|
|
可用于大學(xué)生課設(shè)畢設(shè)

結(jié) 論
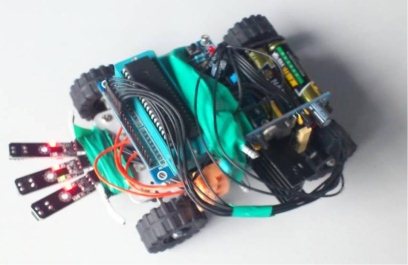
本課題研究的內(nèi)容主要是智能小車的循跡系統(tǒng)。以實驗組裝小車為基礎(chǔ),使用了 4
個光電傳感器來探測周圍環(huán)境,同時對采集到的數(shù)據(jù)信息進行融合。取得了以下成果:
(1)小車可以實現(xiàn)按照預(yù)定軌道在無外部環(huán)境影響或改變時,小車將一直沿著黑色
標記線運動。
(2) 經(jīng)過二十次的測試證明,當(dāng)四個循跡傳感器呈 M 型布局時最適合檢測多彎道的
軌跡。由于傳感器不在同一直線上,故小車轉(zhuǎn)彎時,左右兩邊后部的傳感器有較大的采
樣空間,兩邊前端的傳感器則對采集的信號有更好的前瞻性。整個布局有利于在彎道處
提高小車速度。但相對一字型布局,M 型布局容易產(chǎn)生不穩(wěn)定信號,從而產(chǎn)生信號震
蕩,影響小車行駛的穩(wěn)定性。
(3)小車保留了擴展功能。循跡小車在完成設(shè)計預(yù)想的前提下,主要考慮了車體結(jié)
構(gòu)設(shè)計的簡單化,降低了制作成本,使之更具有普及性。由于設(shè)計要求并不復(fù)雜,沒有
在電路中增加冗余的功能,但是保留了各種硬件接口和軟件子程序接口,方便以后的擴
展和進一步的開發(fā)。
智能循跡小車屬于應(yīng)用開發(fā)項目,涉及了多種學(xué)科,由于本課題的試驗性和不完善
性。智能循跡小車在以下兩個方面還有提升的空間:
(1)環(huán)境信息采集功能:環(huán)境信息采集的實時性和完整性。
(2)增加避障控制功能:包括避障的精確性和靈活度這兩個指標。
