目錄
一、數控回轉工作臺的原理與應用
1.1數控回轉工作臺
1.2 設計準則
1.3 主要技術參數
1.4 本章小結
二、數控回轉工作臺的部分原理及結構設計
2.1 步進電機的原理
2.2 傳動方案傳動時應滿足的要求
2.3數控回轉工作臺功能的實現
2.4 步進電機的選擇及機械系統設計
2.5軸承的選用
2.6 軸承的游隙及軸上零件的調配
2.7 滾動軸承的配合
2.8 滾動軸承的潤滑
三、控制和驅動系統設計
3.1 系統方案設計構成
1. 控制系統應滿足的條件
2. 控制系統總設計
3. 單片機
四、控制系統仿真
總結
緒論
課程設計主要是培養學生綜合應用所學專業的基礎理論、基本技能和專業知識的能力,培養學生建立正確的設計思想,掌握工程設計的一般程序、規范和方法。而本科類學生更應側重于從生產的第一線獲得產品的工藝需求和設計思路,獲得工程技術經用性崗位的基本訓練,通過課程設計,可樹立正確的經濟觀點和全局觀點,實現由學生向工程技術人員的過渡。
使學生進一步鞏固和加深對所學的知識,使之系統化、綜合化。培養學生獨立工作、獨立思考和綜合運用所學知識的技能,提高解決本專業范圍內的一般工程技術問題的能力,從而擴大、深化所學的專業知識和技能。培養學生的設計計算、工程繪圖、實驗研究、數據處理、查閱文獻、外文資料的閱讀與翻譯、計算機應用、文字表達等基本工作實踐能力,使學生初步掌握科學研究的基本方法和思路。使學生學會初步掌握解決工程技術問題的正確指導思想、方法手段,樹立做事嚴謹、嚴肅認真、一絲不茍、實事求是、刻苦鉆研、勇于探索、具有創新意識和團結協作的工作作風。
本次課程設計主要是解決數控回轉工作臺的工作原理和控制系統的設計。設計思路是先功能需求后系統結構。目前數控回轉工作臺已廣泛應用于數控機床和加工中心上,它的總的發展趨勢是:在規格上將向兩頭延伸,即開發小型和大型轉臺;在性能上將研制以鋼為材料的蝸輪,大幅度提高工作臺轉速和轉臺的承載能力;在形式上繼續研制兩軸聯動和多軸并聯回轉的數控轉臺。
數控轉臺的市場分析:隨著我國制造業的發展,加工中心將會越來越多地被要求配備第四軸或第五軸,以擴大加工范圍。估計近幾年要求配備數控轉臺的加工中心將會達到每年600臺左右。預計未來5年,雖然某些行業由于產能過剩、受到宏觀調控的影響而繼續保持著較低的行業景氣度外,部分裝備制造業將有望保持較高的增長率,特別是那些國家產業政策鼓勵振興和發展的裝備子行業。作為裝備制造業的母機,普通加工機床將獲得年均15%-20%左右的穩定增長
數控機床的圓周進給由回轉工作臺完成,稱為數控機床的第四軸:回轉工作臺可以與X、Y、Z三個坐標軸聯動,從而加工出各種球、圓弧曲線等。回轉工作臺可以實現精確的自動分度,擴大了數控機床加工范圍。
1.1數控回轉工作臺數控回轉工作臺主要用于數控鏜床和銑床,其外形和通用工作臺幾乎一樣,但它的驅動是伺服系統的驅動方式。它可以與其他伺服進給軸聯動。 自動換刀數控鏜床的回轉工作臺的進給、分度轉位和定位鎖緊都是由給定的指令進行控制的。工作臺的運動是由伺服電動機,經齒輪減速后由蝸桿傳給蝸輪 。
為了消除蝸桿副的傳動間隙,采用了雙螺距漸厚蝸桿,通過移動蝸桿的軸向位置宋調整間隙。這種蝸桿的左右兩側面具有不同的螺距,因此蝸桿齒厚從頭到尾逐漸增厚。但由于同一側的螺距是相同的,所以仍然可以保持正常的嚙合。
當工作臺靜止時,必須處于鎖緊狀態。為此,在蝸輪底部的輻射方向裝有8對夾緊瓦,并在底座上均布同樣數量的小液壓缸。當小液壓缸的上腔接通壓力油時,活塞便壓向鋼球,撐開夾緊瓦,并夾緊蝸輪。在工作臺需要回轉時,先使小液壓缸的上腔接通回油路,在彈簧的作用下,鋼球抬起,夾緊瓦將蝸輪松開。
回轉工作臺的導軌面由大型滾動軸承支承,并由圓錐滾柱軸承及雙列向心圓柱滾子軸承保持準確的回轉中心。數控回轉工作臺的定位精度主要取決于蝸桿副的傳動精度,因而必須采用高精度蝸桿副。在半閉環控制系統中,可以在實際測量工作臺靜態定位誤差之后,確定需要補償角度的位置和補償的值,記憶在補償回路中,由數控裝置進行誤差補償。在全閉環控制系統中,由高精度的圓光柵發出工作臺精確到位信號,反饋給數控裝置進行控制。
回轉工作臺設有零點,當它作回零運動時,先用擋鐵壓下限位開關,使工作臺降速,然后由圓光柵或編碼器發出零位信號,使工作臺準確地停在零位。數控回轉工作臺可以作任意角度的回轉和分度,也可以作連續回轉進給運動。
1.2 設計準則我們的設計過程中,本著以下幾條設計準則
1.在確定設備整體方案時,除了考慮技術性、經濟性、體積、重量、耗電等外,可靠性是首先要考慮的重要因素。在滿足體積、重量及耗電等于數條件下,必須確立以可靠性、技術先進性及經濟性為準則的最佳構成整體方案。
