����51��Ƭ�C(j��)�Ĝؿ��L(f��ng)���O(sh��)Ӌ(j��)
ժҪ
���ן�������˂�����L(f��ng)�ȁ�(l��i)���أ��ڹ��I(y��)���a(ch��n)�У����͙C(j��)е����L(f��ng)�ȁ�(l��i)ɢ��ȡ��S���ضȿ��Ƶļ��g(sh��)����l(f��)չ����(y��ng)�\(y��n)�����Ĝؿ���L(f��ng)��Ҳ��u���M(j��n)���˂��������С��ؿ���L(f��ng)�ȿ��Ը���(j��)�h(hu��n)���ض��Ԅ�(d��ng)�{(di��o)��(ji��)��L(f��ng)�Ȇ�ͣ�c�D(zhu��n)�٣��ڌ�(sh��)�H�����ʹ���У��ؿ��L(f��ng)�Ȳ��H�ɹ�(ji��)ʡ���F����YԴ��Ҳ������˂�����������a(ch��n)��
���O(sh��)Ӌ(j��)��һ�N�ؿ��L(f��ng)��ϵ�y(t��ng)�������`���ĜضȸМy(c��)���@ʾ���ܣ�ϵ�y(t��ng)����STC89C51 ��Ƭ�C(j��)�������ƽ�_(t��i)��(du��)�L(f��ng)���D(zhu��n)���M(j��n)�п��ơ�����DS18B20��(sh��)�֜ضȂ������ɼ���(sh��)�r(sh��)�ضȣ���(j��ng)��Ƭ�C(j��)̎����ͨ�^(gu��)���O���(q��)��(d��ng)ֱ���L(f��ng)�ȵ�늙C(j��)������(j��)�ɼ��Č�(sh��)�r(sh��)�ضȣ���(sh��)�F(xi��n)���L(f��ng)�ȵ�������ͣ�������Ñ��O(sh��)�øߡ��͜ض�ֵ���y(c��)�Üض�ֵ�ڸߵ͜ض�֮�g�r(sh��)���_(k��i)�L(f��ng)�����L(f��ng)�n����(d��ng)�ض����߳��^(gu��)���O(sh��)���Ĝضȕr(sh��)�Ԅ�(d��ng)�ГQ�����L(f��ng)�n����(d��ng)�ض�С�����O(sh��)���Ĝضȕr(sh��)�Ԅ�(d��ng)�P(gu��n)�]�L(f��ng)�ȣ����Ơ�B(t��i)�S���ضȶ�����
Ŀ�
ǰ����
��1�� �wՓ
1.1 �о����n�}��Ŀ�ĺ����x
1.2 �l(f��)չ�F(xi��n)��
��2�� ���w�����x��
2.1 �ضȂ��������x��
2.2 ���ؙC(j��)���x��
2.3�@ʾ�·
2.4�{(di��o)�ٷ�ʽ
��3�� ϵ�y(t��ng)Ӳ���M��
3.1 ϵ�y(t��ng)�Y(ji��)��(g��u)
3.2 ����оƬ��B
3.2.1 STC89C51��(ji��n)��
3.2.2 STC89C51��Ҫ���ܺ����܅���(sh��)
3.2.3 STC89C51��Ƭ�C(j��)���_�f(shu��)��
3.2.4 STC89C51��Ƭ�C(j��)��Сϵ�y(t��ng)
3.2.5 STC89C51�Д༼�g(sh��)����
3.3 DS18B20�ضȲɼ��·
3.3.1 DS18B20 �����c(di��n)����(n��i)����(g��u)��
3.3.3 DS18B20�Ĺ���ԭ��
3.3.3 DS18B20�����r(sh��)��
3.4 ��(sh��)�a���(q��)��(d��ng)�@ʾ�·
3.4.1 ��(sh��)�a���(q��)��(d��ng)�·
3.4.2 ��(sh��)�a���@ʾ�·
3.5 �L(f��ng)���(q��)��(d��ng)�·
3.6 ���Iģ�K
��4�� ϵ�y(t��ng)ܛ���O(sh��)Ӌ(j��)
4.1 ܛ����B
4.1.1 Keil C51
4.1.2 Protel99SE
4.1.3 Proteus
4.2 ���������̈D
4.3 DS18B20�ӳ������̈D
4.4 ��(sh��)�a���@ʾ�ӳ������̈D
4.5 ���I�ӳ������̈D
��5�� ϵ�y(t��ng)�{(di��o)ԇ
5.1 ܛӲ���{(di��o)ԇ
5.1.1 ���I�@ʾ���ֵ��{(di��o)ԇ
5.1.2 ������DS18B20�ضȲɼ������{(di��o)ԇ
5.1.3 �L(f��ng)���{(di��o)���·�����{(di��o)ԇ
5.2 ϵ�y(t��ng)����
5.2.1 ϵ�y(t��ng)��(sh��)�F(xi��n)�Ĺ���
5.2.2 ϵ�y(t��ng)���ܷ���
�Y(ji��)��Փ
�x �o
�����īI(xi��n)
�����
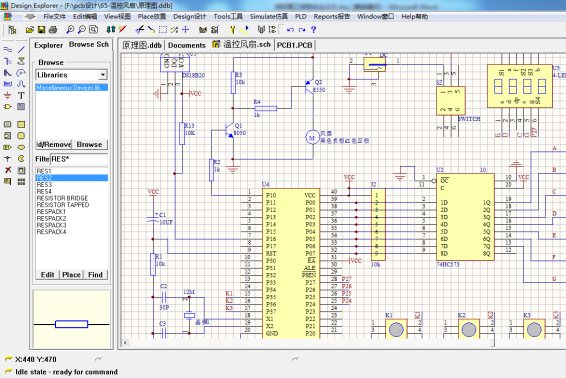
���1��protelԭ��D
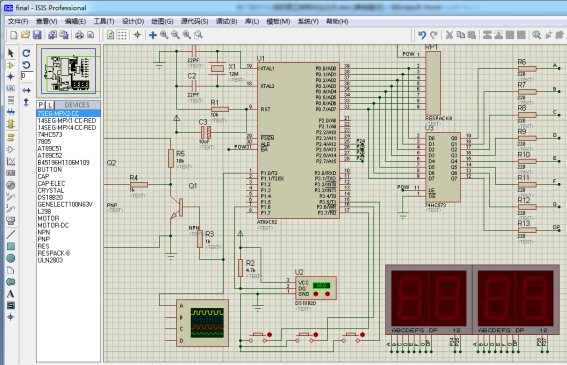
���2��proteus����D
���3��Դ����
�����Y���g��
ǰ����
�ڬF(xi��n)�����(hu��)�У��L(f��ng)�ȱ��V���đ�(y��ng)�ã��l(f��)�]���e���p�ص����ã��������˂��õ�ɢ���L(f��ng)�ȡ����I(y��)���a(ch��n)�д��͙C(j��)е�е�ɢ���L(f��ng)���Լ��F(xi��n)�ڹPӛ����X�ϏV��ʹ�õ�����CPU�L(f��ng)�ȵȡ����S���ضȿ��Ƽ��g(sh��)�İl(f��)չ�����˽����L(f��ng)���\(y��n)�D(zhu��n)�r(sh��)�������Լ���(ji��)ʡ��Դ�ȣ��ؿ��L(f��ng)��Խ��(l��i)Խ�ܵ���ҕ�����V���đ�(y��ng)�á�
�S����Ƭ�C(j��)�ڸ���(g��)�I(l��ng)��ďV����(y��ng)�ã��S���Æ�Ƭ�C(j��)�����ƵĜضȿ���ϵ�y(t��ng)Ҳ��(y��ng)�\(y��n)����������چ�Ƭ�C(j��)�Ĝؿ��L(f��ng)��ϵ�y(t��ng)����ʹ�L(f��ng)�ȸ���(j��)�h(hu��n)���ضȵ�׃����(sh��)�F(xi��n)�Ԅ�(d��ng)��ͣ��ʹ�L(f��ng)���D(zhu��n)���S���h(hu��n)���ضȵ�׃����׃������(sh��)�F(xi��n)���L(f��ng)�ȵ����ܿ��ơ������O(sh��)Ӌ(j��)��F(xi��n)�����(hu��)�˂��������Լ����a(ch��n)����(l��i)���T�������������˂��������|(zh��)�������a(ch��n)Ч�ʵ�ͬ�r(sh��)߀�ܹ�(ji��)ʡ�L(f��ng)���\(y��n)�D(zhu��n)�����������
