�W������
[����]
�W ̖
[�W̖]
���I(y��)�༉
[���I(y��)�༉]
��Ժ��ϵ��
[��Ժ��ϵ��]
ָ���̎����Q��
[ָ���̎����Q��]
����51�ij����y����܇��ײϵ�y(t��ng)
��ժҪ��
����51�ij����y����܇��ײϵ�y(t��ng)����B�˳����y��Ļ���ԭ����ϵ�y(t��ng)��D���o���˳����l(f��)��ͽ����·��ͨ�^ä�^(q��)������������˜y��ľ��_�ȡ����ó�����ݔ�о��x�c�r�g���Pϵ������51��Ƭ�C�M�п��Ƽ���(sh��)��(j��)̎�����OӋ�����ܾ��_�y�����c�g���x�ij���Һλ�z�yϵ�y(t��ng)��ϵ�y(t��ng)��Ҫ�ɳ����l(f��)�����·�������������·����Ƭ�C�����·�����I�·���@ʾ�·���ɡ��������OӋ���ij����y����܇��ײϵ�y(t��ng)��������е�܇���M���˜yԇ���ɼ����r��܇���x�^��ϵ�y(t��ng)���l(f��)���⾯����ʾ˾�C��������������������ϵ�y(t��ng)�������ơ������ɿ����y�����ȸߵă�(y��u)�c���Ɍ��r܇���z�y��
Ŀ � 1 �w Փ 1.1�о��ı��� 1.2�о�����Ҫ��(n��i)�� 1.3����Q���P�I���} 2 �·����Փ�C 2.1�������^ 2.1.1 ����y�� 2.1.2 �����y�� 2.2�·���w���� 3��Ƭ�C���� 3.1 STC89C51��Ҫ���� 3.2 STC89C51�ⲿ�Y�������� 3.3 STC89C51��(n��i)���M�� 4 �����y��ģ�K 4.1 ������������B 4.2 HC-SR04�����y��ģ�K���������c 4.3 HC-SR04�Ĺ��_���к�늚Ⅲ��(sh��) 4.3.1 ���_���� 4.3.2 HC-SR04��늚Ⅲ��(sh��) 4.4�����r��D 5ϵ�y(t��ng)Ӳ���·�OӋ 5.1��Ƭ�C��Сϵ�y(t��ng) 5.1.1 STC89C51оƬ 5.1.2 ��λ�· 5.1.3 �����· 5.2 ���@ʾ�·�����· 5.2.1 LED��(sh��)�a���@ʾ�· 5.2.2 ���Q����LED�� 5.3 HC-RS04�����y��ԭ�� 5.4 ���I�O���· 6ϵ�y(t��ng)������OӋ 6.1������ 6.2�@ʾ��(sh��)��(j��)�ӳ��� 6.3���ӳ��� 6.4���I�ӳ��� �Y Փ �����īI �� 䛣�A�� �� 䛣�B�� �� �x
1 �w Փ1.1�о��ı�����܇�I(y��)�c��ӘI(y��)�����繤�I(y��)�ăɴ���������S����܇���I(y��)�c��ӹ��I(y��)�IJ���l(f��)չ���ڬF(xi��n)����܇�ϣ���Ӽ��g�đ���Խ��Խ��V������܇��ӻ��ij̶�Խ��Խ�ߡ���܇��Ӽ��g����܇���g�c��Ӽ��g��Y�ϵĮa(ch��n)���܇�ϵ�����c��ӿ���ϵ�y(t��ng)����܇���g�M��C�һ�w���A�εĽ��죬��λ�O����Ҫ��������܇���g�I��l(f��)չ�ɞ�һ�T�����ķ�֧�W�ƣ������ܵă�(y��u)��ֱ��Ӱ푵���܇�Ą����ԡ���(j��ng)���ԡ��ɿ��ԡ���ȫ�ԡ��ŷŸɃ��������m�Եȡ���ӿ��Ƽ��g����܇�ϣ����ȑ����ڰl(f��)�әCȼ�����Ŀ����c�ŷ��M���c�ŷſ��ƣ������������ڵױP���ֵĿ��ƣ���������ķ�(w��n)���ԡ���ȫ�ԡ��c���m�Եȡ��S����ͨ�\ݔ����ܶȰl(f��)չ����ӿ��Ƽ��g���Mһ����������܇�ij�����ȫ�Ժ͌����ȷ��档 ��Ӽ��g����܇��ȫ����ϵ�y(t��ng)�đ�����Ҫ�Ǟ���������܇�İ�ȫ�����m�ͷ��㡣���õ���Ӽ��g��Ҫ�У���ӿ��ư�ȫ���ң�����ӛ䛃x�����_ʽ���x��������������T�i���Ԅӿ��{(di��o)���Ԅ�܇����܇�T�����Ρ���ˮ����܇�����ƣ��Դ�����Լ�������ȡ��������܇���Ԅ��{(di��o)��ϵ�y(t��ng)������ʽ��܇��ײϵ�y(t��ng)����܇�O(ji��n)�y�����\��ϵ�y(t��ng)�Լ���܇����ϵ�y(t��ng)Ҳ�õ��ˏV���đ��á� ���^ȥ20~30���У��˂���Ҫ�Ѿ�����������܇�ı��Ӱ�ȫ�Է��棬���磬����܇��ǰ������b���U�ܡ�����܇�⚤���ܰ��bij�N���Բ��ϡ���܇��(n��i)���P��λ���b���N��ʽ�İ�ȫ������ȫ���ҵȵȣ��Ԝp�p��܇��ײ������Σ�������b��ײ���U�ܹ�Ȼ����ij�N�̶��Ϝp�p��ײ�o��܇��ɓp�ģ��s�o����������ײ���w�Ă��������⣬܇�ϰ��b�İ�ȫ����ϵ�y(t��ng)���ڰl(f��)��܇���r��һ������Ч�ر��o܇��(n��i)�˄ՆT�İ�ȫ�������@Щ���Ӱ�ȫ��ʩ�����ĸ����Ͻ�Q��܇������аl(f��)����ײ��ɵĆ��}��������A��ײ܇�¹ʵİl(f��)���ĽǶ����ۣ��������܇���Ӱ�ȫ�Է����¹��t������܇��ȫ���I�����^���ͻ�ơ� ��܇�l(f��)����ײ����Ҫԭ����������܇����ǰ�����w������܇�����˻������ϵK��ľ��x�c��܇������܇�ٲ���Q��ɵģ������x���������ٶ���̫�ߡ����˷�ֹ��܇�cǰ�����w�l(f��)����ײ����܇��܇�پ�Ҫ����(j��)�cǰ�����w�ľ��x׃���Ɉ�(zh��)�ЙC���M�п��ƣ�ʹ��܇ʼ�K�ڰ�ȫ܇�������@�Ӿ͕���������܇���İ�ȫ�ԣ��p��܇���İl(f��)���� �l(f��)չ��܇��ײ���g���������܇���ܻ�ˮƽ����Ҫ���x����(j��)�y(t��ng)Ӌ��Σ�U���r�r������ܽo�{�T����犵��A̎��r�g���t�ɷքe�p��β�¹ʵ�30%��·�����P�¹ʵ�50%��ӭ��ײ܇�¹ʵ� 