2.在方案論證時,一定要進行可靠性論證。
3.在確定產品技術指標的同時,應根據需要和實現可能確定可靠性指標與維修性指標。
4.對己投入使用的相同(或相似)的產品,考察其現場可靠性指標,維修性指標及對這兩種備標的影響因素,以確定提高當前研制產可靠性的有效措施。
5.應對可靠性指標和維修性指標進行合理分配,明確分系統(或分機)、不見、以至元器件的的可靠性指標。
6.提出整機的元器件限用要求及選用準則,擬訂元器件優選手冊(或清單)
8.在滿足技術性要求的情況下,盡量簡化方案及電路設計和結構設計 ,減少整機元器件數量及機械結構零件。
9.盡量實施系列化設計。在原有的成熟產品上逐步擴展,抅成系列,在一個型號上不能采用過多的新技術。采用新技術要考慮繼承性。
1.3 主要技術參數(1)最大回轉半徑:80 mm
(2)工作臺輸出精度:2 mrad
(3)最大承載重量10㎏
(4) 具備自鎖功能
1.4 本章小結主要簡單介紹畢業設計題目(數控回轉工作臺)和其發展概況,設計背景、工作原理、設計參數也作了進一步的說明。
2.1 步進電機的原理步進電機是一種能將數字輸入脈沖轉換成旋轉或直線增量運動的電磁執行元件。每輸入一個脈沖電機轉軸步進一個步距角增量。電機總的回轉角與輸入脈沖數成正比例,相應的轉速取決于輸入脈沖頻率。
步進電機是機電一體化產品中關鍵部件之一,通常被用作定位控制和定速控制。步進電機慣量低、定位精度高、無累積誤差、控制簡單等特點。廣泛應用于機電一體化產品中,如:數控機床、包裝機械、計算機外圍設備、復印機、傳真機等。
選擇步進電機時,首先要保證步進電機的輸出功率大于負載所需的功率。而在選用功率步進電機時,首先要計算機械系統的負載轉矩,電機的矩頻特性能滿足機械負載并有一定的余量保證其運行可靠。在實際工作過程中,各種頻率下的負載力矩必須在矩頻特性曲線的范圍內。一般地說最大靜力矩Mjmax大的電機,負載力矩大。
選擇步進電機時,應使步距角和機械系統匹配,這樣可以得到機床所需的脈沖當量。在機械傳動過程中為了使得有更小的脈沖當量,一是可以改變絲桿的導程,二是可以通過步進電機的細分驅動來完成。但細分只能改變其分辨率,不改變其精度。精度是由電機的固有特性所決定。
選擇功率步進電機時,應當估算機械負載的負載慣量和機床要求的啟動頻率,使之與步進電機的慣性頻率特性相匹配還有一定的余量,使之最高速連續工作頻率能滿足機床快速移動的需要。
2.2 傳動方案傳動時應滿足的要求數控回轉工作臺一般由原動機、傳動裝置和工作臺組成,傳動裝置在原動機和工作臺之間傳遞運動和動力,并可實現分度運動。在本課題中,原動機采用步進電機,工作臺為T形槽工作臺,傳動裝置由齒輪傳動和蝸桿傳動組成。
合理的傳動方案主要滿足以下要求:
(1)機械的功能要求:應滿足工作臺的功率、轉速和運動形式的要求。
(2)工作條件的要求:例如工作環境、場地、工作制度等。
(3)工作性能要求:保證工作可靠、傳動效率高等。
(4)結構工藝性要求;如結構簡單、尺寸緊湊、使用維護便利、工藝性和經濟合理等。
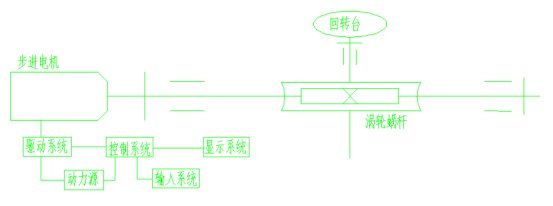
圖 1總體設計簡圖
2.3數控回轉工作臺功能的實現1、機械部分
采用蝸輪蝸桿減速,蝸輪蝸杄傳動平穩,傳動比大,因工作臺轉速較低,所以發熱較輕,蝸桿與電機相連,蝸輪與回轉臺相連。
采用步進電機驅動,選擇適當的步距角與傳動比便可達到分辨率要求。
2、電氣部分
采用專用環形分配器經功率放大電路驅動步進電機。
采用單片機控制環形分配器,并控制顯示系統顯示控制命令。
采用鍵盤輸入控制命令,單片機進行顯示并處理。
2.4 步進電機的選擇及機械系統設計許多機械加工需要微量進給。要實現微量進給,步進電機、直流伺服交流伺服電機都可作為驅動元件。對于后兩者,必須使用精密的傳感器并構成閉環系統,才能實現微量進給。在閉環系統中,廣泛采用步進電機馬達作為執行單元。這是因為步進電機馬達具有以下優點:
(1)直接采用數字量進行控制;
(2)轉動慣量小,啟動、停止方便;
(3)成本低;
(4)無誤差積累;
(5)定位準確;
(6)低頻率特性比較好;
(7)調速范圍較寬;
采用步進電機為驅動單元,其機構也比較簡單。通常步進電機每加一個脈沖轉過一個脈沖當量;但由于其脈沖當量一般較大,如0.01mm,在數控系統中為了保證加工精度,廣泛采用步進電機的細分驅動技術。
1)步進電機的選擇
按照工作要求和條件選Y系列一般用途的全封閉自扇冷鼠籠型三相異步電機。
初選電動機步距角1.5°,由所選電動機的步距角和任務書所要求的精度可得傳動比i=