�����O(sh��)Ӌ(j��)�˻��چ�Ƭ�C(j��)�Ĝؿ��L(f��ng)��ϵ�y(t��ng)���Æ�Ƭ�C(j��)������������ÜضȂ�����DS18B20����ضȲɼ�Ԫ����������(j��)�ɼ����Ĝضȣ�ͨ�^(gu��)�ɂ�(g��)���O���(q��)��(d��ng)�L(f��ng)��늙C(j��)������(j��)�z�y(c��)���Ĝض��cϵ�y(t��ng)�O(sh��)���Ĝضȱ��^��(sh��)�F(xi��n)�L(f��ng)��늙C(j��)���Ԅ�(d��ng)����(d��ng)��ֹͣ�����ܸ���(j��)�ضȵ�׃���Ԅ�(d��ng)��׃�L(f��ng)��늙C(j��)���D(zhu��n)�ٙnλ��ͬ�r(sh��)��LED�˶Δ�(sh��)�a���@ʾ�z�y(c��)���Ĝض��c��(d��ng)ǰ�nλ��ϵ�y(t��ng)���A(y��)�O(sh��)�ضȵ��O(sh��)����ͨ�^(gu��)����(g��)��(d��)�����I��(l��i)��(sh��)�F(xi��n)�ģ�һ��(g��)���O(sh��)�ð��I��һ��(g��)�������A(y��)�O(sh��)�ضȣ�һ��(g��)�ǜpС�A(y��)�O(sh��)�ضȡ�
��1�� �wՓ
1.1 �о����n�}��Ŀ�ĺ����x
�����У��҂���(j��ng)����(hu��)ʹ��һЩ�c�ض����P(gu��n)���O(sh��)�䡣���磬�F(xi��n)���mȻ���ٳ��м�ͥ�����˿��{(di��o)������ռ�Ї�(gu��)���˿ڵ��r(n��ng)��^(q��)���fʹ����L(f��ng)�����齵�ط����O(sh��)�䣬���ģ��������r(sh��)��(ji��)������ض����f�ܸߣ���L(f��ng)�ȑ�(y��ng)���D(zhu��n)�١����L(f��ng)����ʹ�˸е�������������ϣ���ؽ��ͣ���(d��ng)����˯��(y��ng)ԓ�pС�D(zhu��n)�٣�����ʹ�˸�ð���mȻ�L(f��ng)�ȶ����{(di��o)��(ji��)��ͬ�nλ�Ĺ��ܣ������Ҫ���ք�(d��ng)�Q�n��˯���˾͟o(w��)�ܞ����ˣ����ձ���õĶ��r(sh��)���P(gu��n)�]��������һ�����Ƕ��r(sh��)�r(sh��)�g�L(zh��ng)�������ƣ�һ����һ�ɂ�(g��)С�r(sh��)����һ���������һ�ɂ�(g��)С�r(sh��)�������f�](m��i)�н��ͺܶ࣬���L(f��ng)�Ⱦ��P(gu��n)�]�ˣ�ʹ����˯��(m��ng)�П��Ѷ����ò������´��_(k��i)�L(f��ng)�ȣ����Ӷ��r(sh��)���r(sh��)�g���dz��韩�����ҿ��ܶ�ζ��r(sh��)�����һ�ζ��r(sh��)�r(sh��)�g̫�L(zh��ng)���ڜضȽ����Ժ��L(f��ng)�����f�^�m(x��)���L(f��ng)��ʹ�˸�ð������������ֻ�к�(ji��n)�εĵ��˶��r(sh��)�r(sh��)�g���P(gu��n)�]�L(f��ng)���Դ�Ć�һ���ܣ����ܝM����׃����(du��)�L(f��ng)���L(f��ng)�ٴ�С�IJ�ͬҪ���ֱ������^���ʵ���Ӯa(ch��n)Ʒɢ�᷽�棬�F(xi��n)�ڽ^�����(sh��)���������L(f��ng)��ϵ�y(t��ng)�������L(f��ng)������՚�����(d��ng)�����ߟ�����ʹ��Ӯa(ch��n)Ʒ�����ڰl(f��)����ġ�Ҫʹ��Ӯa(ch��n)Ʒ�����^�͵Ĝضȣ�����ô��ʡ����D(zhu��n)�١����L(f��ng)�����L(f��ng)�ȣ����L(f��ng)�ȵ������c�书�ʳ����ȡ����Ҫ���������tҪ�pС�L(f��ng)���D(zhu��n)�٣��֕�(hu��)��������O(sh��)��ض����������܃�ȫ���������Q������(w��n)�}���҂�?c��)O(sh��)Ӌ(j��)���@�לؿ��L(f��ng)��ϵ�y(t��ng)����ϵ�y(t��ng)���ø߾��ȼ��ɜضȂ��������Æ�Ƭ�C(j��)���ƣ����@ʾ��(sh��)�r(sh��)�ضȣ�������(j��)ʹ�����O(sh��)���Ĝض��Ԅ�(d��ng)������(y��ng)�ضȕr(sh��)����С�L(f��ng)�����L(f��ng)��ͣ�C(j��)��(d��ng)�������_�ȸߣ���(d��ng)����(zh��n)�_��
1.2 �l(f��)չ�F(xi��n)��
��(d��ng)�����(hu��)�ѽ�(j��ng)��ȫ�M(j��n)���������Ϣ�����ضȿ������ڸ��и��I(y��)���ѽ�(j��ng)�õ��˳�ֵ����á����Ќ�(du��)�ض��M(j��n)�Ќ�(sh��)�r(sh��)�O(ji��n)�صĹ��ܣ��Ա��C���I(y��)�x�����y(c��)�����ߣ��r(n��ng)�I(y��)�Nֲ�������\(y��n)��������������c(di��n)���܌�(sh��)�r(sh��)�O(ji��n)����?ch��)��ضȵĸߵͣ�����ͬ�r(sh��)����늙C(j��)�\(y��n)����(l��i)��׃�ضȡ����ďV����(y��ng)�ú��ռ��o�˂����ճ������(l��i)�˷��㡣
�ؿ��L(f��ng)�����Æ�Ƭ�C(j��)ϵ�y(t��ng)��(l��i)��ɵ�һ��(g��)С�͵Ŀ���ϵ�y(t��ng)���F(xi��n)�A���\(y��n)���c��(gu��)��(n��i)�ּ�ͥ��ϵ�y(t��ng)Ч��Խ��(l��i)Խ�ߣ��ɱ�ҲԽ��(l��i)Խ�͡���l(f��)չڅ��(sh��)���Ը���(j��)�����|(zh��)�M(j��n)������(y��ng)�ĸ��M(j��n)�����\(y��n)���c��ͬ��(ch��ng)�ϵĜضȱO(ji��n)�y(c��)���ƣ�������(l��i)�����Ľ�(j��ng)��(j��)Ч�档
��2�� ���w�����x��
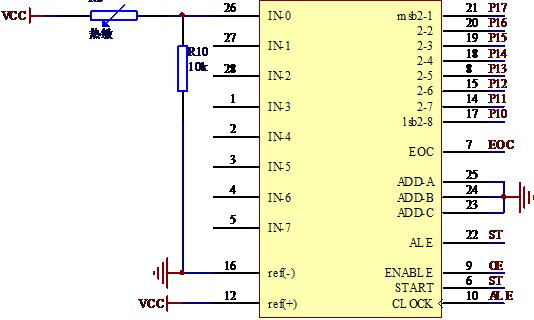
2.1 �ضȂ��������x�� �ضȂ������������N�����ɹ��x�� ����һ���x�ß����������Мy(c��)�ضȵĺ���Ԫ����ͨ�^(gu��)�\(y��n)��Ŵ����Ŵ����ڜض�׃����������������׃�����M(j��n)����(d��o)����ݔ��늉�׃������늉�׃����̖(h��o)������AD�D(zhu��n)�QоƬADC0809��ģ�M��̖(h��o)�D(zhu��n)���锵(sh��)����̖(h��o)ݔ���Ƭ�C(j��)̎�������w�������2-1 �D2-1 �����ضȲɼ��· �����������ß��ż����Мy(c��)�ضȵĺ���Ԫ������Ϙ�ʽ�·���\(y��n)��Ŵ��·��AD�D(zhu��n)�Q�·�����ض�׃����̖(h��o)�����Ƭ�C(j��)̎�����˷���ԭ���ͷ���һ��ԭ����ͬС����AD�D(zhu��n)�Q�·һ�ӣ�����ģ�M��ݔ���̎����ʽ��һ�ӣ����ż��߀��Ҫ��Ϙ�ʽ�·�����w���ӏ�(f��)�s�c(di��n)�����Ǵ˷����Ĝy(c��)�ط������V�� �����������Ô�(sh��)��ʽ���ɜضȂ�����DS18B20����Мy(c��)�ضȵĺ���Ԫ����ֱ��ݔ����(sh��)�֜ض���̖(h��o)����Ƭ�C(j��)̎���� �D2-2 