60%; 1��犵��A���r�g�ɷ�ֹ90%��β��ײ��60%��ӭ�^��ײ�� ��܇Ҫ��ײ�ͱ�횑{��һ�����b��y��ǰ���ϵK��ľ��x����Ѹ�ٷ����o��܇������Σ������r�£�ͨ�^���Ԅ��M��ij��A�O��������o���Ƅӵȣ������������{�Tƣ�ڡ�������e�`�Д�����ɵĽ�ͨ�¹ʡ�Ŀǰ����Ҷ�����ײ���g���P�I�c������܇�v�y�༼�g�� 1.2�о�����Ҫ��(n��i)���n�}������51�ij����y����܇��ײϵ�y(t��ng)����51��Ƭ�C��Сϵ�y(t��ng)�������y��ģ�K�����@ʾ�·�����·�Ͱ��I�·�ȽM�ɡ����ó����y��ģ�KHC-SR04�y�����x��������(sh��)��(j��)�M�з���̎�������o51��Ƭ�C����ͨ�^LED��(sh��)�a���@ʾ����������ͨ�^���I�{(di��o)�����x��ͬ�r�Դ���ֲ���5V��(w��n)��ֱ���Դ�� 1.3����Q���P�I���}1������ҪӲ���·�OӋ����������r�M��Q���P�I���}�ǣ����İl(f��)��ͽ��ܕr�g��Ӌ�㡣 2�������y�����ܛ�����̌��F(xi��n)�� 3�������y������^(q��)��Q�� 4�����I����ֵ���O�á�
2 �·����Փ�C2.1�������^2.1.1 ����y������y��һ����ÃɷN��ʽ��y�����x���}�_������λ�����}�_���y����^�̣��y���x�l(f��)����ļ��⽛(j��ng)���y�����w�ķ�����ֱ��y���x���գ��y���xͬ�rӛ䛼��������ĕr�g�����ٺ������r�g�ij˷e��һ�룬���ǜy���x�ͱ��y�����w֮�g�ľ��x����λ���y����^�̣��ßo��늲��ε��l�ʣ����������M�з����{(di��o)�Ʋ��y���{(di��o)�ƹ������y��һ�����a(ch��n)������λ���t���ٸ���(j��)�{(di��o)�ƹ�IJ��L���Q�����λ���t�������ľ��x�������g�ӷ����y�����⽛(j��ng)�^�����y������ĕr�g�� 2.1.2 �����y����܇��ײϵ�y(t��ng)�Ļ��������y���ԭ�������ó����ڿ՚��еĂ����ٶȞ���֪���y�����ڰl(f��)��������ϵK�ﷴ����ĕr�g������(j��)�l(f��)��ͽ��յĕr�g��Ӌ����l(f��)��늵��ϵK��Č��H���x����Ҋ�@�c���_�y��ԭ�����ơ������l(f��)������ijһ����l(f��)�䳬�����ڰl(f��)��r�̵�ͬ�r�_ʼӋ�r�������ڿ՚��Ђ�����;�������ϵK������������������������յ����䲨������ֹͣӋ�r�� �����σɷN�������������������÷��������·���^���Σ�ܛ���OӋҲ���^���Σ��ʲ����˷������� 2.2�·���w�����D2.1���·���w��D������51��Ƭ�C��Сϵ�y(t��ng)��HC-SR04�����y��ģ�K��LED��(sh��)�a���@ʾ�·�����Q�����·�Ͱ��I�·�� 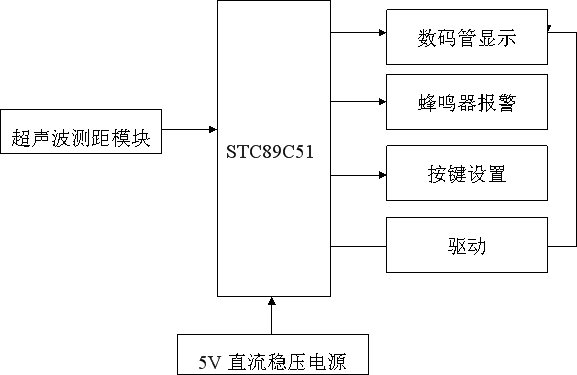  �D2.1 �·������D 3��Ƭ�C����3.1 STC89C51��Ҫ����STC89C51 ��STC��˾�Ƴ���һ������ɔ_�������ԏ����ھ��ɾ��̣����٣�����CMOS 8λ��Ƭ�C��Ƭ��(n��i)�� 4k bytes �Ŀɷ��Ͳ���Flashֻ�x����惦����256 bytes ���S�C��(sh��)��(j��)�惦����RAM������������STC��˾�ĸ��ܶȡ�����ʧ�Դ惦���g���a(ch��n)���c�˜�MCS��51ָ��ϵ�y(t��ng)��8052�a(ch��n)Ʒ���_���ݣ� Ƭ��(n��i)��ͨ��8λ����̎���� ��CPU����Flash�惦��Ԫ�� �������STC89C51��Ƭ�C�m�����S���^����s���Ƒ��È��ϡ� 3.2 STC89C51�ⲿ�Y�������������η��b�ЃɷN��ʽ���p��ֱ��ʽ40�_���b��DIP���ͷ���44�_���b ��PLCC����ֱ��ʽ40 �_���b��DIP�����ⲿ�����Y����D2�͈D3��ʾ�� 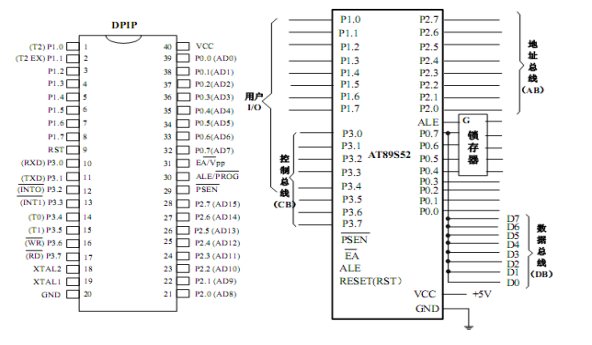