,任務書要求分辨率為2mrad。
步進電動機的選用:
滑動導軌副的摩擦系數設為f=0.005,導軌半徑為80mm,最大承載重量10kg,則工作臺承受的最大轉矩

=98*0.005*80*10-3=0.0392,故作用在渦輪上的轉矩

=0.0392,蝸桿渦輪減速器有轉矩放大作用,螺桿所承受的轉矩

=0.003。所以步進電機靜轉矩不可低于它,由以上數據選的的步進電機如下表所示。
步進電動機轉速

(r/min);α為步距角(1.5°)
f為通電頻率取f=625;
計算n=156.25(r/min);
2)機械設計
蝸桿傳動設計校核
根據GB/T10086-1988的推薦,采用漸開線蝸桿(ZI)
選擇材料:蝸桿用45號鋼,螺旋齒面淬火,硬度為45-55HRC;渦輪齒圈用鑄錫磷青銅,輪芯用灰鑄鐵。
1.按齒面接觸疲勞強度進行設計:
傳動中心距

.
1)確定作用在渦輪上的轉矩T2
滑動導軌副動摩擦系數f=0.005,導軌半徑為50mm,最大軸向載荷為
Fmax=98N,則工作臺承受最大轉矩Tm=400*0.005*50*10-3
= 0.02 N·m,故作用在渦輪上的轉矩T2=20 N·m
2)確定載荷系數K
因工作荷較穩定,故取載荷分布不均勻系數Kβ=1:由表選取使用系數KA=1:由于轉速不高,可取動載系數Kv=1:則
K= Kβ*KA*Kv=1*1*1=1
3)確定彈性影響系數Z
因選用的是鑄錫磷青銅蝸輪和鋼蝸桿相配,故ZE=160MPa2
4)確定接觸系數Zρ
先假設蝸輪分度圓直徑d1和傳動中心距a的比值d1/a=0.35,從圖中可查得
Zρ=2.9
5)確定許用接觸應力[σH]
根據蝸輪材料為鑄錫磷青鋼銅ZCuSn10P1,金屬模鑄造,蝸桿螺旋齒面硬度>45HRC,可從表中查得蝸桿的基本許用應力[σH]’=268Mpa。
應力循環次數N=6jn2Lh=60*1*

*10000=6.7*10^6
壽命系數KHN=

=1.05
則[σH]=KHN*[σH]’= 1.05*268Mpa=281.78Mpa
6)計算中心距
a≥

mm= 4.73mm
取中心距a=50mm,因i=14,故從表取模數m=1.6mm,蝸桿分度圓直徑d1=20mm。這時d1/a=0.4,從圖中可查得接觸系數Zρ’=2.74,因為Zρ’< Zρ因此以上結果可用。
2.蝸桿與蝸輪的主要參數與幾何尺寸
1)蝸桿
蝸桿頭數Z1=2;軸向齒距Pa=Πm=5.027;直徑系數q=12.5:齒頂圓直徑
da=23.2mm(ha*=1,c*=0.2);齒根圓直徑dn=16.16:分度圓導程角=9°05’25”;蝸桿軸向齒厚Sa=2.5133mm
2)蝸輪
蝸輪齒數Z2=51:變位系數x2=-0.5
驗算傳動比i=

