��ʮ��á��Lͨ������W(xu��)������O(sh��)Ӌ(j��)��ِ
ѭ�EС܇��I�}��
ժ Ҫ
�S���F(xi��n)�����IJ���l(f��)չ������ˮƽ��u�M(j��n)����ijЩ��������(d��o)�C(j��)�����ѽ�(j��ng)���F(xi��n)�ڟo���{�C(j��)��(d��ng)܇���}�죬�o�˿��f���S������(w��)�C(j��)���˵ȷ��棬����ѭ�EС܇��������һ��(g��)��Ҫ�đ�(y��ng)�÷�����Փ��������ѭ�EС܇�Ŀ����^�̣����O(sh��)Ӌ(j��)����STC89C516RD+��Ƭ�C(j��)��������С܇�Ŀ��ƺ��ģ��\(y��n)�üt�⌦(du��)�܂������z�y��·��r���R(sh��)�e��ɫ·������ĺ�ɫ��(bi��o)�R(sh��)�����ɼ���̖(h��o)������̖(h��o)�D(zhu��n)�Q���ܱ���Ƭ�C(j��)�R(sh��)�e�Ĕ�(sh��)����̖(h��o)����늙C(j��)�(q��)��(d��ng)�У�����L298N늙C(j��)�(q��)��(d��ng)ģ�K����ֱ��늙C(j��)��ͨ�^����(y��ng)��������p��ѭ�E���Ԅ�(d��ng)��܇���Ԅ�(d��ng)���ϣ����wϵ�y(t��ng)�·�O(sh��)Ӌ(j��)���Σ��ɿ����ܸߡ�
Ŀ �
ժ Ҫ
Ŀ � III
1 ϵ�y(t��ng)����
1.1 ����ѭ�EС܇����оƬ��Փ�C�c�x��
2 ϵ�y(t��ng)��Փ�����cӋ(j��)��
2.1 ϵ�y(t��ng)���w�ķ���
2.1.1 ����Ԫ���ķ��� 1
2.1.2 ϵ�y(t��ng)ģ�K�c�Ӿ����� 2
2.1.3 С܇�Դģ�K���� 2
2.1.4 늙C(j��)�(q��)��(d��ng)ģ�K���� 2
2.1.5 �t��ѭ�Eģ�K���� 3
3 �·�c�����O(sh��)Ӌ(j��) 3
3.1 �·���O(sh��)Ӌ(j��) 4
3.1.1 ϵ�y(t��ng)���w��D 4
3.1.2 �(q��)��(d��ng)ϵ�y(t��ng)��D�c�·ԭ��D 4
3.2 ������O(sh��)Ӌ(j��) 5
3.2.1 �����������c�O(sh��)Ӌ(j��)˼· 5
3.2.2 �������̈D 5
4 �yԇ�����c�yԇ�Y(ji��)�� 6
4.1 �yԇ���� 6
4.2 �yԇ�l���c�x�� 6
4.3 �yԇ�Y(ji��)�������� 6
4.3.1 �yԇ�Y(ji��)��(��(sh��)��(j��)) 6
4.3.2 �yԇ�����c�Y(ji��)Փ 7
5 �ĵ��w��(hu��) 7
���1���·ԭ��D 8
���2��Դ���� 10
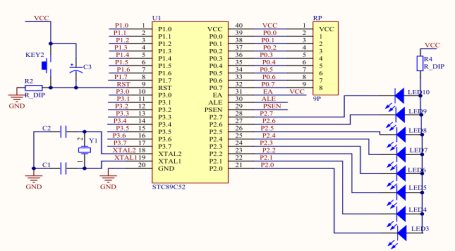