�D3.1 STC89C51���_���� �D3.2 �ⲿ���� STC89C51�� 4 �� 8 λI/O�ڵĹ����f�����£� ��1��P0�ڣ�P0 ����һ�� 8 λ©�O�_·���p�� I/O �ڡ�����ݔ���ڣ�ÿλ����8��TTL߉�ƽ����P0�˿ڌ���1���r�����_�������迹ݔ�롣 ���L���ⲿ����͔�(sh��)��(j��)�惦���r��P0��Ҳ������� 8 λ��ַ/��(sh��)��(j��)���á����@�Nģʽ�£�P0���Ѓ�(n��i)��������衣��flash ���̕r��P0��Ҳ�Á�����ָ���ֹ�(ji��)���ڳ���У�r��ݔ��ָ���ֹ�(ji��)������У�r����Ҫ�ⲿ������衣 ��2��P1�ڣ�P1����һ�����Ѓ�(n��i)����������8λ�p�� I/O�ڣ�p1ݔ�����_������4��TTL ߉�ƽ����P1�˿ڌ���1���r����(n��i)���������Ѷ˿����ߣ��˕r��������ݔ���ʹ�á�����ݔ��ʹ�Õr�����ⲿ���͵����_���ڃ�(n��i)������ԭ��ݔ�������IIL�������⣬P1.0 �� P1.2�քe�����r��/Ӌ��(sh��)�� 2 ���ⲿӋ��(sh��)ݔ�루P1.0/T2���Ͷ��r��/Ӌ��(sh��)�� 2 ���|�l(f��)ݔ�루P1.1/T2EX������ flash ���̺�У�r��P1�ڽ��յ�8λ��ַ�ֹ�(ji��)�� ��3��P2�ڣ�P2����һ�����Ѓ�(n��i)����������8λ�p��I/O�ڣ�P2ݔ�����_������ 4 �� TTL ߉�ƽ���� P2�˿ڌ���1���r����(n��i)���������Ѷ˿����ߣ��˕r��������ݔ���ʹ�á�����ݔ��ʹ�Õr�����ⲿ���͵����_���ڃ�(n��i)������ԭ��ݔ�������IIL�������L���ⲿ����惦������ 16 λ��ַ�xȡ�ⲿ��(sh��)��(j��)�惦���������(zh��)��MOVX @DPTR���r��P2���ͳ��߰�λ��ַ�����@�N�����У�P2��ʹ�ú��ă�(n��i)�������l(f��)��1����ʹ��8 λ��ַ���� MOVX @RI���L���ⲿ��(sh��)��(j��)�惦���r��P2 ��ݔ�� P2 �i�����ă�(n��i)�ݡ��� flash ���̺�У�r��P2 ��Ҳ���ո� 8 λ��ַ�ֹ�(ji��)��һЩ������̖�� ��4��P3�ڣ�P3����һ�����Ѓ�(n��i)����������8λ�p��I/O�ڣ�p2 ݔ�����_������4��TTL߉�ƽ����P3�˿ڌ���1���r����(n��i)���������Ѷ˿����ߣ��˕r��������ݔ���ʹ�á�����ݔ��ʹ�Õr�����ⲿ���͵����_���ڃ�(n��i)������ԭ��ݔ�������IIL������ flash ���̺�У�r��P3 ��Ҳ����һЩ������̖��P3 ��������AT89C52����ܣ��ڶ����ܣ�ʹ�ã�������ʾ�� P3.0 RXD(����ݔ���) P3.1 TXD(����ݔ����) P3.2 INTO(�ⲿ�Д�0 ݔ���) P3.3 INT1(�ⲿ�Д� 1 ݔ���) P3.4 TO(���r�� 0 �ⲿݔ��) P3.5 TI(���r�� 1 �ⲿݔ��) P3.6 WR(�ⲿ��(sh��)��(j��)�惦�����xͨ��̖) P3.7(�ⲿ��(sh��)��(j��)�惦���x�xͨ��̖) 3.3 STC89C51��(n��i)���M��STC89C51��Ƭ�C��һ�KоƬ�м����� CPU��RAM��ROM�����r��/Ӌ��(sh��)�������T���Ͷ�N���ܵ� I/O ���O��ĵȣ��ஔ��һ�_Ӌ��C����Ҫ�Ļ������ܲ����� STC89C51��Ƭ�C��(n��i)�����ľ��w�������£� һ��8 λ CPU�� һ��Ƭ��(n��i)��ʎ�����r��·�� 4KB Flash ����惦���� 128 B RAM ��(sh��)��(j��)�惦���� ����16 λ���r��/Ӌ��(sh��)���� �Ɍ�ַ 64KB ���ⲿ��(sh��)��(j��)�惦���� 64KB ���ⲿ����惦�����g�Ŀ����·�� 32 �l�ɾ��̵� I/O����4�M8 λ���� I/O�˿ڣ��� һ���ɾ���ȫ�p������ͨ�š� 8 ���Д�Դ���ɂ���(y��u)�ȼ�Ƕ���Д�Y���� STC89C52��Ƭ�C�Ŀ�D��D3.3��ʾ�������ܲ����Ƀ�(n��i)�������B����һ�� 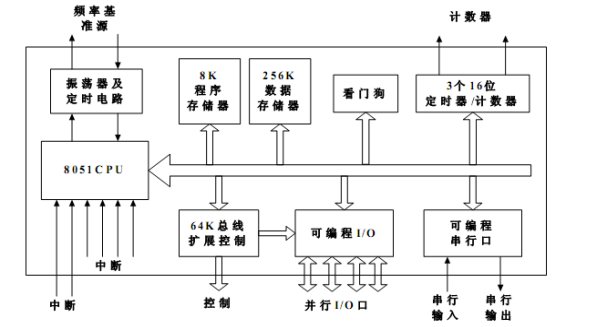
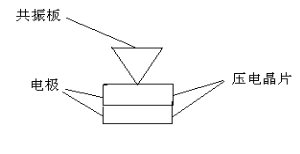
�D3.3 STC89C51��Ƭ�C��D 4 �����y��ģ�K4.1 ������������B������һ�N�l�ʱ��^�ߵ�����������ָ���ԏ����������ľ������������x�^�h�ȃ�(y��u)�c������(j��ng)�����ھ��x�Ĝy������y���x����λ�y���x�ȶ�����ͨ�^�����팍�F(xi��n)�������y����Ҫ�����ڵ�܇���_������ʩ�������Լ�һЩ���I(y��)�F(xi��n)��������Һλ������ܵ��L�ȵȈ��ϡ������y������ó����z�y�������^Ѹ�١����㡢Ӌ�㺆�Ρ������������r���ƣ������ڜy�����ȷ������_�����I(y��)���õ�Ҫ������ڜy��ϵ�y(t��ng)�������ϵõ��ˏV�����á� ����������һ�N��������ʽ�����D׃?y��u)������l�ʵij��ܻ��ǰѳ����D׃?y��u)�ͬ�l�ʵ�������ʽ���ܵ�������Ŀǰ���õij��������Ѓɴ��������c���w�����͡������Ҫ�У�1 ��늂�������2 ������s��������3 �o늂����������w�������а����К��w�cҺ�w�ɷN��͵��ڵѡ����ڹ����l���c����Ŀ�IJ�ͬ�����������ĽY����ʽ�Ƕ�N���ӵģ��������QҲ�в�ͬ�������ڳ��z�y���\�������T�϶��ѳ��������Q��̽�^�������I(y��)�в��õ����w�����͂������Q�顰�ڡ��ѡ��� ��늂��������ڳ�����������͵�һ�N��̽�^�ɉ�늾�Ƭ��Ш�K�����^�ȽM�ɣ��dz��z�y����õČ��F(xi��n)��ܺ�����D�Q��һ�N�����������dz����z�y�b�õ���Ҫ�M�ɲ��֡���늲��Ϸ֞龧�w�͉���մɃ�����ھ��w����ʯӢ�����䇵ȣ����ډ���մɵ��������U������^�ȡ���������е����ԣ����@�N��������늈�֮�У����ͮa(ch��n)��һ���đ�׃���෴�����@�N����ʩ���������t���ڮa(ch��n)���ˑ�׃�͕������(n��i)���a(ch��n)��һ�������늈������ԣ�ֻҪ���@�N���ϼ��Խ�׃늈������͕��a(ch��n)����׃�đ�׃���Ķ��a(ch��n)������ӡ���ˣ����@�N���Ͽ����Ƴɳ��������� ����������Ҫ�M�ɲ����lj�늾�Ƭ������늾�Ƭ�ܰl(f��)����}�_�����a(ch��n)����ӣ����ɰl(f��)���}�_�����扺�Ч���������������ھ�Ƭ�r����Ƭ��������������׃���D�Q�����������̖���������Ч����ǰ�����ڳ����İl(f��)�䣬�����鳬���Ľ��ա�����������һ������p����մɾ�Ƭ�Ƴɡ��@�N����������Ҫ�ĉ�늲����^�٣��r��������ҷdz��m���ښ��w��Һ�w���|(zh��)�С��ډ���մ��ϼ��д�С�ͷ���׃���Ľ���늉��r������(j��)���Ч�����͕�ʹ����մɾ�Ƭ�a(ch��n)���Cе׃�Σ��@�N�Cе׃�εĴ�С�ͷ�����һ��������(n��i)���c���늉��Ĵ�С�ͷ�������ȵġ�Ҳ�����f���ډ���մɾ�Ƭ�ϼ����l�ʞ� f0����늉������͕��a(ch��n)��ͬ�l�ʵęCе��ӣ��@�N�Cе����Ƅӿ՚��ý�飬����l(f��)������������ډ���մɾ�Ƭ���г��Cе�����ã��@����ʹ��a(ch��n)���Cе׃�Σ��@�N�Cе׃�����c���Cе��һ�µģ��Cе׃��ʹ����մɾ�Ƭ�a(ch��n)���l���c���Cе����ͬ�����̖�� �D4.1���ʽ�����������Y���D ���ʽ�����l(f��)�������H�������É�늾��w���C��������ģ������l(f��)������(n��i)���Y����D2.1��ʾ�����Ѓɂ���늾�Ƭ��һ������壬�����ăɘO����}�_��̖�����l�ʵ��ډ�늾�Ƭ�Ĺ�����ʎ�l�ʕr����늾�Ƭ�����l(f��)���������ӹ������ӣ���a(ch��n)����������֮�������늘O�gδ���늉������������յ������r�������ȉ�늾�Ƭ����ӣ����Cе���D�������̖���@�r���ͳɞ鳬���������� ����մɾ�Ƭ��һ���̶����C���l�ʣ��������l�� f0���l(f��)�䳬���r������������Ľ�׃늉����l��Ҫ�c���Ĺ����C���l��һ�¡��@�ӣ��������������^�ߵ��`���ȡ������É�늲��ϲ�׃�r����׃����մɾ�Ƭ�Ďγߴ磬�Ϳɷdz�����ĸ�׃������C���l�ʡ������@һ���Կ��Ƴɸ��N�l�ʵij��������� �����������ă�(n��i)���Y���ɉ���մɾ�Ƭ���F��ݗ�����ȡ����������������ٚ������پW(w��ng)���ɣ����У�����մɾ�Ƭ�ǂ������ĺ��ģ��F��ݗ������ʹ�l(f��)��ͽ��ճ����������У���ʹ��������һ����ָ��ǣ����ٚ��ɷ�ֹ�������������մɾ�Ƭ���F��ݗ�����ȵēp�ġ����پW(w��ng)Ҳ�����o���õģ�����Ӱ푰l(f��)���c���ճ����� 4.2 HC-SR04�����y��ģ�K���������cHC-SR04�����y��ģ�K���ṩ2cm-400cm�ķǽ��|ʽ���x�Мy���ܣ��y�ྫ�ȿɸ��_3mm��ģ�K���������l(f��)�������������c�����·�����������ԭ���� ��1������IO��TRIG�|�l(f��)�y�࣬�o����10us�ĸ��ƽ��̖�� ��2��ģ�K�ԄӰl(f��)��8��40khz�ķ������Ԅәz�y�Ƿ�����̖���أ� ��3������̖���أ�ͨ�^IO��ECH0ݔ��һ�����ƽ�����ƽ���m(x��)�ĕr�g���dz����İl(f��)�䵽���صĕr�g���yԇ���x=�����ƽ�r�g*��/340M/S��/2�� ��4����TRIG��0->1�r�������ư冢�ӣ������r10ms�rECH0��Ȼ�]�г��F(xi��n)150us��0��̖����ʾ�]���ϵK�� ��ģ�K���ܷ�(w��n)�����y�Ⱦ��x���_������Ҫ���c�� ��1�����ͣ�ֻ�ஔ�ڃɂ��l(f��)�䣬�����^����e�ѽ�(j��ng)�]����С�ˣ� ��2���oä�^(q��)��10mm��(n��i)���������`���^���ο��Ԯ���0̎������ ��3�������ٶȿ죬10ms�Ĝy�����ڣ������ׁGʧ����Ŀ�ˣ� ��4���l(f��)���^�������^�o�����ͱ��yĿ�˻�����ֱ���Pϵ�� ��5��ģ�K����LEDָʾ�������^��͜yԇ�� 4.3 HC-SR04�Ĺ��_���к�늚Ⅲ��(sh��)4.3.1 ���_���� HC-SR04�����μ����_������D4.2��ʾ�� ��1��VCC��5V�Դ�� ��2��GND��ؾ��� ��3��TRIG�|�l(f��)������̖ݔ�룻 ��4��ECH0�����̖ݔ���� 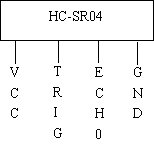