=

,傳動比大于最低傳動比14,因而是可以的:
蝸輪分度圓直徑d2=mz2=1.6*51mm=81.6 mm
渦輪喉圓直徑da2=d2+2ha2=( +2*0.8)=83.2 mm
渦輪齒根圓直徑df2=d2-2hf2=( -2*2.72)mm= 76.16mm
渦輪咽喉母圓半徑rg2=a-

da2=8.4mm
3.校核齒根彎曲疲勞強度
σF=

YFa2Yβ
當量齒數ZV2=

=52.97
根據X2=-0.5,ZV2=52.97 ,從圖中可查得齒形系數YFa2=2.73。
螺旋角系數Yβ=1-

=1-9.09°/140 =0.9351
許用彎曲應力[σF]=[σF]’KFN
從表中可查得 ACuSn10P1制造蝸輪的基本許用彎曲應力[σF]’=56MPA
壽命系數KFN=

=
[σF]=56*0.832Mpa=46.592 Mpa
σF=

*2.73*0.9351=0.239Mpa
彎曲強度是滿足的。
4.精度等級公差和表面粗度的確定
考慮到所設計的蝸桿傳動是動力傳動,屬于通用機械減速器,從
GB/T10089-1988圓柱蝸桿、渦輪精度中選擇8級精度,側隙種類為f.標注
為8fGB/T10089-1988。然后由有關手冊差得要求的公差項目及表面粗糙度,
此處從略。
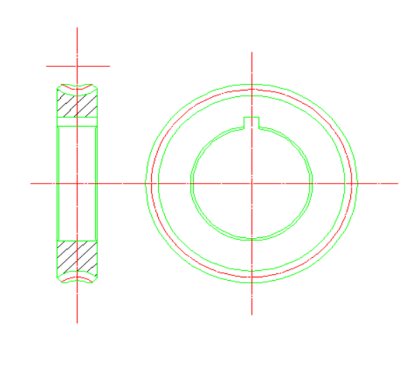
5.蝸輪蝸桿零件圖
2.5軸承的選用滾動軸承是現代機器中廣泛應用的部件之一。它是依靠主要元件的滾動接觸來支撐轉動零件的。與滑動軸承相比,滾動軸承摩擦力小,功率消耗少,啟動容易等優點。并且常用的滾動軸承絕大多數已經標準化,因此使用滾動軸承時,只要根據具體工作條件
正確選擇軸承的類型和尺寸。驗算軸承的承載能力。以及與軸承的安裝、調整、潤滑、密封等有關的“軸承裝置設計”問題。
2.6 軸承的游隙及軸上零件的調配軸承的游隙和欲緊時靠端蓋下的墊片來調整的,這樣比較方便。
2.7 滾動軸承的配合滾動軸承是標準件,為使軸承便于互換和大量生產,軸承內孔于軸的配合采用基孔制,即以軸承內孔的尺寸為基準;軸承外徑與外殼的配合采用基軸制,即以軸承的外徑尺寸為基準。
2.8 滾動軸承的潤滑考慮到電動刀架工作時轉速很高,并且是不間斷工作,溫度也很高。故采用油潤滑,轉速越高,應采用粘度越低的潤滑油;載荷越大,應選用粘度越高的。
3.1 系統方案設計構成- 由鍵盤輸入命令,顯示器顯示,以直觀的判別是否輸出對;
- 有復位按鍵,可以重新輸入,重新旋轉。
- 回轉工作臺可以連續旋轉定角旋轉,分正逆方向;

