|
���چ�Ƭ�C(j��)�����܉����z�y(c��)ϵ�y(t��ng)���O(sh��)Ӌ(j��)
ժҪ
�����ǹ��I(y��)���a(ch��n)�^���е���Ҫ����(sh��)֮һ�������ęz�y(c��)������DZ��C���a(ch��n)���O(sh��)�䰲ȫ�\(y��n)�бز����ٵėl������(sh��)�F(xi��n)���ܻ������z�y(c��)ϵ�y(t��ng)��(du��)���I(y��)�^�̵Ŀ��ƾ��зdz���Ҫ�����x�����O(sh��)Ӌ(j��)��Ҫͨ�^��Ƭ�C(j��)������оƬ��(du��)���������y(c��)�õ�ģ�M��̖(h��o)�M(j��n)��̎��,ʹ��������ܻ����ܡ���B�����܉�������������·��Ӳ���O(sh��)Ӌ(j��),������(j��)Ӳ���M(j��n)����ܛ�����̡�
�����O(sh��)Ӌ(j��)�ǻ���AT89C51��Ƭ�C(j��)�Ĝy(c��)���c�@ʾ����ͨ�^�����������������D(zhu��n)�Q�����̖(h��o)���ٽ�(j��ng)�^�\(y��n)��Ŵ����M(j��n)����̖(h��o)�Ŵ�����8λA��D�D(zhu��n)�Q����Ȼ��ģ�M��̖(h��o)�D(zhu��n)�Q�Ɇ�Ƭ�C(j��)�����R(sh��)�e�Ĕ�(sh��)����̖(h��o)���ٽ�(j��ng)��Ƭ�C(j��)�D(zhu��n)�Q��LED�@ʾ�������R(sh��)�e����Ϣ������@ʾݔ���������@ʾ���^����ͨ�^�I�P����Ӌ(j��)��C(j��)ϵ�y(t��ng)ݔ����N��(sh��)��(j��)�������Ƭ�C(j��)ϵ�y(t��ng)̎���A(y��)���Ĺ��ܠ�B(t��i)���@ʾ��Ҫ��ֵ��
���O(sh��)Ӌ(j��)����K�Y(ji��)���ǣ���ܛ�����d��Ӳ�����{(di��o)ԇ��������Ҫ�@ʾ�Ĕ�(sh��)��(j��)����(d��ng)ݔ���ģ�M��̖(h��o)�l(f��)��׃���ĕr(sh��)��ͨ�^A/D�D(zhu��n)�Q��LED���@ʾ��ͬ�Ĕ�(sh��)ֵ��
Ŀ�
ժҪ
Abstract
��һ�� �wՓ
11 �����
12 ���چ�Ƭ�C(j��)�����܉����z�y(c��)��ԭ��
121 �����ĸ���
122 �y(c��)�����������x
�ڶ��� ���چ�Ƭ�C(j��)�����܉����z�y(c��)ϵ�y(t��ng)��Ӳ���O(sh��)Ӌ(j��)
21 ����������
211 �������������x��
212������葪(y��ng)׃Ƭ�Ĺ���ԭ��
213����葪(y��ng)׃Ƭ�Ļ����Y(ji��)��(g��u)
214 ��葪(y��ng)׃Ƭ�Ĝy(c��)���·
22 ��̖(h��o)�Ŵ��·
212 �Ŵ������x��
224 ���\(y��n)�Ŵ��·
23 A/D�D(zhu��n)�Q��
231 A/D�D(zhu��n)�Qģ�K�����x��
232 A/D�D(zhu��n)�Q���ĺ�(ji��n)��
233 ����λ�f��
234 ADC0832�����r(sh��)��D
233 ��Ƭ�C(j��)��(du��)ADC0832�Ŀ���ԭ��
24 ��Ƭ�C(j��)
241 AT89C51��Ƭ�C(j��)��(ji��n)��
242��Ҫ����
243 ���_�f��
245 оƬ����
25 ��Ƭ�C(j��)���I�P�Ľӿڼ��g(sh��)
251 �I�P���ܼ��Y(ji��)��(g��u)����
252 �I�P����(d��ng)��ȥ��
253 ��Ƭ�C(j��)�c�I�P���B��
26 LED�@ʾ�ӿ�
261�l(f��)����O�ܼ�LED�@ʾ��
262�߶Δ�(sh��)�a�@ʾ��
263 LED��(sh��)�a���o�B(t��i)�@ʾ�ӿ�
������ ܛ���O(sh��)Ӌ(j��)
31 A/D�D(zhu��n)�Q����ܛ���O(sh��)Ӌ(j��)
311 ADC0832оƬ�ӿڳ���ľ���
32 ��Ƭ�C(j��)�c�I�P�Ľӿڳ����O(sh��)Ӌ(j��)
34 LED��(sh��)�a���@ʾ�����O(sh��)Ӌ(j��)
������ ���Y(ji��)
�����īI(xi��n)
���A
���B
���x
��һ�� �wՓ
1.1 �о�������������S����Ӌ(j��)��C(j��)�İl(f��)չ�����đ�(y��ng)�����˂��Ĺ������ճ�������Խ��Խ�ձ顣���I(y��)�^�̿�����Ӌ(j��)��C(j��)��һ��(g��)��Ҫ��(y��ng)���I(l��ng)�������Ɇ�Ƭ�C(j��)��(g��u)�ɵ�Ƕ��ʽϵ�y(t��ng)�ѽ�(j��ng)Խ��Խ�ܵ��˂����P(gu��n)ע���F(xi��n)�ڿ��Ժ����䏈���f���]����Ӌ(j��)��C(j��)�ăx�����ܷQ�����M(j��n)�ăx�����]����Ӌ(j��)��C(j��)�Ŀ���ϵ�y(t��ng)���ܷQ���F(xi��n)������ϵ�y(t��ng)�ĕr(sh��)���ѽ�(j��ng)������ �����y(c��)����(du��)��(sh��)�r(sh��)�O(ji��n)�y(c��)�Ͱ�ȫ���a(ch��n)������Ҫ�����x���ڹ��I(y��)���a(ch��n)�У����˸�Ч����ȫ���a(ch��n)�������Ч�������a(ch��n)�^���е��T�牺�����������ضȵ���Ҫ����(sh��)�����ډ������������a(ch��n)�^���������Q���Եİ�ȫ���ã�����б�Ҫ��(zh��n)�_�y(c��)�����������˜y(c��)����ͬλ�õĉ���ֵ�������O(sh��)Ӌ(j��)����چ�Ƭ�C(j��)���܉����y(c��)��ϵ�y(t��ng)��ͨ�^��������������Ҫ�y(c��)����λ�õĉ�����̖(h��o)�D(zhu��n)�������̖(h��o)���ٽ�(j��ng)�^�\(y��n)��Ŵ����M(j��n)����̖(h��o)�Ŵ�����8λA��D�D(zhu��n)�Q����Ȼ��ģ�M��̖(h��o)�D(zhu��n)�Q�Ɇ�Ƭ�C(j��)�����R(sh��)�e�Ĕ�(sh��)����̖(h��o)���ٽ�(j��ng)��Ƭ�C(j��)�D(zhu��n)�Q��LED�@ʾ�������R(sh��)�e����Ϣ������@ʾݔ�������چ�Ƭ�C(j��)�����܉����z�y(c��)ϵ�y(t��ng)���x��Ć�Ƭ�C(j��)�ǻ���AT89C51��Ƭ�C(j��)�Ĝy(c��)���c�@ʾ����������(j��ng)�^����������׃?y��u)�����?h��o)����ͨ�^���\(y��n)�ŷŌ����̖(h��o)�Ŵ���(bi��o)��(zh��n)��̖(h��o)��0-5V��늉���̖(h��o)��Ȼ���M(j��n)��A/D�D(zhu��n)�Q����ģ�M���D(zhu��n)�Q�锵(sh��)�������҂����ɘӵ�A/D�D(zhu��n)�Q����ADC0832��ADC0832��8λ�ֱ���A/D�D(zhu��n)�QоƬ������߷ֱ���_(d��)256��(j��)�������m��(y��ng)һ���ģ�M���D(zhu��n)�QҪ�����(n��i)���Դݔ���c����늉��ď�(f��)�ã�ʹ��оƬ��ģ�M늉�ݔ����0~5V֮�g��оƬ�D(zhu��n)�Q�r(sh��)�g�H��32��S����(j��)���p��(sh��)��(j��)ݔ�������锵(sh��)��(j��)У�(y��n)���Ԝp�ٔ�(sh��)��(j��)�`��D(zhu��n)�Q�ٶȿ��ҷ�(w��n)������(qi��ng)����(d��)����оƬʹ��ݔ�룬ʹ��������Ӻ�̎��������׃�ĸ��ӷ��㡣ͨ�^DI��(sh��)��(j��)ݔ��ˣ������p�Č�(sh��)�F(xi��n)ͨ�����ܵ��x�� ������r��ADC0832�c��Ƭ�C(j��)�Ľӿڑ�(y��ng)��4�l��(sh��)��(j��)�����քe��CS��CLK��DO��DI��������DO���cDI����ͨ�ŕr(sh��)��δͬ�r(sh��)��Ч���c��Ƭ�C(j��)�Ľӿ����p��ģ������·�O(sh��)Ӌ(j��)�r(sh��)���Ԍ�DO��DI��(li��n)��һ����(sh��)��(j��)����ʹ�á� ������߆�Ƭ�C(j��)ϵ�y(t��ng)I/O�ھ�������Ч��,���Æ�Ƭ�C(j��)AT87C51�Ĵ��пںʹ�����λ�Ĵ���74LS164�U(ku��)չݔ����λLED�@ʾ. �I�P�dž�Ƭ�C(j��)ϵ�y(t��ng)��(sh��)�F(xi��n)�˙C(j��)��(du��)Ԓ�ij���ݔ���O(sh��)�䡣�҂�ͨ�^�I�P����Ӌ(j��)��C(j��)ϵ�y(t��ng)ݔ����N��(sh��)��(j��)��������ͨ�^ʹ���I�P����Ƭ�C(j��)ϵ�y(t��ng)̎���A(y��)���Ĺ��ܠ�B(t��i)��Ҫ�댍(sh��)�F(xi��n)�������@ʾ��Ӳ���cܛ����ϣ���K�{(di��o)ԇ������ 1.2 ���چ�Ƭ�C(j��)�����܉����z�y(c��)��ԭ�� �����O(sh��)Ӌ(j��)���Ԇ�Ƭ�C(j��)�M�ɵĉ����y(c��)����ϵ�y(t��ng)�б����ǰ��ͨ���������̖(h��o)��ݔ��ͨ�����Á��ɼ�ݔ����Ϣ�������Ĝy(c��)������Ҫ�����������Â������������D(zhu��n)�Q�����̖(h��o)���ٽ�(j��ng)�Ŵ�(j��ng)A/D�D(zhu��n)�Q�锵(sh��)�����������Ӌ(j��)��C(j��)�M(j��n)����Ч̎����Ȼ����LED�M(j��n)���@ʾ�����I�P�������Ǹ�׃ݔ������ϵ��(sh��)�ġ�����ԭ��D��D1.1��ʾ�� 
�D1.1 �����y(c��)��?j��)x��ԭ������D