DS18B20�ضȲ��· ��(du��)�ڷ���һ�����ß�������Ѓr(ji��)����ˡ�Ԫ����ُ(g��u)�ă�(y��u)�c(di��n)����������茦(du��)�ضȵļ�(x��)׃�������У�AD0809Ҳֻ��8λ�������@ʾ�ض�Ҳֻ���@ʾ���ȣ������@ʾ��С��(sh��)������̖(h��o)�ɼ����Ŵ��D(zhu��n)�Q�^(gu��)����߀��(hu��)�a(ch��n)��ʧ����`��������ڟ�������R-T�P(gu��n)ϵ�ķǾ��ԣ��䱾����茦(du��)�ضȵ�׃�������^���`��mȻ����ͨ�^(gu��)һ���·���Լm���������H��ʹ�·��(f��)�s��(w��n)���Խ��ͣ����������w��̎�ضȭh(hu��n)���ض�׃�����y�ԙz�y(c��)��С�Ĝض�׃������ԓ�������m�ϱ�ϵ�y(t��ng)�� ��(du��)�ڷ����������ß��ż�͘�ʽ�y(c��)���·����(du��)�ڟ�������䌦(du��)�ضȵ������Ժ������ķǾ����`����^����ߣ���y(c��)�ط���Ҳ�dz�������-50�z�϶ȵ�1600�z�϶Ⱦ��ɜy(c��)����������Ȼ�����·��(f��)�s����(du��)�ض��������_(d��)������ϵ�y(t��ng)Ҫ��Ę�(bi��o)��(zh��n)���ʲ�����ԓ������ ��(du��)�ڷ����������ڔ�(sh��)��ʽ���ɜضȂ�����DS18B20�ĸ߶ȼ��ɻ����������ӷŴ��D(zhu��n)�Q���·���`�����أ��ض��`���С������������Мy(c��)�ضȵ�ԭ���c�����ɷN������ԭ���������|(zh��)�IJ�ͬ��ʹ����ضȷֱ����O�ߡ��ض�ֵ��������(n��i)���D(zhu��n)�Q�ɔ�(sh��)����ֱ��ݔ������(ji��n)����ϵ�y(t��ng)�����O(sh��)Ӌ(j��)��������ԓ�������������M(j��n)�Ćο������g(sh��)��1-WRIE�����c��Ƭ�C(j��)�Ľӿ�׃�ķdz���(ji��n)�������ɔ_������(qi��ng)���P(gu��n)��DS18B20��Ԕ��(x��)����(sh��)�������桰Ӳ���O(sh��)Ӌ(j��)���е�������B��
2.2 ���ؙC(j��)���x�� ����һ���������(y��ng)ϵ�І�Ƭ�C(j��)����ϵ�y(t��ng)�Ŀ����������(y��ng)ϵ�І�Ƭ�C(j��)���Ԍ�(sh��)�F(xi��n)���N��(f��)�s��߉���ܣ�ģ�K���ܶȸߣ�������������������һ�KоƬ�ϣ��p�����w�e������˷�(w��n)���ԡ����(y��ng)ϵ�І�Ƭ�C(j��)�����ϵ�y(t��ng)��̎���ٶȣ��m�������Ҏ(gu��)ģ��(sh��)�r(sh��)ϵ�y(t��ng)�Ŀ��ƺ��ġ� �����������Æ�Ƭ�C(j��)������ƺ��ġ���ܛ�����̵ķ����M(j��n)�Мض��Д࣬���ڶ˿�ݔ��������̖(h��o)�� ��51��Ƭ�C(j��)�r(ji��)������(y��ng)ϵ�е͵ö࣬�ұ��O(sh��)Ӌ(j��)����Ҫ�ܸߵ�̎���ٶȣ��Ľ�(j��ng)��(j��)�ͷ���ʹ�ýǶȿ��]�����O(sh��)Ӌ(j��)�x���˷���������(du��)�ڷ��������Ԇ�Ƭ�C(j��)�����������ͨ�^(gu��)����(xi��)�����܌��������Мy(c��)���Ĝض�ͨ�^(gu��)�@ʾ�·�@ʾ����(l��i)�������Ñ���ͨ�^(gu��)�I�P(p��n)�ӿڣ������O(sh��)�������ބ�(d��ng)���ض�ֵ���M��ȫ��λ��������ͨ�^(gu��)�����Д��ضȾ��ИO�ߵľ���(zh��n)�ȣ��ܾ��_���խh(hu��n)���ضȵ�С׃�����ʱ�ϵ�y(t��ng)���÷�������
2.3�@ʾ�· ����һ�����Ô�(sh��)�a���@ʾ�ضȣ���(d��ng)�B(t��i)�����@ʾ��ʽ������LED��(sh��)�a���@�N�������mȻ�@ʾ�ă�(n��i)�����ޣ�����Ҳ�����@ʾ��(sh��)�ֺׂ͎�(g��)Ӣ����ĸ�����@��(g��)�O(sh��)Ӌ(j��)���ѽ�(j��ng)����ˣ����҃r(ji��)���Һ���ַ�ʽҪ�͵Ķ࣬���˿����O(sh��)Ӌ(j��)�����ijɱ����ڴ��O(sh��)Ӌ(j��)���x��LED��(sh��)�a���@ʾ�� ������������Һ���@ʾ��LCD�@ʾ�ضȡ��@ʾ��Һ���ַ�ʽ��������ܛ���_(d��)���ܺõĿ��ƣ�Ӳ������(f��)�s��Һ���ַ��@ʾ�������@ʾ���S���ă�(n��i)�ݣ�����Һ���ַ�ʽ�r(ji��)���F�� ��(du��)�ڷ���һ��ԓ�����ɱ��������@ʾ�ض����_��Ŀ����ҹ�gҲ�ܿ�Ҋ(ji��n)�����ĘO�ͣ��@ʾ�(q��)��(d��ng)����ľ���(xi��)Ҳ����(du��)��(ji��n)�Σ��@�N�@ʾ��ʽ�õ��V����(y��ng)�á�����ĵط��ǒ����@ʾ��ʽ��ʹ��(sh��)�a������(g��)�c(di��n)������˕�(hu��)���W�q���������۵�ҕ�X(ju��)�����r(sh��)�g��20MS����(d��ng)��(sh��)�a�ܒ�������С���@��(g��)�r(sh��)�g�r(sh��)���ی����X(ju��)�����W�q����˿���ͨ�^(gu��)��������l�ʁ�(l��i)�����W�q�С� ��(du��)�ڷ�������Һ���w�@ʾ�������@ʾ�ַ���(y��u)�����������@ʾ��(sh��)��߀���@ʾ�ַ������D�εă�(y��u)�c(di��n)���@��LED��(sh��)�a�ܟo(w��)���ȔM�ġ�����Һ���@ʾģ�K�r(ji��)���F���(q��)��(d��ng)�����(f��)�s���ĺ�(ji��n)�Ό�(sh��)�õ�ԭ�t���]����ϵ�y(t��ng)���÷���һ��
2.4�{(di��o)�ٷ�ʽ ����һ������׃�����{(di��o)��(ji��)��ʽ���\(y��n)��늴ŸБ�(y��ng)ԭ�팢220V늉�ͨ�^(gu��)��Ȧ��������ͬ��늉��������L(f��ng)��늙C(j��)�ӵ���ͬ늉�ֵ�ľ�Ȧ�Ͽɿ���늙C(j��)���D(zhu��n)�٣��Ķ������L(f��ng)���L(f��ng)����С�� ���������������O���(q��)��(d��ng)PWM�M(j��n)�п��ơ� ��(du��)�ڷ���һ�����ڲ���׃������׃늉��{(di��o)��(ji��)�����L(f��ng)�ټ�(j��)�e���ƣ������m��(y��ng)���Ի�Ҫ������׃���^(gu��)���Е�(hu��)�Гp�İl(f��)�ᣬЧ�ʲ��ߣ��l(f��)���в���ȫ���ء� ��(du��)�ڷ�������PWM��һ��(g��)��(y��u)�c(di��n)�Ǐ�̎����������ϵ�y(t��ng)��̖(h��o)���ǔ�(sh��)����ʽ�ģ��o(w��)���M(j��n)�Д�(sh��)ģ�D(zhu��n)�Q����̖(h��o)���֞锵(sh��)����ʽ�Ɍ���Ӱ푽�����С����ֻ���ڏ�(qi��ng)�����Ԍ�߉1��׃?y��u)�߉�?��?q��)�߉�?��׃?y��u)�߉�?�r(sh��)��Ҳ���܌�(du��)��(sh��)����̖(h��o)�a(ch��n)��Ӱ푡���(du��)���ֿ�����������(qi��ng)��PWM����(du��)��ģ�M���Ƶ�����һ��(g��)��(y��u)�c(di��n)�������@Ҳ����ijЩ�r(sh��)��?q��)�PWM����ͨ�ŵ���Ҫԭ��ģ�M��̖(h��o)�D(zhu��n)��PWM���ԘO������L(zh��ng)ͨ�ž��x���ʱ�ϵ�y(t��ng)���÷�������
��3�� ϵ�y(t��ng)Ӳ���M��
3.1 ϵ�y(t��ng)�Y(ji��)��(g��u)
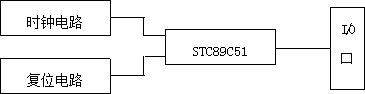
��ϵ�y(t��ng)�ɼ��ɜضȂ���������Ƭ�C(j��)��LED��(sh��)�a�ܡ����O���(q��)��(d��ng)�·��һЩ������������M�ɡ�ʹ�þ��Ѓr(ji��)����ُ(g��u)��STC89C51��Ƭ�C(j��)���̿��ƣ�ͨ�^(gu��)�ij���ɷ��㌍(sh��)�F(xi��n)ϵ�y(t��ng)����(j��)��ϵ�y(t��ng)�Ŀ�D�Y(ji��)��(g��u)���£���Ҋ(ji��n)������
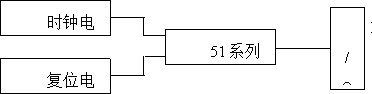
3.2.4 STC89C51��Ƭ�C(j��)��Сϵ�y(t��ng) ��Сϵ�y(t��ng)������Ƭ�C(j��)��������ı�Ҫ���Դ���r(sh��)犡���(f��)λ�Ȳ�������ʹ��Ƭ�C(j��)ʼ�K̎���������\(y��n)�Р�B(t��i)���Դ���r(sh��)犵��·��ʹ��Ƭ�C(j��)���\(y��n)�еı�l�������Ԍ���Сϵ�y(t��ng)���鑪(y��ng)��ϵ�y(t��ng)�ĺ��IJ��֣�ͨ�^(gu��)��(du��)���M(j��n)�д惦(ch��)���U(ku��)չ��A/D�U(ku��)չ�ȣ�ʹ��Ƭ�C(j��)����^��(f��)�s�Ĺ��ܡ� STC89C51��Ƭ��(n��i)��ROM/EPROM�Ć�Ƭ�C(j��)����ˣ��@�NоƬ��(g��u)�ɵ���Сϵ�y(t��ng)��(ji��n)�Ωp�ɿ�����STC89C52��Ƭ�C(j��)��(g��u)����С��(y��ng)��ϵ�y(t��ng)�r(sh��)��ֻҪ����Ƭ�C(j��)���ϕr(sh��)��·�͏�(f��)λ�·���ɣ��Y(ji��)��(g��u)��D2-3��ʾ�����ڼ��ɶȵ����ƣ���С��(y��ng)��ϵ�y(t��ng)ֻ������һЩС�͵Ŀ��Ɔ�Ԫ��
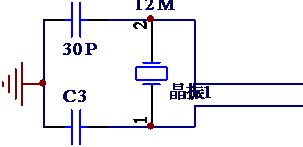
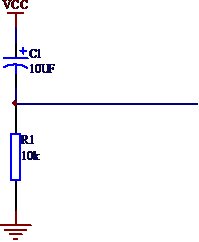
�D3-3 ��Ƭ�C(j��)��Сϵ�y(t��ng)ԭ����D 1. �r(sh��)��· STC89C51��Ƭ�C(j��)�ĕr(sh��)���̖(h��o)ͨ���ЃɷN��ʽ�a(ch��n)����һ�ǃ�(n��i)���r(sh��)犷�ʽ�������ⲿ�r(sh��)犷�ʽ����(n��i)���r(sh��)犷�ʽ��D2-4��ʾ����STC89C51��Ƭ�C(j��)��(n��i)����һ��ʎ�·��ֻҪ�چ�Ƭ�C(j��)��XTAL1(18)��XTAL2(19)���_���ʯӢ���w(��(ji��n)�Q(ch��ng)����)���͘�(g��u)�����Լ���ʎ�����چ�Ƭ�C(j��)��(n��i)���a(ch��n)���r(sh��)��}�_��̖(h��o)���D�����C1��C2�������Ƿ�(w��n)���l�ʺͿ����������ֵ��5~30pF������ֵ��30pF������CYS����ʎ�l�ʷ�����1.2~12MHz�g�x����ֵ��12MHz��6MHz�� �D3-4 STC89C51��(n��i)���r(sh��)��· 2. ��(f��)λ�· ��(d��ng)��STC89C51��Ƭ�C(j��)��RST���_������ƽ������2��(g��)�C(j��)�����ڕr(sh��)����Ƭ�C(j��)��(n��i)���͈�(zh��)�Џ�(f��)λ����(��ԓ���_���m(x��)���ָ��ƽ����Ƭ�C(j��)��̎��ѭ�h(hu��n)��(f��)λ��B(t��i))�� ��(f��)λ�·ͨ����������Ԅ�(d��ng)��(f��)λ�Ͱ��o��(f��)λ�ɷN��ʽ�� �(ji��n)�ε�����Ԅ�(d��ng)��(f��)λ�·������Ԅ�(d��ng)��(f��)λ��ͨ�^(gu��)�ⲿ��(f��)λ�·����ݳ��늁�(l��i)��(sh��)�F(xi��n)�ġ�ֻҪVcc�������r(sh��)�g�����^(gu��)1ms,�Ϳ��Ԍ�(sh��)�F(xi��n)�Ԅ�(d��ng)��늏�(f��)λ�� ������늏�(f��)λ�⣬�Еr(sh��)߀��Ҫ���I�ք�(d��ng)��(f��)λ�����O(sh��)Ӌ(j��)�����õİ��I�ք�(d��ng)��(f��)λ�����I�ք�(d��ng)��(f��)λ���ƽ��ʽ���}�_��ʽ�ɷN�������ƽ��(f��)λ��ͨ�^(gu��)RST(9)���c�ԴVcc��ͨ����(sh��)�F(xi��n)�ġ����I�ք�(d��ng)��(f��)λ�·Ҋ(ji��n)�D2-5���r(sh��)��l����11.0592MHZ�r(sh��)Cȡ10uF,Rȡ10k���� �D3-5 STC89C51��(f��)λ�·
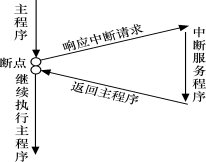
3.2.5 STC89C51�Д༼�g(sh��)���� �Д༼�g(sh��)��Ҫ���ڌ�(sh��)�r(sh��)�O(ji��n)�y(c��)�c���ƣ�Ҫ���Ƭ�C(j��)�ܼ��r(sh��)��푑�(y��ng)�Д�Ո(q��ng)��Դ����ķ���(w��)Ո(q��ng)����������푑�(y��ng)�����r(sh��)̎�����@����Ƭ��(n��i)���Д�ϵ�y(t��ng)��(l��i)��(sh��)�F(xi��n)�ġ���(d��ng)�Д�Ո(q��ng)��Դ�l(f��)���Д�Ո(q��ng)��r(sh��)������Д�Ո(q��ng)�����S����Ƭ�C(j��)���r(sh��)��ֹ��(d��ng)ǰ���ڈ�(zh��)�е��������D(zhu��n)���Д����(w��)̎������̎���Д����(w��)Ո(q��ng)���Д����(w��)̎������̎�����Д����(w��)Ո(q��ng)����ٻص�ԭ��(l��i)����ֹ�ij���֮̎�����c(di��n)�����^�m(x��)��(zh��)�б��Д�������� �D3-6������(g��)�Д�푑�(y��ng)��̎���^(gu��)�̡�
�D3-6 �Д�푑�(y��ng)��̎���^(gu��)�� �����Ƭ�C(j��)�](m��i)���Д�ϵ�y(t��ng)����Ƭ�C(j��)�Ĵ����r(sh��)�g���ܕ�(hu��)���M(f��i)�ڲ�ԃ�Ƿ��з���(w��)Ո(q��ng)��l(f��)���Ķ��r(sh��)��ԃ�����ϡ������Д༼�g(sh��)��ȫ�����ˆ�Ƭ�C(j��)�ڲ�ԃ��ʽ�еĵȴ��F(xi��n)��������ˆ�Ƭ�C(j��)�Ĺ���Ч�ʺ͌�(sh��)�r(sh��)�ԡ�
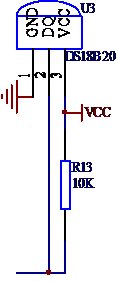
3.3 DS18B20�ضȲɼ��· DS18B20������(gu��)DALLAS�댧(d��o)�w������˾�Ƴ��Ćο�����(sh��)�ֻ����ܼ��ɜضȂ��������ο���(1-Wire)��DALLAS��˾��һ�(xi��ng)��(zhu��n)�м��g(sh��),�����Æθ���̖(h��o)��,�Ȃ�ݔ�r(sh��)��ւ�ݔ��(sh��)��(j��),���Ҕ�(sh��)��(j��)��ݔ���p���,���й�(ji��)ʡI/O�ھ��YԴ���Y(ji��)��(g��u)��(ji��n)�Ρ��ɱ����������ڿ����U(ku��)չ�;S�o(h��)���T����(y��u)�c(di��n)��
3.3.1 DS18B20 �����c(di��n)����(n��i)����(g��u)�� ���c(di��n)���£� ��1�����ê�(d��)�صĆο����ӿڷ�ʽ����ֻ��һ����̖(h��o)���c���������B����(sh��)�F(xi��n)��(sh��)��(j��)���p��ͨ�ţ�����Ҫ�ⲿԪ���� ��2���y(c��)���Y(ji��)��ֱ��ݔ����(sh��)�֜ض���̖(h��o)���Ԇο������Ђ��ͽo��������ͬ�r(sh��)�ɂ���CRCУ�(y��n)�a�����ИO��(qi��ng)�Ŀ��ɔ_�m�e(cu��)������ ��3��֧�ֶ��c(di��n)�M�W(w��ng)���ܣ�����(g��)DS18B20���Բ�(li��n)��Ψһ���������ϣ���(sh��)�F(xi��n)�M�W(w��ng)���c(di��n)�y(c��)���� ��4���m��(y��ng)늉�������3.0-5.5V������Ҫ����Դ�����Ô�(sh��)��(j��)����늣��ضȜy(c��)��������-55��~125�棬-10��~85��r(sh��)�y(c��)�����Ȟ��0.5�棻 ��5��ͨ�^(gu��)���̿Ɍ�(sh��)�F(xi��n)9~12λ�Ĕ�(sh��)��ֵ�x��(sh��)��ʽ����(du��)��(y��ng)�Ŀɷֱ�ضȷքe��0.5�棬0.25�棬0.125�棬0.0625�棬��(sh��)�F(xi��n)�߾��Ȝy(c��)�أ� ��6��ؓ(f��)�����ԡ��Դ�O�Խӷ��r(sh��)��оƬ����(hu��)��l(f��)������������������������� ���b�D����(n��i)����(g��u)�죬���D3-7��3-8��ʾ
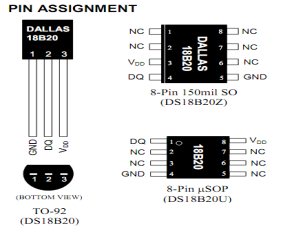
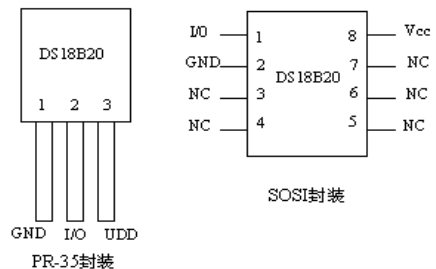
�D3-7 DS18B20�ⲿ�Y(ji��)��(g��u)��D
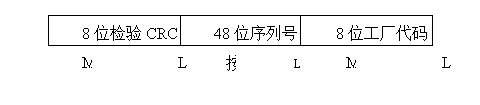
3.3.2���_���ܽ�B NC:�����_,�ҿղ�ʹ��; VDD:���x�Դ�_,�Դ늉�����3~5.5V�������ڼ����Դ�r(sh��),�����_��(y��ng)�ӵ�; I/O:��(sh��)��(j��)ݔ��/ݔ���_,©�O�_(k��i)·,���B(t��i)�¸��ƽ�� DS18B20����3�_TO-92���b��8�_SOIC��CSP���b��ʽ���D2-8��ʾ��DS18B20�ă�(n��i)���Y(ji��)��(g��u)��D������Ҫ���������Դ���ضȂ�������64λ���ROM���ο����ӿڡ�������g��(sh��)��(j��)�ĸ��ٕ���������(n��i)����{ʽRAM�����惦(ch��)�c����߉�����ڴ惦(ch��)�Ñ��O(sh��)���Ĝض�������ֵ��TH��TL�|�l(f��)�����Y(ji��)��(g��u)�Ĵ�����8λѭ�h(hu��n)����У�(y��n)�a��CRC���l(f��)�����Ȱ˲��֡� �D3-9 DS18B20�ķ��b
3.3.3 DS18B20�Ĺ���ԭ�� 64λROM�ĽY(ji��)��(g��u)��D3-10��ʾ���_(k��i)ʼ8λ�Ǯa(ch��n)Ʒ�(l��i)�͵ľ�̖(h��o)��������ÿ��(g��)����Ψһ����̖(h��o)����48λ�����8λ��ǰ��56λ��CRC�z�(y��n)�a���@Ҳ�Ƕ���(g��)DS18B20�ɲ��Æξ��M(j��n)��ͨ�ŵ�ԭ����ʧ�ԜضȈ�(b��o)���|�l(f��)��TH��TL������ͨ�^(gu��)���̌�(xi��)���Ñ��(b��o)�����¾���(sh��)��(j��)�� DS18B20�ضȂ������ă�(n��i)���惦(ch��)��߀����һ��(g��)���ٕ���RAM��һ��(g��)����ʧ�ԵĿ�늲�����EEPROM�� ���ٕ���RAM�ĽY(ji��)��(g��u)λ9�ֹ�(ji��)�Ĵ惦(ch��)�����Y(ji��)��(g��u)��D2-12��ʾ��ǰ�ɂ�(g��)�ֹ�(ji��)�����y(c��)�Üضȵ���Ϣ��3��4�ֹ�(ji��)��TH��TL�Ŀ�ؐ������ʧ�ģ�ÿ����늏�(f��)λ�r(sh��)��ˢ�¡���5�ֹ�(ji��)�����üĴ��������(n��i)�����ڴ_���ض�ֵ�Ĕ�(sh��)���D(zhu��n)�Q�l�ʣ�DS18B20�����r(sh��)���˼Ĵ����еķֱ��ʌ��ض��D(zhu��n)�Q������(y��ng)���ȵĔ�(sh��)ֵ��ԓ�ֹ�(ji��)��λ�Ķ��x��D2-13�����5λһֱ��1��TM�ǜy(c��)ԇģʽλ�������O(sh��)��DS18B20�ڹ���ģʽ߀���ڙz�y(c��)ģʽ����DS18B20���S�r(sh��)��ԓλ���O(sh��)�Þ�0���Ñ���Ҫȥ�Ą�(d��ng)��R1��R2�Q���ض��D(zhu��n)�Q�ľ���λ��(sh��)�����Á�(l��i)�O(sh��)�÷ֱ��ʣ� ��Ƭ�C(j��)����ͨ�^(gu��)�ξ��ӿ��x��ԓ��(sh��)��(j��)���Ĕ�(sh��)��(j��)�r(sh��)��λ��ǰ����λ�ں�(sh��)��(j��)��ʽ��0.0625��/LSB��ʽ��ʾ�� ��3-1�Dz��֜ض�ֵ��(du��)��(y��ng)�Ķ��M(j��n)�Ɯضȱ�ʾ��(sh��)��(j��)�� ��3-1 DS18B20�ض��c��ʾֵ��(du��)��(y��ng)��
DS18B20��ɜض��D(zhu��n)�Q�Ͱќy(c��)�õĜض�ֵ�cRAM�е�TH��TL�ֹ�(ji��)��(n��i)��(du��)�գ���T>TH��T<TL���t��ԓ������(n��i)�Ĉ�(b��o)����(bi��o)־λ��λ������(du��)���C(j��)�l(f��)���Ĉ�(b��o)��������������푑�(y��ng)����ˣ������ö���(g��)DS18B20ͬ�r(sh��)�y(c��)�ÜضȲ��M(j��n)�Ј�(b��o)�������� ��64λROM�������Ч�ֹ�(ji��)�д惦(ch��)��ѭ�h(hu��n)�����z�(y��n)�a��CRC�������C(j��)����(j��)ROM��ǰ56λ��(l��i)Ӌ(j��)��CRCֵ�����c����DS18B20��CRCֵ�����^�����Д����C(j��)�յ���ROM��(sh��)��(j��)�Ƿ����_�� �P(gu��n)��DS18B20�Ĺ���ԭ���@��Ͳ��ٶ��f(shu��)���и��dȤ�Ŀ��Բ�����P(gu��n)�փ�(c��)�� DS18B20�ľ���ָ�� DS18B20��ָ���У��xROM��33H����ƥ��ROM��55H�������^(gu��)ROM��CCH��������ROM��F0H������(b��o)��������ECH������(w��n)���D(zhu��n)�Q��44H�����ȕ�������BEH������(xi��)��������4EH������(f��)�ƕ�������48H�������{(di��o)E2PROM��B8H�����x��늷�ʽ��B4H�����P(gu��n)���@Щָ��@��Ҳ����һһ��B��ֻ�ѱ��O(sh��)Ӌ(j��)�õ����÷��f(shu��)һ�¡� CCH-���^(gu��)ROMָ�����64λROM��ַ��ֱ����DS18B20�l(f��)�ض�׃�Q����m����һ��(g��)�ęC(j��)������ 44H-�ض��D(zhu��n)�Qָ�����(d��ng)DS18B20�M(j��n)�Мض��D(zhu��n)�Q��12λ�D(zhu��n)�Q�r(sh��)���L(zh��ng)��750ms��9λ93.75ms�����Y(ji��)�������(n��i)��9�ֹ�(ji��)��RAM�С� BEH-�x������ָ��x��(n��i)��RAM��9�ֹ�(ji��)�ĜضȔ�(sh��)��(j��)�� ��D2-14��ʾ����DS18B20���·�еĽӰl(f��)�����O(sh��)Ӌ(j��)���õ��džΪ�(d��)�Դ��늷�ʽ�����挢��B�乤���r(sh��)���й����r(sh��)��D���Ժ������֪��ԓ�@�ӿ���DS18B20�� �D3-11 DS18B20�Ĺ����·
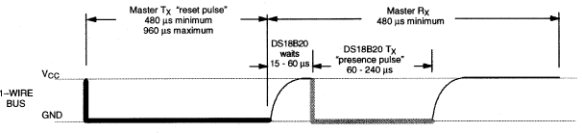
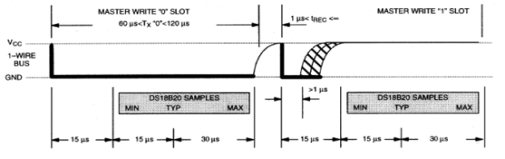
3.3.3 DS18B20�Ĺ����r(sh��)�� ��ʼ���r(sh��)��(d��ng)���C(j��)���ο���P30��߉������߉�͕r(sh��)��������(d��ng)һ��(g��)��(xi��)�r(sh��)϶�����еČ�(xi��)�r(sh��)϶�����60~120us��ɣ�����ÿ��(g��)ѭ�h(hu��n)֮�g������Ҫ1us�Ļ֏�(f��)�r(sh��)�g����(xi��)0�͌�(xi��)1�r(sh��)϶��D��ʾ���ڌ�(xi��)0�r(sh��)϶���g��������������(g��)�r(sh��)϶�Ќ��������ͣ�����(xi��)1�r(sh��)϶���g�����������������ͣ�Ȼ���ڕr(sh��)϶��ʼ��15us֮ጷſ������r(sh��)��D��D3-15��ʾ�� �D3-15 ��ʼ���r(sh��)��D ���w���E���£� ��1������(sh��)��(j��)���ø��ƽ1�� ��2���ӕr(sh��)���r(sh��)�g��(y��ng)�M����Щ���� ��3����(sh��)��(j��)���������ƽ0�� ��4���ӕr(sh��)750 ��s(ԓ����������480��960��s)�� ��5����(sh��)��(j��)�����ø��ƽ1�� ��6���ӕr(sh��)�ȴ��������ʼ���ɹ��t��15��60ms��(n��i)�a(ch��n)��һ��(g��)��DS18B20���صĵ��ƽ0����(j��)ԓ��B(t��i)���Դ_�����Ĵ��ڡ����Ǒ�(y��ng)ע�⣬���ܟo(w��)�صȴ�����Ȼ��(hu��)ʹ�����M(j��n)����ѭ�h(hu��n)������Ҫ�M(j��n)�г��r(sh��)�Дࡣ��CPU�x����(sh��)��(j��)���ϵĵ��ƽ0��߀Ҫ�M(j��n)���ӕr(sh��)�����ӕr(sh��)�ĕr(sh��)�g�İl(f��)�����ƽ���𣨵�5�����ĕr(sh��)�g��������Ҫ480��s�� ��7������(sh��)��(j��)���ٴ����ø��ƽ1��Y(ji��)���� 1.��(sh��)��(j��)�r(sh��)�� ��(d��ng)���C(j��)���ο���P30��߉������߉�͕r(sh��)��������(d��ng)һ��(g��)��(xi��)�r(sh��)϶�����еČ�(xi��)�r(sh��)϶�����60~120us��ɣ�����ÿ��(g��)ѭ�h(hu��n)֮�g������Ҫ1us�Ļ֏�(f��)�r(sh��)�g����(xi��)0�͌�(xi��)1�r(sh��)϶��D��ʾ���ڌ�(xi��)0�r(sh��)϶���g��������������(g��)�r(sh��)϶�Ќ��������ͣ�����(xi��)1�r(sh��)϶���g�����������������ͣ�Ȼ���ڕr(sh��)϶��ʼ��15us֮ጷſ������r(sh��)��DҊ(ji��n)�D3-16��ʾ��
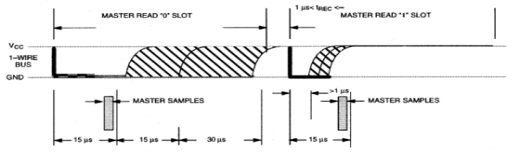