ѭ�EС܇��I�}�� 1 ϵ�y(t��ng)���� 1.1����С܇����оƬ��Փ�C�c�x�� ����1������Atmel��˾��AT89C516RD+��Ƭ�C(j��)��������С܇������оƬ�� AT89C516RD+��һ�N���ġ�������CMOS8λ������������늉���5V��32��(g��)I/O�ڣ����� 8K ��ϵ�y(t��ng)�ɾ���Flash �惦(ch��)����ԓоƬ�r(ji��)����ˣ���(y��ng)�ÏV�����������Σ�Ӳ���cܛ���O(sh��)Ӌ(j��)����(du��)���Ρ���W(xu��)���V�����چ�Ƭ�C(j��)�W(xu��)��(x��)�c��(chu��ng)�����YԴ�����������С܇���O(sh��)Ӌ(j��)����ˣ����O(sh��)Ӌ(j��)�x���˴�оƬ�� ����2�����Æ�Ƭ�C(j��)MSP430F1611��������С܇������оƬ��MSP430F1611��һ����Ć�Ƭ�C(j��)������늉�������1.8V-3.6V,48 λI/O �ھ���16-Bit RISC �ܘ�(g��u)��������(y��ng)Ӳ����(f��)�s��ܛ����������(du��)�y�ȴ��҃r(ji��)���F����������С܇�YԴ�^ʣ��������M(f��i)�������҂��ŗ��˴˷����� ����3������AT89C51��Ƭ�C(j��)��4k�ֹ�(ji��)Flash �W�ٴ惦(ch��)����128�ֹ�(ji��)��(n��i)��RAM��32 ��(g��)I/O �ھ����ɂ�(g��)16λ���r(sh��)/Ӌ(j��)��(sh��)����һ��(g��)5�����ɼ�(j��)�Д�Y(ji��)��(g��u)��һ��(g��)ȫ�p������ͨ�ſڣ�Ƭ��(n��i)��ʎ�����r(sh��)��·���F(xi��n)�ѱ�C52��uȡ�����ʷŗ��� ���O(sh��)Ӌ(j��)�������÷���һ�е����ڲ�����AT89C516RD+��Ƭ�C(j��)�������̖(h��o)̎��������늙C(j��)�(q��)��(d��ng)�Լ��t�⌤�E���ܡ� 2 ϵ�y(t��ng)��Փ�����cӋ(j��)�� 2.1ϵ�y(t��ng)���w�ķ��� 2.1.1 ����Ԫ���ķ��� ��1������AT89C516RD+����оƬ�� - ����L298N����늙C(j��)�(q��)��(d��ng)ģ�K����оƬ��
- ���üt�⌦(du��)�������ھ��z�yģ�K��
- ���������������������ģ�K��
2.1.2 ϵ�y(t��ng)ģ�K�c�Ӿ����� ��1����(du��)��Ƭ�C(j��)�ij����c��� �������c�Z�Ծ��̣�ͨ�^keil