�҂��@����Ҫ������A/D�D(zhu��n)�Q����Ƭ�C(j��)�I�P���@ʾ���҂��x�õ�A/D�D(zhu��n)�Q����ADC0832����Ƭ�C(j��)��AT89C51���I�P��4��4���I�P���@ʾ��4λ��(sh��)�a���@ʾ������(j��)Ӳ���·���̣��{(di��o)ԇ�������@ʾ�Y(ji��)���� 1.2.1 �����ĸ��������ǹ��I(y��)���a(ch��n)�е���Ҫ����(sh��)֮һ�����˱��C���a(ch��n)�����\(y��n)�У���회�(du��)�����M(j��n)�Мy(c��)���Ϳ��ƣ������f�����ǣ��@�����f�ĉ�������(sh��)�H�������������еĉ���(qi��ng)������ֱ�����چ�λ��e�ϵ����� �ډ����y(c��)���У����ý^��(du��)�������퉺����ؓ(f��)��������ն�֮�֡����^�^��(du��)������ָ���y(c��)���|(zh��)������������λ��e�ϵ�ȫ���������÷�̖(h��o)pj��ʾ���Á�y(c��)���^��(du��)�����ăx���Q��^��(du��)�������������ϵĿ՚������a(ch��n)����ƽ�������Q���≺�����÷�̖(h��o)pq��ʾ���Á�y(c��)�����≺���ăx���К≺�����^��(du��)�����c��≺��֮��Q��퉺�����÷�̖(h��o)pb��ʾ����pb=pj-pq����(d��ng)�^��(du��)����ֵС�ڴ�≺��ֵ�r(sh��)���퉺����ؓ(f��)ֵ����ؓ(f��)����������ؓ(f��)����ֵ�Ľ^��(du��)ֵ���Q����նȣ��÷�̖(h��o)pz��ʾ�� �����ǹ��I(y��)���a(ch��n)�е���Ҫ����(sh��)����߉������ĉ������^�~��ֵ�r(sh��)���Dz���ȫ�ģ�����M(j��n)�Мy(c��)���Ϳ��ơ���ijЩ���I(y��)���a(ch��n)�^���У�����߀ֱ��Ӱ푮a(ch��n)Ʒ���|(zh��)�������a(ch��n)Ч�ʣ������a(ch��n)�ϳɰ��r(sh��)�����͚䲻�H���һ���ĉ����ºϳɣ����҉����Ĵ�Сֱ��Ӱ푮a(ch��n)���ߵ͡����⣬��һ���ėl���£��y(c��)������߀���g�ӵó��ضȡ�������Һλ�ȅ���(sh��)�� 1643�꣬�����������������Ȝy(c��)����(bi��o)��(zh��n)�Ĵ�≺��ֵ��760���������춨��Һ��ʽ�����y(c��)��?j��)x���Ļ��A(ch��)��1847�꣬�����˲����Ƴɲ��ǹ܉����������ڽY(ji��)��(g��u)��(ji��n)�Ρ���(sh��)�ã��ܿ��ڹ��I(y��)�Ы@�ÏV����(y��ng)�ã�һֱ�dz��õĉ����y(c��)��?j��)x���� ��ʮ���o(j��)�ϰ��~���F(xi��n)���h(yu��n)����������늽��c(di��n)���������Ķ���Q�ˉ����y(c��)��ֵ���h(yu��n)���x���ͺ͉����Ĉ�(b��o)�������ƵȆ��}��60����Ժ��m��(y��ng)���I(y��)���ơ����չ��I(y��)���t(y��)�W(xu��)�y(c��)ԇ�ȷ����Ҫ�����y(c��)��?j��)x���������w�e�p�ɡ��ߜء��͛_���������(d��ng)�͔�(sh��)���@ʾ�ȷ���l(f��)չ�� 1.2.2 �y(c��)�����������x�������^�����a(ch��n)���Ĵ���Ҫ����(sh��)֮һ�����ڙz�y(c��)���a(ch��n)�^���ܷ���ȫ�ɿ������\(y��n)�е���Ҫ����(sh��)ָ��(bi��o)�������ڻ������a(ch��n)�^���Љ����@һ����(sh��)���@���Ȟ���Ҫ�� �ڻ������a(ch��n)�^���У�������Ӱ�����ƽ�⣬ҲӰ푻��W(xu��)����(y��ng)���٣��ǘ�(bi��o)־���a(ch��n)�^���ܷ������M(j��n)�е���Ҫ����(sh��)�� ��ȫ���a(ch��n)����Ҫ���Ĵ_����ȫ���a(ch��n)�ĽǶȣ������z�y(c��)Ҳ�Ƿdz���Ҫ�ġ��磺�_������������(n��i)�ĉ����ڰ�ȫָ��(bi��o)֮��(n��i)���_����ȼ�ױ����|(zh��)�ĉ���������(bi��o)�� ���������I(y��)���a(ch��n)�Љ����z�y(c��)�ڿ���Ҳ�dz���Ҫ������Ҋ��һЩ���I(y��)�b���϶��Љ��������磺��������,��(d��ng)�����^�����ױ�ը�������̈́�(d��ng)�����㣻߀�Рt�ʼn�����һ��S����0mmH2O,���ˠt�T�pð���m�������Ń�(n��i)���F(xi��n)ؓ(f��)�����͜ضȡ����S����10 mmH2O����(ji��)��20%�� ����Ҳ���g�Ӝy(c��)����λ���ֶΣ��ÿװ�y(c��)������?j��)H�ܮa(ch��n)��������@��(g��)���?j��)����z�y(c��)�ķ�����y(c��)ȡ������K���������Һ��ĸ߶ȿ��Կ��y(c��)ȡ�����Ĵ�С����ʾ�� ��֮�������z�y(c��)��һ��ɮa(ch��n)�^��������ȱ�ٵĭh(hu��n)��(ji��)��ֻ�а���ˇҪ�։����ķ�(w��n)�������ܾS�����a(ch��n)�������M(j��n)�С����ԉ�����(zh��n)�_�y(c��)���ڌ�(sh��)�H�^���Ƿdz���Ҫ�ġ�
�ڶ��� ���چ�Ƭ�C(j��)�����܉����z�y(c��)ϵ�y(t��ng)��Ӳ���O(sh��)Ӌ(j��)
2.1 ����������
2.1.1 �������������x�������������lj����z�y(c��)ϵ�y(t��ng)�е���Ҫ�M�ɲ��֣��ɸ��N��������Ԫ�������y(c��)������̖(h��o)�D(zhu��n)�Q�����לy(c��)�������̖(h��o)��ݔ�����o�@ʾ�x���@ʾ����ֵ�����ƺ͈�(b��o)��ʹ�á����W(xu��)�������ķN��࣬����葪(y��ng)׃Ƭ�������������댧(d��o)�w��(y��ng)׃Ƭ����������������ʽ������������늸�ʽ���������������ʽ�����������C��ʽ���������������ʽ���ٶȂ������ȡ� ����葪(y��ng)׃ʽ�����������ƾõĚvʷ�����������нY(ji��)��(g��u)��(ji��n)�Ρ��w�eС��ʹ�÷��㡢���ܷ�(w��n)�����ɿ����`���ȸ߄�(d��ng)�B(t��i)푑�(y��ng)�졢�m���o�B(t��i)����(d��ng)�B(t��i)�y(c��)�����y(c��)�����ȸߵ��T����(y��u)�c(di��n)�������Ŀǰ��(y��ng)����V���Ă�����֮һ����葪(y��ng)׃ʽ�������ɏ���Ԫ������葪(y��ng)׃Ƭ��(g��u)�ɣ���(d��ng)����Ԫ�����ܵ��������r(sh��)�������a(ch��n)����(y��ng)׃��ճ�N�ڏ���Ԫ���������葪(y��ng)׃Ƭ�����ֵ���S������Ԫ���đ�(y��ng)׃������(y��ng)׃����ͨ�^�y(c��)����葪(y��ng)׃Ƭ�����ֵ׃���������Á�y(c��)��λ�Ƽ��ٶȡ��������ء������ȸ��N����(sh��)�� 2.1.2������葪(y��ng)׃Ƭ�Ĺ���ԭ����(y��ng)׃ʽ�����������ǰщ�����׃���D(zhu��n)�Q�����ֵ��׃�����M(j��n)�Мy(c��)���ģ���(y��ng)׃Ƭ���ɽ��ٌ�(d��o)�w��댧(d��o)�w�Ƴɵ�����w����һ�N�����y(c��)���ϵđ�(y��ng)׃׃���D(zhu��n)�Q�ɞ�һ�N���̖(h��o)���������������lj���ʽ��(y��ng)׃����������Ҫ�M�ɲ���֮һ����葪(y��ng)׃Ƭ��(y��ng)�������ǽ�����葪(y��ng)׃Ƭ�Ͱ댧(d��o)�w��(y��ng)׃Ƭ�ɷN��������葪(y��ng)׃Ƭ���нz�(y��ng)׃Ƭ�ͽ��ٲ��(y��ng)׃Ƭ�ɷN��ͨ���nj���(y��ng)׃Ƭͨ�^�����ճ�̈́��o�ܵ�ճ���ڮa(ch��n)�����W(xu��)��(y��ng)׃���w�ϣ���(d��ng)���w�����l(f��)����(y��ng)��׃���r(sh��)����葪(y��ng)׃ƬҲһ��a(ch��n)����׃��ʹ��(y��ng)׃Ƭ����ֵ�l(f��)����׃���Ķ�ʹ��������ϵ�늉��l(f��)��׃�����@�N��(y��ng)׃Ƭ�������r(sh��)�a(ch��n)������ֵ׃��ͨ���^С��һ���@�N��(y��ng)׃Ƭ���M�ɑ�(y��ng)׃늘�ͨ�^���m(x��)�ăx���Ŵ����M(j��n)�зŴ��ق�ݔ�o̎���·��ͨ����A/D�D(zhu��n)�Q��CPU���@ʾ���(zh��)�ЙC(j��)��(g��u)������ֵ�S�������a(ch��n)���đ�(y��ng)׃��׃����������葪(y��ng)׃Ƭ�Ĺ���ԭ���������ڻ��w�����ϑ�(y��ng)׃����S�C(j��)е��׃���a(ch��n)����ֵ׃���ĬF(xi��n)��,�Q����葪(y��ng)׃Ч��(y��ng)����(du��)�ڽ��ٌ�(d��o)�w����D2.1��ʾ��һ�ΈA����Č�(d��o)���Ľ��ٽz,�O(sh��)���L(zh��ng)��L(zh��ng),����e��A��ֱ����D�� ,ԭʼ����R�����ٌ�(d��o)�w�����ֵ������ʽ��ʾ�� R=��L�MA (2.1) ʽ�У��ѡ������ٌ�(d��o)�w������ʣ�����cm2/m�� S������(d��o)�w�Ľ���e��cm2�� L������(d��o)�w���L(zh��ng)�ȣ�m�� 
�D2.1 �������z��(y��ng)׃Ч��(y��ng) ��(d��ng)���ٽz�ܵ��S���� F��������s�a(ch��n)����׃ ,�����ֵ��(hu��)�S֮׃�� ,ͨ�^��(du��)��2.1��ʽ��߅ȡ��(du��)��(sh��)����ȡȫ�ֵ�:  ��2.2�� ��2.2�� ʽ�� ������S��(y��ng)׃ ,�� ������S��(y��ng)׃ ,��  ����(j��)�������W(xu��) ,�ڽ��ٽz����������B(t��i)�� ,�� ����(j��)�������W(xu��) ,�ڽ��ٽz����������B(t��i)�� ,��  (2.3) (2.3)
ʽ�Ц̞錧(d��o)�w���ϵIJ��ɱȡ���� ,�� 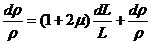 (2.4) (2.4)
ԇ�(y��n)�l(f��)�F(xi��n) ,���ٲ�������ʵ�����(du��)׃���c���w������(du��)׃���g���P(gu��n)ϵ��  (2.5) (2.5)
ʽ�� , c�鳣��(sh��)(��һ���IJ��Ϻͼӹ���ʽ?j��ng)Q��) ��ʽ (2.5)���� (2.4) ,�Ү�(d��ng)��R=R�r(sh��) ,�ɵ� ��ʽ (2.5)���� (2.4) ,�Ү�(d��ng)��R=R�r(sh��) ,�ɵ�  (2.6) (2.6)
