һ���O(sh��)Ӌ(j��)�΄�(w��)�cҪ��
1.1�O(sh��)Ӌ(j��)�΄�(w��)���üt����չܵġ���늌�(d��o)�����ԣ������~���D(zhu��n)�r(sh��)��(du��)���ړ��a(ch��n)���Ĺ���̖(h��o)�D(zhu��n)�Q���Ƭ�C(j��)��̎�����}�_��̖(h��o)���Ķ���(sh��)�F(xi��n)��(du��)���~�Ĝy(c��)�١�
1.2�O(sh��)Ӌ(j��)Ҫ����51��Ƭ�C(j��)����A(ch��)��ͨ�^�t�⌦(du��)�ܜy(c��)�����~�����D(zhu��n)�ٶȣ���4λ��(sh��)�a���@ʾ�����^Ҏ(gu��)���D(zhu��n)�ٕr(sh��)�����Q�����档
�����������w�O(sh��)Ӌ(j��)
���O(sh��)Ӌ(j��)����D(zhu��n)�Q�·�r(sh��)�҂������üt��l(f��)����O�ܺͼt����չ̶ܹ������D(zhu��n)���w���S�ϣ����D(zhu��n)�S�ϰ��bһ�ڹ�壬������8�~���Σ���(d��ng)�D(zhu��n)݆���D(zhu��n)�r(sh��)���l(f��)����O�ܡ��ȿס��������O����һ�lֱ���ϣ����мt���ͨ�^�������r(sh��)�g�t���ړ������ã��]�й�ͨ�^���t����չܽ��ռt����D(zhu��n)����һ��(g��)�}�_���a(ch��n)��һ��(g��)�}�_�f���D(zhu��n)�˷�֮һȦ���@��ֻ��Ҫ�y(c��)��һ���(n��i)�������O��ݔ���}�_��(g��)��(sh��)����֪���D(zhu��n)���ˣ������҂�߀����ʩ�����|�l(f��)�����������O�ܮa(ch��n)�����}�_�D(zhu��n)�����˷��������O(sh��)Ӌ(j��)Ӌ(j��)�r(sh��)�·�r(sh��)���҂�ʹ��555���r(sh��)������ʩ�����|�l(f��)��������51��Ƭ�C(j��)������̖(h��o)̎�����@ʾ�·���������߶�ʽ��(sh��)�a�@ʾ������(sh��)��(j��)�@ʾ������
2.1�O(sh��)Ӌ(j��)Ŀ���S���y(c��)�ؼ��g(sh��)�ĸ��ٰl(f��)չ��늙C(j��)�Ĝy(c��)���ѽ�(j��ng)�ɞ鰲ȫ���a(ch��n)�ز����ٵ�һ���֣������n���O(sh��)Ӌ(j��)һ�����Ǟ���얹��Լ����W(xu��)��֪�R(sh��)��һ�������������˽����a(ch��n)����:
1)�M(j��n)һ���쾚���Ն�Ƭ�C(j��)���̵ķ�����˼�롣
2)����555���r(sh��)���ӳ�˹�����|�l(f��)���ķ�����
3)�W(xu��)��(hu��)���üt�⌦(du��)�܌�����̖(h��o)�D(zhu��n)�Q���}�_��̖(h��o)��
4)�M(j��n)һ�����ժ�(d��)��ʽ�I�P�ľ��̿��Ʋ��J(r��n)�R(sh��)��(d��)��ʽ�I�P�ڌ�(sh��)�H�е��\(y��n)�á�
5)����(qi��ng)��(du��)��Ƭ�C(j��)���dȤ����(d��ng)�������� ���ڴ��^���ЌW(xu��)��(hu��)��(du��)��������{(di��o)ԇ��
2.2Ӳ�����������t��y(c��)�كx���Ԍ�����̖(h��o)�D(zhu��n)�Q���}�_��̖(h��o)�������Ԍ�늙C(j��)���D(zhu��n)��(d��ng)�^���Ќ�(du��)�⾀�ړ����l���D(zhu��n)�Q��ͬ���l�ʵ��}�_��̖(h��o)��ͨ�^��Ƭ�C(j��)��(n��i)����̖(h��o)̎����ͨ�^��λ�˶Δ�(sh��)�a���@ʾ�D(zhu��n)�١�����̎�ڰ�ȫ�Ŀ��]����(d��ng)늙C(j��)�D(zhu��n)�ٳ��^ijһҎ(gu��)��ֵ�r(sh��)�����Q����Ծ��棬���I2���Կ����Ƿ���_�˹��ܡ�
2.3�O(sh��)Ӌ(j��)�����x��1���y(c��)�ٷ�����
���üt�⌦(du��)��
�t�⌦(du��)���ɼt��l(f��)��ܺͼt����չ܃ɲ��ֽM�ɣ�
�t�⾀�l(f��)�����LED���b�ИI(y��)����Ҫ������(g��)���õIJ��Σ�����850NM��875NM��940NM������(j��)���L(zh��ng)�������\(y��n)�õĮa(ch��n)ƷҲ�кܴ�IJ��850NM���L(zh��ng)����Ҫ���ڼt�⾀�O(ji��n)���O(sh��)�䣬875NM��Ҫ�����t(y��)���O(sh��)�䣬940NM���ε���Ҫ���ڼt�⾀�����O(sh��)��
�t�⾀���չܹ����c�������չ�����ֻ�Dz��ܿ�Ҋ��ĸɔ_���й���e���`���ȸߣ����ڹ������O�ܣ�һ��ֻ��(du��)�t�⾀�з���(y��ng)��
2���@ʾ������
һ��(g��)���õ��@ʾģ�K��(du��)һ��(g��)ϵ�y(t��ng)���f�dz���Ҫ�����в����Y(ji��)����Ӌ(j��)�r(sh��)�Y(ji��)������Ҫͨ�^�@ʾģ�K���@ʾ������ͬ�r(sh��)�@ʾģ�K�ṩ�����õ��˙C(j��)����ƽ�_(t��i)�����õ��@ʾģʽ��LED ��8�Δ�(sh��)�a���@ʾ ���c(di��n)��@ʾ��Һ���@ʾ��
����1��Һ���@ʾ��
Һ���@ʾ����LED�������p����С���ͺ�������oݗ��Σ�U(xi��n)��ƽ��ֱ���@ʾ�Լ�����(w��n)�����W�q�ȃ�(y��u)��(sh��)����ҕ��e����Ч���ã��ֱ��ʸߣ����ɔ_������(qi��ng)�����c(di��n)��������Һ����ɱ�ƫ�ߣ���ʹ�Õr(sh��)���������o늸ɔ_����t�ן�����Һ�����@ʾоƬ��
����2��LED��(sh��)�a��
led��(sh��)�a�ܣ�LEDSegmentDisplays�����ɶ���(g��)�l(f��)����O�ܷ��b��һ��M�ɡ�8�����͵��������������ڃ�(n��i)���B����ɣ�ֻ�����������ĸ���(g��)�P��������늘O��led��(sh��)�a�ܳ��öΔ�(sh��)һ���7���е�����һ��(g��)С��(sh��)�c(di��n)��߀��һ�N�������3λ��+1���͡�λ��(sh��)�а�λ��1��2��3��4��5��6��8��10λ�ȵȣ�led��(sh��)�a�ܸ���(j��)LED�Ľӷ���ͬ�֞鹲ꎺ�ꖃ���˽�LED���@Щ���ԣ���(du��)�����Ǻ���Ҫ�ģ���?y��n)鲻ͬ��͵Ĕ?sh��)�a�ܣ�����������Ӳ���·�в�⣬���̷���Ҳ�Dz�ͬ�ġ��D2�ǹ�ꎺ�ꖘO��(sh��)�a�ܵă�(n��i)���·�������İl(f��)��ԭ����һ�ӵģ�ֻ���������Դ�O�Բ�ͬ���ѡ��ɫ�мt���G���{(l��n)���S�ȎN��led��(sh��)�a�V�����ڃx�����r(sh��)犣�܇վ����늵Ȉ�(ch��ng)�ϡ��x�Õr(sh��)Ҫע��a(ch��n)Ʒ�ߴ��ɫ�����ģ����ȣ����L(zh��ng)�ȡ�
3������оƬ���ڼt��ܽ��չ���̖(h��o)��a(ch��n)�����}�_���β�����(w��n)������Ҫ���γ�߅�ض��͵�늉����η����Ƭ�C(j��)̎����
����һ��555���r(sh��)��
555���r(sh��)���ɱ��ͣ����ܿɿ���ֻ��Ҫ��ӎׂ�(g��)��衢��ݣ��Ϳ��Ԍ�(sh��)�F(xi��n)���C��ʎ�����η�(w��n)�B(t��i)�|�l(f��)����ʩ�����|�l(f��)�����}�_�a(ch��n)���c׃�Q�·����Ҳ�����鶨�r(sh��)���V����(y��ng)���ڃx���x���������������Ӝy(c��)�����Ԅ�(d��ng)���Ƶȷ��档
��������74ϵ��оƬ
74ϵ��оƬ������74LS18�p��ݔ���c���T��ʩ�����|�l(f��)����74LS19����������ʩ�����|�l(f��)����74132��74LS132��74S132��74F132��74HC132��2ݔ���c��ʩ�����|�l(f��)���|�l(f��)��74221��74LS22174 HC221��74 C221�p�η�(w��n)�B(t��i)���C��ʎ������ʩ�����|�l(f��)����
��������LM393
LM393���p늉����^�������·���ɱ��ͣ����ܿɿ������ɷ���Ľӳ�����ݔ���t�����^���·��߿��ɔ_����
�C�Ͽ��]�����������أ����n���O(sh��)Ӌ(j��)���üt�⌦(du��)�ܜy(c��)�٣�LED��(sh��)�a���@ʾ��NE555������оƬ
2.4���w�O(sh��)Ӌ(j��)���w��܈D��D1

�D1 ���w��܈D
�ɿ��w��܈D��֪������(g��)�O(sh��)Ӌ(j��)��51��Ƭ�C(j��)�����w���Ѓɂ�(g��)ݔ�룬�քe��t����ղ���ݔ�룬���Iݔ�벿��ݔ�룻�ɂ�(g��)ݔ������(sh��)�a��ݔ�������Q��ݔ����
2.5���w�������O(sh��)Ӌ(j��)��51��Ƭ�C(j��)�锵(sh��)��(j��)̎�������ģ��t�⌦(du��)����ɔ�(sh��)��(j��)�IJɼ������I��ݔ�벿�֣���λ�˶Δ�(sh��)�a�ܺͷ��Q����ݔ�����֡������r(sh��)�������ɼt�⌦(du��)�ܲɼ���(sh��)��(j��)����(j��ng)555���r(sh��)�����κ�������Ƭ�C(j��)�ⲿ�Д�P3^2�M(j��n)��̎����Ȼ������λ�˶Δ�(sh��)�a���M(j��n)���@ʾ����(sh��)�a��λ�xP1^4~P1^7�ڿ��ƣ����x��P0��8λ���ƣ����ⰴ�I�ͷ��Q����P1^5~P1^7���ơ�
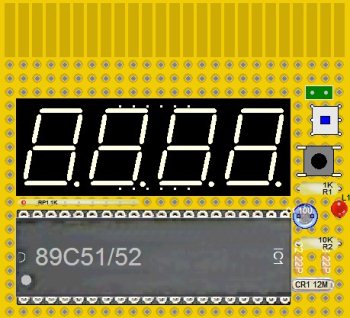
����Ӳ���O(sh��)Ӌ(j��)3.1 STC89C51оƬSTC89C51��һ��(g��)���ģ�������CMOS8λ��Ƭ�C(j��)��Ƭ��(n��i)�������������c(di��n)��40��(g��)���_�����_�D��D1-1��ʾ����4kBytesFlashƬ��(n��i)����惦(ch��)����128bytes���S�C(j��)��ȡ��(sh��)��(j��)�惦(ch��)����RAM����32��(g��)�ⲿ�p��ݔ��/ݔ����I/O���ڣ�5��(g��)�Д���(y��u)�ȼ�(j��)2���Д�Ƕ���Д࣬2��(g��)16λ�ɾ��̶��r(sh��)Ӌ(j��)��(sh��)��,2��(g��)ȫ�p������ͨ�ſڣ����T����WDTC���·��Ƭ��(n��i)�r(sh��)���ʎ����
���⣬STC89C51�O(sh��)Ӌ(j��)����������ʎ�l�ʿɞ�0Hz����ͨ�^ܛ���O(sh��)��ʡ�ģʽ�����eģʽ�£�CPU��ͣ��������RAM���r(sh��)Ӌ(j��)��(sh��)�������пڣ����Д�ϵ�y(t��ng)���^�m(x��)���������ģʽ���Y(ji��)��ʎ��������RAM�Ĕ�(sh��)��(j��)��ֹͣоƬ��������ֱ�����Д༤���Ӳ����(f��)λ��ͬ�r(sh��)ԓоƬ߀����PDIP��TQFP��PLCC�����N���b��ʽ�����m��(y��ng)��ͬ�a(ch��n)Ʒ������STC89C51��Ƭ�C(j��)���_�D��D2

�D2 ��Ƭ�C(j��)���_�D
��ϵ�y(t��ng)���Æ�Ƭ�C(j��)STC89C51����ƺ��ģ�ϵ�y(t��ng)��Ҫ��������ģ�K�����I����ģ�K���t�⌦(du��)�ܺ�555оƬģ�K�����挦(du��)��ģ�K���O(sh��)Ӌ(j��)��һ�M(j��n)��Փ�C���^��
3.2�Դģ�K������ģ�K��Ƭ�C(j��)��(f��)λ�r(sh��)ֻҪ����RST���_��2us�ĸ��ƽ���ɡ��چ�Ƭ�C(j��)����(d��ng)0.1S�����C�ɶ˵�늉����m(x��)��늞�5V���@�Ǖr(sh��)��10K���ɶ˵�늉��ӽ���0V��RST̎�ڵ��ƽ����ϵ�y(t��ng)������������(d��ng)���I���µĕr(sh��)���_�P(gu��n)��(d��o)ͨ���@��(g��)�r(sh��)����݃ɶ��γ���һ��(g��)��·����ݱ���·�������ڰ��I���µ��@��(g��)�^���У�����_ʼጷ�֮ǰ���������S���r(sh��)�g�����ƣ���ݵ�늉���0.1S��(n��i)����5Vጷŵ�׃?y��u)��?.5V��������С������(j��)��(li��n)�·늉����֮̎�ͣ��@��(g��)�r(sh��)��10K���ɶ˵�늉���3.5V��������������RST���_�ֽ��յ����ƽ����Ƭ�C(j��)ϵ�y(t��ng)�Ԅ�(d��ng)��(f��)λ��
��Ӿ������_XTAL1��TXAL2���ⲿ������{(di��o)��ݵ�һ�ˡ���ʎ�·���l�ʾ��Ǿ��w�Ĺ����l�ʡ������·�Y(ji��)�φ�Ƭ�C(j��)��(n��i)���·�a(ch��n)����Ƭ�C(j��)����ĕr(sh��)��l�ʡ���������l��Խ�ߣ���Ƭ�C(j��)�\(y��n)���ٶ�Խ�졣��Ƭ�C(j��)һ��ָ��Ĉ�(zh��)�ж��ǽ����ھ����ṩ�ĕr(sh��)��l���ϡ�
�����ϵ�y(t��ng)߀�O(sh��)�������i�_�P(gu��n)�Á���������(g��)�·��
ģ�Kԭ��D��D3

�D3 �Դģ�K�;���ģ�K�D
3.3��(sh��)�a���@ʾģ�K1����(sh��)�a�ܵķ��
��(sh��)�a�ܰ��Δ�(sh��)�֞��߶Δ�(sh��)�a�ܺͰ˶Δ�(sh��)�a�ܣ��˶Δ�(sh��)�a�ܱ��߶Δ�(sh��)�a�ܶ�һ��(g��)�l(f��)����O�܆�Ԫ������һ��(g��)С��(sh��)�c(di��n)�@ʾ���������@ʾ���ق�(g��)��8���ɷ֞�1λ��2λ��4λ�ȵȔ�(sh��)�a�ܣ����l(f��)����O�܆�Ԫ�B�ӷ�ʽ�֞鹲ꖘO��(sh��)�a�ܺ�ꎘO��(sh��)�a�ܡ���ꖔ�(sh��)�a����ָ�����аl(f��)����O�ܵ�ꖘO�ӵ�һ���γɹ���ꖘO(COM)�Ĕ�(sh��)�a�ܡ���ꖔ�(sh��)�a���ڑ�(y��ng)�Õr(sh��)��(y��ng)�������OCOM�ӵ�+5V����(d��ng)ijһ�ֶΰl(f��)����O�ܵ�ꎘO����ƽ�r(sh��)������(y��ng)�ֶξ��c(di��n)������(d��ng)ijһ�ֶε�ꎘO����ƽ�r(sh��)������(y��ng)�ֶξͲ�����ꎔ�(sh��)�a����ָ�����аl(f��)����O�ܵ�ꎘO�ӵ�һ���γɹ���ꎘO(COM)�Ĕ�(sh��)�a�ܡ���ꎔ�(sh��)�a���ڑ�(y��ng)�Õr(sh��)��(y��ng)�������OCOM�ӵ��ؾ�GND�ϣ���(d��ng)ijһ�ֶΰl(f��)����O�ܵ�ꖘO����ƽ�r(sh��)������(y��ng)�ֶξ��c(di��n)������(d��ng)ijһ�ֶε�ꖘO����ƽ�r(sh��)������(y��ng)�ֶξͲ�����
2����λ�˶ι�ꎔ�(sh��)�a�ܼ��������
51ϵ�еĆ�Ƭ�C(j��)�������ͨ,�]�Џ�(qi��ng)ݔ���ĵ�Ԓ,���y�(q��)��(d��ng)��(sh��)�a��,�ڌ�(sh��)�H��(y��ng)����,һ������Ҫ�������O���(q��)��(d��ng)�ġ�
��(sh��)�a�ܵ����Ӌ(j��)��:ÿ��(g��)�ε��������8,�ͮ�(d��ng)���õ��Ǽtɫ��,�@����������O(sh��)Ӌ(j��)��5~10mA,�@�ӵ�Ԓ,��(d��ng)�@ʾ��(sh��)��8���c(di��n)�r(sh��),�������40~80mA,��Ƭ�C(j��)�Ǻ��yֱ��ݔ���@ô��������,������Ҫ���(q��)��(d��ng).�ù�ꖔ�(sh��)�a��,P0����ݔ���͟o�����������ˡ�
�ˈ�(b��o)���У���(sh��)�a�ܵĶ��x��P0�ڣ����������r(sh��)����s��5~10mA,������P0�ڽ�1k���������ṩ5mA���ҵ��·ʹ��(sh��)�a������������
��(sh��)�a�ܼ��������D��D4
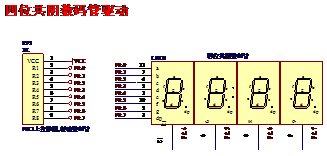
�D4 ��(sh��)�a�ܼ��������D