uVision4ܛ����(du��)�����M(j��n)���{(di��o)ԇ�Լ���(du��)�����\(y��n)�еij������Ɇ�Ƭ�C(j��)�����\(y��n)�е�hex�ļ�������ğ�䛲���stc-isp-15-v6.85���ܛ������USB�D(zhu��n)TTLС��o��Ƭ�C(j��)��䛳���С���RX�ӆ�Ƭ�C(j��)��TX��p3.1��,TX�ӆ�Ƭ�C(j��)��RX��p3.0����GND�ӆ�Ƭ�C(j��)��GND��VCC�ӆ�Ƭ�C(j��)��VCC������Ҫע��������ß��ܛ���o��Ƭ�C(j��)��䛳���r(sh��)Ҫ���䆢��(d��ng)�������c(di��n)�������d/���̡����o���ٌ�USBС���VCC�B�ӆ�Ƭ�C(j��)��VCC�� 2.1.3 С܇���Դģ�K���� 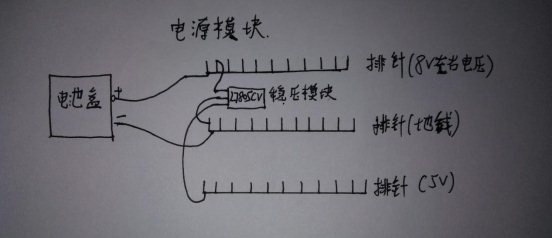 늳�ģ�K����4��(ji��)��늳،�(du��)С܇��늡�늙C(j��)���\(y��n)����Ҫ8V���ҵ�늉�������Ƭ�C(j��)���������Լ��t��ģ�K����Ҫ��(w��n)����5v��߉늉�����˲���L7805CV��(w��n)��оƬݔ����(w��n)����5v늉��� 늳�ģ�K����4��(ji��)��늳،�(du��)С܇��늡�늙C(j��)���\(y��n)����Ҫ8V���ҵ�늉�������Ƭ�C(j��)���������Լ��t��ģ�K����Ҫ��(w��n)����5v��߉늉�����˲���L7805CV��(w��n)��оƬݔ����(w��n)����5v늉���
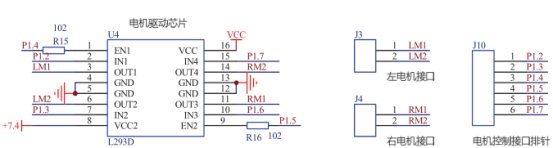
�D1 �Դģ�K 2.1.4늙C(j��)�(q��)��(d��ng)ģ�K���� 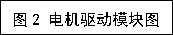 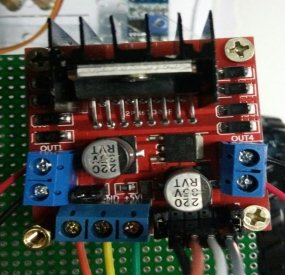 늙C(j��)�(q��)��(d��ng)����L298N����оƬ�c��Ƭ�C(j��)��늙C(j��)�B�ӡ�ͨ�^��Ƭ�C(j��)�\(y��n)�г���?q��)��ߵ��ƽ�ͽo�(q��)��(d��ng)ģ�K�Ķ�����늙C(j��)��ǰ�M(j��n)�����ˡ����D(zhu��n)�������ֹͣ��늙C(j��)�(q��)��(d��ng)���ɰ��Ԏ���(w��n)��оƬ�߉��˽��Դ늉���8v���ң���GND�ӵؾ���Ȼ��ݔ��5v늉���out1��out2�Ì�(d��o)������늙C(j��)�B�ӣ�out3��out4�Ì�(d��o)������늙C(j��)�B�ӡ��(q��)��(d��ng)ģ�K��IN1��IN2�c��Ƭ�C(j��)��p1.2��p1.3�B�ӣ�IN3��IN4�c��Ƭ�C(j��) ��p1.6��p1.7�B�ӡ�ʹ�ܶ�ENA��ENBͨ�^��ñ�B�ӡ� 