ʽ�У�k=(1+2µ)+c(1-2µ)����ٽz���ϵđ�(y��ng)׃�`��ϵ��(sh��)�� ��ʽ���� ,���ٲ�����������(du��)׃���c�侀��(y��ng)׃�����ȡ��@���ǽ��ٲ��ϵđ�(y��ng)׃���Ч��(y��ng)�� ���׃���� ��R/R �ı��_(d��)ʽ�飺K=��R/Rµ/�ţ�ʽ�Ц̡����ϵIJ���ϵ��(sh��)���š���(y��ng)׃���� ��(d��ng)���ٽz���������Õr(sh��)�����L(zh��ng)�Ⱥͽ���e����(hu��)�l(f��)��׃��������ʽ�пɺ��������������ֵ����(hu��)�l(f��)����׃��������ٽz���������ö����L(zh��ng)�r(sh��)�����L(zh��ng)�����ӣ�������e�p�٣����ֵ���(hu��)����(d��ng)���ٽz���������ö����s�r(sh��)���L(zh��ng)�ȜpС���������ӣ����ֵ�t��(hu��)�pС��ֻҪ�y(c��)����������׃����ͨ���ǜy(c��)�����ɶ˵�늉��������ɫ@�Ñ�(y��ng)׃���ٽz�đ�(y��ng)׃�顣 2.1.3����葪(y��ng)׃Ƭ�Ļ����Y(ji��)��(g��u)��葪(y��ng)׃Ƭ��Ҫ���IJ��ֽM�ɡ���D 2.2��ʾ ,���z�Ǒ�(y��ng)׃Ƭ����Ԫ��;��Ƭ�����wƬ��λ�ͱ��o(h��)���z������,��ʹ���z�ͱ��y(c��)ԇ��֮�g�^��;�� ���������B�Ӝy(c��)����(d��o)���� 
�D 2.2����葪(y��ng)׃Ƭ�Ļ����Y(ji��)��(g��u) 2.1.4 ��葪(y��ng)׃Ƭ�Ĝy(c��)���·��(y��ng)׃Ƭ���Ԍ���(y��ng)׃�D(zhu��n)�Q������׃���������@ʾ��ӛ䛑�(y��ng)׃�Ĵ�С��߀Ҫ������׃�����D(zhu��n)�Q��늉��������׃���������Ҫ�Ќ��õĜy(c��)���·��ͨ������ֱ��늘�ͽ���늘� 2.1.4.1늘��·�Ĺ���ԭ�����ڑ�(y��ng)׃Ƭ��늘��·��ݔ����̖(h��o)һ����^��������Ŀǰ����葪(y��ng)׃ʽ��������늘�ݔ�����cֱ���Ŵ������B����D2.3��ʾ�� 
�D2.3ֱ��늘� �O(sh��)늘�ĸ��۵����քe��R1R3R2R4 ��������ȫ�����Ǒ�(y��ng)׃Ƭ������ֱ���Ŵ�����ݔ������늘�����Ķ࣬��˿Ɍ�늘�ݔ���˿����_·���@�N늘�ɞ�늉�ݔ����ݔ��늉�U0�� U0=  ��2.7�� ��2.7�� ����ʽ��Ҋ����R1R3=R2R4���tݔ��늉��؞��㣬�˕r(sh��)늘�̎��ƽ���B(t��i)���Q��ƽ��늘� ƽ��늘��ƽ��l���飺 R1R3=R2R4 ��(y��ng)׃Ƭ�����r(sh��)�������׃����R���˕r(sh��)�в�ƽ��늉�ݔ����   ��2.8�� ��2.8��
��ʽ��2.8����������R�� R1 �r(sh��)��늘��ݔ��늉��ڑ�(y��ng)׃�ɾ����P(gu��n)ϵ���������ɘ�۵đ�(y��ng)׃�O��һ�£���ͬ������(y��ng)׃���(y��ng)׃�r(sh��)��ݔ��늉������֮�����ͬ�r(sh��)���tݔ��늉������֮�͡�������(du��)�ɘ�۵ĘO��һֱ��ݔ��늉������֮�ͣ���֮�t�����֮� 늘��늉�UԽ�ߣ�ݔ��늉�U0 Խ���ǣ���(d��ng)U��r(sh��)����葪(y��ng)׃Ƭͨ�^�����Ҳ�������^��葪(y��ng)׃Ƭ�����Sͨ�^�������������������͕�(hu��)���F(xi��n)��׃����Ư�������@Щԭ����Ժ������M(j��n)�Мض��a(b��)������߂������Ĝy(c��)���`���ȡ� 2.1.4.2 �Ǿ����`��ض��a(b��)����ʽ��2.8���ľ����P(gu��n)ϵ���ڑ�(y��ng)׃Ƭ�ą���(sh��)׃����С���O��R�� R1 ����r�µó��ģ�����(y��ng)׃Ƭ���ܵĉ���̫�t�������O(sh��)��������늘��ݔ��늉���(y��ng)׃֮�g�ɷǾ����P(gu��n)ϵ�������@�N��r�£��ð������P(gu��n)ϵ�̶ȵăx���M(j��n)�Мy(c��)����Ȼ�����Ǿ����`����������Ǿ����`��ڌ�(sh��)�H��(y��ng)���У������ð����(d��ng)��ȫ����(d��ng)�·����D2.4��ʾ���Ը��ƷǾ����`������ݔ���`���ȡ�  
UU (a)�����(d��ng)�· ��b�� ȫ����(d��ng)�· �D2.4 ���(d��ng)늘�
�D2.4��a��������(d��ng)�·���ڂ������@�н�(j��ng)��ʹ���@�N������ճ�N��(y��ng)׃Ƭ�r(sh��)��ʹ�ɂ�(g��)��(y��ng)׃Ƭһ��(g��)�܉���һ��(g��)��������(y��ng)׃��̖(h��o)�෴�������r(sh��)���ɂ�(g��)��(y��ng)׃Ƭ����늘�������ɱۡ��O(sh��)늘��ڳ�ʼ�r(sh��)��ʾƽ��ģ��Ҟ�ȱ�늘��]����R=��R1=��R2 �t�ð����(d��ng)�·��ݔ��늉���  ��2.9�� ��2.9��
����ʽ��Ҋ�������(d��ng)�·���H���������Ǿ����`�����߀ʹ늘��ݔ���`���������һ����ͬ�r(sh��)߀���ض��a(b��)��?sh��)����á�������D2.4��b����ʾ��(g��u)��ȫ����(d��ng)�·ͬ�ӿ��]�� ��R=��R1=��R2=��R3=��R4�r(sh��)��ȫ����(d��ng)�·��ݔ��늉���  ��2.10�� ��2.10�� ��Ҋ��ȫ���늉��`���ȱȆα۹����r(sh��)���`���������4���Ǿ����`��Ҳ�õ���������ͬ�r(sh��)߀���Мض��a(b��)��?sh��)����ã�ԓ�·Ҳ�õ��ˏV���đ�(y��ng)�á� 2.2 ��̖(h��o)�Ŵ��·2.1.2 �Ŵ������x�����y(c��)�ķ������(j��ng)�������õ������̖(h��o)���Ⱥ�С���o���M(j��n)��A/D�D(zhu��n)�Q����회�(du��)�@Щģ�M���̖(h��o)�M(j��n)�зŴ�̎������ʹ�·��(ji��n)�α����{(di��o)ԇ�����O(sh��)Ӌ(j��)�������\(y��n)��Ŵ�������?y��n)��ھ����^��ģ늉��ėl���£��x���Ŵ����܉�?q��)������IJ��늉����?h��o)�M(j��n)�зŴ��Ҿ��кܸߵ�ݔ���迹���@Щ����ʹ���ܵ�������(y��ng)�õĚgӭ���V�����ڜy(c��)�������͜ضȵđ�(y��ng)׃�x늘�ӿڡ������ضșz�y(c��)���N��߅����߅����z�y(c��)�� 2.2.4 ���\(y��n)�Ŵ��·�����O(sh��)Ӌ(j��)�ķŴ������������\(y��n)�ţ���?y��n)������и߹�ģ���ƱȵķŴ��·����������(g��)�����\(y��n)��Ŵ����M�ɣ���D2.5��ʾ�� 
2.5 ���\(y��n)�Ÿ߹������ƱȷŴ��· ����A1��A2��ɂ�(g��)����һ��(��Ҫָݔ���迹����ģ���ƱȺ�����)��ͬ��ݔ��ͨ�ü����\(y��n)��Ŵ�������(g��u)��ƽ�⌦(du��)�Q���(d��ng)�Ŵ�ݔ�뼉(j��)��A3��(g��u)���p��ݔ��ζ�ݔ����ݔ����(j��)���Á��M(j��n)һ������A1��A2�Ĺ�ģ��̖(h��o)�����m��(y��ng)�ӵ�ؓ(f��)�d����Ҫ������ÿ��(g��)�Ŵ�������c(di��n)��늉�����ʩ���ڸ�����ݔ��˵�늉�����ˣ�����(g��)���ݔ��늉��F(xi��n)�ڶ��ʬF(xi��n)��RG�ɶˡ���?y��n)�ݔ��늉��?j��ng)�^�Ŵ����A1 ��A2��ݔ���ˣ��IJ��늉��ʬF(xi��n)��R5��RG��R6�@��ֻ����ϣ����Բ���������ͨ�^�H��׃RG�M(j��n)���{(di��o)���� �@�N�B��������һ��(g��)��(y��u)�c(di��n)��һ���@��(g��)�p�����·�������ñ���ƥ���������O(sh��)�����ڸ�׃?c��)���r(sh��)���ٌ�(du��)���ƥ�����κ�Ҫ�����R5 �� R6��R1�� R3��R2 �� R4���tVOUT = (VIN2��VIN1)(1��2R5/RG)��R2/R1���� ����RG�ɶ˵�늉�����VIN���������^RG���������VIN/RG�����ݔ����̖(h��o)��ͨ�^A1 ��A2 �@�����沢�õ��Ŵ�Ȼ���ע����nj�(du��)�ӵ��Ŵ���ݔ��˵Ĺ�ģ늉���RG�ɶ˾�����ͬ���λ���Ķ�����(hu��)��RG�Ϯa(ch��n)����������ڛ]��������^RG��Ҳ�͟o������^R5��R6�����Ŵ���A1 ��A2 �������λ������S������������ˣ���ģ��̖(h��o)���Ԇ�λ����ͨ�^ݔ�뾏�_���������늉�������1����2 RF/RG����������ϵ��(sh��)���Ŵ��@Ҳ����ζ��ԓ�·�Ĺ�ģ���Ʊ�����cԭ���IJ���·�����ˡ�1����2 RF/RG��������
����Փ�ϱ������õ���Ҫ���ǰ�����棨��RG��Q�������������ӹ�ģ������`��������̖(h��o)��������ɱ������ӣ�����ģ�`��t��Ȼ�����Ա��ʡ����棨���ݔ��늉���/����ģ�`��늉��������������CMR��Փ��ֱ���c����ɱ������ӣ��@��һ��(g��)�dz����õ����ԡ�
������ڽY(ji��)��(g��u)�ϵČ�(du��)�Q�ԣ�ݔ��Ŵ����Ĺ�ģ�`����������ۙ������ݔ����(j��)�Ĝp�����������@�����T�繲ģ�����S�l��׃�Q���`� 2.3 A/D�D(zhu��n)�Q��ģ�M��ݔ��ͨ�����΄�(w��)�nj�ģ�M���D(zhu��n)�Q�ɔ�(sh��)�������܉�����@һ�΄�(w��)�������Q֮��ģ��(sh��)�D(zhu��n)�Q������(ji��n)�QA/D�D(zhu��n)�Q���������O(sh��)Ӌ(j��)����A/D�D(zhu��n)�Q�����΄�(w��)�nj��Ŵ���ݔ����ģ�M��̖(h��o)�D(zhu��n)�Qλ��(sh��)�����M(j��n)��ݔ���� 2.3.1 A/D�D(zhu��n)�Qģ�K�����x��Ŀǰ��Ƭ�C(j��)����Ӯa(ch��n)Ʒ���ѵõ��V����(y��ng)�ã��S����͵Ć�Ƭ�C(j��)��(n��i)���ю���A/D�D(zhu��n)�Q�·�������Ƭ�C(j��)��(hu��)�ȟoA/D�D(zhu��n)�Q���ܵĆ�Ƭ�C(j��)�ڃr(ji��)���ϸߎ�Ԫ�����ܶ࣬�҂�����һ��(g��)��ͨ�Ć�Ƭ�C(j��)����һ��(g��)A/D�D(zhu��n)�Q������(sh��)�F(xi��n)A/D�D(zhu��n)�Q�Ĺ��ܣ��@��A/D�D(zhu��n)�Q�����xADC0832��ADC0809�ȣ����кͲ��нӿ�ģʽ��A/D�D(zhu��n)�Q���T�����е�һ�N�����s�Ǒ�(y��ng)���������x���һ��(g��)��Ҫָ��(bi��o)����ͬ�ӵ��D(zhu��n)�Q�ֱ��ʼ��D(zhu��n)�Q�ٶȵ�ǰ���£���ͬ�Ľӿڷ�ʽ��(hu��)��(du��)�·�Y(ji��)��(g��u)���������ڮa(ch��n)��Ӱ푡���(du��)A/D�D(zhu��n)�Q�����x���҂�ͨ�^���^ADC0809��ADC0832��Q�����@�ɂ�(g��)�D(zhu��n)�Q�����dz�Ҋ��A/D�D(zhu��n)�Q��������ADC0809�IJ��нӿ�A/D�D(zhu��n)�Q����ADC0832�Ǵ��нӿ�A/D�D(zhu��n)�Q�����҂��������O(sh��)Ӌ(j��)�x��ADC0832��A/D�D(zhu��n)�Q�چ�Ƭ�C(j��)�ӿ��Б�(y��ng)�ÏV�� ,���� A/D�D(zhu��n)�Q�����й��ĵ͡��ԃr(ji��)���^�ߡ�оƬ���_�ٵ����c(di��n)�� 2.3.2 A/D�D(zhu��n)�Q���ĺ�(ji��n)�����@���O(sh��)Ӌ(j��)���҂�A/D�D(zhu��n)�Q���x�Ã�ͨ��ݔ��İ�λADC0832��ADC0832[3]���������Ұ댧(d��o)�w��˾���a(ch��n)��һ�N8 λ�ֱ��ʡ��pͨ��A/D�D(zhu��n)�QоƬ���������w�eС�������ԏ�(qi��ng)���ԃr(ji��)�ȸ߶����܆�Ƭ�C(j��)�ۺ�����I(y��)�gӭ����Ŀǰ�ѽ�(j��ng)�кܸߵ��ռ��ʡ�ADC0832 ��8λ�ֱ���A/D�D(zhu��n)�QоƬ������߷ֱ���_(d��)256��(j��)�������m��(y��ng)һ���ģ�M���D(zhu��n)�QҪ�����(n��i)���Դݔ���c����늉��ď�(f��)�ã�ʹ��оƬ��ģ�M늉�ݔ����0~5V֮�g��оƬ�D(zhu��n)�Q�r(sh��)�g�H��32��S����(j��)���p��(sh��)��(j��)ݔ�������锵(sh��)��(j��)У�(y��n)���Ԝp�ٔ�(sh��)��(j��)�`��D(zhu��n)�Q�ٶȿ��ҷ�(w��n)������(qi��ng)����(d��)����оƬʹ��ݔ�룬ʹ��������Ӻ�̎��������׃�ø��ӷ��㡣ͨ�^DI ��(sh��)��(j��)ݔ��ˣ������p�Č�(sh��)�F(xi��n)ͨ�����ܵ��x�����P(gu��n)���_�f�����£� • CS Ƭ�xʹ�ܣ����ƽоƬʹ�ܡ� • CH0 ģ�Mݔ��ͨ��0��������IN+/-ʹ�á� • CH1 ģ�Mݔ��ͨ��1��������IN+/-ʹ�á� • GND оƬ����0�λ���أ��� • DI ��(sh��)��(j��)��̖(h��o)ݔ�룬�x��ͨ�����ơ� • DO ��(sh��)��(j��)��̖(h��o)ݔ�����D(zhu��n)�Q��(sh��)��(j��)ݔ���� • CLK оƬ�r(sh��)�ݔ�롣 • Vcc/REF �Դݔ�뼰����늉�ݔ�루��(f��)�ã��� ������r��ADC0832 �c��Ƭ�C(j��)�Ľӿڑ�(y��ng)��4�l��(sh��)��(j��)�����քe��CS��CLK��DO��DI�����ĽY(ji��)��(g��u)ʾ��D��D2.6��ʾ��

�D2.6 ADC0832�Y(ji��)��(g��u)ʾ��D
2.3.3 ����λ�f��ADC0832�����r(sh��)��ģ�Mͨ�����x�ζ�ݔ��Ͳ��ݔ����x��ȡ�Q��ݔ��r(sh��)�������λ����(d��ng)��ݔ��r(sh��)��Ҫ����ݔ��ͨ���ĘO�ԣ��ɂ�(g��)ݔ��ͨ�����κ�һ��(g��)ͨ�������������O��ؓ(f��)�O��ADC0832������λ߉�����2.1��ʾ�� ��2.1������λ߉�� 
���С�+����ʾݔ��ͨ���Ķ��c(di��n)�����O�ԣ���-����ʾݔ����c(di��n)��ؓ(f��)�O��H��L��ʾ�ߡ����ƽ��ݔ������λ�r(sh��)����λ��CH0����ǰ����λ��CH1���ں� 2.3.4 ADC0832�����r(sh��)��D��(d��ng) CS�ɸ�׃�͕r(sh��)���x��ADC0832 ���ڕr(sh��)犵������أ�DI �˵Ĕ�(sh��)��(j��)���� ADC0832��(n��i)���Ķ�·��ַ��λ�Ĵ������ڵ�һ��(g��)�r(sh��)����g,DI��ߣ���ʾ����(d��ng)λ���o����ݔ���λ����λ����(d��ng)ݔ�놢��(d��ng)λ������λ���xͨݔ��ģ�Mͨ�����D(zhu��n)�Q�_ʼ���D(zhu��n)�Q�_ʼ��(j��ng)�^һ��(g��)�r(sh��)������ӽ����ڵ�һ��(g��)�r(sh��)��������t����ʹ�x����ͨ����(w��n)����ADC0832�o�����ڵ�4��(g��)�r(sh��)��½���ݔ���D(zhu��n)�Q��(sh��)��(j��)����(sh��)��(j��)ݔ���r(sh��)��ݔ�����λ��D7��D0��ݔ�����D(zhu��n)�Q�Y(ji��)�����������λ�_ʼ���±锵(sh��)��(j��)��D7��D0 �����ɴΰl(f��)�͵����λ���á���(d��ng)Ƭ�xCS��ߕr(sh��)����(n��i)�����мĴ����� ��ݔ��׃?y��u)����B(t��i)�����Ҫ���M(j��n)��һ��ģ ��(sh��)�D(zhu��n)�Q��Ƭ�x ����ٴΏĸ������׃��������ݔ�놢��(d��ng)λ������λ�� 
�D2.7 ADC083�����r(sh��)��D
2.3.3 ��Ƭ�C(j��)��(du��)ADC0832�Ŀ���ԭ��
�D2.8 ADC0832�c��Ƭ�C(j��)�Ľӿ��· ������r��ADC0832�c��Ƭ�C(j��)�Ľӿڑ�(y��ng)��4�l��(sh��)��(j��)�����քe��CS��CLK��DO��DI��������DO���cDI����ͨ�ŕr(sh��)��δͬ�r(sh��)��Ч���c��Ƭ�C(j��)�Ľӿ����p��ģ������·�O(sh��)Ӌ(j��)�r(sh��)���Ԍ�DO��DI��(li��n)��һ����(sh��)��(j��)����ʹ�á� ��(d��ng)ADC0832δ�����r(sh��)��CSݔ��ˑ�(y��ng)����ƽ���˕r(sh��)оƬ���ã�CLK��DO/DI���ƽ�����⡣��(d��ng)Ҫ�M(j��n)��A/D�D(zhu��n)�Q�r(sh��)����Ȍ�CSʹ�ܶ����ڵ��ƽ���ұ��ֵ��ƽֱ���D(zhu��n)�Q��ȫ�Y(ji��)�����˕r(sh��)оƬ�_ʼ�D(zhu��n)�Q������ͬ�r(sh��)��̎������оƬ�r(sh��)�ݔ���CLKݔ��r(sh��)��}�_��DO/DI�˄tʹ��DI��ݔ��ͨ�������x��Ĕ�(sh��)��(j��)��̖(h��o)���ڵ�1��(g��)�r(sh��)��}�_���³�֮ǰDI�˱���Ǹ��ƽ����ʾ��ʼ��̖(h��o)���ڵ�2��3��(g��)�}�_�³�֮ǰDI�ˑ�(y��ng)ݔ��2λ��(sh��)��(j��)�����x��ͨ�����ܡ��书���(xi��ng)Ҋ��2.2�� ��2.2ADC0832�Ĺ��ܱ�
���2.2��ʾ����(d��ng)��2λ��(sh��)��(j��)�顰1������0���r(sh��)��ֻ��(du��)CH0�M(j��n)�І�ͨ���D(zhu��n)�Q����(d��ng)2λ��(sh��)��(j��)�顰1������1���r(sh��)��ֻ��(du��)CH1�M(j��n)�І�ͨ���D(zhu��n)�Q����(d��ng)2λ��(sh��)��(j��)�顰0������0���r(sh��)����CH0������ݔ���IN+��CH1����ؓ(f��)ݔ���IN-�M(j��n)��ݔ�롣��(d��ng)2λ��(sh��)��(j��)�顰0������1���r(sh��)����CH0����ؓ(f��)ݔ���IN-��CH1������ݔ���IN+�M(j��n)��ݔ�롣 ����3��(g��)�}�_���³�֮��DI�˵�ݔ���ƽ��ʧȥݔ�����ã��˺�DO/DI�˄t�_ʼ���Ô�(sh��)��(j��)ݔ��DO�M(j��n)���D(zhu��n)�Q��(sh��)��(j��)���xȡ���ĵ�4��(g��)�}�_�³��_ʼ��DO��ݔ���D(zhu��n)�Q��(sh��)��(j��)���λDATA7���S��ÿһ��(g��)�}�_�³�DO��ݔ����һλ��(sh��)��(j��)��ֱ����11��(g��)�}�_�r(sh��)�l(f��)�����λ��(sh��)��(j��)DATA0��һ��(g��)�ֹ�(ji��)�Ĕ�(sh��)��(j��)ݔ����ɡ�Ҳ���ǏĴ�λ�_ʼݔ����һ��(g��)�෴�ֹ�(ji��)�Ĕ�(sh��)��(j��)�����ĵ�11��(g��)�ֹ�(ji��)���³�ݔ��DATD0���S��ݔ��8λ��(sh��)��(j��)������19��(g��)�}�_�r(sh��)��(sh��)��(j��)ݔ����ɣ�Ҳ��(bi��o)־��һ��A/D�D(zhu��n)�Q�ĽY(ji��)�������CS�ø��ƽ����оƬ��ֱ�ӌ��D(zhu��n)�Q��Ĕ�(sh��)��(j��)�M(j��n)��̎���Ϳ����ˡ� �����ͨ��ģ�M��̖(h��o)ݔ��r(sh��)ADC0832��ݔ��늉���0~5V��8λ�ֱ��ʕr(sh��)��늉����Ȟ�19.53mV�����������IN+�cIN-ݔ���ݔ��r(sh��)�����nj�늉�ֵ�O(sh��)����ijһ��(g��)�^��֮��(n��i)���Ķ�����D(zhu��n)�Q�Č��ȡ����M(j��n)��IN+�cIN-��ݔ��r(sh��)�����IN-��늉�����IN+��늉��t�D(zhu��n)�Q��Ĕ�(sh��)��(j��)�Y(ji��)��ʼ�K��00H�� 2.4 ��Ƭ�C(j��)�S����Ӽ��g(sh��)�İl(f��)չ����Ƭ�C(j��)�Ĺ��܌��������ƣ������Ƭ�C(j��)�đ�(y��ng)�Ì������ռ��������������ܻ��x������늮a(ch��n)Ʒ�����I(y��)�^�̿��Ƶȷ���õ����V���đ�(y��ng)�á���Ƭ�C(j��)�������ܻ��x�����С�С�Ϳ���ϵ�y(t��ng)�Б�(y��ng)�������зN��Ӌ(j��)��C(j��)�� 2.4.1 AT89C51��Ƭ�C(j��)��(ji��n)��AT89C51��һ�N��4K�ֹ�(ji��)�W�q�ɾ��̿ɲ���ֻ�x�惦(ch��)��FPEROM��Falsh Programmable and Erasable Read Only Memory���ĵ�늉���������CMOS8λ̎�������Q��Ƭ�C(j��)����Ƭ�C(j��)�Ŀɲ���ֻ�x�惦(ch��)�����Է���(f��)����100�Ρ�ԓ��������ATMEL���ܶȷ���ʧ�惦(ch��)�����켼�g(sh��)���죬�c���I(y��)��(bi��o)��(zh��n)��MCS-51ָ���ݔ�����_����ݡ����ڌ����8λCPU���W�q�惦(ch��)���M���چ�(g��)оƬ�У�ATMEL��AT89C51��һ�N��Ч��������AT89C2051������һ�N����(ji��n)�汾����D2.9��ʾ��AT89C51�ΙC(j��)��ܶ�Ƕ��ʽ����ϵ�y(t��ng)�ṩ�`���Ը������r(ji��)�ķ����� 
