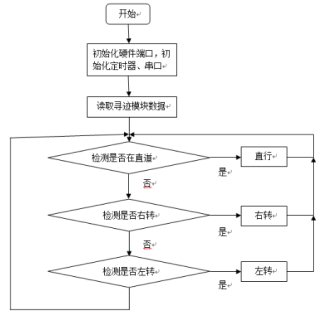
�D1.1 ϵ�y(t��ng)���w��D 2.����ģ�K�ľ��xӋ(j��)�㷽���D1.2ʾ���˳����y(c��)���ԭ�����������l(f��)����T��ijһ�r(sh��)�̰l(f��)��һ��(g��)������̖(h��o)����(d��ng)ԓ��̖(h��o)�������y(c��)���w�����(l��i)��������������R�����յ���Ӌ(j��)��İl(f��)��������̖(h��o)�����յ�������̖(h��o)���õĕr(sh��)�g���Ϳ���������l(f��)�����c�������w�ľ��x�� �D1.2 �����y(c��)��ԭ��D Ӌ(j��)�㹫ʽ�飺 d = s��2 = (Vt)��2 (1) ʽ�У�d�鱻�y(c��)���c�y(c��)���x�ľ��x��s������(l��i)�ص�·�̣�v���٣�t�����������õĕr(sh��)�g�� �ڜy(c��)������Ҫ���]�ɂ�(g��)����(sh��)���ٺͰl(f��)���}�_��(g��)��(sh��)���ٵľ��_�̶țQ���˜y(c��)�����ȡ����c�ض����P(gu��n)���y(c��)���x�����ڳ��y(c��)�����x�^�̣���ض�׃�����t���J(r��n)�����ǻ�����׃�ģ��s��344m��s����y(c��)�ྫ��Ҫ��ܸߣ��t��(y��ng)ͨ�^(gu��)�ض��a(b��)��?sh��)ķ�������У���������?qi��ng)ϵ�y(t��ng)�ɿ��ԣ���(y��ng)��ܛӲ���ϲ��ÿ��ɔ_��ʩ���l(f��)�䳬���}�_��(g��)��(sh��)�Q���y(c��)���x�y(c��)��ä�^(q��)��Ӱ표y(c��)�����ȣ�ͬ�r(sh��)�c��̖(h��o)�l(f��)���������P(gu��n)���l(f��)���}�_��(g��)��(sh��)�٣�����ߜy(c��)�����ȣ����p���˰l(f��)��������(du��)���ջز��������}�_��(g��)��(sh��)�^(gu��)����(hu��)���Ӝy(c��)��ä�^(q��)�����O(sh��)Ӌ(j��)�н�(j��ng)�^(gu��)���^���x��l(f��)��5��(g��)40KHZ���}�_��������y(c��)����̖(h��o)�� �����·�c�����O(sh��)Ӌ(j��)1.�·���O(sh��)Ӌ(j��)1.1 ����ϵ�y(t��ng)ԭ��D�D1.1.����ϵ�y(t��ng)ԭ��D 1.2L298Nԭ��D �D1.2 L298Nԭ��D 1.3����ģ�Kԭ��D �D1.3����ԭ��D 2. ������O(sh��)Ӌ(j��)��1�������������c�O(sh��)Ӌ(j��)˼·1������������ ͨ�^(gu��)�֙C(j��)����X����ܛ������С܇ǰ�M(j��n)�����ˣ����D(zhu��n)�����D(zhu��n)�����E�����ϵȹ��ܡ� 2�������O(sh��)Ӌ(j��)˼· ����(j��)�}ĿҪ�����O(sh��)Ӌ(j��)Ҫ��������С܇��ǰ�M(j��n)�����ˣ����D(zhu��n)�����D(zhu��n)����ͨ�^(gu��)�������ֱ��늙C(j��)���D(zhu��n)��(d��ng)�ͷ����E��ͨ�^(gu��)��늂������z�y(c��)��������̖(h��o)�������܇݆�����D(zhu��n)�����D(zhu��n)��ֹͣ�ȡ����ϣ�ͨ�^(gu��)����ģ�K�z�y(c��)��ǰ��15cm̎���ϵK��r(sh��)����������Ƭ�C(j��)����Ƭ�C(j��)���ƶ�C(j��)�����D(zhu��n)��(d��ng)��Ӌ(j��)������·��ʹС܇���_(k��i)�ϵK�� ��2���������̈D
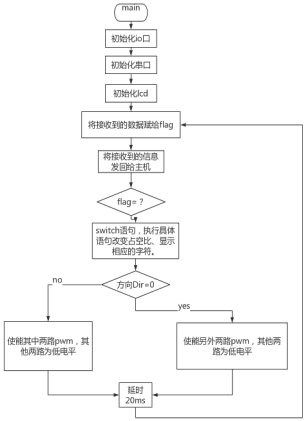
1.���������̈D �D1.4 ���������̈D 2.WiFiģ�K���̈D �D1.5 WIFIģ�K���̈D 3. �����ӳ������̈D