늙C(j��)�(q��)��(d��ng)����L298N����оƬ�c��Ƭ�C(j��)��늙C(j��)�B�ӡ�ͨ�^��Ƭ�C(j��)�\(y��n)�г���?q��)��ߵ��ƽ�ͽo�(q��)��(d��ng)ģ�K�Ķ�����늙C(j��)��ǰ�M(j��n)�����ˡ����D(zhu��n)�������ֹͣ��늙C(j��)�(q��)��(d��ng)���ɰ��Ԏ���(w��n)��оƬ�߉��˽��Դ늉���8v���ң���GND�ӵؾ���Ȼ��ݔ��5v늉���out1��out2�Ì�(d��o)������늙C(j��)�B�ӣ�out3��out4�Ì�(d��o)������늙C(j��)�B�ӡ��(q��)��(d��ng)ģ�K��IN1��IN2�c��Ƭ�C(j��)��p1.2��p1.3�B�ӣ�IN3��IN4�c��Ƭ�C(j��) ��p1.6��p1.7�B�ӡ�ʹ�ܶ�ENA��ENBͨ�^��ñ�B�ӡ�
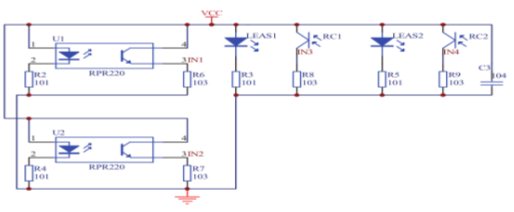
2.1.5 �t�⌤�Eģ�K����  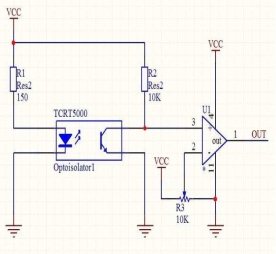 �t�⌤�E���Ãɂ�(g��)���ɵļt�⌦(du��)�ܡ��t�⌦(du��)���аl(f��)��ܺͽ��չܣ��l(f��)��ܰl(f��)��t�⾀�����չܽ��ա�һ��(g��)�t�⌦(du��)����3��(g��)���_��VCC���_��5v�ƽ��GND���_�ӵأ�OUT���_ݔ���ߵ��ƽ��ͨ�^�Ű�c��Ƭ�C(j��)�B�ӡ���t�⌦(du��)���c��Ƭ�C(j��)p3.7���_�B�ӣ��Ҽt�⌦(du��)���c��Ƭ�C(j��)p3.6���_�B�ӡ����]�Ќ� �t�⌤�E���Ãɂ�(g��)���ɵļt�⌦(du��)�ܡ��t�⌦(du��)���аl(f��)��ܺͽ��չܣ��l(f��)��ܰl(f��)��t�⾀�����չܽ��ա�һ��(g��)�t�⌦(du��)����3��(g��)���_��VCC���_��5v�ƽ��GND���_�ӵأ�OUT���_ݔ���ߵ��ƽ��ͨ�^�Ű�c��Ƭ�C(j��)�B�ӡ���t�⌦(du��)���c��Ƭ�C(j��)p3.7���_�B�ӣ��Ҽt�⌦(du��)���c��Ƭ�C(j��)p3.6���_�B�ӡ����]�Ќ�
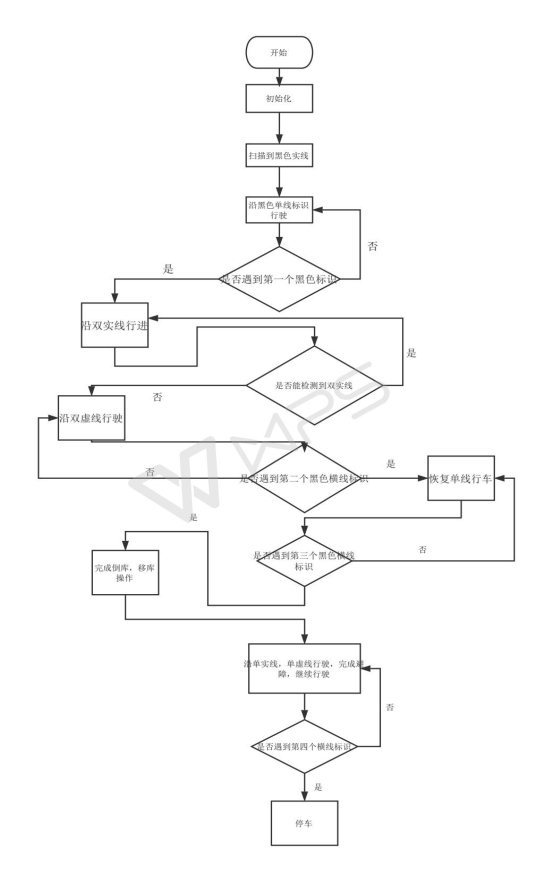
���ھ������չܽ��յ�����ļt��⣬�������׃С��ݔ�����ƽ��0�������ھ������չܲ��ܽ��յ��t��⣬��������С��׃��ݔ�����ƽ��1������Ƭ�C(j��)̎���ߵ��ƽ���o늙C(j��)�(q��)��(d��ng)ģ�Kݔ������Ķ�����늙C(j��)���\(y��n)�С� 3 �·�c�����O(sh��)Ӌ(j��) ����(j��)�}ĿҪ�Ѽ��g(sh��)ָ��(bi��o)���䵽����D�������̈D�и����֣�������Ԫ�·�����ģ�K�У����O(sh��)Ӌ(j��)����Ԫ֮�g��ƥ���P(gu��n)ϵ��(du��)����Ԫ�ļ��g(sh��)Ҫ�� 3.1 �·���O(sh��)Ӌ(j��) 3.1.1ϵ�y(t��ng)���w��D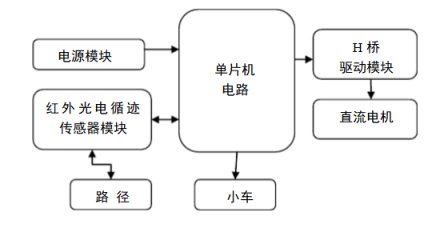 �D4 ϵ�y(t��ng)���w��D 3.2 ������O(sh��)Ӌ(j��) 