0.png (4.87 KB, 下載次數: 37)
下載附件
2018-7-19 04:28 上傳
由鍵盤按順序輸入五位數字:
第一位:運行方向,“1”為正向運行,“0”為逆向運行,存于18H;
第二位:運行模式,“0”為連續運行模式,“1”為定角度運行模式,存于19H
第三位:運行角度百位數,在連續運行模式時此位無效,在定角度運行模式時此位乘以100即為旋轉度數,存于1AH;
第四位:運行角度十位數,在連續運行模式時此位無效,在定角度運行模式時此位乘以10即為旋轉度數,存于1BH;
第五位:運行角度個位數,在連續運行模式時此位無效,在定角度運行模式時此位乘以1即為旋轉度數,存于1CH;
五位數字輸完后,再輸入數字沒有意義,按下運行鍵,將17H位置01H,顯示程序檢測到17H為01H時,跳轉運行程序。
LED數碼管依次顯示輸入的數據,邊輸入邊顯示,數值輸入完后,按下“運行鍵”,顯示程序檢測到17H為01H后,停止顯示,跳轉運行程序,運行程序處理數據后,單片機發出方向信號與CP脈沖信號,控制環形分配器,環形分配器輸入三相六拍信號,在經過功率放大電路驅動步進電機。任何時候按下“復位”鍵,程序從頭執行,可以重新輸入。
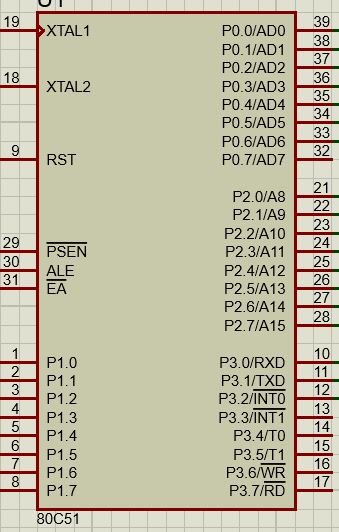
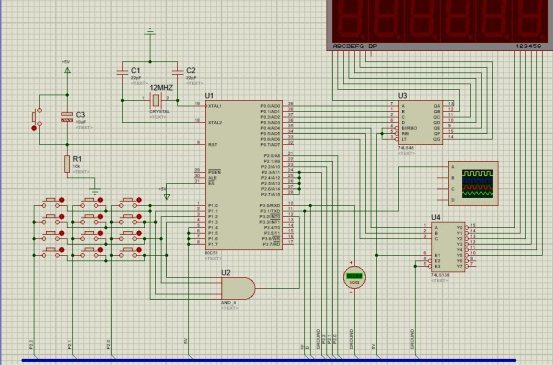
因程序不是很復雜,I/O連接數碼管與環形分配器以及連接鍵盤電路,不需要太多I/O口,故選用80C51單片機,12MHZ振蕩器。
圖2 80c51
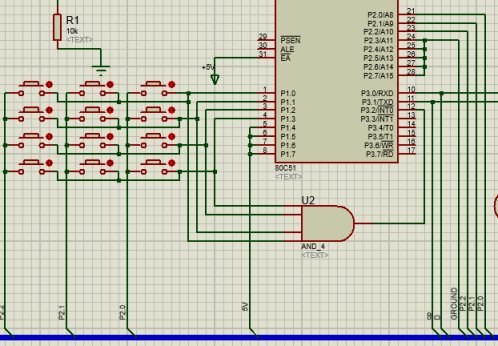
由回轉工作臺的要求,鍵盤應有11個鍵,其中包括“0”“9”“運行鍵”以及復位鍵,采用四行三列中斷式鍵盤。
鍵盤電路如下圖;
如圖所示,p1.0到p1.3與鍵盤行線連接,鍵盤行線通過與門與INTO連接,初始化時p1口寫1,p2口寫0,按鍵閉合時,INTO電平由高變低,響應中斷,p1口的高電平被p2口的低電平拉低,此時p1口即為行值,接著p2口輪流送高電平,檢測p1口電平,當p1口全為高電平時,此時p2口即為列值。接著由行值與列值判斷出鍵值,存于指定位置。鍵盤掃描程序完畢。按鍵行列值表如下:
單片機初始程序與鍵盤掃描程序如下:
- ORG 0000H
- AJMP CHUSHI
- ORG 0003H
- AJMP JPSM;中斷0地址
- ORG 0100H
- CHUSHI: MOV SP,#4FH;堆棧區
- MOV TMOD,#00H;置定時器
- SETB IT0;INT0脈沖沖觸發方式
- MOV R0,#18H;數據存放首地址
- MOV R1,#00H;存放顯示位數
- MOV 17H,#00H;運行標志位置零
- MOV A,#0ffH;P1口置1
- MOV P1,A
- MOV A,#00H
- MOV P2,A
- MOV IE,#81H;開中斷
- AJMP DISPLAY
- RETURN: RETI
- JPSM: CLR EA;建盤盤掃描子程序,關閉總中斷
- XIAODOU: MOV A,#0FFH;讀行線,消除抖動
- MOV P1,A
- MOV A,P1
- MOV R3, A
- LCALL D_10ms;其中D_10ms為延日時子程序.延時10ms
- MOV A,#0FFH
- MOV P1,A
- MOV A, P1
- CJNE A,03H,RETURN;兩次結果不一致,轉 RETURN,相等則R3中存放行值
- MOV R2,#01H
- SJMP LIEZHI_2
- LIEZHI_1: MOV A, R2
- RL A
- MOV R2,A
- LIEZHI_2: MOV A,R2
- MOV P2,A
- MOV A ,#0FFH
- MOV P1, A
- MOV A,P1
- MOV R4, A
- CJNE R4,#0FFH,LIEZHI_1;相等則R2中存放列值
- MOV A,#00H
- MOV P2,A
- HANG_1 : CJNE R3,#0FEH,HANG_2
- HANG_1_1 : CJNE R2,#01H,HANG_1_2
- MOV @R0, #09H
- INC R0
- SETB EA;開中斷
- RETI
- HANG_1_2: CJNE R2,#02H, RETURN