3.4���Q��������Դ���Q���c�oԴ���Q���ą^(q��)�e��
1����(n��i)���^(q��)�e����Ҫע������@��ġ�Դ������ָ�Դ������ָ��ʎԴ�� Ҳ�����f����Դ���Q����(n��i)������ʎԴ������ֻҪһͨ늾͕�(hu��)�С����oԴ��(n��i)��������ʎԴ�����������ֱ����̖(h��o)�o�������Q�С���Դ���Q�������ȟoԴ���F��������?y��n)��������(g��)��ʎ�·��
2�����^�^(q��)�e�����ߵĸ߶����Ѕ^(q��)�e����Դ���Q�����߶Ȟ�9mm�����oԴ���Q���ĸ߶Ȟ�8mm���猢�ɷN���Q�������_�����Ϸ��Õr(sh��)�����Կ����оGɫ�·���һ�N�ǟoԴ���Q�����]���·����ú��z���]��һ�N����Դ���Q����
3����e��ʽ�����ˏ����^�ρ������M(j��n)һ���Д���Դ���Q���͟oԴ���Q����߀�������f�ñ����nRxl�n�y(c��)ԇ:�úڱ��P�ӷ��Q�� "-"���_���t���P����һ���_�ρ������|������|�l(f��)���ǡ����������ֻ��8��(��16��)���ǟoԴ���Q��;����ܰl(f��)�����m(x��)���ģ�������ڎװٚW���ϵģ�����Դ���Q����
��Դ���Q��ֱ�ӽ����~���Դ(�µķ��Q���ژ�(bi��o)���϶���ע��)�Ϳ��B�m(x��)�l(f��);���oԴ���Q���t��늴œP(y��ng)��һ�ӣ���Ҫ�������lݔ���·�в��ܰl(f��)��
�oԴ���Q���ă�(y��u)�c(di��n)�ǣ�
1�����ˣ�
2�����l�ʿɿ� �����������������װl(f��)����������Ч����
3����һЩ�����У����Ժ�LED��(f��)��һ��(g��)���ƿ���Դ���Q���ă�(y��u)�c(di��n)�dz�����Ʒ��㡣
���ڿ��^�l���c��(j��ng)��(j��)�������ޣ���ϵ�y(t��ng)���ßo�����Q����ʹ��s9012���O���(q��)��(d��ng)�����Q��ԭ��D��D5:
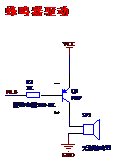
�D5 ���Q��ԭ��D
3.5���I�������õİ��I�����N���C(j��)е�|�c(di��n)ʽ���I����(d��o)����zʽ�������I���ַQ�|��ʽ�I�P����
�C(j��)е�|�c(di��n)ʽ���I�����ÙC(j��)е����ʹ�I��(f��)λ���ָ����@���B����������ˇ��(ji��n)�Σ��m�φμ����졣�����|�c(di��n)̎������҉m����(d��o)�½��|�������w�e����(du��)�^��(d��o)����z���I���������z�ď��ԁ��(f��)λ��ͨ�^���Ƶķ�������������еİ��I�Ƴ�һ�K���w�eС���b�䷽�㣬�m���������a(ch��n)�����Ǖr(sh��)�g�L(zh��ng)�ˣ����z�ϻ���ʹ�����½���ͬ�r(sh��)������҉m��
�����I�ǽ����Ѹ�ٰl(f��)չ��һ�N���Ͱ��I�����Է֞����ͺ�ƽ���̓ɷN�������I������c(di��n)�Ƿ��m�����������g���������^���bǶ���㡣�������κ����IJ��֡�ɫ�ʡ��I��ɰ������C(j��)��Ҫ����O(sh��)Ӌ(j��)��
�I�P��������Ҫ���]ȥ����(d��ng)�Ć��}����(d��ng)�y(c��)ԇ�������I������֮�o�������M(j��n)��ȥ����(d��ng)̎������?y��n)��I�ǙC(j��)е�_�P(gu��n)�Y(ji��)��(g��u)�����ڙC(j��)е�|�c(di��n)�ď��Լ�늉�ͻ����ԭ�����|�c(di��n)�]�ϻ���_��˲�g��(hu��)���F(xi��n)늉�����(d��ng)���鱣�C�I�R(sh��)�e�Ĝ�(zh��n)�_����늉���̖(h��o)����(d��ng)����r�²����M(j��n)���Р�B(t��i)ݔ�롣������M(j��n)��ȥ����(d��ng)̎����ȥ����(d��ng)��Ӳ����ܛ���ɷN������Ӳ���������Ǽ�ȥ����(d��ng)�·���ĸ����ϱ��ⶶ��(d��ng)�Įa(ch��n)����ܛ���������ڵ�һ�Ιz�y(c��)�����I���r(sh��)����(zh��)��һ���ӕr(sh��)����֮���ٙz�y(c��)�˰��I������ڶ��Ιz�y(c��)�Y(ji��)���Ԟ鰴� �B(t��i)��CPU��_�J(r��n)�˰��I�����£������˶���(d��ng)��
�������ڿ��^�l���c��(j��ng)��(j��)�������ޣ���ϵ�y(t��ng)���ÙC(j��)е�|�c(di��n)ʽ���I�����Ă�(g��)���քe���(f��)λ�I���ГQ�I�������I��
���I����ԭ��D��D6��
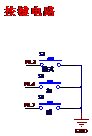
�D6 ���Iԭ��D
3.6�t�ⲿ���t�⌦(du��)���f��
�t�⌦(du��)���Ǽt�⾀�l(f��)����c�������չܣ����t�⾀���չܣ����t�⾀�����^�����һ��ʹ�Õr(sh��)��Ŀ��Q���t�⾀���չܼt�⾀���չܹ����c�������չ�����ֻ�Dz��ܿ�Ҋ��ĸɔ_���й���e���`���ȸߣ����ڹ������O�ܣ�һ��ֻ��(du��)�t�⾀�з���(y��ng)��
�t����չ��ڼt��⾀�������r�£����������l(f��)�����^���׃�������ô����ԣ����t����չ��cһ���m��贮(li��n)�������c�o���Օr(sh��)����ݔ����ͬ늉���
��D8�B�Ӝy(c��)ԇ�·���{(di��o)��(ji��)R5��R4����ֵ����(d��ng)���չܽ��յ��t���r(sh��)�����չ܃ɶ�늉��s�飱�֣���(d��ng)�t��⾀���ړ��r(sh��)�����չ܃ɶ�늉��s��4V��Ȼ��ʹ��555�ӳ�˹�����|�l(f��)��ݔ������
�D7��t�����ԭ��D
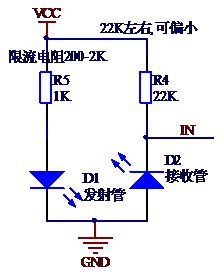
�D7�t�����
3.7���β���555���r(sh��)���ɱ��ͣ����ܿɿ���ֻ��Ҫ��ӎׂ�(g��)��衢��ݣ��Ϳ��Ԍ�(sh��)�F(xi��n)���C��ʎ�����η�(w��n)�B(t��i)�|�l(f��)����ʩ�����|�l(f��)�����}�_�a(ch��n)���c׃�Q�·����Ҳ�����鶨�r(sh��)���V����(y��ng)���ڃx���x���������������Ӝy(c��)�����Ԅ�(d��ng)���Ƶȷ��档
����(n��i)�������ɂ�(g��)늉����^��������(g��)��ֵ��(li��n)��裬һ��(g��)RS�|�l(f��)����һ��(g��)��늹�T������ݔ����(j��)�����ṩ�ɂ�(g��)����(zh��n)늉�VCC/3��2VCC/3��
555���r(sh��)���Ĺ�����Ҫ�Ƀɂ�(g��)���^���Q�����ɂ�(g��)���^����ݔ��늉�����RS �|�l(f��)���ͷ�늹ܵĠ�B(t��i)�����Դ�c��֮�g����늉�����(d��ng)5�_�ҿՕr(sh��)���t늉����^��C1�ķ���ݔ��˵�늉��� 2VCC/3��C2 ��ͬ��ݔ��˵�늉���VCC /3�����|�l(f��)ݔ���TR��늉�С��VCC/3���t���^�� C2��ݔ����0����ʹ RS�|�l(f��)����1��ʹݔ����OUT=1������ֵݔ��� TH ��늉�����2VCC/3��ͬ�r(sh��)TR�˵�늉�����VCC/3���tC1��ݔ����0��C2��ݔ����1���Ɍ� RS�|�l(f��)����0��ʹݔ����0�ƽ��
���ĸ���(g��)���_�������£�
1. 1�_������Դؓ(f��)��VSS��ӵأ�һ����r�½ӵء�
2. 2�_�����|�l(f��)�ˡ�
3.3�_��ݔ����Vo��
4. 4�_����ֱ������ˡ���(d��ng)�˶˽ӵ��ƽ���t�r(sh��)���·���������˕r(sh��)��ՓTR��TH̎�ں��ƽ���r(sh��)���·ݔ���顰0����ԓ�˲��Õr(sh��)��(y��ng)�Ӹ��ƽ��
5. 5�_��VC�����늉��ˡ����˶����늉����t�ɸ�׃��(n��i)��?j��)ɂ�(g��)���^���Ļ���(zh��n)늉�����(d��ng)ԓ�˲��Õr(sh��)����(y��ng)��ԓ�˴���һֻ0.01��F��ݽӵأ��Է�����ɔ_��
6. 6�_��TH���|�l(f��)�ˡ�
7. 7�_����늶ˡ�ԓ���c��늹ܼ�늘O���B���������r(sh��)���r(sh��)��ݵķ�늡�
8. 8�_������ԴVCC���p�O�͕r(sh��)���·VCC�ķ�����4.5 ~ 16V��CMOS�͕r(sh��)���·VCC�ķ�����3 ~ 18V��һ����5V��
555оƬ�ӿ����D�����·�nj�555��ʩ�����|�l(f��)������(du��)����������ݔ������̖(h��o)�M(j��n)�����Σ�Ȼ����ݔ���o��Ƭ�C(j��)���ⲿ�Д���M(j��n)��Ӌ(j��)��(sh��)��������Ч�p��Ӌ(j��)��(sh��)�ɔ_��
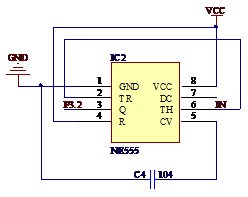
�D8 NE555ԭ��D
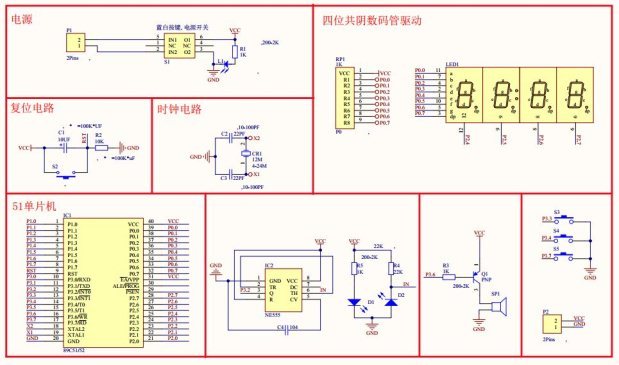
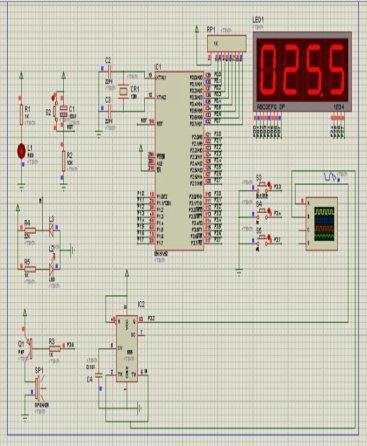
3.8Ӳ������ԭ��D
3.9 �������O(sh��)Ӌ(j��)ͨ�^�@���n���O(sh��)Ӌ(j��)���(y��n)�C����ǰ�ܶ�IJ��_���ԣ��磺�ǷN�҂�ʹ�õı��^С�ľ��ܷ���d�҂���Ҫ����������O�ܻ��O��������Լ���늘O���������Ӌ(j��)�㡢�����[�Ō�(du��)����(g��)�f�ð庸�ӕr(sh��)�ķ���̶ȡ��Լ�ģ�;��Ͷξ����x���ӕr(sh��)��һЩС��(x��)��(ji��)��
����(du��)�ڸ��NԪ�������f��������̵��w��(hu��)���䔵(sh��)��(j��)�փ�(c��)�Č�(sh��)���ԣ���߀��Ҫ���]�䔵(sh��)��(j��)�փ�(c��)�M��ʹ��Ӣ�İ�ģ����İ�Ĕ�(sh��)��(j��)�փ�(c��)�����ڷ��g�ĕr(sh��)���(hu��)���F(xi��n)��©��
���O(sh��)Ӌ(j��)Ӳ�����^�У�Ҫ��ֿ��]������߾���(du��)��ĺ��ӕr(sh��)��Ӱ푣�ͬ�r(sh��)ҲҪ���]�����ڌ�(du��)������늚�z��r(sh��)�ķ���̶ȣ��@�������ں��ھS�o(h��)�����������Ŀɿ��ԡ�
����(j��)�Լ���(d��ng)�ֵČ�(sh��)�H��r�����Y(ji��)���Լ������O(sh��)Ӌ(j��)��Ӳ�����ӷ���IJ���֮̎����(j��ng)�^�Լ������⣬���Y(ji��)����һЩ�P(gu��n)�ڌ�(sh��)�ﺸ�ӵ�ע�����(xi��ng)��
���պ�����F�ĜضȺͺ��ӕr(sh��)�g���x��ǡ��(d��ng)?sh��)����F�^�ͺ��c(di��n)�Ľ��|λ�ã��ſ��ܵõ��� �õĺ��c(di��n)�����_���ֹ����Ӳ����^�̿��Էֳ��傀(g��)���E��
���Eһ����(zh��n)��ʩ���������ú��z�����������F���M(j��n)��亸��B(t��i)��Ҫ�����F�^���ָɃ����o��������������ڱ������һ�Ӻ��a��
���E�����ӟẸ�������ڃɺ������B��̎���ӟ�����(g��)����ȫ�w���r(sh��)�g��s��1��2��犡���(du��)����ӡ�ư��Ϻ���Ԫ�������f��Ҫע��ʹ���F�^ͬ�r(sh��)���|�ɂ�(g��)�������
���E�������뺸�z�����ĺ����汻�ӟᵽһ���ضȕr(sh��)�����a�z�����F��(du��)����|������ע�⣺��Ҫ�Ѻ��a�z�͵����F�^�ϣ�
���E�ģ����_���z��(d��ng)���z�ۻ�һ����������������45�㷽�����_���z��
���E�壺���_���F���a�������P�ͺ�����ʩ����λ�Ժ�������45�㷽�����_���F���Y(ji��)�����ӡ��ĵ������_ʼ�����岽�Y(ji��)�����r(sh��)�g��sҲ��1��2�롣
1.�������F�^���坍��
2.�����ӽ��|��e���ӿ���ᣬ�ӟ�Ҫ�����a��
3.���F���x���v�������F�ij��xҪ���r(sh��)�����ҳ��x�r(sh��)�ĽǶȺͷ����c���c(di��n)���γ����P(gu��n) ���M��ʹ���a�ʬF(xi��n)�������F�ͣ���ֹ���F(xi��n)̓���F(xi��n)��
4.�ں��a����֮ǰ���ܡ�
5.���a����Ҫ�m�У��^��ĺ��a���H���M(f��i)���ϣ����Ҷ��������̓�������{(di��o)ԇ���ӵ��^���г��F(xi��n)�ܶ���ƽ��|�������}��������{(di��o)ԇ�^�̲��㡣
6..��Ҫʹ�����F�^�����\(y��n)�ͺ��a�Ĺ��ߡ�
1.�Π����ƈA�F�����������ݣ������ �Ժ��ӌ�(d��o)�������ģ���(du��)�Q��ȹ��չ�_��̓���c(di��n)�ı��������������������b�e������
2.���c(di��n)�ϣ����ϵ��B����ʰ�����Ȼ�^�ɣ����a�ͺ����Ľ���̎ƽ�������|�DZM����С
3.����ƽ�����н��ٹ�ɡ�
4.�o�Ѽy��ᘿס��A����
4���f�ܰ庸�Ӽ���
���҂����Ӱ��ӵ��^���У����ں��ӻ������IJ�����(sh��)������·���·�����˲��ֲ�������ͺ��a�����������⣬ȱ������������@Щ���}����Ҫԭ��֮һ������һЩ���ɿ���ʹ�·��ӳ����(sh��)��Ӳ���ď�(f��)�s�̶ȴ�ͣ��p���w���Ĕ�(sh��)�����·���ӷ�(w��n)����������Լ����ӵĸ���Մ?w��)�PCB�ĺ��Ӽ��ɡ�
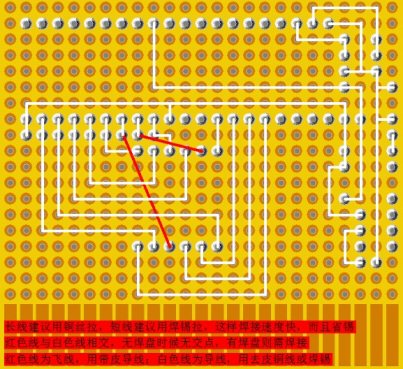
1.�����_���Դ���ؾ��IJ��֣��Դ؞���·ʼ�K���������Դ����(du��)��(ji��n)���·��ʮ���P(gu��n)�I�����á�ijЩPCB������؞�����K���ӵ��~������(y��ng)���������Դ���͵ؾ�������o����~������Ҳ��Ҫ��(du��)�Դ�����ؾ��IJ����Ђ�(g��)������Ҏ(gu��)����
2.��������Ԫ���������_��PCB�ĺ�����Ҫ�����Ŀ�ӡ������ȣ���Ҫ���ڼ���Ԫ������������_���Еr(sh��)��ֱ�ӿ�ӵ��܇����B�ӵ�Ԫ�������_�ϕ�(hu��)�°빦�������⣬������(ji��)�s���ϵ�Ŀ�ģ����Ѽ����Ԫ�������_�ռ��������������ò��ϡ�
3.�����O(sh��)���������eҪ��(qi��ng)�{(di��o)�@һ�c(di��n)��������O(sh��)���������H���Ժ�(ji��n)���B��������Ҫ���^�öࡣ
4.��������Ԫ���������ĽY(ji��)��(g��u)���P�ߺ��ӵľ���I�P���@��һ��(g��)������Ԫ���������Y(ji��)��(g��u)�ĵ������ӣ��D�е��p�|ʽ���I��4ֻ�_�����ЃɃ���ͨ���҂�����������@һ���c(di��n)����(ji��n)���B����늚���ͨ�ă�ֻ�_�䮔(d��ng)��������
5.����������ᘣ�������S���`����÷�������ɉK�������B���Ϳ�������ᘺ���������ᘼ����˃ɉK�����g�ęC(j��)е�B����������늚��B�ӵ����á��@һ�c(di��n)���b����X�İ忨�B�ӷ�����
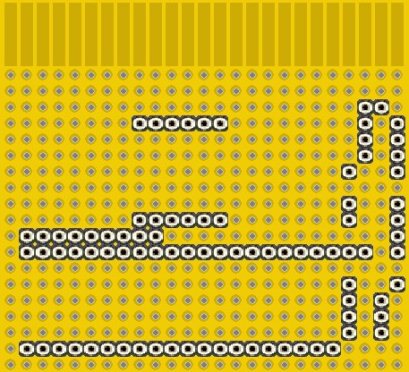
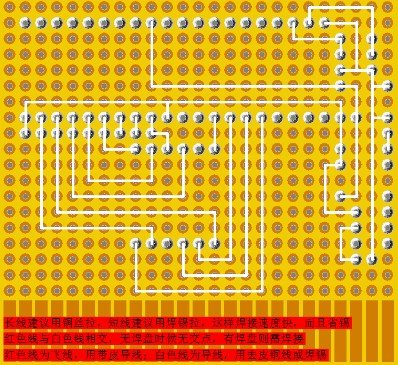
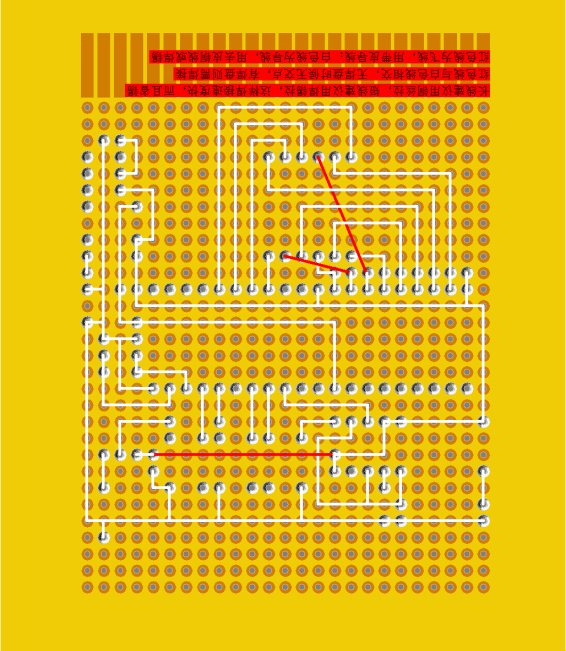
3.10���ӌ�(sh��)��D