3.2.1�����������c�O(sh��)Ӌ(j��)˼· ������С܇ֱ�ߣ����D(zhu��n)�����D(zhu��n)��ֹͣ���ӕr(sh��)�����E�ӳ��� ��If��while���Z�䌢С܇�������E�Լ����ڰ����á�0��1����ʾ���������Eݔ���顮1����δ����ݔ���顮0������IN1=1,IN2=0����ʾС܇��݆���D(zhu��n)����IN3=1,IN4=0����ʾС܇��݆���D(zhu��n)����IN1=0,IN2=1����ʾС܇��݆���D(zhu��n)����IN3=0,IN4=1����ʾС܇��݆���D(zhu��n)����IN1=1,IN2=0��IN3=1,IN4=0����ʾС܇ֱ�ߣ�ͨ�^�t�⌤�Eģ�K���Ƭ�C(j��)���_ݔ����0��1���ƽ���Ķ���Ƭ�C(j��)����늙C(j��)�(q��)��(d��ng)оƬ�(q��)��(d��ng)늙C(j��)���E���ߡ� 3.2.2�������̈D��Ҋ���1 4 �yԇ�����c�yԇ�Y(ji��)�� ����(j��)���w�O(sh��)Ӌ(j��)��(du��)����Ԫ�·��Ҫ��(sh��)�yԓ��Ԫ�·�Č�(du��)��(y��ng)ָ��(bi��o)���ñ������ʽ�г���(sh��)�y��(sh��)��(j��)����(sh��)�y�r(sh��)���Ãx���O(sh��)������Q����̖(h��o)����Щ��(sh��)��(j��)����ܮ�����(sh��)�y������Ҫ��(sh��)��(j��)����������挍(sh��)�� ����(j��)�}Ŀ���g(sh��)Ҫ�yԇ��Ʒ���w���g(sh��)ָ��(bi��o)���ñ������ʽ�г���(sh��)�y��(sh��)��(j��)����(sh��)�y�r(sh��)���Ãx���O(sh��)������Q����̖(h��o)����Щ��(sh��)��(j��)����ܮ�����(sh��)�y������Ҫ��(sh��)��(j��)����������挍(sh��)�� 4.1 �yԇ���� ���O(sh��)Ӌ(j��)�ij����䛵���Ƭ�C(j��)�У��������Ƶ�ِ���yԇС܇��������r��ͨ�^С܇���\(y��n)���г��F(xi��n)�Ć��}�ڳ������M(j��n)�и��ģ����^�m(x��)�M(j��n)�����ߜyԇ�� 4.2 �yԇ�l���c�x�� �l�����⾀�����ķ��g�� ���ߣ����������a���ݽz���ݽz����С�����Q�ӵȡ� �x�����f�ñ���Ӌ(j��)��C(j��)�� 4.3 �yԇ�Y(ji��)�������� 4.3.1 �yԇ�Y(ji��)��(��(sh��)��(j��)) �Y(ji��)����С܇ֻ���M(j��n)�Іκھ����E 4.3.2�yԇ�����c�Y(ji��)Փ ������С܇Ӳ��ȱ�ټt���հl(f��)�ܣ�ֻ���M(j��n)�кھ����E��ܛ�����̲��쾚���������ϳ���δ���{(di��o)ԇ�ɹ��� 