- MOV 17H,01H;置運行標志位
- SETB EA;開中斷
- RETI
- HANG_2: CJNE R3 ,#0FDH,HANG_3
- HANG_2_1: CJNE R2,#01H,HANG_2_2
- MOV @R0, #06H
- INC R0
- SETB EA;開中斷
- RETI
- HANG_2_2: CJNE R2,#02H,HANG_2_3
- MOV @R0,#07H
- INC R0
- SETB EA;開中斷
- RETI
- HANG_2_3: CJNE R2,#04H,RETURN
- MOV @R0,#08H
- INC R0
- SETB EA;開中斷
- RETI
- HANG_3: CJNE R3, #0FBH, HANG_4
- HANG_3_1: CJNE R2,#01H,HANG_3_2
- MOV@R0,#03H
- INC R0
- SETB EA;開中斷
- RETI
- HANG_3_2: CJNE R2,#02H,HANG_3_3
- MOV @R0, #04H
- INC R0
- SETB EA;開中斷
- RETI
- HANG_3_3: CJNE R2, #04, RETURN
- MOV @R0, #05H
- INC R0
- SETB EA;開中斷
- RETI
- HANG_4: CJNE R3,#0F7H,RETURN_1
- HANG_4_1: CJNE R2,#01H,HANG_4_2
- MOV @R0, #00H
- INC R0
- SETB EA;開中斷
- RETI
- HANG_4_2: CJNE R2,#02H,HANG_4_3
- MOV @R0, #01H
- INC R0
- SETB EA;開中斷
- RETI
- HANG_4_3: CJNE R2,#04H,RETURN_1
- MOV @R0, #02H
- INC R0
- SETB EA;開中斷
- RETI
- RETURN_1: RETI
其中D-10ms為延時子程序,延時10ms。
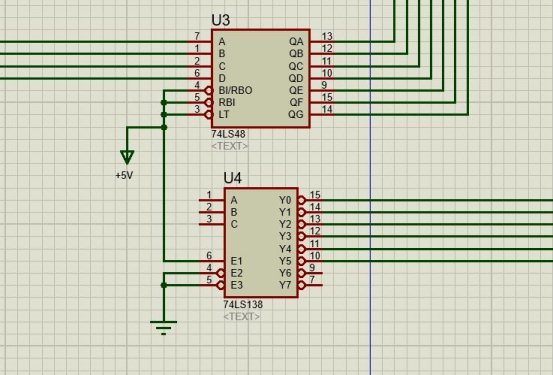
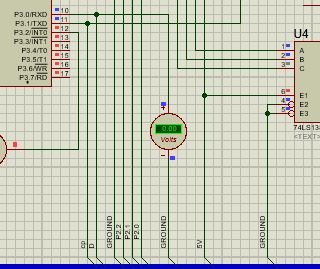
2)顯示電路及顯示輸入的五位數據,因而需要五個LED數碼管,選用7SEG-MPX6-CC共陰極數碼管,為了輸出字位碼與字形碼,僅用單片機自帶I/O腳管是不夠的,因而增加74LS48與74LS138,前者輸出字形碼,后者輸出字位碼。
圖 3 74LS48和74LS138
其中E1連接+5V電壓,E1,E2與E3接地,Y0~Y5連接7SEG-MPX6-CC的位碼線。
(1)7SEG-MPX6-CC電路
電路連接如下圖所示
圖 4 7SEG-MPX6-CC
(2)顯示程序
#18H送R1,#00H送R5(字位碼)
R1是否和R0相等
R5的高四位互換與R1所指數據相互送P0口
延時10ms
R1自加14
R5自加1
DISPLAY: MOV A,17H
JNZ YUNXING
MOV R5, #00H;字位碼
MOV R1, #18H
XIANSHI: MOV A,R1
CJNE A ,00H, XUNHUAN
AJMP DISPLAY
XUNHUAN: CJNE A,#1DH, XUNHUAN_1
AJMP DISPLAY
XUNHUAN_1: MOV A,@R1
MOV R7, A;R7的低四位放字形碼,高四位放字形碼
MOV A, R5
SWAP A
ORL A,R7
MOV P0,A
LCALL D_10ms
INC R5
INC R1
AJMP XIANSHI
3)運行程序
單片機輸出CP脈沖頻率:
使用定時器0,門控位GATE置0,以運行控制位TR0啟動定時器,C/T位置0,采用定時工作方式,M1M0=00,定時器采用0方式,ET0置0,禁止定時/計數中斷,CH250的CP脈沖頻率由前所述應為625HZ,固定時器所定時間應為
1/625*2s=800us
(2^13-x)*1/2*12us=800us
進制轉換: x=2^13-800=7392=1110011100000B
所以TH0=#0E7H,TLO=#00H
(1)模式0,連續回轉模式
程序如下:
YUNXING: CLR EA;禁止中斷
MOV A,18H;18H中存放方向標志位