�D1.6�����ӳ������̈D 4.���Eģ�K���̈D �D1.7 ���Eģ�K���̈D �ġ��y(c��)ԇ�����c�y(c��)ԇ�Y(ji��)��1���y(c��)ԇ����1.1Ӳ���y(c��)ԇ ������ɺ������M(j��n)�е��{(di��o)ԇ���Ô�(sh��)���f(w��n)�ñ�y(c��)������(g��)�·�Ƿ��������Ƿ���̓��©���ȬF(xi��n)��ij��F(xi��n)���Լ�����(g��)����Ƿ���������δ��������B(t��i)��������ֵ�Ƿ��c�O(sh��)Ӌ(j��)��ԭ��D�ϵ�һ�¡���ͨ�Դ���Ô�(sh��)���f(w��n)�ñ�y(c��)����(d��ng)��+5V�ĸ����_�Ƿ���+5V��늉����y(c��)���·���Ƿ���F(xi��n)�˲�ԓ�еĶ�·�F(xi��n)�����늂�����ģ�K��ʹ����(g��)��늙z�y(c��)���Ĺ�늹ܿ��������^�쌦(du��)��(y��ng)�İl(f��)����O���Ƿ�l(f��)�⣬���l(f��)���ʾ������ Ȼ����ʹ����(g��)��늹ܿ����ھ����^�쌦(du��)��(y��ng)�İl(f��)�����(j��)���Ƿ�l(f��)�⣬�l(f��)���ʾ������ ͨ�^(gu��)�֙C(j��)��PC��ܛ���B��WIFI������С܇����(y��ng)�����Ƿ�(sh��)�F(xi��n)�� 1.2Ӳ��ܛ��(li��n)�{(di��o) ͨ�^(gu��)������(ji��n)�ε��P(gu��n)��늙C(j��)�D(zhu��n)��(d��ng)��������^��Ŀ���D(zhu��n)��(d��ng)�����c��(sh��)�H�D(zhu��n)��(d��ng)�����Ƿ�һ�£�ܛ�����{(di��o)ԇ�o(w��)�`���M(j��n)��ϵ�y(t��ng)����ܛ�������{(di��o)ԇ�� 2 �y(c��)ԇ�l���c�x���y(c��)ԇ�l�������Ќ��E�l���Ĉ�(ch��ng)�أ��ڵذ����N�к��z�����m��(d��ng)�ϵK� �y(c��)ԇ�x������(sh��)���f(w��n)�ñ����֙C(j��)��PC��ܛ�� 3 �y(c��)ԇ�Y(ji��)��������3.1�y(c��)ԇ�Y(ji��)��(��(sh��)��(j��)) С܇�ٶȌ�(du��)���E��Ӱ� WIFI��̖(h��o)��(qi��ng)����(du��)ͨӍ��Ӱ�
3.2�y(c��)ԇ�����c�Y(ji��)Փ ����(j��)�����y(c��)ԇ��(sh��)��(j��)����ϵ�y(t��ng)����Ӳ���·������������ϵ�y(t��ng)������(w��n)�����Ɍ�(sh��)�F(xi��n)�������ܣ� 1.�܉�ͨ�^(gu��)WIFI��������С܇��ǰ�M(j��n)���˵ȹ��ܡ� 2.�܉��ݔҕ�l��̖(h��o)���O(sh��)���ϡ� 3.�܉�һ�I���E�� 4.�܉�ͨ�^(gu��)����ģ�K��(sh��)�F(xi��n)���Ϲ��ܡ� �塢�Y(ji��)Փ�c�ĵ���(j��ng)�^(gu��)�Լ����������Ŭ���Լ��ώ�������ָ��(d��o)�͟�����������O(sh��)Ӌ(j��)�ѽ�(j��ng)������ɡ����@��(g��)�^(gu��)�����ώ��Լ������^(gu��)����O(sh��)Ӌ(j��)��ͬ�W(xu��)�o�����Һܴ�Ď������o���ṩ�˴�����Ӳ����ܛ���Y�ϣ�Ҳ�o�ҵ��O(sh��)Ӌ(j��)����ˌ��F����Ҋ(ji��n)�ͽ��h���ڴˣ���(du��)��ұ�ʾ���ĵĸ��x���@���O(sh��)Ӌ(j��)���H�nj�(du��)�ҵČ��I(y��)֪�R(sh��)��һ�μ��еؙz�(y��n)��ͬ�r(sh��)Ҳ���҂��ṩ��һ��(g��)�M(j��n)����(ch��ng)ǰ�Č�(sh��)��(zh��n)�C(j��)��(hu��)��ͨ�^(gu��)�@�����ώ�ָ��(d��o)�����O(sh��)Ӌ(j��)�ęC(j��)��(hu��)���Ҍ�(du��)�ڼ��g(sh��)��(sh��)�`�������˸���̵