�D2.9 AT89C51��Ƭ�C(j��)�ĽY(ji��)��(g��u)ʾ��D 2.4.2��Ҫ�������cMCS-51 ����
��4K�ֹ�(ji��)�ɾ����W�q�惦(ch��)��
������1000��/��ѭ�h(hu��n)
��(sh��)��(j��)�����r(sh��)�g��10��
��ȫ�o�B(t��i)������0Hz-24Hz
������(j��)����惦(ch��)���i��
��128*8�(n��i)��RAM
��32�ɾ���I/O��
���ɂ�(g��)16λ���r(sh��)��/Ӌ(j��)��(sh��)��
��5��(g��)�Д�Դ
���ɾ��̴���ͨ��
�����ĵ��e�ú͵��ģʽ
��Ƭ��(n��i)��ʎ���͕r(sh��)��· 2.4.3 ���_�f��VCC�����늉��� GND���ӵء� P0�ڣ�P0�ڞ�һ��(g��)8λ©��(j��)�_·�p��I/O�ڣ�ÿ�_������8TTL�T�������(d��ng)P1�ڵĹ��_��һ�Ό�1�r(sh��)�������x�����ݔ�롣P0�܉������ⲿ����(sh��)��(j��)�惦(ch��)���������Ա����x�锵(sh��)��(j��)/��ַ�ĵڰ�λ����FIASH���̕r(sh��)��P0 ������ԭ�aݔ��ڣ���(d��ng)FIASH�M(j��n)��У�(y��n)�r(sh��)��P0ݔ��ԭ�a���˕r(sh��)P0�ⲿ��횱����ߡ� P1�ڣ�P1����һ��(g��)��(n��i)���ṩ��������8λ�p��I/O�ڣ�P1�ھ��_���ܽ���ݔ��4TTL�T�����P1�ڹ��_����1����(n��i)��������ߣ�������ݔ�룬P1�ڱ��ⲿ��������ƽ�r(sh��)����ݔ��������@�����ڃ�(n��i)�������ľ��ʡ���FLASH���̺�У�(y��n)�r(sh��)��P1������ڰ�λ��ַ���ա� P2�ڣ�P2�ڞ�һ��(g��)��(n��i)����������8λ�p��I/O�ڣ�P2�ھ��_���ɽ��գ�ݔ��4��(g��)TTL�T�������(d��ng)P2�ڱ�����1���r(sh��)������_����(n��i)������������ߣ�������ݔ�롣���������ݔ��r(sh��)��P2�ڵĹ��_���ⲿ���ͣ���ݔ��������@�����ڃ�(n��i)�������ľ��ʡ�P2�ڮ�(d��ng)�����ⲿ����惦(ch��)����16λ��ַ�ⲿ��(sh��)��(j��)�惦(ch��)���M(j��n)�д�ȡ�r(sh��)��P2��ݔ����ַ�ĸ߰�λ���ڽo����ַ��1���r(sh��)�������Ã�(n��i)��������(y��u)��(sh��)����(d��ng)��(du��)�ⲿ��λ��ַ��(sh��)��(j��)�惦(ch��)���M(j��n)���x���r(sh��)��P2��ݔ��������ܼĴ����ă�(n��i)�ݡ�P2����FLASH���̺�У�(y��n)�r(sh��)���ո߰�λ��ַ��̖(h��o)�Ϳ�����̖(h��o)�� P3�ڣ�P3�ڹ��_��8��(g��)����(n��i)�����������p��I/O�ڣ��ɽ���ݔ��4��(g��)TTL�T�������(d��ng)P3�ڌ��롰1������������(n��i)����������ƽ��������ݔ�롣����ݔ�룬�����ⲿ��������ƽ��P3�ڌ�ݔ�������ILL���@�����������ľ��ʡ� P3��Ҳ������AT89C51��һЩ����ܿڣ� P3�ڹ��_ ���x���� P3.0 RXD������ݔ��ڣ� P3.1 TXD������ݔ���ڣ� P3.2 /INT0���ⲿ�Д�0�� P3.3 /INT1���ⲿ�Д�1�� P3.4 T0��ӛ�r(sh��)��0�ⲿݔ�룩 P3.5 T1��ӛ�r(sh��)��1�ⲿݔ�룩 P3.6 /WR���ⲿ��(sh��)��(j��)�惦(ch��)�����xͨ�� P3.7 /RD���ⲿ��(sh��)��(j��)�惦(ch��)���x�xͨ�� P3��ͬ�r(sh��)���W�q���̺;���У�(y��n)����һЩ������̖(h��o)�� RST����(f��)λݔ�롣��(d��ng)��ʎ����(f��)λ�����r(sh��)��Ҫ����RST�_�ɂ�(g��)�C(j��)�����ڵĸ��ƽ�r(sh��)�g�� ALE/PROG����(d��ng)�L���ⲿ�惦(ch��)���r(sh��)����ַ�i�����S��ݔ���ƽ�����i���ַ�ĵ�λ�ֹ�(ji��)����FLASH�������g�������_����ݔ�뾎���}�_����ƽ�r(sh��)��ALE���Բ�׃���l������ݔ�����}�_��̖(h��o)�����l�ʞ���ʎ���l�ʵ�1/6���������������(du��)�ⲿݔ�����}�_�����ڶ��r(sh��)Ŀ�ġ�Ȼ��Ҫע����ǣ�ÿ��(d��ng)�����ⲿ��(sh��)��(j��)�惦(ch��)���r(sh��)�������^һ��(g��)ALE�}�_�������ֹALE��ݔ������SFR8EH��ַ����0���˕r(sh��)�� ALEֻ���ڈ�(zh��)��MOVX��MOVCָ����ALE�������á����⣬ԓ���_�������ߡ����̎�������ⲿ��(zh��)�Р�B(t��i)ALE��ֹ����λ�oЧ�� /PSEN���ⲿ����惦(ch��)�����xͨ��̖(h��o)�������ⲿ����惦(ch��)��ȡָ���g��ÿ��(g��)�C(j��)�����ڃɴ�/PSEN��Ч�������L���ⲿ��(sh��)��(j��)�惦(ch��)���r(sh��)���@�ɴ���Ч��/PSEN��̖(h��o)�������F(xi��n)�� /EA/VPP����(d��ng)/EA���ֵ��ƽ�r(sh��)���t�ڴ����g�ⲿ����惦(ch��)����0000H-FFFFH���������Ƿ��Ѓ�(n��i)������惦(ch��)����ע����ܷ�ʽ1�r(sh��)��/EA����(n��i)���i����RESET����(d��ng)/EA�˱��ָ��ƽ�r(sh��)�����g��(n��i)������惦(ch��)������FLASH�������g�������_Ҳ����ʩ��12V�����Դ��VPP���� XTAL1��������ʎ�Ŵ�����ݔ�뼰��(n��i)���r(sh��)犹����·��ݔ�롣 XTAL2�����Է�����ʎ����ݔ���� 2.4.4 ��ʎ������ XTAL1��XTAL2�քe�鷴��Ŵ�����ݔ���ݔ����ԓ����Ŵ����������Þ�Ƭ��(n��i)��ʎ����ʯ����ʎ���մ���ʎ���ɲ��á�������ⲿ�r(sh��)�Դ�(q��)��(d��ng)������XTAL2��(y��ng)���ӡ�����ݔ������(n��i)���r(sh��)���̖(h��o)Ҫͨ�^һ��(g��)�����l�|�l(f��)������ˌ�(du��)�ⲿ�r(sh��)���̖(h��o)���}���o�κ�Ҫ����횱��C�}�_�ĸߵ��ƽҪ��Č��ȡ� 2.4.5 оƬ��������(g��)PEROM��к�����(g��)�i��λ��늲�����ͨ�^���_�Ŀ�����̖(h��o)�M�ϣ�������ALE���_̎�ڵ��ƽ10ms ����ɡ���оƬ�������У����a���ȫ������1�������κηǿմ惦(ch��)�ֹ�(ji��)���؏�(f��)������ǰ��ԓ������횱���(zh��)�С� ���⣬AT89C51�O(sh��)�з�(w��n)�B(t��i)߉�������ڵ͵����l�ʵėl�����o�B(t��i)߉��֧�փɷNܛ�����x�ĵ��ģʽ�����e��ģʽ�£�CPUֹͣ��������RAM�����r(sh��)����Ӌ(j��)��(sh��)�������ں��Д�ϵ�y(t��ng)���ڹ������ڵ��ģʽ�£�����RAM�ă�(n��i)�ݲ��҃��Y(ji��)��ʎ������ֹ��������оƬ���ܣ�ֱ����һ��(g��)Ӳ����(f��)λ��ֹ�� 2.5 ��Ƭ�C(j��)���I�P�Ľӿڼ��g(sh��)2.5.1 �I�P���ܼ��Y(ji��)��(g��u)�����I�P�dž�Ƭ�C(j��)ϵ�y(t��ng)��(sh��)�F(xi��n)�˙C(j��)��(du��)Ԓ�ij���ݔ���O(sh��)�䡣�����Tͨ�^�I�P����Ӌ(j��)��C(j��)ϵ�y(t��ng)ݔ����N��(sh��)��(j��)��������ͨ�^ʹ���I�P����Ƭ�C(j��)ϵ�y(t��ng)̎���A(y��)���Ĺ��ܠ�B(t��i)�� �I�P�������(n��i)����ͬ�·�Y(ji��)��(g��u)���ɷ֞龎�a�I�P�ͷǾ��a�I�P���N�����a�I�P�������ˎ�����ͨ���I֮�⣬߀�����a(ch��n)���I�a��Ӳ���·��ʹ�Õr(sh��)��ֻҪ���¾��a�I�P��ijһ��(g��)�I��Ӳ��߉��(hu��)�Ԅ�(d��ng)�ṩ�����µ��I���I�a��ʹ��ʮ�ַ��㣬���r(ji��)���^�F���ɷǾ��a�I�P�M�ɵĺ�(ji��n)��Ӳ���·���H�ṩ����(g��)�I�����µ���Ϣ������������ܛ���팍(sh��)�F(xi��n)�����ڃr(ji��)����ˣ�����ʹ���`���ˏV����(y��ng)���چ�Ƭ�C(j��)��(y��ng)��ϵ�y(t��ng)�С� �Ǿ��a�I�P�������I�P���еĽY(ji��)��(g��u)���ֿɷ֞骚(d��)��ʽ���I������ʽ���I�ɷN��͡� 2.5.2 �I�P����(d��ng)��ȥ��Ŀǰ���N�Y(ji��)��(g��u)���I�P����Ҫ�����ÙC(j��)е�|�c(di��n)�ĺϡ������ã��a(ch��n)��һ��(g��)늉���̖(h��o)��Ȼ���@��(g��)���̖(h��o)���ͽoCPU�����ڙC(j��)е�|�c(di��n)�ď������ã����]�ϼ����_��˲�g���ж���(d��ng)�^�̡�����(d��ng)�r(sh��)�g�L(zh��ng)�̣��c�_�P(gu��n)�ęC(j��)е�������P(gu��n)��һ��s5��10ms֮�g���D2.10���]�ϼ����_�r(sh��)��늉�����(d��ng)���Σ� 