�D3-16 ��(xi��)��(sh��)��(j��)�r(sh��)��D ���w���E���£� ��1����(sh��)��(j��)�����õ��ƽ0�� ��2���ӕr(sh��)�_���r(sh��)�g��15��s�����ĵ�λ����λ�����l(f��)�͔�(sh��)��(j��)��һ��ֻ�l(f��)��һλ���� ��3���ӕr(sh��)�r(sh��)�g��45��s�� ��4������(sh��)��(j��)���������ƽ1�� ��5���؏�(f��)��1������5�����E��ֱ���l(f��)��������(g��)�ֹ�(ji��)�� ��6�����(sh��)��(j��)�����ߵ�1�� 2.�x��(sh��)��(j��)�r(sh��)�� DS18B20�����H�����C(j��)�l(f��)���x�r(sh��)϶�r(sh��)���������C(j��)��ݔ��(sh��)��(j��)�����������C(j��)�l(f��)���x��(sh��)��(j��)�������R�Ϯa(ch��n)���x�r(sh��)϶���Ա�DS18B20�܉��ݔ��(sh��)��(j��)�����е��x�r(sh��)϶������Ҫ60us�����ڃɴΪ�(d��)�����x�r(sh��)϶֮�g��������Ҫ1us�Ļ֏�(f��)�r(sh��)�g��ÿ��(g��)�x�r(sh��)϶�������C(j��)�l(f��)���������Ϳ���1us�������C(j��)�l(f��)���x�r(sh��)϶֮��DS18B20�������_(k��i)ʼ�ڿ����ϰl(f��)��0��1����DS18B20�l(f��)��1���t���ֿ�������ƽ�����l(f��)�͞�0���t���Ϳ�����(d��ng)�l(f��)��0�r(sh��)��DS18B20��ԓ�r(sh��)϶�Y(ji��)����ጷſ�������������茢�������������ƽ��B(t��i)��DS18B20�l(f��)���Ĕ�(sh��)��(j��)������ʼ�r(sh��)϶֮����Ч�r(sh��)�g��15us��������C(j��)���x�r(sh��)϶���g�����ጷſ����������ڕr(sh��)϶��ʼ���15us֮��(n��i)�ɘӿ����Ġ�B(t��i)���r(sh��)��DҊ(ji��n)�D3-17��ʾ��
�D3-17 �x��(sh��)��(j��)�r(sh��)��D ���w���E����: ��1������(sh��)��(j��)�����ߵ�1�� ��2���ӕr(sh��)2��s�� ��3������(sh��)��(j��)�����͵�0�� ��4���ӕr(sh��)6��s�� ��5������(sh��)��(j��)�����ߵ�1�� ��6���ӕr(sh��)4��s�� ��7���x��(sh��)��(j��)���Ġ�B(t��i)�õ�һ��(g��)��B(t��i)λ�����M(j��n)�Д�(sh��)��(j��)̎���� ��8���ӕr(sh��)6��s�� ��9���؏�(f��)��1������7�����E��ֱ���xȡ��һ��(g��)��(sh��)��(j��)��
3.4 ��(sh��)�a���(q��)��(d��ng)�@ʾ�·
3.4.1 ��(sh��)�a���(q��)��(d��ng)�· ���·���@ʾ�(q��)��(d��ng)ģ�K����74HC573оƬ��(l��i)��ɵģ�74HC573������·D �����i������ÿ��(g��)�i�������Ъ�(d��)����D ��ݔ�룬�Լ��m���������đ�(y��ng)�õ����B(t��i)ݔ���������i��������һ��(g��)�i��ʹ�ܣ�LE���˺�һ��(g��)ݔ��ʹ�ܣ�OE���ˡ�
������(d��ng)LE��ߕr(sh��)����(sh��)��(j��)��Dnݔ�뵽�i�������ڴ˗l���£��i�����M(j��n)����ģʽ��Ҳ�����f(shu��)���i������ݔ����B(t��i)����(hu��)�S����(du��)��(y��ng)��Dݔ��ÿ�ε�׃������׃����(d��ng)LE��͕r(sh��)���i�������惦(ch��)Dݔ���ϵ���Ϣһ�ξ;w�r(sh��)�g��ֱ��LE���½���(l��i)�R��
������(d��ng)OE��͕r(sh��)��8��(g��)�i�����ă�(n��i)�ݿɱ�����ݔ������(d��ng)OE��ߕr(sh��)��ݔ���M(j��n)�����B(t��i)��OE�˵IJ�������(hu��)Ӱ��i�����Ġ�B(t��i)��
74HC573���ԣ� ��1��ݔ��ݔ���ֲ���оƬ���b�ăɂ�(c��)����̎�����ṩ��(ji��n)��Ľӿ� ��2����������������Ӌ(j��)��C(j��)��ݔ��ݔ���� ��3�����B(t��i)����ݔ�������������đ�(y��ng)�� ��4���������B(t��i)ݔ��ʹ�ܶ� ��5��߉�����c74HC563��74HC373��ͬ ��6����ѭJEDEC��(bi��o)��(zh��n)no.7A ��7��ESD���o(h��)
3.4.2 ��(sh��)�a���@ʾ�· ���·���@ʾģ�K��Ҫ��һ��(g��)4λһ�w��7��LED��(sh��)�a�ܘ�(g��u)�ɣ������@ʾ�y(c��)�����Ĝضȼ���(d��ng)ǰ�ęnλ������һ��(g��)��ꎘO�Ĕ�(sh��)�a�ܣ�ÿһλ��(sh��)�a�ܵ�a,b,c,d,e,f,g��dp�˶������B����һ�����ڽ��Ն�Ƭ�C(j��)��P0�ڮa(ch��n)�����@ʾ�δa��S1��S2��S3��S4���_�˞���λ�x�ˣ����ڽ��Ն�Ƭ�C(j��)��P2�ڮa(ch��n)����λ�x�a����ϵ�y(t��ng)���Ä�(d��ng)�B(t��i)���跽ʽ�����跽ʽ������ӿ��·�����Д�(sh��)�a�ܵ�8��(g��)�Ȅ���a~g��dpͬ�����B��һ�𣬶�ÿһ��(g��)��(sh��)�a�ܵĹ����OCOM���Ԫ�(d��)������I/O�����ơ�CUP���ֶ�ݔ�����ͳ����ʹa�r(sh��)�����Д�(sh��)�a�ܽ��յ���ͬ�����ʹa�����������Ă�(g��)��(sh��)�a�������tȡ�Q��COM�ˡ�COM���c��Ƭ�C(j��)��I/O�ӿ����B�ӣ��Ɇ�Ƭ�C(j��)ݔ��λλ�x�a��I/O�ӿڣ����ƺΕr(sh��)��һλ��(sh��)�a�ܱ��c(di��n)������݆���c(di��n)����(sh��)�a�ܵ�λ�����^(gu��)���У�ÿλ��(sh��)�a�ܵ��c(di��n)��?x��)r�g�O��̕����������˵�ҕ�X(ju��)�����F(xi��n)�o�˵�ӡ�����һ�M��(w��n)���@ʾ�Ĕ�(sh��)�a����(d��ng)�B(t��i)��ʽ�ă�(y��u)�c(di��n)��ʮ�����@�ģ������ʡ���ڄ�(d��ng)�B(t��i)�����^(gu��)���У��κΕr(sh��)��ֻ��һ��(g��)��(sh��)�a����̎�ڹ�����B(t��i)�ġ����wԭ��D��D3-18��ʾ 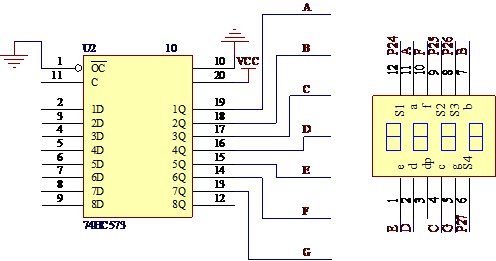 �D3-18 ��(sh��)�a���@ʾ�·
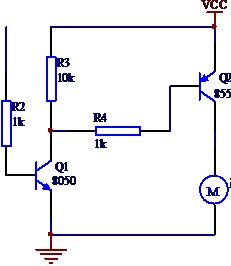