�ġ�ܛ���O(sh��)Ӌ(j��)4.1 Keil C��(ji��n)�������O(sh��)Ӌ(j��)ʹ��keil ܛ���M(j��n)�г���ľ��c���g��Keil C51������Keil Software��˾��Ʒ��51ϵ�м��݆�Ƭ�C(j��)C�Z��ܛ���_�l(f��)ϵ�y(t��ng)���c�R����ȣ�C�Z���ڹ����ϡ��Y(ji��)��(g��u)�ԡ����x�ԡ��ɾS�o(h��)���������@�ă�(y��u)��(sh��)������W(xu��)���á�Keil�ṩ�˰���C���g������R�����B�������������һ��(g��)����(qi��ng)��ķ����{(di��o)ԇ�����ڃ�(n��i)�������_�l(f��)������ͨ�^һ��(g��)�����_�l(f��)�h(hu��n)����uVision�����@Щ���ֽM����һ��KeiluVision2������KeilSoftware��˾��Ʒ��51ϵ�м��݆�Ƭ�C(j��)C�Z��ܛ���_�l(f��)ϵ�y(t��ng)��ʹ�ýӽ��ڂ��y(t��ng)C�Z�Ե��Z�����_�l(f��)���c�R����ȣ�C�Z���W(xu��)����,���Ҵ�������˹���Ч�ʺ��(xi��ng)Ŀ�_�l(f��)����,��߀��Ƕ��?y��n)R�������������P(gu��n)�I��λ��Ƕ�룬ʹ�����_(d��)���ӽ��څR���Ĺ���Ч�ʡ�KEILC51��(bi��o)��(zh��n)C���g����8051��������ܛ���_�l(f��)�ṩ��C�Z�ԭh(hu��n)��,ͬ�r(sh��)�����˅R�����a��Ч,���ٵ����c(di��n)��C51���g���Ĺ��ܲ�������(qi��ng)��ʹ����Ը����N��CPU�������������������a(ch��n)Ʒ��C51�ѱ���ȫ���ɵ�uVision2�ļ����_�l(f��)�h(hu��n)���У��@��(g��)�����_�l(f��)�h(hu��n)�����������g�����R��������(sh��)�r(sh��)����ϵ�y(t��ng)���(xi��ng)Ŀ���������{(di��o)ԇ����uVision2 IDE�ɞ������ṩ��һ���`����_�l(f��)�h(hu��n)����
4.2ϵ�y(t��ng)����
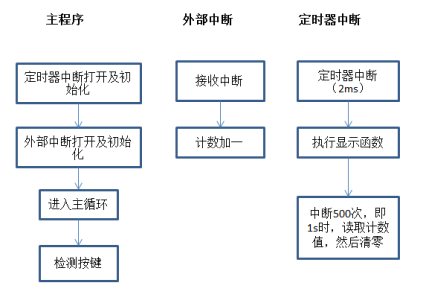
�D9 �������̈D
������(sh��)��
- ���_���r(sh��)���Д���ⲿ�Дࡣ
- �M(j��n)����ѭ�h(hu��n)��
- �z�y(c��)���I��
- �z�y(c��)�D(zhu��n)�ٳ��~����ÿ���D(zhu��n)�ٳ��^�~��ֵ�����Q��푡�
�ⲿ�Дࣺ
1 ) �z�y(c��)��P3^2�ڵ��ƽ��Ӌ(j��)��(sh��)ֵ��һ��
���r(sh��)������:
1) ���r(sh��)���O(sh��)�ö��r(sh��)2ms���Д��{(di��o)���@ʾ����(sh��)����ÿ2ms�{(di��o)���@ʾ����(sh��)һ�Σ��Ô�(sh��)�a�܄�(d��ng)�B(t��i)����ķ�����ʹ��(sh��)�a�܌�(sh��)�F(xi��n)��(d��ng)�B(t��i)�@ʾ��
2) ���r(sh��)��Ӌ(j��)�r(sh��)�Д�500�μ�ÿ��1s�r(sh��)�xȡ�ⲿ�Д��Ӌ(j��)��(sh��)ֵ
5.1 ����ܛ����(ji��n)��Proteus����Labcenter Electronics�_�l(f��)�Ĺ���(qi��ng)��Ć�Ƭ�C(j��)����ܛ�����F(xi��n)�����°汾6.9 SP5������ʾ�汾������ٷ��W(w��ng)վ���d��
Proteus�c�����ķ���ܛ������^��������ă�(y��u)�c(di��n)
1���ܷ���ģ�M�·����(sh��)���·����(sh��)ģ����·��
2�����L��ԭ��D��PCB�D��
3����������(sh��)�H������ʹ�õăx�� ��
4�����������c(di��n)�����܉�?q��)���Ƭ�C(j��)�M(j��n)�Ќ�(sh��)�)(j��)�ķ��档�ij���ľ��������g���{(di��o)ԇ��Ŀ��(bi��o)��ķ���һ��(y��ng)��ȫ��֧�օR���Z�Ժ�C�Z�Եľ��̡�߀�����Keil C��(sh��)�F(xi��n)�����(li��n)���{(di��o)ԇ����Proteus���L�Ƶ�ԭ��D���錍(sh��)�H�е�Ŀ��(bi��o)�壬����Keil C���ɭh(hu��n)����(sh��)�F(xi��n)��(du��)Ŀ��(bi��o)��Ŀ��ƣ��c��(sh��)�H��ͨ�^Ӳ����������(du��)Ŀ��(bi��o)����{(di��o)ԇ����ȫ��ͬ������֧�ֶ��@ʾ�����{(di��o)ԇ����Proteus�\(y��n)����һ�_(t��i)Ӌ(j��)��C(j��)�ϣ���Keil C�\(y��n)������һ�_(t��i)Ӌ(j��)��C(j��)�ϣ�ͨ�^�W(w��ng)�j(lu��)�B�ӌ�(sh��)�F(xi��n)�h(yu��n)�̵��{(di��o)ԇ��
5.2Ӳ���{(di��o)ԇӲ���{(di��o)ԇ��ᘌ�(du��)��Ƭ�C(j��)�����M(j��n)�е��{(di��o)ԇ�������֮ǰ���ȴ_���·�в����ڔ�·���·��r���@һ����������(g��)�{(di��o)ԇ�����ĵ�һ����Ҳ�Ƿdz���Ҫ��һ��(g��)���E�����@�����{(di��o)ԇ����Ҫʹ�õĹ������f�ñ����Á���əz�y(c��)�·���Ƿ���ڔ�·���߶�·��r���΄�(w��)��ע�⺸�c(di��n)֮�g���_�����c(di��n)�]�ж̽���һ��ͬ�r(sh��)ע�⺸�c(di��n)�����^���_���]���_·�Լ���·�ĬF(xi��n)����F(xi��n)��
�ڴ_��Ӳ���·�����ҟo������r����·���·������r�·�������{(di��o)ԇ������{(di��o)ԇ�Ŀڵ��Ǚz�y(c��)��Ƭ�C(j��)���Ʋ��֡���(sh��)�a���c(di��n)�����֡������l�D(zhu��n)�Q�·Ӳ���{(di��o)ԇ��
1����(sh��)�a��LED�·�{(di��o)ԇ����ͨ�Դ���������_�_�P(gu��n)���Կ�����(sh��)�a���@ʾ��(sh��)�֡�
2�����I�{(di��o)ԇ����ͨ�Դ�����°��Iһ����(sh��)�a�������ГQ��
3���t�⌦(du��)���{(di��o)ԇ����ͨ�Դ���ü�Ƭ�ļt�⌦(du��)�����g���^���ɿ�����(sh��)�a�����@ʾ��
5.3ܛ���{(di��o)ԇ�{(di��o)ԇ��Ҫ�����ͼ��ɣ�ͨ��һ��(g��)�{(di��o)ԇ����(y��ng)ԓ���������ķN���ܣ���ۙ�����c(di��n)���鿴׃�������Ĕ�(sh��)ֵ������(g��)������һ��(g��)�������{(di��o)�ø���(g��)�ӳ���?q��)��F(xi��n)���ܵ��^�̣�Ҫʹ�����������(g��)������ƽ��(w��n)�\(y��n)�У�����(g��)ģ�K���ӳ�������_�cƽ��(w��n)�\(y��n)�бز����٣�������ܛ���{(di��o)ԇ������A�ξ��ǰѸ���(g��)�ӳ����M(j��n)�зքe�{(di��o)ԇ��
1����(sh��)�a���{(di��o)ԇ����(sh��)�a���{(di��o)ԇ������Ҫ����(sh��)�a�ܿ��Ԍ�(sh��)�F(xi��n)���N��ͬ�����̣��{(di��o)ԇЧ���D��D10��



�D10 ���N��ͬ���̵Ĕ�(sh��)�a���@ʾЧ��
2��ݔ�벿���{(di��o)ԇ������proteus�����Пo����(sh��)�F(xi��n)ģ�M�t�⌦(du��)�ܵČ�(sh��)�HЧ�������������Ҳ�����t��ݔ����늉����Σ���555���Σ�ԭ��D������Ч����D11
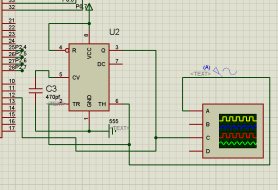
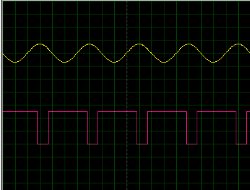
�D11 555�ӳ�˹�����|�l(f��)��������Ч��
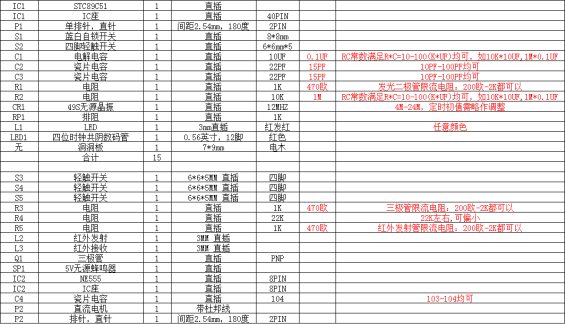
5.4ʹ���f��1����Ƭ�C(j��)�քe��VCC��GNDʹ��Ƭ�C(j��)̎�ڹ�늠�B(t��i)��
2������TXD��RXD������?q��)����Ƭ�C(j��)�У�
3�����������_�P(gu��n)���ɵ�ָʾ������(sh��)�a���@ʾ000.0��
4��늙C(j��)�b�������ڼt�⌦(du��)�����g�������r(sh��)��(sh��)�a�ܼ����@ʾ��(d��ng)ǰƽ��1s���D(zhu��n)�١�
ܛӲ������D��
�����O(sh��)Ӌ(j��)���Y(ji��)�c�w��(hu��)�M(j��n)����һ��(g��)���µ��O(sh��)Ӌ(j��)�ڲ�֪���X�нY(ji��)������(d��ng)����һ��(g��)��(x��)��(ji��)���ֵ��O(sh��)Ӌ(j��)�ϵK�r(sh��)�����ǽg�M�X֭��ɷ�M(f��i)���ģ�ͨ�^�҂��F(tu��n)�(du��)����Y���Լ�ͬ�W(xu��)�Ľ���ӑՓ���ώ�������(d��o)�c(di��n)����һ��(g��)��(g��)�y�c(di��n)��Kһһ���ơ�
ͨ�^�@�ε��O(sh��)Ӌ(j��)��ʹ�҂���(du��)�t�⾀�y(c��)�كx�Ļ���ԭ������һ��(g��)�������J(r��n)�R(sh��)��ͬ�r(sh��)Ҳʹ���������O(sh��)Ӌ(j��)�Ļ���˼��ͷ�����������(j��)�O(sh��)Ӌ(j��)Ŀ�ĺ���;���M(j��n)��ԭ�����D(zhu��n)�Q���ٴ_���·����������(j��)ԭ��D�x������Ҫ����������K�B������y(c��)ԇ���y(c��)ԇ���ٲ��������·�ͷ�����ͬ�r(sh��)�҂�Ҳ�е����҂���(sh��)�֪�R(sh��)�ąT����˼·�ľ����ԣ�Ҫ�O(sh��)Ӌ(j��)��һ��(g��)��������횿v�^ȫ�֣�֪�y���M(j��n)���J���M(j��n)ȡ����֮�@���O(sh��)Ӌ(j��)������˜\�����H�Ì�(sh��)�`얹������W(xu��)��֪�R(sh��)�����ҌW(xu��)���˽�Q��(sh��)�H���}�ķ������e���˽�(j��ng)�(y��n)���҂�?c��)��Ժ�ČW(xu��)��(x��)��(sh��)�`�Е�(hu��)�����J(r��n)���м�(x��)����(d��ng)Ȼ���@���O(sh��)Ӌ(j��)�����߀Ҫ���x�ώ���ָ��(d��o)�͎�����





 ����TQQ:125739409;���g(sh��)����QQȺ281945664
����TQQ:125739409;���g(sh��)����QQȺ281945664











 QQ���Ѻ�Ⱥ
QQ���Ѻ�Ⱥ QQ���g
QQ���g �vӍ��
�vӍ�� �vӍ����
�vӍ���� �ղ�
�ղ� ����
���� �
� ��
��