��J(r��n)�R(sh��)��Ҳ�M(j��n)һ������(sh��)�����W(xu��)�Č��I(y��)֪�R(sh��)���mȻ���O(sh��)Ӌ(j��)�Ќ�(du��)��֪�R(sh��)���\(y��n)�ú�㕽�߀�����쾚�������Ҍ����Ժ�Ĺ����͌W(xu��)��(x��)���^�m(x��)Ŭ�����������ơ��@�O(sh��)Ӌ(j��)�nj�(du��)�^(gu��)ȥ���W(xu��)֪�R(sh��)��ϵ�y(t��ng)��ߺ͔U(ku��)����^(gu��)�̣�����İl(f��)չ���������õĻ��A(ch��)����������ˮƽ���ޣ��O(sh��)Ӌ(j��)��һ�����ںܶ��֮̎����Ո(q��ng)�ώ����u(p��ng)ָ�� ���������īI(xi��n)[1] ��Ƭ�C(j��)C�Z(y��)�Խ̳� ������ ��ӹ��I(y��)������ [2] �T�Ə�(qi��ng).C�Z(y��)�Գ����O(sh��)Ӌ(j��)[M].����:���A��W(xu��)������,2012. [3] �S�ǂ� ȫ��(gu��)��W(xu��)������O(sh��)Ӌ(j��)��(j��ng)ِӖ(x��n)���̳�. [M].��ӆ��.��������ӹ��I(y��)������ ��䛣�����- #include <STC12C5A.h> //����STC12C5Aϵ�І�Ƭ�C(j��)���^�ļ�
-
- /*�����22.1184MHz ������x������*/
- #define BPS_9600 0x70
- #define BPS_19200 0xB8
- #define BPS_38400 0xDC
- #define BPS_57600 0xE8
- #define BPS_11520 0xF4
-
-
- #define Left_moto_go1 {P10=1,P12=1;} //��߅�ɂ�(g��)늙C(j��)��ǰ��
- #define Left_moto_back1 {P10=0,P12=0;} //��߅�ɂ�(g��)늙C(j��)����D(zhu��n)
- #define Right_moto_go1 {P14=1,P16=1;} //��߅�ɂ�(g��)늙C(j��)��ǰ��
- #define Right_moto_back1 {P14=0,P16=0;} //��߅�ɂ�(g��)늙C(j��)��ǰ��
-
-
- #define Left_moto_go {P10=1,P11=0,P12=1,P13=0;} //��߅�ɂ�(g��)늙C(j��)��ǰ��
- #define Left_moto_back {P10=0,P11=1,P12=0,P13=1;} //��߅�ɂ�(g��)늙C(j��)����D(zhu��n)
- #define Left_moto_Stop {P10=0,P11=0,P12=0,P13=0;} //��߅�ɂ�(g��)늙C(j��)ͣ�D(zhu��n)
- #define Right_moto_go {P14=1,P15=0,P16=1,P17=0;} //��߅�ɂ�(g��)늙C(j��)��ǰ��
- #define Right_moto_back {P14=0,P15=1,P16=0,P17=1;} //��߅�ɂ�(g��)늙C(j��)��ǰ��
- #define Right_moto_Stop {P14=0,P15=0,P16=0,P17=0;} //��߅�ɂ�(g��)늙C(j��)ͣ�D(zhu��n)
-
- #define Left_2_led P24 //
- #define Right_1_led P25 //
-
- #define Left_moto_pwm P11 //PWM��̖(h��o)��
- #define Left_moto_pwm1 P13
- #define Right_moto_pwm P15
- #define Right_moto_pwm1 P17
-
-
- #define RELOAD_COUNT BPS_9600 //�������x��
-
-
- sbit TEST_WEEL =P0^0; //�y(c��)ԇ늙C(j��)
- sbit TEST_SEVR =P0^1; //�y(c��)ԇ��C(j��)
- sbit LED5 = P0^2; //����ָʾ��
-
-
- bit rec_flag=0;
- unsigned char buffer[5];
- unsigned char se_timer[5]={0x0A,0x5a,0,0,0};