CJNE A, #00H, FX_1;18H不為0則轉FX1
FX_0: CLR 00H
MOV C,00H;將CY置0
MOV P3.0,C;將CY值送P3.0,P3.0連接CH250的CP口
AJMP YS
FX_1: CLR 01H
MOV C, 00H;將CY置1
MOV P3.0, C;將CY值送P3.0,P3.0連接CH250的CP口
YS: MOV A,19H
CJNE A,#00H, MODEL_1;19H若為#00H則為0模式,不跳轉
MODEL_0: CLR P3.1
LOOP_1: CPL P3.1
CLR TF0;清定時器0的溢出標志位
MOV TH0, #0E7H;置定時器初值
MOV TL0, #00H
SETB TR0;開始定時
LOOP_2: JBC TF0, LOOP_1;如果定時器0溢出轉LOOP1,否則繼續續檢測
AJMP LOOP_2
(2)模式1,定角度模式
i=51/2=25.5
工作臺轉1°則步進電機需轉60′/(1.5°×60/25.5)=17步,因定時器到時兩次步進電機旋一個步距角,所以定時器到時34次,工作臺旋轉1°為了利于程序編制,將程序分為三部分,第一部分為百位部分,第二部分為十位部分,第三部分為個位部分。這三個部分由前到后依次執行,即發出定數目的脈沖,全部執行完后所發脈沖數相加即為輸入命令所要求的。三段程序結構相同,現僅就百位部分進行詳細說明,鍵盤所輸入的回轉角度百位數乘以100再乘以34就是定時器應溢出的次數,所以使用DINZ指令使定時程序段重復運行以上所述次數,便可以完成百位數部分脈沖個數要求,十位部分與個位部分與百位部分相同。
程序如下:
- MODEL_1: CLR P3.1
- MOV A, 1AH
- CJNE A, #00H, BAIWEI;百位數判0,如如果為零跳轉十位數判0,否則百位循環
- AJMP SHIWEI_1
- BAIWEI: MOV 15H,#22H;百位循環,回轉工作臺旋轉1度對應定時器溢出次數34=22H
- LOOP1_2: MOV 12H, #64H
- LOOP1_1: MOV R1, 1AH;將由鍵盤輸入的百位度數給R1
- LOOP1_3: CPL P3.1 ;由P3.1輸出CP脈沖
- CLR TF0
- MOV TH0, #0E7H
- MOV TL0, #00H
- SETB TR0
- LOOP1_4: JBC TF0, LOOP1_5;檢測定時器0是否溢出,溢出則轉L0OP1_5,否則繼續檢測
- AJMP LOOP1_4
- LOOP1_5: DJNZ R1, LOOP1_3
- DJNZ 12H,LOOP1_1
- DJNZ 15H,LOOP1_2
- SHIWEI_1: MOV A, 1BH ;十位循環
- CJNE A, #00H, SHIWEI
- AJMP GEWEI_1
- SHIWEI: MOV 15H,#22H
- LOOP2_2: MOV 13H, #0AH
- LOOP2_1: MOV R2, 1BH
- LOOP2_3: CPL P3.1
- CLR TF0
- MOV TH0, #0E7H
- MOV TL0, #00H
- SETB TR0
- LOOP2_4: JBC TF0, LOOP2_5
- AJMP LOOP2_4
- LOOP2_5: DJNZ R2, LOOP2_3
- DJNZ 13H, LOOP2_1
- DJNZ 15H, LOOP2_2
- GEWEI_1: MOV A,1CH ;個位循環
- CJNE A, #00H, GEWEI
- AJMP HERE
- GEWEI: MOV 15H, #22H
- LOOP3_2: MOV 14H, #01H
- LOOP3_1: MOV R3, 1CH
- LOOP3_3: CPL P3.1
- CLR TF0
- MOV TH0, #0E7H
- MOV TL0,#00H
- SETB TR0
- LOOP3_4: JBC TF0, LOOP3_5
- AJMP LOOP3_4
- LOOP3_5: DJNZ R3,LOOP3_3
- DJNZ 14H, LOOP3_1
- DJNZ 15H, LOOP3_2
- HERE: SJMP HERE
4)延時子程序
按前述要求,鍵盤防抖與顯示程序所需,延時程序需要有10ms的延時,使