�D4.2���μ����_���ЈD 4.3.2 HC-SR04��늚Ⅲ��(sh��) 늚Ⅲ��(sh��)���4.1��ʾ�� ��4.1 늚Ⅲ��(sh��)��
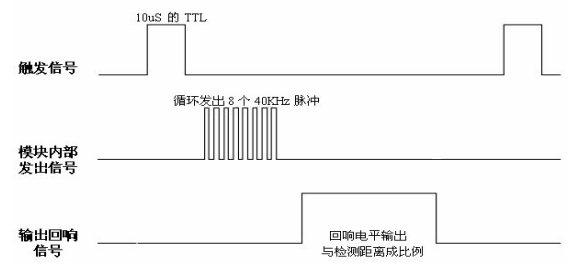
4.4�����r��D
�D4.3�����r��D �˕r��D����ֻ���ṩһ��10usһ���}�_�|�l(f��)��̖��ԓģ�K��(n��i)�����l(f��)��8��40kHz�����ƽ���z�y�ز���һ���z�y���һز���̖�tݔ�������̖�������̖���}�_�����c���y�ľ��x�����ȡ��ɴ�ͨ�^�l(f��)����̖���յ��Ļ����̖�r�g�g������Ӌ��õ����x����ʽ��uS/58=������uS/148=Ӣ�磻���ǣ����x=���ƽ�r�g*�٣�340M/S��/2�����h�y�����ڞ�60msһ�ϣ��Է�ֹ�l(f��)����̖�������̖��Ӱ푡� 5ϵ�y(t��ng)Ӳ���·�OӋ5.1��Ƭ�C��Сϵ�y(t��ng)5.1.1 STC89C51оƬ�����OӋ�҂������õ���STC89C51��Ƭ�C����һ�N��4k�ֹ�(ji��)�W�q�ɾ��̿ɲ���ֻ�x�惦���ĵ�늉���������COMOS8��̎������ԓ������40���_���ٶ��^�죬�r����ˣ���䛷��㣬ͨ�^���ڼ������d��߀���Ԍ��F(xi��n)�ھ����̣�����ATMEL���ܶȷ���ʧ�惦�����켼�g���죬�c���I(y��)�˜ʵ�MCS-51ָ���ݔ�����_����ݡ� 5.1.2 ��λ�· ��_���Cϵ�y(t��ng)���·��(w��n)���ɿ���������λ�·�DZز����ٵ�һ���֣���λ�·�Ļ��������ǣ�ϵ�y(t��ng)��늕r�ṩ��λ��̖��ֱ��ϵ�y(t��ng)�Դ��(w��n)�����N��λ��̖����ɿ���Ҋ���Դ��(w��n)����߀Ҫ��(j��ng)һ�������t�ų��N��λ���Է��Դ�_�P���Դ���^��-���^��������Ķ��Ӷ�Ӱ푏�λ������Ƭ�C�ď�λ���_���F(xi��n)2���C���������ϵĸ��ƽ�r����Ƭ�C�͈�(zh��)�Џ�λ���������RST���m(x��)����ƽ����Ƭ�C��̎��ѭ�h(hu��n)��λ��B(t��i)�����ԏ�λ���_����ݴ�һ�c�]����Pϵ��픶��Ǐ�λ�r�g�Lһ�c����������̫С�����ƽ���m(x��)�r�g̫�̣��t��Ƭ�C�o��������λ���Ͳ��ܹ��������ͨ��ȡ10UF��22UF���X늽���ݼ��ɡ� ��Ƭ�C�ď�λ�·�ڄ���ͨ늕r�����_ʼ����Ǜ]��늵ģ���݃�(n��i)�����ܵͣ�ͨ늺�5V���Դͨ�^���o늽�����M�г�늣���݃ɶ˵�늕���0V����������4V���ң��˕r�g�ܶ�һ��С��0.3�룩��������@�ӣ���λ�_�ɵ��λ�������λ�������˃�(n��i)���·�ď�λ������������λ�I�r����݃ɶ˷�늣�����ֻص�0V�ˣ��������M����һ�Ώ�λ�������·�D��D5.1�� 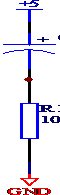
�D5.1 ��λ�· 5.1.3 �����·���dž�Ƭ�Cϵ�y(t��ng)���������ı��C�������ʎ��������ϵ�y(t��ng)�������ܹ�����������ʎ���\�в�Ҏ(gu��)�ɣ�ϵ�y(t��ng)��(zh��)�г���ĕr��͕����F(xi��n)�r�g�ϵ��`��@��ͨ���Е��w�F(xi��n)�ĺ����@���·���o��ͨ�š�������һ������̓ɂ���Ƭ��ݽM�ɵģ�����ʹ�Ƭ����Ǜ]����ؓ�ģ��ɂ���Ƭ������B���Ƕ�һ��Ҫ�ӵأ���D5.2��ʾ�� 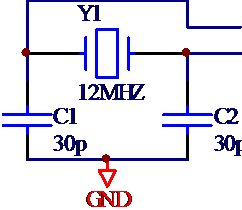
�D5.2 �����· һ���Ƭ�C�ľ������ڲ�(li��n)�C���B(t��i)��Ҳ����������C����ݵ�һ���֡����Ǹ���(j��)����S���ṩ�ľ���Ҫ��ؓ�d����xֵ�ģ��Q��Ԓ�f��������l�ʾ��������ṩ��ؓ�d����y�õģ�������ȵı��C�l��ֵ���`�Ҳ�ܱ��C��Ư���`� �C������:ͨ���ă�(n��i)�����xȡһ��ָ���ֵ���̕r�g��Ҏ(gu��)��CPU����,(Ҳ����Ӌ��Cͨ�^��(n��i)�����ⲿ�����M��һ����Ϣ��ݔ�Ķ����һ����ׂ���������Ҫ�ĕr�g),��һ����12���r����ڽM�ɡ����r�����=1��/�����l�ʣ���ˆ�Ƭ�C�ęC������=12��/�����l�� ���a�������ׂ����ڣ� ָ�����ڣ�Instruction Cycle����ȡ������(zh��)��һ�lָ��ĕr�g�� �������ڣ�BUS Cycle����Ҳ����һ���L�惦����I/O�˿ڲ������õĕr�g�� �r����ڣ�Clock Cycle�����ַQ��(ji��)�����ڣ���̎���������������λ��(�����l�ʵĵ���(sh��)��Ҳ�QT��B(t��i)) ָ�����ڡ��������ں͕r�����֮�g���Pϵ��һ��ָ�����������ɂ��������ڽM�ɣ���һ���������ڕr�g�ְ��������ɂ��r����ڡ� һ��̎������һ���C��������12���r��������M�ɡ����Ԇ�Ƭ�C��12M�����\���ٶȞ�1M�� ؓ�d���=[(Cd*Cg)/(Cd+Cg)]+Cic+��C[6 ]�����������ԡ���Ƭ�C��(n��i)���r��·��Ч������P�� �ɂ���ݵ�ȡֵ������ͬ�ģ������f����������̫����������C��IJ�ƽ�⣬�������ͣ����߸ɴ��������һ����(li��n)�f(xi��)������ã��@�ӿ��������}�_��ƽ��(w��n)�c�f(xi��)�{(di��o)�� 