大學生電子設計競賽
循跡小車(I題)
1 系統方案
1.1 整體系統方案的選擇
方案一,基于K66嵌入式系統,采用恩智浦智能車車模,配合大功率電機與BTN7971B驅動芯片進行后輪驅動,前輪通過舵機控制方向,通過在車后安裝512線mini編碼器進行PID精確調速,通過OV7725數字二值化攝像頭讀取賽道黑線信息并將數據發送給單片機處理,進而控制電機與舵機的運行。
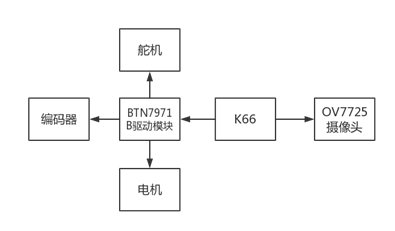
圖1 方案一設計框圖
方案二,基于52單片機系統,采用普通四輪車模,配合L298N驅動芯片進行后輪驅動,前輪安裝舵機進行轉向,使用HC-SR04超聲波模塊進行測距以實現避障,通過在車前與車后安裝TCRT5000紅外傳感器讀取賽道黑線信息并將數據發送給單片機處理,進而控制電機的轉速來控制小車運行速度與方向。
方案三,改變方案二的驅動模式,由后輪驅動改為四輪驅動,取消舵機。
經測試,恩智浦智能車車模舵機轉向角度不夠,不足以通過S彎,且攝像頭作傳感器只能進行前進,后退時仍需要紅外循跡模塊,將花費過多不必要的時間。而方案二雖然實現了要求的全部功能,但是舵機在轉彎時速度較慢,與其他組相比不具有優勢,因此選擇了速度較快的方案三。
1.2 整體系統方案的論證
用單片機作為循跡小車的處理器,配合使用一系列硬件部分,實現小車的各功能。該方案硬件可分為如下部分:
- 輸入設備(紅外循跡模塊,超聲波模塊)
- 電機及其驅動部分
其中,循跡模塊進行黑線的讀取,當反射的光照射到接收管時會在接收管上產生相應的電位變化,超聲波模塊通過高低電平讀定時器的值進行測距,以上信號被單片機識別后。配合電機驅動及直流電機,即可實現循跡與避障功能,。
2 系統理論分析

2.1 單片機部分
 STC89C52RC是STC公司生產的一種低功耗、高性能CMOS8位微控制器,具有 8K字節系統可編程Flash存儲器。STC89C52使用經典的MCS-51內核,但做了很多的改進使得芯片具有傳統51單片機不具備的功能。在單芯片上,擁有靈巧的8位CPU 和系統可編程Flash,在循跡小車的實現中,起到至關重要的作用。
STC89C52RC是STC公司生產的一種低功耗、高性能CMOS8位微控制器,具有 8K字節系統可編程Flash存儲器。STC89C52使用經典的MCS-51內核,但做了很多的改進使得芯片具有傳統51單片機不具備的功能。在單芯片上,擁有靈巧的8位CPU 和系統可編程Flash,在循跡小車的實現中,起到至關重要的作用。
2.2 硬件部分
2.1.1 HC-SR4超聲波模塊
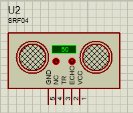
 超聲波模塊主要有TRIG控制端與ECHO接收端兩個端口,控制口發一個10us以上的高電平,就可以在接收口等待高電平輸出。一有輸出就可以開定時器計時,當此口變為低電平時就可以讀定時器的值,此時就為此次測距的時間,方可算出距離,如此不斷的測周期,就可以算出移動測量的值。
超聲波模塊主要有TRIG控制端與ECHO接收端兩個端口,控制口發一個10us以上的高電平,就可以在接收口等待高電平輸出。一有輸出就可以開定時器計時,當此口變為低電平時就可以讀定時器的值,此時就為此次測距的時間,方可算出距離,如此不斷的測周期,就可以算出移動測量的值。
2.1.2 TCRT5000紅外發射傳感器