用12MHz振蕩器,故一個機器周期為1us。
程序如下:
D_10ms: MOV11H#32H;1*1us
LOOP: MOV 10H,#63H;*50us
DJNZ 10H,$;2*99*50us,原地跳轉
DJNZ 11H,LOOP;2*50us,(1+50+9900+100)us=10050us≈10ms
RET
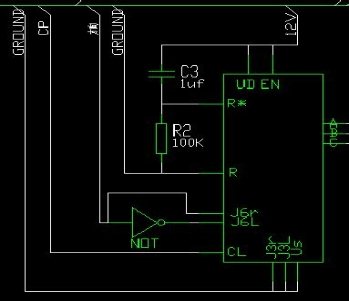
5)環形分配器電路
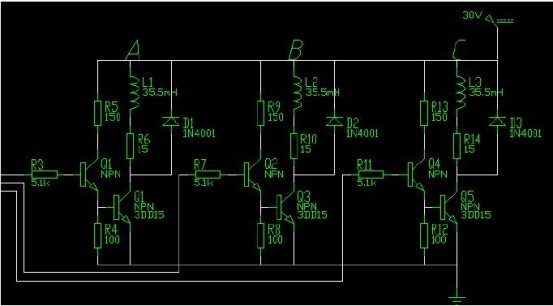
6)功率放大電路
采用單電壓功率放大電路,如圖所示,A、B、C分別為步進電機的三相,每相由一組放大器驅動。放大器輸入端與環形脈沖分配器相連。在沒有脈沖輸入時,3DK4和3DD15功率晶體管均截止,繞組中無電流通過。電動機不轉。當A相得電時,電動機轉動一步。當脈沖依次加到到A、B、C三個輸入端時,三組放大器分別驅動不同的繞組,使電動機一步一步轉動。電路終于繞組并聯的二極管VD起續流作用,記載功功放管截止時,使儲存在繞組中的能量通過二極管形成續流回路泄放,從而保護功放管。與繞組W串聯的電阻R為限流電阻,限制通過繞組的電流不致超過其額定值,以免電動機發熱厲害被燒壞。R的阻值一般在5“2092范圍內選取。
電路如下圖:
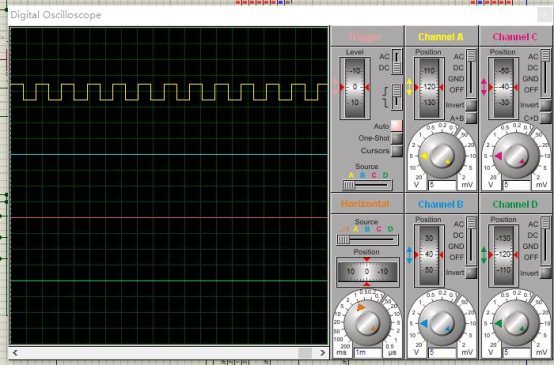
Protues是一款可以對各種電路進行仿真的軟件,可以驗證電路連線與程序的正確性,現將仿真步驟與結果向述于下。
仿真方法:由前所述連接電路,因本軟件沒有環形分配器CH250,故僅對單片機發出的方向信號與脈沖信號進行檢驗是否滿足要求,由前所述,為了滿足工作臺的回轉要求,步進電機運行頻率為625步/s,環形分配器每接到一個上升沿則走一拍,因而單片機的脈沖頻率應為625HZ,即單片機發出的脈沖周期應為1/625=1.6ms,電壓為5V。
1、由前所述,連接仿真電路,從 DEVICES中PICK各種種元器件,并連接之,最后將示波器與P3.0和P3.1相連,電路圖如下:
其中用電壓表來檢測方向電壓是否正確,示波器來檢測脈沖波形是否正確;單片機所需程序由Keil軟件輸入,并導出成為hex文件,由上圖的單片機擊導入,并設定 Clock Frequency為12MHz,點擊仿真按鈕開始仿真。
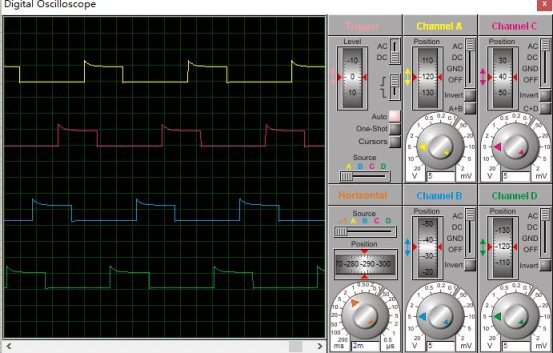
2、將指令“00000”輸入(后三個零可以不用輸入,因為是連續運轉,輸不輸
入皆可以),按下“運行”鍵,指令表示正方向連續運轉,運行結果如下圖所示:
總結為期三周的機電一體化課程設計在這里終于改一段落了,由于自己的知識有限,這次的課程設計遇到了不少問題,很多地方也有欠缺,不過這個過程還是使我受益匪淺。通過這次的課程設計使我加深了對理論知識的理解,并且對于之前的實習及課程設計有了更深刻的認識
課程設計是我們在完成之前的教學計劃所規定的全部課之后,綜合運用所學過的全部理論知識與實踐相結合的實踐性數學環節。它培養我們進行綜合分析和提高解決實際問題的能力,從而達到鞏固,擴大,深化所學知識的目的,它培養我們調查研究熟悉有關技術政策,運用國家標準,規范,手冊,圖冊等工具書,進行設計計算,數據處理,編寫技術文件的獨立工作能力。
通過我學到了很多,初步的讓我認識到理論和實踐相結合的重要。除了鞏固了所學的理論知識外,還學到不少的新知識和新方法。通過本次的設計使我對CAXA操作更熟練,能夠完整的畫出單片機接線圖圖紙。
剛開始做這個設計的時候,我幾乎是無從下手的.在同學的指導和自己不斷的錯誤和摸索下找到了一定的方法. 不過在做這個設計的時候還是遇到了很多問題,如在控制設計的時候對接線圖的設計處理不當,遺漏了很多解口問題等等。設計控制程序時,遺漏了延時程序,這些錯誤我用了很長的時長的時間才做好,幸好還是完成了這次設計,使自己對數控機床的工作臺有了一定的認識,但我對它里面的很多機械部分還是不太清楚。因而,要學好它,必須掌握不少的其他領域學科的知識,因此還要更多的時間和努力。由于本次設計時間短和水平有限,做的不夠精細,難免有點錯誤懇請各位讀者批評指正。
同時感謝老師們對我的悉心指導!














 QQ好友和群
QQ好友和群 QQ空間
QQ空間 騰訊微博
騰訊微博 騰訊朋友
騰訊朋友 收藏
收藏 淘帖
淘帖 頂
頂 踩
踩