附錄 A 原理圖及 PCB 圖
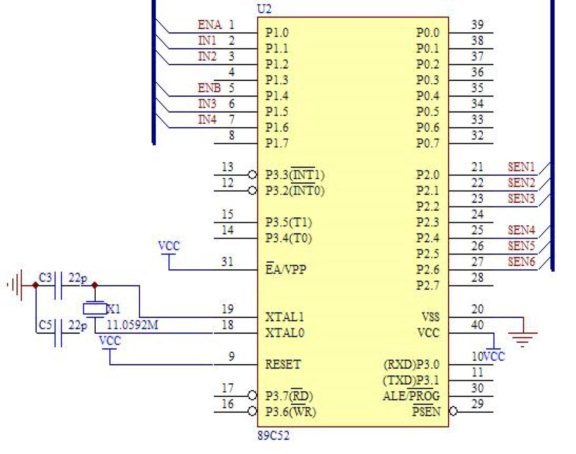
系統(tǒng)總設(shè)計電路圖
  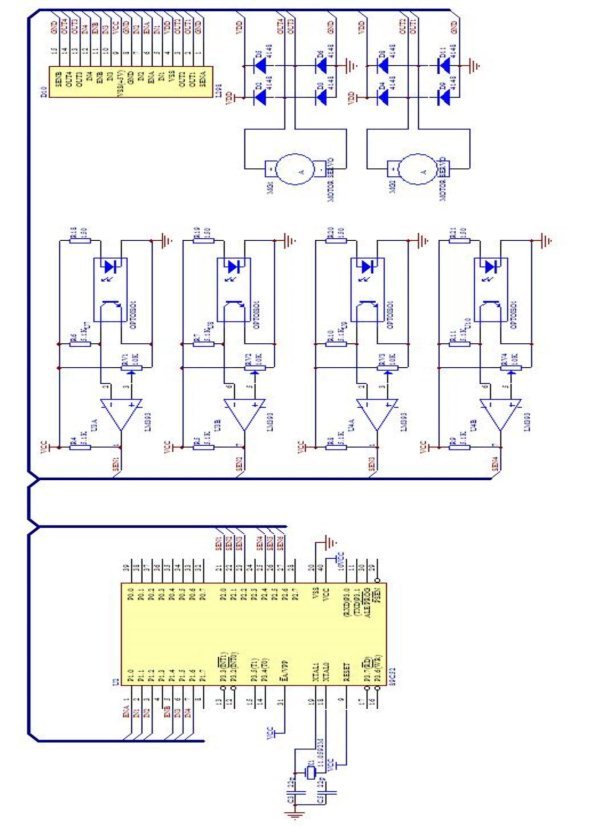
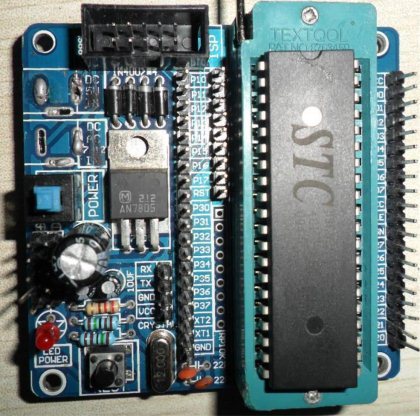
單片機原理圖
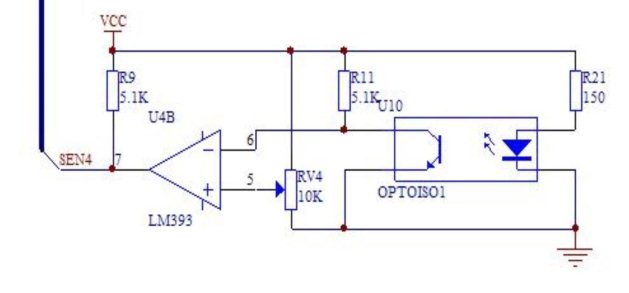
TCRT5000 傳感器模塊原理圖
沈陽理工大學(xué)
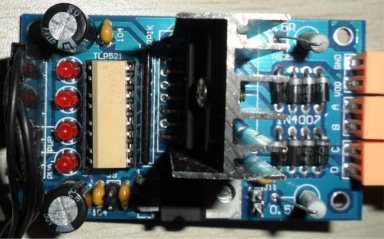
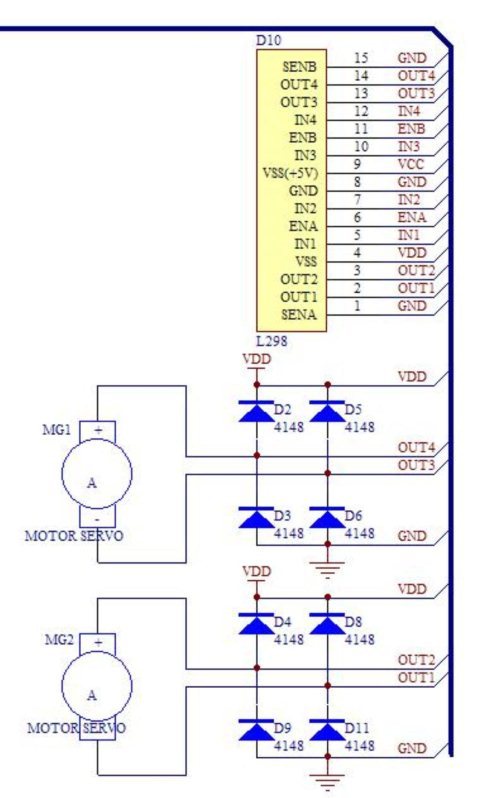
L298 電機控制驅(qū)動模塊原理圖
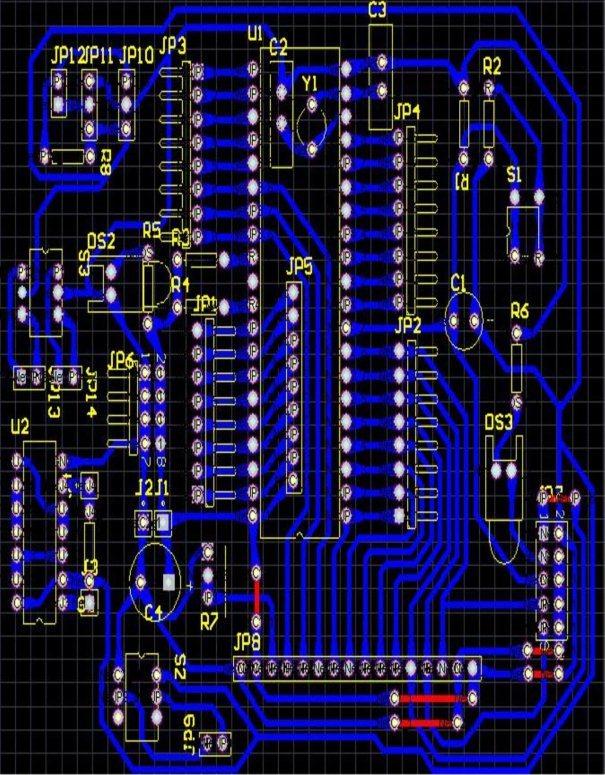
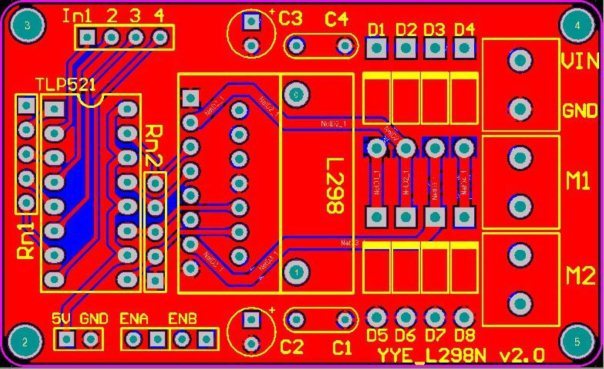
PCB 圖:
單片機 PCB 圖
L298N 電機驅(qū)動模塊 PCB 圖

0.png (41.88 KB, 下載次數(shù): 55)
下載附件
2018-6-3 04:18 上傳
全部資料51hei下載地址:
 基于單片機的智能循跡小車設(shè)計.zip
(1.96 MB, 下載次數(shù): 121)
基于單片機的智能循跡小車設(shè)計.zip
(1.96 MB, 下載次數(shù): 121)
2018-6-2 15:20 上傳
點擊文件名下載附件
下載積分: 黑幣 -5
|
評分
-
查看全部評分
|










 QQ好友和群
QQ好友和群 QQ空間
QQ空間 騰訊微博
騰訊微博 騰訊朋友
騰訊朋友 收藏
收藏 淘帖
淘帖 頂
頂 踩
踩