5.2 ���@ʾ�·�����·�@ʾ�·����LED��(sh��)�a���@ʾ�������^���O���ľ��x�r�����Q����LED�Ɍ��F(xi��n)���ܲ���ͨ�^���I���F(xi��n)�����x���{(di��o)���� 5.2.1 LED��(sh��)�a���@ʾ�·���·���@ʾģ�K��Ҫ��һ��4λһ�w��7��LED��(sh��)�a�ܘ��ɣ������@ʾ�y������늉�ֵ������һ����ꖘO�Ĕ�(sh��)�a�ܣ�ÿһλ��(sh��)�a�ܵ�a,b,c,d,e,f,g��dp�˶������B����һ�����ڽ��Ն�Ƭ�C��P1�ڮa(ch��n)�����@ʾ�δa��S1��S2��S3��S4���_�˞���λ�x�ˣ����ڽ��Ն�Ƭ�C��P2�ڮa(ch��n)����λ�x�a����ϵ�y(t��ng)���ÄӑB(t��i)���跽ʽ�����跽ʽ������ӿ��·�����Д�(sh��)�a�ܵ�8���Ȅ���a~g��dpͬ�����B��һ�𣬶�ÿһ����(sh��)�a�ܵĹ����OCOM���Ԫ�������I/O�����ơ�CUP���ֶ�ݔ�����ͳ����ʹa�r�����Д�(sh��)�a�ܽ��յ���ͬ�����ʹa�����������Ă���(sh��)�a�������tȡ�Q��COM�ˡ�COM���c��Ƭ�C��I/O�ӿ����B�ӣ��Ɇ�Ƭ�Cݔ��λλ�x�a��I/O�ӿڣ����ƺΕr��һλ��(sh��)�a�ܱ��c������݆���c����(sh��)�a�ܵ�λ�����^���У�ÿλ��(sh��)�a�ܵ��c���r�g�O��̕����������˵�ҕ�X�����F(xi��n)�o�˵�ӡ�����һ�M��(w��n)���@ʾ�Ĕ�(sh��)�a���ӑB(t��i)��ʽ�ă�(y��u)�c��ʮ�����@�ģ������ʡ���ڄӑB(t��i)�����^���У��κΕr��ֻ��һ����(sh��)�a����̎�ڹ�����B(t��i)�ġ����wԭ��D��D5.3 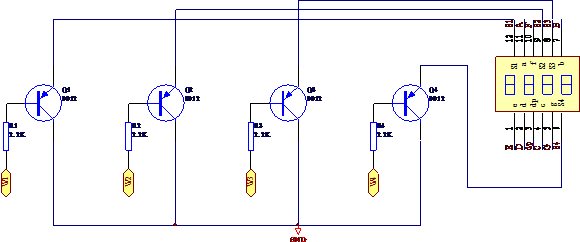 �D5.3 �@ʾ�· �D5.3 �@ʾ�·
5.2.2 ���Q����LED�����Q����һ�Nһ�w���Y�������Ӎ���������ֱ��늉���늣��V��������Ӌ��C����ӡ�C����ӡ�C�������������ߡ���܇����O�䡢�Ԓ�C�����r������Ӯa(ch��n)Ʒ�����l(f��)���������Q����Ҫ�֞鉺�ʽ���Q����늴�ʽ���Q���ɷN��͡����ʽ���Q����Ҫ�ɶ��C��ʎ������늷��QƬ���迹ƥ���������Q�䡢�⚤�ȽM�ɡ����C��ʎ���ɾ��w�ܻ��·���ɣ�����ͨ�Դ��1.5~15Vֱ������늉��������C��ʎ���������1.5~2.5kHz�����l��̖���迹ƥ�����ƄӉ�늷��QƬ�l(f��)��늴�ʽ���Q������ʎ����늴ž�Ȧ�����F�����ĤƬ���⚤�M�ɡ���ͨ�Դ����ʎ���a(ch��n)�������l��̖���ͨ�^늴ž�Ȧ����늴ž�Ȧ�a(ch��n)���ň������ĤƬ��늴ž�Ȧ�ʹ��F��������£������Ե���Ӱl(f��)�����OӋ����늴�ʽ���Q���������x�����A�Oֵ�r�����Q���͕��l(f��)������Ӳ�� 늴�ʽ���Q���İl(f��)ԭ�������ͨ�^늴ž�Ȧ����늴ž�Ȧ�a(ch��n)���ň��������Ĥ�l(f��)�ģ������Ҫһ�������������������Ƭ�CIO���_ݔ��������^С����Ƭ�Cݔ����TTL�ƽ�������Ӳ��˷��Q���������Ҫ����һ������Ŵ���·����ͨ�^һ��PNP�����O��8550���Ŵ��ӷ��Q����ԭ��DҊ�D5.3�� ��LED�·����һ���l(f��)����O�ܺ����M�ɣ����LEDһ�㹤����5ma��20ma�������x��1K����M����������D5.4��ʾ�� 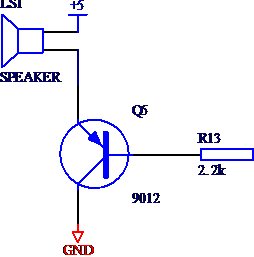
�D5.4 ���Q�����· 5.3 HC-RS04�����y��ԭ�������y���ǽ����ڳ��}�_�ز���Խ�r�g���팍�F(xi��n)�ģ��O�����}�_�ɂ������l(f��)������������(j��ng)�v�ĕr�g��t�������ڿ՚��еĂ����ٶȞ�c���t�Ă�������Ŀ�����w�ľ��xD������ʽ�����D=ct/2����ϵ�y(t��ng)��D��D5.5��ʾ�� 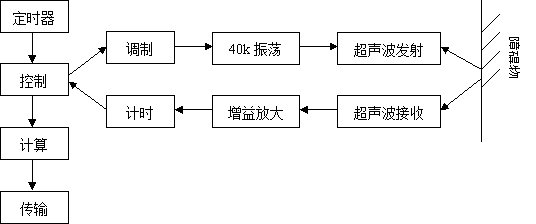  �D5.5 ϵ�y(t��ng)��D ����ԭ������(j��ng)�l(f��)�����l(f��)����L�s6mm���l�ʞ�40khz�ij�����̖������̖�����w������ɽ����^���գ������^���|(zh��)����һ�N���Ч���ēQ�����������յ���̖��a(ch��n)��mV������늉���̖�� 5.4 ���I�O���·��Ƭ�C�I�P�Ъ����I�P�;��ʽ�I�P�ɷN�������I�Pÿһ��I/O����ֻ��һ�����I�����I����һ�˽��Դ��ӵأ�һ��ӵأ����@�N�ӷ�������^������ϵ�y(t��ng)���ӷ�(w��n)���������ʽ�I�Pʽ�ӷ�������^���s������ռ�õ�I/O�١�����(j��)���OӋ����Ҫ�@���x���˪���ʽ�I�P�ӷ�������ʽ�I�P�Č��F(xi��n)���������Æ�Ƭ�CI/O���xȡ�ڵ��ƽ�ߵ́��Д��Ƿ����I���¡������_���I��һ�˽ӵأ���һ�˽�һ��I/O�ڣ������_ʼ�r����I/O�����ڸ��ƽ��ƽ�r�o�I���rI/O�ڱ��o���ƽ�������I���r����I/O���c�ض�·��ʹI/O�ڞ���ƽ�����Iጷź�Ƭ�C��(n��i)�����������ʹI/O����Ȼ���ָ��ƽ���҂���Ҫ���ľ����ڳ����в錤��I/O�ڵ��ƽ��B(t��i)�Ϳ����˽��҂��Ƿ��а��I�����ˡ����Æ�Ƭ�C���I�P̎���ĕr���漰����һ����Ҫ���^�̣��Ǿ����I�P��ȥ���ӡ��@���f�Ķ����ǙCе�Ķ��ӣ��Ǯ��I�P��δ�������µ��R��^(q��)�a(ch��n)�����ƽ����(w��n)�������F(xi��n)�������҂��ڰ��I�rͨ�^ע����Ա���ġ��@�N����һ��10~200����֮�g���@�N����(w��n)���ƽ�Ķ��ӕr�g�����ˁ��f̫���ˣ������ڕr�����Ć�Ƭ�C���Ԅt�����L�ġ�Ӳ��ȥ���Ӿ����ò����·�����Ӳ��ּ�֮̎����ܛ��ȥ���Ӳ���ȥ�����ӣ����DZܶ��Ӳ��ֵĕr�g�����I�P��(w��n)�����ٌ���̎���������@���x����ܛ��ȥ���ӣ����F(xi��n)�����Ȳ錤���I���е��ƽ���F(xi��n)�r�����ӕr10~200�����Ա��_���ӣ���(j��ng)��ֵ��20���룩���ӕr�Y�������xһ��I/O�ڵ�ֵ���@һ�ε�ֵ�����1��ʾ���ƽ�ĕr�g����10~200���룬ҕ��ɔ_��̖�����x����ֵ��0�r�t��ʾ�а��I���£��{(di��o)��������̎������Ӳ���·��D5.6��ʾ�� 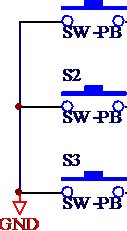
�D5.6 ���I�·�D
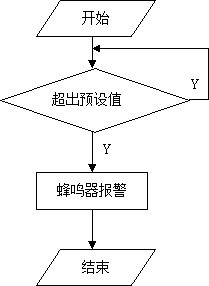
6ϵ�y(t��ng)������OӋ ϵ�y(t��ng)������Ҫ�����������@ʾ��(sh��)��(j��)�ӳ����ӳ���Ͱ��I�ӳ���ȡ� 6.1������ ���������Ҫ������ؓ؟���x���@ʾ���x����̎��HC-RS04�Ĝy�����xֵ�����I������Ч���x���ƣ����y����ֵ���^�A�Oֵ�r�����Q���l(f��)�� ���������̈D��D6.1��ʾ�� 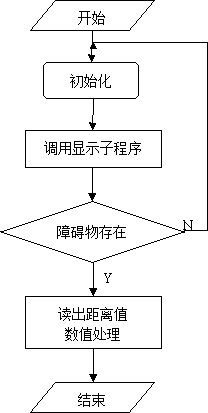
�D6.1�����̈D 6.2�@ʾ��(sh��)��(j��)�ӳ��� �@ʾ��(sh��)��(j��)�ӳ������Ҫ���ܾ��ǰѳ���ģ�K�y����ĽY����(j��ng)��Ƭ�C̎���ꮅ�ľ��x�@ʾ�ڔ�(sh��)�a���ϡ� �@ʾ��(sh��)��(j��)�ӳ������̈D��D6.2��ʾ�� �D6.2�@ʾ��(sh��)��(j��)�����̈D 6.3���ӳ��� ���ӳ������Ҫ�������ھ��xֵ���^�A��ֵ�r���܉�ʹ���Q���l(f��)�Ķ��_����Ŀ�ġ� ���ӳ������̈D��D6.3��ʾ�� �D6.3�������̈D 6.4���I�ӳ��� ���I�ӳ������Ҫ��������Ч���x���{(di��o)�������I�{(di��o)�����ޣ��ٴι����I�{(di��o)�����ޣ��ٴΰ������˳��� ���I�ӳ������̈D��D6.4��ʾ�� 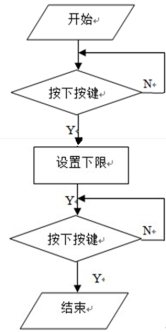
�D6.4���I������
�Y Փ��Փ�����mȻ����ȫ���xģ���M���˸��M���������Mһ�����M�ͼ���������һ���Ŀ�����Փ���㷨��ʹģ�����пƌW�ԡ��ɿ��ԺͿɲ����ԡ���ϵ�y(t��ng)�F(xi��n)�A��ֻ�Ǿ�Σ�U��r���F(xi��n)�����{�T�����������{�T�ķ������в��ע���������С�ƣ���{�����صĴ��ڣ��Еrδ���ܼ��r��ȡ�p�١��x܇�ȴ�ʩ�����ϵ�y(t��ng)��һ����Ŀ���nj��F(xi��n)�Ԅӄx܇�Ĺ��ܣ�ʹ�{�T�İ�ȫ���б��ϡ� ��1)��ϵ�y(t��ng)ֻ������Փ��ӑՓ����܇����ײ�Ć��}�����ڌ���O��͕r�g���}߀�]���M�Ќ� (2)��ϵ�y(t��ng)߀��ԓ�Mһ���ڏ��s���(�ꡢѩ�����F)������ѩ·�����Mһ���yԇ����Cϵ�y(t��ng)���OӋ���ܡ� (3)�ڱ�ϵ�y(t��ng)���A�ϣ��Mһ���_�l(f��)܇�v���m��Ѳ������ϵ�y(t��ng)��ʹ܇�v�����m�Ժ����Ӱ�ȫ�Եõ����. �����īI[1] ���h�ţ���Ƭ�Cԭ����ϵ�y(t��ng)�OӋ[M] .����:���A��W�����磬2012. [2] ������. 51��Ƭ�C�_�l(f��)���T�c���͌���[M].����:�����]늳����磬2007. [3] �ѩ��. ��Ƭ�Cԭ�����ӿڼ��g[M].����:���W���I(y��)������, 2005. [4] Ѧ���x��������.MCS-51ϵ�І�Ƭ��Ӌ��C���䑪��.������������ͨ��W�����磬2008. [5] �Ʒf���̾ջ����Ηl��.��Ƭ�Cԭ���c���ü�C51�����OӋ[M].������������W�����磬2011 [6]��£���ɭ���������x.���ٹ�·�¹ʵ��T���A������[J].��·��ͨ�Ƽ�.2010(6). [7]������.�҇����ٹ�·��ͨ�¹ʵĻ������c�c�A������[J].��·��ͨ�Ƽ��W��.2012(4). [8]ꐕԖ|.��������܇���C�ɿ���ԇ��о�[J].��܇�c���.2009(����). [9]������.�l(f��)չ����˾.P89V51RD2�����փ�.2013.3. .