�D2.10 �I�]�ϼ����_�r(sh��)��늉�����(d��ng)���� ���I�ķ�(w��n)���]���ڣ��ɲ����ˆT�İ��I��(d��ng)�����_����һ���ʮ��֮����������r(sh��)�g���鱣�CCPU��(du��)�I��һ�β����H��һ��ݔ��̎�������ȥ������(d��ng)Ӱ푼��˞�IJ����r(sh��)���L(zh��ng)�̵�Ӱ푡� ͨ��ȥ����(d��ng)Ӱ푵Ĵ�ʩ��Ӳ��ܛ���ɷN�����û���R��S�|�l(f��)����η�(w��n)�B(t��i)�·��(g��u)��Ӳ��ȥ����(d��ng)�·��D2.11��ʾ��Ҳ�ɲ���ܛ���ӕr(sh��)�ķ�����ȥ�I�P����(d��ng)�a(ch��n)����Ӱ푡�����ܛ����ȥ����(d��ng)Ӱ푵��k���ǣ��ڙz�y(c��)�����I���r(sh��)����(zh��)��һ��(g��)10ms���ҵ��ӕr(sh��)����Ȼ����ȥ�Д�ԓ�I�ƽ�Ƿ��Ա����]�Ϡ�B(t��i)�ƽ���籣���]�Ϡ�B(t��i)�ƽ�t�ɴ_�J(r��n)ԓ�I�鰴� �B(t��i)���Ķ������˶���(d��ng)Ӱ푡� 
�D2.11 RCȥ����(d��ng)�· 2.5.3 ��Ƭ�C(j��)�c�I�P���B���I�P�c��Ƭ�C(j��)���B���چ�Ƭ�C(j��)ϵ�y(t��ng)���I�P�а��o��(sh��)���^���r(sh��)�����˜p��I/O�ڵ�ռ�ã����������o���гɾ����ʽ����2.13�D��ʾ���ھ��ʽ�I�P�У�ÿ�lˮƽ���ʹ�ֱ���ڽ���̎��ֱ���Bͨ������ͨ�^һ��(g��)���o�����B�ӡ��@�ӣ�һ��(g��)�˿ڣ���P1�ڣ����ܽM��4*4=16��(g��)���o����ֱ֮�ӌ��˿ھ������I�P�����һ�������Ҿ���(sh��)Խ�࣬�^(q��)�eԽ���@�������ٶ��һ�l�����ܽM��20�I���I�P����ֱ���ö˿ھ��tֻ�ܶ��һ�I��9�I�����ɴ˿�Ҋ������Ҫ���I��(sh��)���^���r(sh��)�����þ�ꇷ������I�P�Ǻ����ġ��ڌ�(sh��)�H��(y��ng)���У�4��4�I�P��Ҫ�ɔ�(sh��)��0��9�����I�M�ɡ��@��o��һ��(g��)���^���õ��I�P���з�ʽ�����2.3��ʾ�� ��2.3 ���I��
�����I�P�c��Ƭ�C(j��)���B�ӷ�ʽ�ɷ֞骚(d��)��ʽ�I�P�c���ʽ�I�P����(d��)��ʽ�I�P���(d��)����ÿ��(g��)���Iռ��һ��I/O�ھ���ÿ��I/O�ھ��ϵİ��I������B(t��i)����(hu��)Ӱ��������I�Ĺ�����B(t��i)����D2.12��ʾ�@�N���Iܛ������(ji��n)�Σ���ռ��I/O�ھ��^�ࣨһ���ھ�ֻ�ܽ�һ��(g��)�I�����m�����I�P��(y��ng)�Ô�(sh��)���^�ٵ�ϵ�y(t��ng)�С� 
�D2.12��(d��)��ʽ���I�ӿ��· �ڪ�(d��)���ǰ��I�ӿ��·Ҫ���^���ʽ�Y(ji��)��(g��u)���I�P�@Ȼ��ֱ�ӷ�Ҫ��(f��)�sһЩ���R(sh��)�eҲҪ��(f��)�sһЩ��D2.13��ʾ�� 
�D2.13 ��Ƭ�C(j��)���ʽ�I�P�ӿ��·
�ψD���о�ͨ�^�������Դ�������о����ӵĆ�Ƭ�C(j��)��I/O������ݔ���ˣ����о����ӵ�I/O�ڄt����ݔ�롣�@�ӣ���(d��ng)���o�]�а��r(sh��)�����е�ݔ���˶��Ǹ��ƽ������o�I���¡��о�ݔ���ǵ��ƽ��һ�����I���£��tݔ�뾀�͕�(hu��)�����ͣ��@�ӣ�ͨ�^�x��ݔ�뾀�Ġ�B(t��i)�Ϳɵ�֪�Ƿ����I�����ˡ����w���R(sh��)�e�������k���������������ʽ�I�P�İ��o�R(sh��)�e�k�� �_�����ʽ�I�P�Ϻ��I�����½�Bһ�N���В��跨�����В��跨 �В��跨�ַQ�����У����У������ԃ������һ�N��õİ��o�R(sh��)�e�k�������ψD��ʾ�I�P����B�^�����¡��Д��I�P���Пo�I���� ��ȫ���о�Y0-Y3�õ��ƽ��Ȼ��z�y(c��)�о��Ġ�B(t��i)��ֻҪ��һ�е��ƽ��ͣ��t��ʾ�I�P�����I�����£������]�ϵ��Iλ�ڵ��ƽ���c4���о��ཻ���4��(g��)���o֮�С��������о�������ƽ���t�I�P�Пo�I���¡� �Д��]���I���ڵ�λ�� �ڴ_�J(r��n)���I���º����M(j��n)��_�����w�]���I���^�̡����k���ǣ����Ό��о��Þ���ƽ��������ij���о�����ƽ�r(sh��)������������ƽ���ڴ_��ij���о�λ�Þ���ƽ�������Йz�y(c��)���о����ƽ��B(t��i)����ij�О�ͣ��tԓ�о��c�Þ���ƽ���о�����̎�İ��o�����]�ϵİ��o�� 2.6 LED�@ʾ�ӿ������O(sh��)Ӌ(j��)������89C51��Ƭ�C(j��)���пں�74LS164��λ�Ĵ�����(sh��)�F(xi��n)����(g��)LED�@ʾ��һ�N����,����ԓ�����O(sh��)Ӌ(j��)�Ķ�·LED�@ʾϵ�y(t��ng)����Ӳ���Y(ji��)��(g��u)��(ji��n)�Ρ�ܛ���������̓r(ji��)����������c(di��n). 2.6.1�l(f��)����O�ܼ�LED�@ʾ���l(f��)����O�����ɰ댧(d��o)�w�l(f��)��������ɵ�PN�Y(ji��)��ֻҪ�ڰl(f��)����O�܃ɶ�ͨ�^�������5-20mA�����_(d��)�������l(f��)�⡣LED�İl(f��)���ɫͨ���мt���G���S���ף������κ�늚�D�η�̖(h��o)��D2.14��ʾ����(g��)LEDͨ����ͨ�^�������ָʾϵ�y(t��ng)�\(y��n)�Р�B(t��i)���ÿ����W�q���(b��o)���� 
aa)���� b)�D�η�̖(h��o) �D2.14 LED ͨ�����f��LED�@ʾ����7��(g��)�l(f��)����O�ܽM�ɣ����Ҳ�Q֮���߶�LED�@ʾ�����������Π���D2.15��ʾ���@ʾ����߀��һ��(g��)Ȧ�c(di��n)�Ͱl(f��)����O�ܣ��ڈD����dp��ʾ���������@ʾС��(sh��)�c(di��n)��ͨ�^�߂�(g��)�l(f��)����O�������IJ�ͬ�M�ϣ������@ʾ��N��(sh��)�֡���ĸ�Լ�������̖(h��o)�� LED�@ʾ���еİl(f��)����O�ܹ��ЃɷN�B�ӷ����� ����ꖘO�ӷ� �Ѱl(f��)����O�ܵ�ꖘO�B��һ��(g��u)�ɹ���ꖘO��ʹ�Õr(sh��)����ꖘO�ӣ�5V��ꎘO��ݔ����ƽ�Ķΰl(f��)����O�܌�(d��o)ͨ�c(di��n)����ݔ����ƽ�Ąt���c(di��n)���� ����ꎘO�ӷ� �Ѱl(f��)����O�ܵ�ꎘO�B��һ��(g��u)�ɹ���ꎘO��ʹ�Õr(sh��)��(hu��)��ꎘO�ӵأ�ꖘO��ݔ����ƽ�Ķΰl(f��)����O�܌�(d��o)ͨ�c(di��n)����ݔ����ƽ�Ąt���c(di��n)���� 
�D2.15 LED�@ʾ ��LED�@ʾ���@ʾʮ���M(j��n)�Ɣ�(sh��)�����ʹ��a���±���ʾ�� ��2.4 ʮ���M(j��n)�Ɣ�(sh��)���δ��a 
2.6.2�߶Δ�(sh��)�a�@ʾ���߶�LED�@ʾ����Ҫ���(q��)��(d��ng)�·�(q��)��(d��ng)�����߶�LED�@ʾ���У���ꖘO�@ʾ�����õ��ƽ�(q��)��(d��ng)����ꎘO�@ʾ�����ø��ƽ�(q��)��(d��ng)���c(di��n)���@ʾ�����o�B(t��i)�̈́�(d��ng)�B(t��i)�ɷN��ʽ�� 2.6.2.1�o�B(t��i)�@ʾ���^�o�B(t��i)�@ʾ�����Ǯ�(d��ng)�@ʾ���@ʾijһ�ַ��r(sh��)������(y��ng)�εİl(f��)����O�ܺ㶨�،�(d��o)ͨ���ֹ���@�N�@ʾ������ÿһλ����Ҫ��һ��(g��)8λݔ���ڿ��ơ� �o�B(t��i)�@ʾ���ă�(y��u)�c(di��n)���@ʾ��(w��n)�����ڰl(f��)����O�܌�(d��o)ͨ���һ������r���@ʾ�������ȸߣ�����ϵ�y(t��ng)���\(y��n)���^���У��H�H����Ҫ�����@ʾ��(n��i)�ݕr(sh��)��CPU�ň�(zh��)��һ���@ʾ�����ӳ����@�Ӵ��(ji��)ʡ��CPU�ĕr(sh��)�g�������CPU�Ĺ���Ч�ʣ�ȱ�c(di��n)��λ��(sh��)�^���r(sh��)�������I/O��̫�࣬Ӳ���_�N̫�� 
�D2.16����λ�o�B(t��i)�@ʾ�· 2.6.2.2 ��(d��ng)�B(t��i)�@ʾ���^��(d��ng)�B(t��i)�@ʾ����һλһλ��݆���c(di��n)����λ�@ʾ�������裩����(du��)���@ʾ����ÿһλ���ԣ�ÿ��һ�Εr(sh��)�g�c(di��n)��һ�Ρ���ͬһ�r(sh��)��ֻ��һλ�@ʾ���ڹ������c(di��n)�������������۵�ҕ�X����Ч��(y��ng)�Ͱl(f��)����O��Ϩ��r(sh��)�����xЧ��(y��ng)�������ąs�Ƕ���(g��)�ַ���ͬ�r(sh��)���@ʾ��D2.17��ʾ�� 
�D2.17����λ��(d��ng)�B(t��i)�@ʾ���· �@ʾ�����ȼ��c�c(di��n)��?x��)r�Č�(d��o)ͨ������P(gu��n)��Ҳ�c�c(di��n)��?x��)r�g���g���r(sh��)�g�ı������P(gu��n)���{(di��o)������͕r(sh��)�g����(sh��)���Ɍ�(sh��)�F(xi��n)�����^���^��(w��n)�����@ʾ�� ��(d��ng)�B(t��i)�@ʾ���ă�(y��u)�c(di��n)�ǹ�(ji��)ʡӲ���YԴ���ɱ��^�͡����ڿ���ϵ�y(t��ng)�\(y��n)���^���У�Ҫ���C�@ʾ�������@ʾ��CPU����ÿ��һ�Εr(sh��)�g��(zh��)��һ���@ʾ�ӳ���ռ��CPU�����r(sh��)�g��������CPU�Ĺ���Ч�ʣ�ͬ�r(sh��)�@ʾ�����^�o�B(t��i)�@ʾ���͡� ���@ʾ����λ��(sh��)������8λ���t�����@ʾ�������O�λֻ��һ��(g��)8λI/O�ڣ��Q�����ڻ���λ�ڣ������Ƹ�λLED�@ʾ�����@ʾ������Ҳ��Ҫһ��(g��)8λ�ڣ��Q�锵(sh��)��(j��)���� 2.6.3 LED��(sh��)�a���o�B(t��i)�@ʾ�ӿ��چ�Ƭ�C(j��)��(y��ng)��ϵ�y(t��ng)�У���(sh��)�a���@ʾ���@ʾ���ÃɷN�k�����o�B(t��i)�@ʾ�̈́�(d��ng)�B(t��i)�����@ʾ������LED�ă�(y��u)�c(di��n)�ڱ����O(sh��)Ӌ(j��)�в����˔�(sh��)�a�ܵ��o�B(t��i)�@ʾ�����^�o�B(t��i)�@ʾ������ÿһ��(g��)��(sh��)�a���@ʾ����Ҫռ�ÆΪ�(d��)�ľ����i�湦�ܵ�I/O�ӿ����ڹP�������δ��a���@�ӆ�Ƭ�C(j��)ֻҪ��Ҫ�@ʾ�����δ��a�l(f��)�͵��ӿ��·���Ͳ��ù����ˣ�ֱ��Ҫ�@ʾ�µĔ�(sh��)��(j��)�r(sh��)���ٰl(f��)���µ����δa����ˣ�ʹ���@�N�k����Ƭ�C(j��)��CPU���_�NС���ܹ��o�Ϊ�(d��)�i���I/O�ӿ��·�ܶ࣬���õĴ����D(zhu��n)�Q�·74LS164�������·��D2.18��ʾ�� 