- unsigned int time=0;
-
- unsigned char pwm_val_left =0;//׃�����x
- unsigned char push_val_left =0;// ��늙C(j��)ռ�ձ�N/10
- unsigned char pwm_val_right =0;
- unsigned char push_val_right=0;// ��늙C(j��)ռ�ձ�N/10
- bit Right_moto_stop=1;
- bit Left_moto_stop =1;
-
- void Delaynms(unsigned int di) //�ӕr(sh��)
- {
- unsigned int da,db;
- for(da=0;da<di;da++)
- for(db=0;db<1000;db++);
- }
-
-
- //ǰ��ǰ�M(j��n)
- void run(void)
- {
-
- Left_moto_go ; //��늙C(j��)��ǰ��
- Right_moto_go ; //��늙C(j��)��ǰ��
- }
-
- //ǰ�ٺ���
- void backrun(void)
- {
-
- Left_moto_back ; //��늙C(j��)��ǰ��
- Right_moto_back ; //��늙C(j��)��ǰ��
- }
-
- //���D(zhu��n)
- void leftrun(void)
- {
-
- Left_moto_back ; //��늙C(j��)��ǰ��
- Right_moto_go ; //��늙C(j��)��ǰ��
- }
-
- //���D(zhu��n)
- void rightrun(void)
- {
-
- Left_moto_go ; //��늙C(j��)��ǰ��
- Right_moto_back ; //��늙C(j��)��ǰ��
- }
- //STOP
- void stoprun(void)
- {
-
- Left_moto_Stop ; //��늙C(j��)��ǰ��
- Right_moto_Stop ; //��늙C(j��)��ǰ��
- }
-
-
- void UART_init(void)
- {
- // PCON |= 0x80; //ʹ�ܲ����ʱ���λSMOD
- // SCON = 0x50; //8λ��(sh��)��(j��),��׃������
- // BRT = RELOAD_COUNT; //�O(sh��)����(d��)�������ʰl(f��)�������bֵ
- // AUXR |= 0x04; //��(d��)�������ʰl(f��)�����r(sh��)犞�Fosc,��1T
- // AUXR |= 0x01; //����1�x��(d��)�������ʰl(f��)�����鲨���ʰl(f��)����
- // AUXR |= 0x10; //����(d��ng)��(d��)�������ʰl(f��)����
-
- PCON |= 0x80; //ʹ�ܲ����ʱ���λSMOD
- SCON = 0x50; //8λ��(sh��)��(j��),��׃������
- AUXR |= 0x04; //��(d��)�������ʰl(f��)�����r(sh��)犞�Fosc,��1T
- BRT = 0xB8; //�O(sh��)����(d��)�������ʰl(f��)�������bֵ
- AUXR |= 0x01; //����1�x��(d��)�������ʰl(f��)�����鲨���ʰl(f��)����
- AUXR |= 0x10; //����(d��ng)��(d��)�������ʰl(f��)����
-
-
- PS = 1;
- ES = 0; //���S������
- TI = 1;
- }
-
- /*****************************************************
- void UART_send_byte(unsigned char byte)
- {
- ES = 0; //�P(gu��n)������
- TI = 0; //���㴮�ڰl(f��)������Д�Ո(q��ng)���(bi��o)־
- SBUF = byte;
- while(TI ==0); //�ȴ��l(f��)�����
- TI = 1; //���㴮�ڰl(f��)������Д�Ո(q��ng)���(bi��o)־
- ES = 1; //���S������
- }