5 �ĵ��w��(hu��) ���յ��Lͨ����ِ֪ͨ�{�������еğ����c���棬�҂���Ѹ�ٵĽM�(du��)���ӣ������c�^���Ǯ����D���c���y�ģ�������o���y��Ó�f�������ڱ�����n�}�У���(j��ng)�^�J(r��n)�濼�]���C�ό�(sh��)�H���أ��҂����x����ѭ�EС܇���}Ŀ��
�����X�Л]�нz���^�w���҂��ͯ�����ھW(w��ng)�j(lu��)�ό�����Ϣ����?q��)��I(y��)�Ը���(qi��ng)�Ļ����Ԯ��߀ُ�I��һ��(g��)��ƷС܇�J(r��n)���о���Ȼ�������^����Ȼ����������С܇��ƴ��������ε�һ��(g��)�h(hu��n)��(ji��)����������������������^�İ��b�ϸ��Nϵ�y(t��ng)߀���҂��M(f��i)�M����˼�����⣬��ģ�K�ĺ���Ҳ�ǂ�(g��)����(x��)��mȻ����(f��)���������Lԇ�Y(ji��)��Ҳֻ�����Dz(qi��ng)���⡣
��(d��ng)С܇���������ε�ֱ���\(y��n)��(d��ng)���҂������䌍(sh��)�F(xi��n)����Ĺ��ܣ��ɳ���ľ����������ǙM��?c��)��҂���ǰ��һ���y�}���vȻ�ǏU����ʳ���҂�Ҳֻ�������˺��ε�ѭ�Eģ�K����(du��)�ڸ������y�Ĺ��ܣ������������㣬�r(sh��)�g�o�ȣ��n�̾o�����K��δ�܌�(sh��)�F(xi��n)���҂���(sh��)���Ǹе��z���c������
����mȻ�҂��ij�Ʒʮ�ֺ�ª�����ܲ�ȫ�����@�K�w���҂�С�MŬ���ijɹ������҂�����Ѫ֮�����҂���(du��)�Լ������ĸе�������(du��)δ�܌�(sh��)�F(xi��n)�ĕ�(hu��)�^�m(x��)�о���������Ʒ���҂�С�M�����(qi��ng)�ģ����҂��ñMȫ������(ji��n)����ʯ�� ���1���·ԭ��D �D12 �������̈D
������Word��ʽ�ęn51�����d��ַ��
 ѭ�EС܇ ��Ӱ�.docx
(499.79 KB, ���d��(sh��): 44)
ѭ�EС܇ ��Ӱ�.docx
(499.79 KB, ���d��(sh��): 44)
2018-7-12 19:29 �ς�
�c(di��n)���ļ������d����
Փ�ļ�Դ���� ���d�e��: �ڎ� -5
| 




 ����TQQ:125739409;���g(sh��)����QQȺ281945664
����TQQ:125739409;���g(sh��)����QQȺ281945664





 QQ���Ѻ�Ⱥ
QQ���Ѻ�Ⱥ QQ���g
QQ���g �vӍ��
�vӍ�� �vӍ����
�vӍ���� �ղ�
�ղ� ����
���� �
� ��
��