�D2.18 �o�B(t��i)LED�@ʾ�· MCS-51��Ƭ�C(j��)���пڷ�ʽ���Ƃ��Ĵ�����ʽ�����4Ƭ74LS164����4λLED��(sh��)�a���@ʾ�����o�B(t��i)�@ʾ�ӿڣ���AT89C51��RXD���锵(sh��)��(j��)ݔ������TXD������λ�r(sh��)��}�_��74LS164��TTL����8λ��λ�Ĵ������Ɍ�(sh��)�F(xi��n)����ݔ�룬����ݔ��������A��B����1��2�_���鴮�Д�(sh��)��(j��)ݔ��ˣ�2��(g��)���_��߉�c�\(y��n)��Ҏ(gu��)��ݔ����̖(h��o)������һ��(g��)ݔ����̖(h��o)�r(sh��)�ɲ��ӡ�CLK����8�_����r(sh��)�ݔ��ˣ����B�ӵ����пڵ�TXD�ˡ�ÿһ��(g��)�r(sh��)���̖(h��o)�������ؼӵ�CLK�˕r(sh��)����λ�Ĵ�����һλ��8��(g��)�r(sh��)��}�_�^��8λ���M(j��n)�Ɣ�(sh��)ȫ������74LS164�С�R����9�_�����(f��)λ�ˣ���(d��ng)R=0�r(sh��)����λ�Ĵ�����λ��(f��)0��ֻ�Ю�(d��ng)R=1�r(sh��)���r(sh��)��}�_�������á�Q1��Q8����3-6��10-13���_������ݔ���˷քe��LED��(sh��)�a���@ʾ����hg---a���Ό�(du��)��(y��ng)�Ĺ��_�ϡ���74LS164�@�Õr(sh��)��}�_��˲�g�������}�_���½��أ��������(sh��)��(j��)ݔ��ˣ���1��2���_���Ǹ��ƽ���t�͕�(hu��)��һ��(g��)1�M(j��n)�뵽74LS164�ă�(n��i)���������(sh��)��(j��)ݔ����ǵ��ƽ���t�͕�(hu��)��һ��(g��)0�M(j��n)�����(n��i)�����ڽo����8��(g��)�}�_�������M(j��n)��74LS164�ĵ�һ��(g��)��(sh��)��(j��)���_(d��)�����λ���ف�һ��(g��)�}�_����һ��(g��)�}�_�͕�(hu��)�����λ�Ƴ��� 6Ƭ7LS164��β�മ�����r(sh��)状˄t����һ���@�ӣ���(d��ng)ݔ��8��(g��)�}�_�r(sh��)���Ć�Ƭ�C(j��)RXD��ݔ���Ĕ�(sh��)��(j��)���M(j��n)�뵽�˵�һƬ74LS164���ˣ�����(d��ng)?sh��)ڶ���(g��)8��(g��)�}�_�������@��(g��)��(sh��)��(j��)���M(j��n)���˵ڶ�Ƭ74LS164�����µĔ�(sh��)��(j��)�t�M(j��n)���˵�һƬ74LS164���@�ӣ���(d��ng)?sh��)�����(g��)8��(g��)�}�_��ɺ��״��ͳ��Ĕ�(sh��)��(j��)���͵����������74LS164�У�������(sh��)��(j��)���γ��F(xi��n)�ڵ�һ�����������ġ���Ƭ74LS164�С�
������ ܛ���O(sh��)Ӌ(j��)
3.1 A/D�D(zhu��n)�Q����ܛ���O(sh��)Ӌ(j��)��Ƭ�C(j��)����ϵ�y(t��ng)��ͨ��Ҫ�õ�AD�D(zhu��n)�Q������(j��)ݔ����ʽ�����õ�AD�D(zhu��n)�Q��ʽ�ɷ֞鲢��AD�ʹ���AD�����з�ʽһ�����D(zhu��n)�Q���ֱ�ӽ��գ���оƬ�����_���^�ࣻ���з�ʽ����оƬ���_�٣����bС������Ҫܛ��̎�����ܵõ�����Ҫ�Ĕ�(sh��)��(j��)�����dž�Ƭ�C(j��)I/O���_�����Ͳ��࣬ʹ�ô����������Թ�(ji��)ʡI/O�YԴ�� ADC0832�ǣ�λ��αƽ�ģ��(sh��)�D(zhu��n)�Q������֧�փɂ�(g��)�ζ�ݔ��ͨ����һ��(g��)���ݔ��ͨ������ͬ���ܵ�����߀��ADC0834��ADC0838��ADC0831������ͬ����������ݔ��ͨ����(sh��)����ͬ��������ͨ���x������ö���ͨ�^ܛ���O(sh��)�á� 3.1.1 ADC0832оƬ�ӿڳ���ľ�����Ƭ�C(j��)���й�����ʽ�r(sh��) ,���п�������ͬ����λ�Ĵ���ʹ�á��@�r(sh��)�� P3.3�����锵(sh��)��(j��)��λ����ںͳ��� ,����P3.6���ṩ��λ�r(sh��)��}�_����Ƭ�C(j��)���пڷ�ʽ 0�c ADC0832�Ľӿ�,��Ƭ�C(j��)P2.0��ADC0832��CS,P3.6��0832��CLK����r(sh��)���̖(h��o)ݔ���� ,P3.7 �� 0832�� DO��DI���醢��(d��ng)λ������λ�İl(f��)�Ͷ��Լ� A/D�D(zhu��n)�Q��ݔ����(sh��)��(j��)�Ľ��նˡ����� ADC0832�� CS׃�ͺ��ǰ 3��(g��)���ڃ�(n��i),DO�˞����B(t��i);�D(zhu��n)�Q�_ʼ�� ,DI����ֹ ,��� ,DI�˺� DO�˿��B����һ��ADC0832�ĕr(sh��)��l����ߞ� 400kHz,��Ƭ�C(j��)������x�� 4MHz,�� TXD��ݔ���l�ʞ� 4MHz/12 =333. 3kHz,����Ҫ��ADC0832ݔ���Ĵ��Д�(sh��)��(j��)�� 15λ ,�Ƀɶ� 8λ��(sh��)��(j��)�M�� ,ǰһ�������λ���� ,��һ��������ں� ,�ɶΔ�(sh��)��(j��)�����λ���á�ֻ���ڕr(sh��)犵��½��� ,ADC0832�Ĵ��Д�(sh��)��(j��)���Ƴ�һλ���Ɇ�Ƭ�C(j��)���ƕr(sh��)���̖(h��o)�İl(f��)�� ,����P3.6�l(f��)�� ,���_(d��)������ ADC0832ݔ����(sh��)��(j��)λ��Ŀ�ġ����˵õ�һ�������� 8λ��(sh��)��(j��) ,��Ƭ�C(j��)�փɴβɼ����в�ͬλ�Ĕ�(sh��)��(j��) ,�ٺϳ�һ�������� 8λ��(sh��)��(j��)�� ADC0832ͨ�^��(n��i)����·���������x��ͨ����̎�����Ŀ�������ͨ�^DI���_ݔ�롣�������̈D��ʾ����(d��ng)ģ�M��̖(h��o)ݔ���_ʼ��������CSʹ����̖(h��o)Ҳ����Ƭ�x��̖(h��o)��Ч���@�r(sh��)�ǵ��ƽ��Ч�����Ƭ�x�Ǹ��ƽ�r(sh��)ֹͣ�D(zhu��n)�Q����(d��ng)�r(sh��)���̖(h��o)��Ч�r(sh��)ݔ��ͨ���Ŀ����ց��_�����x���ͨ�����xȡ��(sh��)��(j��)����_ʼ��ģ�M���D(zhu��n)�Qλ��(sh��)������A/D�D(zhu��n)�Q�Y(ji��)����Ƭ�C(j��)�xȡ��(sh��)ֵ������]�D(zhu��n)�Q�꣬�ֻص�ʹ���_ʼ��  �D3.1 ADC0832��(sh��)��(j��)�xȡ�������� 3.2 ��Ƭ�C(j��)�c�I�P�Ľӿڳ����O(sh��)Ӌ(j��)AT89C51��Ƭ�C(j��)��P1�������I�PI/O�ڣ��I�P���о��ӵ�P1�ڵĵ�4λ���I�P���о��ӵ�P1�ڵĸ�4λ���о�P1.0-P1.3�քe����4��(g��)������赽���Դ+5V�������о�P1.0-P1.3�O(sh��)�Þ�ݔ�뾀���о�P1.4-P.17�O(sh��)�Þ�ݔ������4���о���4���о��γ�16��(g��)�ཻ�c(di��n)���z�y(c��)��(d��ng)ǰ�Ƿ����I�����¡��z�y(c��)���k����P1.4-P1.7ݔ��ȫ��0�����xȡP1.0-P1.3�Ġ�B(t��i)����P1.0-P1.3��ȫ��1�����t�o�I�]�ϣ���Ȼ���I�]�ϡ� ȥ���I����(d��ng)����(d��ng)�z�y(c��)�����I���º��ӕr(sh��)һ�Εr(sh��)�g������һ���ęz�y(c��)�Дࡣ �����I�����£���(y��ng)�R(sh��)�e������һ��(g��)�I�]�ϡ��k���nj�(du��)�I�P���о��M(j��n)�В��衣P1.4-P1.7������4�N�M������ݔ���� P1.7 1 1 1 0 P1.6 1 1 0 1 P1.5 1 0 1 1 P1.4 0 1 1 1 ��ÿ�M��ݔ���r(sh��)�xȡP1.0-P1.3����ȫ�顰1�����t��ʾ�顰0���@һ�Л]���I�]�ϣ���Ȼ���I�]�ϡ��ɴ˵õ��]���I����ֵ����ֵ��Ȼ��ɲ���Ӌ(j��)�㷨���������]���I����ֵ����ֵ�D(zhu��n)�Q�������x���Iֵ�����˱��C�Iÿ�]��һ��CPU�H��һ��̎������횅s���Iጷŕr(sh��)�Ķ���(d��ng)�� �����Ϸ����õ���Ƭ�C(j��)�I�P�����������̈D��D3.2��ʾ����������  �D3.2��Ƭ�C(j��)���ʽ�I�P�ӿ����̈D 3.4 LED��(sh��)�a���@ʾ�����O(sh��)Ӌ(j��)���Æ�Ƭ�C(j��)��(n��i)���Ĵ��нӿڣ����Ԍ�(sh��)�F(xi��n)�o�B(t��i)���@ʾ̎�����@�Ӳ��H���Թ�(ji��)ʡ��Ƭ�C(j��)�IJ��нӿ��YԴ�������ڴ����(sh��)��ʹ�ô��нӿڵ���r�£����Ԝp�ٻ�����ȥ�U(ku��)չ�ӿڡ� ���@�N�O(sh��)Ӌ(j��)�У����пڹ����ڷ�ʽ0����(sh��)��(j��)��ݔ��ݔ����ͨ�^RxD��(sh��)�F(xi��n)����λ�}�_�t��TxD�l(f��)����ÿ����һ��(g��)�ֹ�(ji��)��(sh��)��(j��)��ÿݔ��һ��(g��)�ֹ�(ji��)��(sh��)��(j��)����Ƭ�C(j��)�Ԅ�(d��ng)ʹ�����Д�Ո(q��ng)���(bi��o)־TI�á�ͨ�^�y(c��)ԇԓ��B(t��i)�����ɴ_��ԓ�ֹ�(ji��)�Ƿ�l(f��)���ꮅ����Ӳ���·�D��֪��74LS164�Ǵ���ݔ�벢��ݔ������λ�Ĵ����������Ѓɂ�(g��)����ݔ��˺�8λ����ݔ���ˣ�QA~QH���� ��(d��ng)�@ʾ��(sh��)��(j��)��RxD��ݔ������λ�Ĵ���74LS164��ݔ���AB�r(sh��)��74LS164�����Д�(sh��)��(j��)�D(zhu��n)�Q��8λݔ���aQA~QH��Ȼ��ӵ���ꖘOLED�@ʾ���ϡ���������һλ���@ʾ��߀ҪP1�ڵĠ�B(t��i)��������(d��ng)ijһλ����ƽ�r(sh��)��ԓλLED�@ʾ������λ���@ʾ�����ڽӿ��·���@ʾģ��ݔ����ַ��λ�x��̖(h��o)��һ���x�У���ֻҪһ��ݔ�������@ʾһλ�� 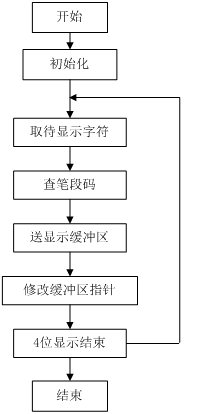 