 紅外發射管發射光線到路面,紅外光遇到白底則被反射,接收管接收到反射光,經施密特觸發器整形后輸出低電平;當紅外光遇到黑線時則被吸收,接收管沒有接收到反射光,經施密特觸發器整形后輸出高電平,同時將信號輸入單片機進行處理。
紅外發射管發射光線到路面,紅外光遇到白底則被反射,接收管接收到反射光,經施密特觸發器整形后輸出低電平;當紅外光遇到黑線時則被吸收,接收管沒有接收到反射光,經施密特觸發器整形后輸出高電平,同時將信號輸入單片機進行處理。
3 電路與程序設計
3.1 電路的設計
3.1.1系統總體框圖
圖5 系統總體框圖
3.1.2 紅外循跡傳感器子系統框圖與電路原理圖
3.2程序的設計
3.2.1程序功能描述與設計思路
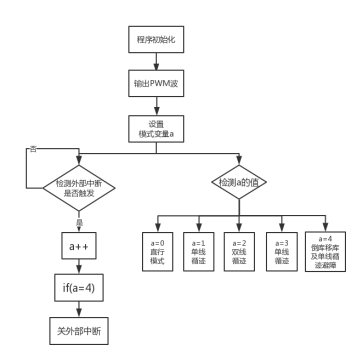
小車通過尋跡模塊產生外部中斷,來識別黑色長標志線。每個標志線之后對應不同的狀態,依次為直行模式,單線模式,雙線模式,單線模式和倒庫模式。直行模式就是兩邊電機相同轉向直行;單線模式是用前部里側的兩個尋跡模塊檢測黑線控制兩側電機轉向;雙線模式是用前面的外部的外側兩個尋跡模塊來檢測黑線,控制電機轉向;倒庫模式先后左轉后尋黑線后退,到達庫底停車10s,再由外部中斷移庫,移庫后用里面兩個尋跡和右邊尋跡模塊檢測黑虛線到達超聲波前,實現避障到達終點。
3.2.2 程序流程圖
圖8 程序流程圖
4 測試方案與測試結果
將小車放置于比賽場地上進行測試。
4.2 測試條件與儀器
中心提供的場地。
4.3 測試結果及分析
4.3.1 測試結果(數據)
小車可以沿鋪設的黑線場地進行“S”型轉彎,虛線跑道循跡行駛,并可進行快速倒車入庫與移庫,并避開最后的障礙物。
4.3.2 測試分析與結論
小車在絕大多數情況下均很好的實現了題目的全部要求,只在極少數情況下會駛出虛線跑道,說明我們的程序在虛線的識別上仍然存在一些小問題。
5 心得體會
這次比賽是個人努力與團隊協作的共同產物,相互不能割舍。通過這次比賽,加強了我們動手、思考和解決問題的能力。在整個設計過程中,我們通過這個方案包括設計了一套電路原理和Proteus仿真應用及和芯片上的選擇。在設計過程中,經常會遇到這樣那樣的情況,就是心里想這樣的接法可以行得通,但實際接上電路,總是實現不了,因此耗費在這上面的時間用去很多。我覺得設計同時也是對課本知識的靈活運用,因為課本上的知識點繁雜,平時的基礎學習并不能很好的掌握其中的理解各個元件的功能,而且考試內容有限。因此在這次課程設計過程中,我們掌握了理論與實踐相互結合,印象更加深刻。在平時看課本時,有時問題老是弄不懂,理解不上去,缺乏動手能力,在做設計過程中,把握其中的關鍵知識點,充分研究,對于知識的領悟更加深刻。在動手處理單片機時,更急發現到實踐的重要性,哪怕一個小小細微的功能元件的錯誤都會失敗,細心與耐心、恒心才能做的成功,而且在布局和構造格式中,線的布局上既要美觀、實用和簡單,其中兼顧到方方面面去考慮是很需要的,否則會影響整個設計的實際性的應用。
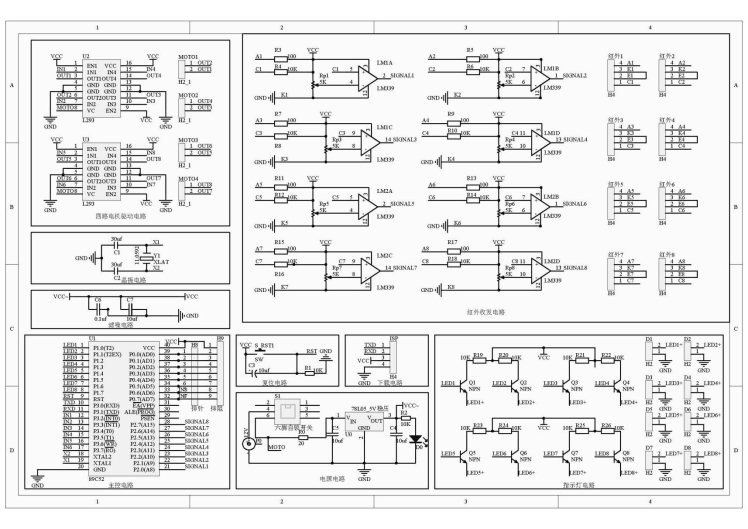
附錄1:電路原理圖

 ID:475774
發表于 2019-3-22 17:21
ID:475774
發表于 2019-3-22 17:21


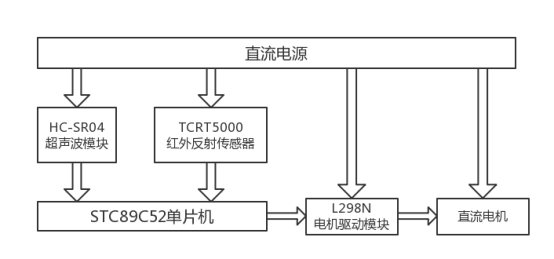
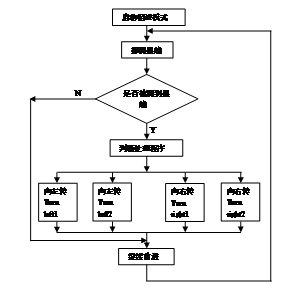
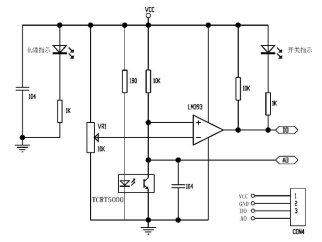 圖6紅外循跡傳感器子系統框圖
圖6紅外循跡傳感器子系統框圖