- *****************************************************/
-
- void Communication_Decode(void)
- {
- if(buffer[0]==0x00)
- {
- TR1=0;ET1=0; //�P(gu��n)�]����E
- stoprun();
- switch(buffer[1])
- {
- case 0x01: run(); break;
- case 0x02: backrun(); break;
- case 0x03: leftrun(); break;
- case 0x04: rightrun(); break;
- case 0x00: stoprun(); break;
- default: return;
- }
- }
- else if(buffer[0]==0x01)
- {
- TR1=0;ET1=0; //�P(gu��n)�]����E
- stoprun();
-
- if(buffer[2]>180)
- return;
- switch(buffer[1])
- {
- case 0x01:
- {
- se_timer[0]=buffer[2];
- if(se_timer[0]<11)se_timer[0]=11;
- if(se_timer[0]>162)se_timer[0]=162;
- }
- return;
- case 0x02:
- {
- se_timer[1]=buffer[2];
- if(se_timer[1]<11)se_timer[1]=11;
- if(se_timer[1]>162)se_timer[1]=162;
- }
- return;
- //case 0x03:se_timer[2]=buffer[2]; return;
- //case 0x04:se_timer[4]=buffer[2]; return;
- default : return;
- }
- }
- else if((buffer[0]==0x09)&&(buffer[1]==0x09))
- {
- switch(buffer[2])
- {
- case 0x00: TR1=1;ET1=1; break; //���E
- case 0x01: break; //����
- default: return;
- }
- }
- else
- {
- return;
- }
- }
-
- void UART_Interrupt_Receive(void) interrupt 4
- {
- static unsigned char i;
-
- if(RI==1)
- {
- RI = 0;
-
- if(rec_flag==0)
- {
- if(SBUF==0xff)
- {
- rec_flag=1;
- i=0;
- }
- }
- else
- {
- if(SBUF==0xff)
- {
- rec_flag=0;
- if(i==3)
- {
- Communication_Decode();
- }
- i=0;
- }
- else
- {
- buffer[i]=SBUF;
- i++;
- }
- }
- }
- else
- {
- TI = 0;
- }
- }
-
-
- void Timer0_Init(void)
- {
- TMOD &= 0xf0;
- TMOD |= 0x02;
- AUXR |= 0XC0;
- // TH0=10; // 22.1184
- // TL0=10; //
-
- TH0=133; // 22.1184
- TL0=133; //
-
- TR0=1;
- ET0=1;
- }
-
- void Timer1_Init(void)
- {
-
- TMOD &= 0x0f;
- TMOD |= 0x10;
- // TH1 = 0xA9; //1MS���r(sh��) 22.1184
- // TL1 = 0x9A;
-
- TL1 = 0xCD; //�O(sh��)�ö��r(sh��)��ֵ1MS���r(sh��) 11.0592
- TH1 = 0xD4; //�O(sh��)�ö��r(sh��)��ֵ
- TR1 = 0; //�_(k��i)���r(sh��)��1
- ET1 = 0;
-
- }
-
- void Timer_0(void) interrupt 1 //��C(j��)���Ƴ���
- {
-
- time++;
- if(time<=se_timer[0]+45)
- P27=1;
- else P27=0;
-
- if(time<=se_timer[1]+45)
- P26=1;
- else P26=0;
-
-
- if(time>=1800)
- {