�D3.3 LED���@ʾ���̈D
������ ���Y(ji��)
���O(sh��)Ӌ(j��)�������������y���@��(du��)�Լ���һ��(g��)���(y��n)�����_ʼ�õ��}Ŀ�ĕr(sh��)���^�w�����Ǻܶ࣬ͨ�^����Y�ό�(du��)����(g��)ϵ�y(t��ng)����һ�����J(r��n)�R(sh��)����Ƭ�C(j��)�����P(gu��n)��(n��i)���ڴ������n�̌W(xu��)�^�����njW(xu��)�ò����Ǻ�����O(sh��)Ӌ(j��)ǰ�����W(xu��)��(x��)��һ���Ƭ�C(j��)��֪�R(sh��)������оƬ�ӿں�51ϵ�І�Ƭ�C(j��)��ָ��ȡ�����A/D�D(zhu��n)�Q��ADC0832���½��|��һ�NоƬ�����W(xu��)��(x��)оƬ�����⣬��Ҫ�˽��ˌ�(du��)оƬ����ݔ���Ŀ��ƣ��@���ܛ���O(sh��)Ӌ(j��)��һ��(g��)�y�c(di��n)���҂��@���õ�����PROTEI99�L�Dܛ�����҂���ǰ�W(xu��)�^���njW(xu��)�IJ����@��(du��)�ҁ��f�ǂ�(g��)�y�c(di��n)������ͨ�^������ͬ�W(xu��)�ώ��Ď�æ��ʹ���Ү�����ԭ��D��PCB��ij��D��߀�о��Ǻ��棬�����þ͟o���@ʾҪ�Ĕ�(sh��)��(j��)���{(di��o)ԇ�����P(gu��n)�I�ĕr(sh��)���_ʼ�ĕr(sh��)��]���@ʾ�����ij���ĕr(sh��)���˲��ٕr(sh��)�g��K���@ʾ������Ҫ�ĽY(ji��)������(d��ng)�������d������ĕr(sh��)���������@ʾ0000�������׃����(d��ng)׃�����r(sh��)��ͨ�^ADC0832�Ϳ����@ʾ��ͬ�Ĕ�(sh��)��(j��)�������������Dzɼ�ģ�M����Ȼ���@ʾ��Ҫ�Ĕ�(sh��)��(j��)�����J(r��n)���҂����I(y��)�W(xu��)��(x��)Ӳ��֪�R(sh��)����(du��)��ܛ���࣬������ܛ���O(sh��)Ӌ(j��)������߀�кܴ��㡣������O(sh��)Ӌ(j��)��(j��ng)�^���W(xu��)��(x��)�Cģ�¨C�����C�ĨC���ĨC���͡����A�Σ���ܛ���ČW(xu��)��(x��)����Ҳ���˱��^��ĕr(sh��)�g�;���������ο�����ի@Ҳ�ܴ�
���AӲ��ԭ��D 
���B- #include<reg51.h>
- #include<stdio.h>
- #include<math.h>
- #include <intrins.h>
- #define uint unsigned int
- #define uchar unsigned char
- #define ADC0832CH0 channel;
- //*********���x׃���^(q��)*******************
- sbit clk_adc0832=P3^6; //���x����(g��)�������_
- sbit cs_adc0832=P2^0;
- sbit di_adc0832=P3^7;
- sbit do_adc0832=P3^7;
- sbit LED0_CS=P1^0;
- sbit LED1_CS=P1^1;
- sbit LED2_CS=P1^2;
- sbit LED3_CS=P1^3;
- sbit adarm=P2^2;
- uchar code table[11]={0xc0,0xf9,0xa4,0xb0,0x99,0x92,0x82,0xf8,0x80,0x90, 0xff};//0,1,2,3,4,5,6,7,8,9,off //��ꖘO�P�˴a
- uchar ch; //�ɘӷ���?c��i)?sh��)��(j��)
- //*********����(sh��)���^(q��)********************
- void tkey(void); //�I�P����(sh��)
- unsigned runADC0832(bit); //A/D�D(zhu��n)�Q
- void Delayms(uint x); //�ӕr(sh��)�@ʾ����(sh��)
- void Update_LED(); //LED�@ʾ����(sh��)
- void LED_analyze();
- //**********������(sh��)�_ʼ**********
- void main()
- {
- P0=0XFF;
- P1=0XFF;
- P2=0XFF;
- P3=0XFF;
- Uart_Init();
- TH0=0x3C;
- TL0=0xAF;
- ET0=1; //�_�ⲿ�Д�0
- EA=1; //ȫ���Д���_
- TR0=1;
- nCounter=0;
- Change_Flag=0;
- while(1)
- {
- void tkey(void);
- runADC0832();
- if(Change_Flag==1)
- { Update_LED();
- if(ch>9999)
- ch=0;
- printf("counter refreshed %d \n",ch);
- }
- delay();
- /********���I�錤�Iֵ4*4����******/���I��P1.0---P1.7
- void Tkey(void)
- {
- uchar readkey;//rereadkey;
- uchar x_temp,y_temp;
- P1=0x0f;
- x_temp=P1&0x0f;
- if(x_temp==0x0f) goto keyout;
- P1=0xf0;
- y_temp=P1&0xf0;
- readkey=x_temp|y_temp;
- readkey=~readkey;
- switch(readkey)
- {
- case 0x11:key=0; break;
- case 0x21:key=1; break;
- case 0x41:key=2; break;
- case 0x81:key=3; break;
- case 0x12:key=4; break;
- case 0x22:key=5; break;
- case 0x42:key=6; break;
- case 0x82:key=7; break;
- case 0x14:key=8; break;
- case 0x24:key=9; break;
- case 0x44:key=10;break;
- case 0x84:key=11;break;
- case 0x18:key=12;break;
- case 0x28:key=13;break;
- case 0x48:key=14;break;
- case 0x88:key=15;break;
- default: key=16;break;
- }
- keyout:_nop_();
- }//**********A/D�D(zhu��n)�Q�ӳ����_ʼ***************
- unsigned runADC0832(void) //�xADC0832����(sh��)
- {
- uchar i=0;
- uchar j;
- uint dat=0;
- uchar ndat=0;
- if(channel==0)channel=2;
- if(channel==1)channel=3;
- ADDI=1;
- _nop_();
- _nop_();
- ADCS=0;//����CS��
- _nop_();
- _nop_();
- ADCLK=1;//����CLK��
- _nop_();
- _nop_();
- ADCLK=0;//����CLK��,�γ��½���1
- _nop_();
- _nop_();
- ADCLK=1;//����CLK��
- ADDI=channel&0x1;
- _nop_();
- _nop_();
- ADCLK=0;//����CLK��,�γ��½���2
- _nop_();
- _nop_();
- ADCLK=1;//����CLK��
- ADDI=(channel>>1)&0x1;
- _nop_();
- _nop_();
- ADCLK=0;//����CLK��,�γ��½���3
- ADDI=1;//��������Y(ji��)��
- _nop_();
- _nop_();
- dat=0;
- for(i=0;i<8;i++)
- {
- dat|=ADDO;//�Ք�(sh��)��(j��)
- ADCLK=1;
- _nop_();
- _nop_();
- ADCLK=0;//�γ�һ�Εr(sh��)��}�_
- _nop_();
- _nop_();
- dat<<=1;
- if(i==7)dat|=ADDO;
- }
- for(i=0;i<8;i++)
- {
- j=0;
- j=j|ADDO;//�Ք�(sh��)��(j��)
- ADCLK=1;
- _nop_();
- _nop_();
- ADCLK=0;//�γ�һ�Εr(sh��)��}�_
- _nop_();
- _nop_();
- j=j<<7;
- ndat=ndat|j;
- if(i<7)ndat>>=1;
- }
- ADCS=1;//����CS��
- ADCLK=0;//����CLK��
- ADDO=1;//���ߔ�(sh��)��(j��)��,�ص���ʼ��B(t��i)
- dat<<=8;
- dat|=ndat;
- return(dat); //return ad k
- }
- void control(uchar d) //��(sh��)��(j��)��(g��)��ʮ���١�ǧȡ��(sh��)����(sh��)
- ch=ch%10000;
- AD_bcd[0] =ch/1000;
- AD_bcd[1]=(ch/100)%10;
- AD_bcd[2] =(ch%100)/10;
- AD_bcd[3]=(ch%100)%10;
- update_disbuf();
- }
- void update_disbuf(void) //��(du��)��(y��ng)�@ʾ�Ĕ�(sh��)��(j��)����(sh��)
- { P0=dis_code[AD_bcd[0]];
- LED_0=0;
- Delayms(10);
- LED_0=1;
- P0=dis_code[AD_bcd[1]];
- LED_1=0;
- Delayms(10);
- LED_1=1;
- P0=dis_code[AD_bcd[2]];
- LED_2=0;
- Delayms(10);
- LED_2=1;
- P0=dis_code[AD_bcd[3]];
- LED_3=0;
- Delayms(10);
- LED_3=1;
- }
������Word��ʽ�ęn51�����d��ַ��
| 




 ����TQQ:125739409;���g(sh��)����QQȺ281945664
����TQQ:125739409;���g(sh��)����QQȺ281945664






 QQ���Ѻ�Ⱥ
QQ���Ѻ�Ⱥ QQ���g
QQ���g �vӍ��
�vӍ�� �vӍ����
�vӍ���� �ղ�
�ղ� ����
���� �
� ��
��