�� ���A��(��Ƭ�Cԭ��D) 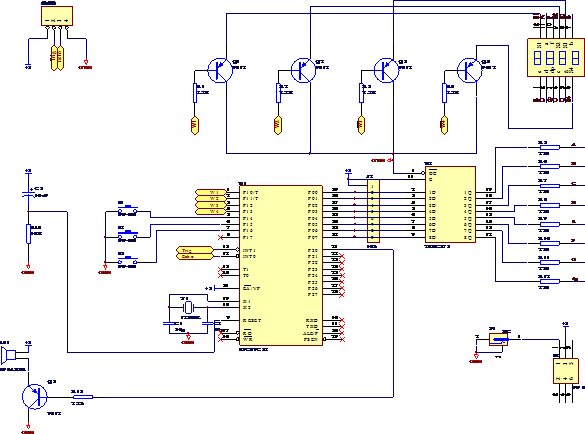
�� �x
���ȣ���Ҫ���x�ҵ�ָ���ώ��ڮ��I(y��)�OӋ�Ќ��ҽo���Ϥ��ָ���͇���Ҫ��ͬ�rҲ���x��У��һЩ�ώ��ڮ��I(y��)�OӋ���g���o���ҵÎ��������Ү��I(y��)Փ�Č������g����λ�ώ��o���ṩ�˷N�N���I(y��)֪�R�ϵ�ָ�����ճ������ϵ��P�ѣ��]�������@�ӵĎ������P�ѣ��Ҳ����@ô�������ɮ��I(y��)�OӋ����˙C������������ʾ���Եĸм���ͬ�r߀Ҫ���xϵ������ڮ��I(y��)�OӋ���g�ṩ�o�҂���(y��u)Խ�Č��l����
��������Ҫ���x����һ�������I(y��)�OӋ��ͬ�W���ڮ��I(y��)�OӋ�Ķ̶ׂ̎�����ゃ�o������ܶ����F����Ҋ���o���Ҳ��َ���߀�й����ϵ�֧�֣��ڴ�Ҳ���\���x�x�ゃ��ͬ�r����߀Ҫ���x�ҵČ���ͬ�W����߅�����ѣ��������@��һ���F�Y�ѐۣ�����M�ĭh(hu��n)���У��ں�������������͆��l(f��)�У������ҽ����СС�ի@��
�����Ҫ����ظ��x�ҵļ��ˣ����������������ذ����B(y��ng)�����ˣ�������͌W���Ͻo���ҟo�M�Đۡ������֧�֣���ʹ�ҕr�̳�M���ĺ��⣬�˷����L·�ϵķN�N���y���������ɴ�W�W�I(y��)��
߀���S�S���o���ҌW�I(y��)�ϹĄ�͎��������ѣ��ڴ˟o��һһ���e���ڴ�Ҳһ����ʾ���ĵظ��x��
��Ƭ�CԴ��������:
- <font style="font-size: 12pt">#include <reg52.H>//���������ļ�
- #include <intrins.h>
-
- //���I��
- sbit RX = P3^2;
- sbit TX = P3^3;
- sbit S1 = P1^4;
- sbit S2 = P1^5;
- sbit S3 = P1^6;
- //���Q��
- sbit Feng= P2^0;
-
- //׃����
- unsigned int time=0;
- unsigned int timer=0;
- unsigned char posit=0;
- unsigned long S=0;
- unsigned long BJS=50;//���x80CM
- //ģʽ 0����ģʽ 1�{(di��o)��
- char Mode=0;
- bit flag=0;
-
- unsigned char const discode[] ={0x3f,0x06,0x5b,0x4f,0x66,0x6d,0x7d,0x07,0x7f,0x6f,0x40,0xff/*-*/};
- unsigned char const positon[4]={0xfd,0xfb,0xf7,0xfe};
- unsigned char disbuff_BJ[4] ={0,0,0,0};//����Ϣ
-
- //�ӕr100ms
- void delay(void) //�`�� 0us
- {
- unsigned char a,b,c;
- for(c=10;c>0;c--)
- for(b=38;b>0;b--)
- for(a=130;a>0;a--);
- }
-
- //���I����
- void Key_()
- {
- //+
- if(S1==0)
- {
- delay();
- while(S1==0)
- {
- P1=P1|0x0f;
- }
- BJS++;
- if(BJS==151)
- {
- BJS=0;
- }
- }
- //-
- else if(S2==0)
- {
- while(S2==0)
- {
- P1=P1|0x0f;
- }
- BJS--;
- if(BJS==0)
- {
- BJS=150;
- }
- }
- //����
- else if(S3==0)
- {
- delay();
- while(S3==0)
- {
- P1=P1|0x0f;
- }
- Mode++;
- if(Mode==2)
- {
- Mode=0;
- }
- }
- }
- /**********************************************************************************************************/
- //���蔵(sh��)�a��
- void Display(void)
- {
- //�����@ʾ
- if(Mode==0)
- {
- if(posit==0)//��(sh��)�a�ܵ��ט�־
- {
- P0=(discode[disbuff[posit]])|0x80;
- }
- else
- {
- P0=discode[disbuff[posit]];
- }
- if(++posit>=3)
- posit=0;
- }
- //���@ʾ
- else
- {
- if(posit==0)//��(sh��)�a�ܵ��ט�־
- {
- P0=(discode[disbuff_BJ[posit]])|0x80;
- }
- else if(posit==3)
- {
- P0=0x76;
- }
- else
- {
- P0=discode[disbuff_BJ[posit]];
- }
-
- P1=positon[posit];
- }
- }
- /**********************************************************************************************************/
- //Ӌ��
- void Conut(void)
- {
- time=TH0*256+TL0;
- TH0=0;
- TL0=0;
- S=(time*1.7)/100; //�������CM
-
- if(Mode==0)
- {
- if((S>=700)||flag==1) //�����y�������@ʾ��-��
- {
- Feng=0;
- flag=0;
- disbuff[0]=10; //��-��
- disbuff[1]=10; //��-��
- disbuff[2]=10; //��-��
- }
- else
- {
- //���x���ڈ�
- if(S<=BJS)
- {
- Feng=0;
- }
- else
- {
- Feng=1;
- }
- disbuff[0]=S%1000/100;
- disbuff[1]=S%1000%100/10;
- disbuff[2]=S%1000%10 %10;
- }
- }
- else
- {
- Feng=1;
- disbuff_BJ[0]=BJS%1000/100;
- disbuff_BJ[1]=BJS%1000%100/10;
- disbuff_BJ[2]=BJS%1000%10 %10;
- }
- }
- /**********************************************************************************************************/
- //���r��0
- void zd0() interrupt 1 //T0�Д��Á�Ӌ��(sh��)�����,���^�y���
- {
- flag=1; //�Д������־
- }
- /**********************************************************************************************************/
- //���r��1
- void zd3() interrupt 3 //T1�Д��Á���蔵(sh��)�a�ܺ�Ӌ800MS����ģ�K
- {
- TH1=0xf8;
- TL1=0x30;
- Key_();
- Display();
- timer++;
- if(timer>=400)
- {
- timer=0;
- TX=1; //800MS ����һ��ģ�K
- _nop_();
- _nop_();
- _nop_();
- _nop_();
- _nop_();
- _nop_();
- _nop_();
- _nop_();
- _nop_();
- _nop_();
- _nop_();
- _nop_();
- _nop_();
- _nop_();
- _nop_();
- _nop_();
- _nop_();
- _nop_();
- _nop_();
- TX=0;
- }
- }
- /**********************************************************************************************************/
- //������(sh��)
- void main(void)
- {
- TMOD=0x11; //�OT0�鷽ʽ1��GATE=1��
- TH0=0;
- TL0=0;
- TH1=0xf8; //2MS���r
- TL1=0x30;
- ET0=1; //���ST0��
- TR1=1; //�_�����r��
- EA=1; //�_������
- while(1)
- {
- while(!RX); //��RX����r�ȴ�
- TR0=1; //�_��Ӌ��(sh��)
- while(RX); //��RX��1Ӌ��(sh��)���ȴ�
- TR0=0; //�P�]Ӌ��(sh��)
- Conut(); //Ӌ��
- }
- }</font>
������Word��ʽ�ęn51�����d��ַ��
 57-�����y����܇��ײϵ�y(t��ng).doc
(458.5 KB, ���d��(sh��): 127)
57-�����y����܇��ײϵ�y(t��ng).doc
(458.5 KB, ���d��(sh��): 127)
2018-7-11 12:08 �ς�
�c���ļ������d����
| 

 ����TQQ:125739409;���g����QQȺ281945664
����TQQ:125739409;���g����QQȺ281945664