- time=0;
- }
-
- }
-
- /************************************************************************/
- /* PWM�{(di��o)��늙C(j��)�D(zhu��n)�� */
- /************************************************************************/
- /* ��늙C(j��)�{(di��o)�� */
- /*�{(di��o)��(ji��)push_val_left��ֵ��׃늙C(j��)�D(zhu��n)��,ռ�ձ� */
- void pwm_out_left_moto(void)
- {
- if(Left_moto_stop)
- {
- if(pwm_val_left<=push_val_left)
- {
- Left_moto_pwm=1;
- Left_moto_pwm1=1;
- }
- else
- {
- Left_moto_pwm=0;
- Left_moto_pwm1=0;
- }
- if(pwm_val_left>=10)
- pwm_val_left=0;
- }
- else
- {
- Left_moto_pwm=0;
- Left_moto_pwm1=0;
- }
- }
- /******************************************************************/
- /* ��늙C(j��)�{(di��o)�� */
- void pwm_out_right_moto(void)
- {
- if(Right_moto_stop)
- {
- if(pwm_val_right<=push_val_right)
- {
- Right_moto_pwm=1;
- Right_moto_pwm1=1;
- }
- else
- {
- Right_moto_pwm=0;
- Right_moto_pwm1=0;
- }
- if(pwm_val_right>=10)
- pwm_val_right=0;
- }
- else
- {
- Right_moto_pwm=0;
- Right_moto_pwm1=0;
- }
- }
-
-
- void Timer_1(void) interrupt 3
- {
- // static unsigned int ms_count=0;
-
- TL1 = 0xCD; //�O(sh��)�ö��r(sh��)��ֵ1MS���r(sh��) 11.0592
- TH1 = 0xD4; //�O(sh��)�ö��r(sh��)��ֵ
-
- pwm_val_left++;
- pwm_val_right++;
- pwm_out_left_moto();
- pwm_out_right_moto();
-
- // if(ms_count++ >= 100)
- // {
- // ms_count = 0;
-
- if(Left_2_led==0&&Right_1_led==0)
- {
- Left_moto_go1;
- Right_moto_go1 ; //��늙C(j��)��ǰ��
- }
-
- else
- {
- if(Right_1_led==1&&Left_2_led==0) //��߅�z�y(c��)���ھ�
- {
- // rightrun(); //���D(zhu��n)
- Left_moto_go1 ; //��늙C(j��)��ǰ��
- Right_moto_back1 ; //��늙C(j��)��ǰ��
- }
-
- if(Left_2_led==1&&Right_1_led==0) //��߅�z�y(c��)���ھ�
- {
-
- // leftrun(); //���D(zhu��n)
- ����������������
- �����������ڱ���ƪ�� ���´��aՈ(q��ng)��51�����d������������
������Word��ʽ�ęn51�����d��ַ����(n��i)�������DƬ����
 WiFi����С܇2.docx
(420.06 KB, ���d��(sh��): 31)
WiFi����С܇2.docx
(420.06 KB, ���d��(sh��): 31)
2018-5-26 09:35 �ς�
�c(di��n)���ļ������d����
| 

 ����TQQ:125739409;���g(sh��)����QQȺ281945664
����TQQ:125739409;���g(sh��)����QQȺ281945664