3.5 �L(f��ng)���(q��)��(d��ng)�· �L(f��ng)�ȵ��(q��)��(d��ng)���õ��ǃɂ�(g��)���O�ܣ�����(j��)�܌���̖(h��o)�Ŵ�Ȼ���ݔ?sh��)��L(f��ng)���D��ԓģ�K�·�� �D3-19 �L(f��ng)���(q��)��(d��ng)ģ�K ���O��������Ŵ�������������(g��)�O���քe������늘OC�����OB���l(f��)��OE���ֳ�NPN��PNP�ɷN���҂��H��NPN���O�ܵĹ��l(f��)��O�Ŵ��·������(l��i)�f(shu��)��һ�����O�ܷŴ��·�Ļ���ԭ���� ��1������Ŵ� ����ķ����H��(du��)��NPN�����O�ܡ����ψD��ʾ���҂��яĻ��OB�����l(f��)��OE������������O���Ib���яļ�늘OC�����l(f��)��OE�����������늘O��� Ic���@�ɂ�(g��)����ķ����������l(f��)��O�ģ����l(f��)��OE�Ͼ�����һ��(g��)���^��(l��i)��ʾ����ķ������O�ܵķŴ����þ��ǣ���늘O����ܻ��O����Ŀ��ƣ����O(sh��)�Դ �܉��ṩ�o��늘O����������Ԓ�������һ��O�����С��׃������(hu��)����늘O����ܴ��׃������׃���M��һ���ı����P(gu��n)ϵ����늘O�����׃�����ǻ��O���׃ �����Ħ±��������׃�����Ŵ��˦±��������҂��Ѧ½������O�ܵķŴ�(sh��)����һ���h(yu��n)����1�������ʮ���װ٣�������҂���һ��(g��)׃����С��̖(h��o)�ӵ����O���l(f��)�� �O֮�g���@�͕�(hu��)������O���Ib��׃����Ib��׃�����Ŵ��(d��o)����Ic�ܴ��׃���������늘O���Ic�����^(gu��)һ��(g��)���R�ģ���ô����(j��)늉�Ӌ(j��)�㹫ʽ U=R*I ������ã��@�����늉��͕�(hu��)�l(f��)���ܴ��׃�����҂����@��(g��)����ϵ�늉�ȡ����(l��i)���͵õ��˷Ŵ���늉���̖(h��o)�ˡ� ��2��ƫ���· ���O���ڌ�(sh��)�H�ķŴ��·��ʹ�Õr(sh��)��߀��Ҫ�Ӻ��m��ƫ���·���@�Ўׂ�(g��)ԭ���������������O��BE�Y(ji��)�ķǾ��ԣ��ஔ(d��ng)��һ��(g��)���O�ܣ������O��������ݔ��늉� ��һ���̶Ⱥ���ܮa(ch��n)������(du��)�ڹ�ܣ���ȡ0.7V������(d��ng)���O�c�l(f��)��O֮�g��늉�С��0.7V�r(sh��)�����O����Ϳ����J(r��n)����0������(sh��)�H��Ҫ�Ŵ����̖(h��o)�����h(yu��n)�� 0.7VҪС���������ƫ�õ�Ԓ���@ôС����̖(h��o)�Ͳ�����������O����ĸ�׃����?y��n)�С�?.7V�r(sh��)�����O�������0��������҂����������O�ܵĻ��O�ϼ���һ ��(g��)���m�����������ƫ��������ψD���ǂ�(g��)���Rb�����Á�(l��i)�ṩ�@��(g��)����ģ����������������Oƫ����裩����ô��(d��ng)һ��(g��)С��̖(h��o)���@��(g��)ƫ������B����һ��r(sh��)��С ��̖(h��o)�͕�(hu��)��(d��o)�»��O�����׃���������O�����׃�����͕�(hu��)���Ŵ��ڼ�늘O��ݔ������һ��(g��)ԭ�����ݔ����̖(h��o)������Ҫ������](m��i)�м�ƫ�ã���ôֻ�Ќ�(du��)��Щ���ӵ� ��̖(h��o)�Ŵ���(du��)�pС����̖(h��o)�o(w��)Ч����?y��n)�](m��i)��ƫ�Õr(sh��)��늘O�����0�������ٜpС�ˣ���������ƫ�ã�������늘O��һ�����������(d��ng)ݔ��Ļ��O���׃С�r(sh��)����늘O ����Ϳ��ԜpС����(d��ng)ݔ��Ļ��O�������r(sh��)����늘O����������@�ӜpС����̖(h��o)���������̖(h��o)�����Ա��Ŵ��ˡ� ��3���_(k��i)�P(gu��n)���� �����f(shu��)�f(shu��)���O�ܵ����r���������ǘӵĈD����?y��n)��ܵ���?Rc�����ƣ�Rc�ǹ̶�ֵ����ô��������U/Rc������U���Դ늉�������늘O����Dz��ܟo(w��)��������ȥ�ġ���(d��ng)���O�����������ʹ��늘O����^�m(x��)���� �r(sh��)�����O�ܾ��M(j��n)����͠�B(t��i)��һ���Д����O���Ƿ�͵Ĝ�(zh��n)�t�ǣ�Ib*�¡�Ic���M(j��n)��͠�B(t��i)֮�����O�ܵļ�늘O���l(f��)��O֮�g��늉�����С����������� һ��(g��)�_(k��i)�P(gu��n)�]���ˡ��@���҂��Ϳ��������O�܁�(l��i)��(d��ng)���_(k��i)�P(gu��n)ʹ�ã���(d��ng)���O�����0�r(sh��)�����O�ܼ�늘O�����0���@�������O�ܽ�ֹ�����ஔ(d��ng)���_(k��i)�P(gu��n)���_(k��i)����(d��ng)���O����� �����������O��͕r(sh��)���ஔ(d��ng)���_(k��i)�P(gu��n)�]�ϡ�������O����Ҫ�����ڽ�ֹ��͠�B(t��i)����ô�@�ӵ����O���҂�һ����������_(k��i)�P(gu��n)�ܡ� �D3-20 ���O�����_��B
3.6 ���Iģ�K ��Ƭ�C(j��)�I�P(p��n)�Ъ�(d��)���I�P(p��n)�;��ʽ�I�P(p��n)�ɷN����(d��)���I�P(p��n)ÿһ��(g��)I/O ����ֻ��һ��(g��)���I�����I����һ�˽��Դ��ӵأ�һ��ӵأ����@�N�ӷ�������^��(ji��n)����ϵ�y(t��ng)���ӷ�(w��n)���������ʽ�I�P(p��n)ʽ�ӷ�������^��(f��)�s������ռ�õ�I/O�١�����(j��)���O(sh��)Ӌ(j��)����Ҫ�@���x���˪�(d��)��ʽ�I�P(p��n)�ӷ��� ��(d��)��ʽ�I�P(p��n)�Č�(sh��)�F(xi��n)���������Æ�Ƭ�C(j��)I/O���xȡ�ڵ��ƽ�ߵ́�(l��i)�Д��Ƿ����I���¡������_(k��i)���I��һ�˽ӵأ���һ�˽�һ��(g��)I/O �ڣ������_(k��i)ʼ�r(sh��)����I/O�����ڸ��ƽ��ƽ�r(sh��)�o(w��)�I���r(sh��)I/O�ڱ��o(h��)���ƽ����(d��ng)���I���r(sh��)����I/O ���c�ض�·��ʹI/O �ڞ���ƽ�����Iጷź�Ƭ�C(j��)��(n��i)�����������ʹI/O����Ȼ���ָ��ƽ���҂���Ҫ���ľ����ڳ����в錤��I/O�ڵ��ƽ��B(t��i)�Ϳ����˽��҂��Ƿ��а��I��(d��ng)���ˡ� ���Æ�Ƭ�C(j��)��(du��)�I�P(p��n)̎���ĕr(sh��)���漰����һ��(g��)��Ҫ���^(gu��)�̣��Ǿ����I�P(p��n)��ȥ����(d��ng)���@���f(shu��)�Ķ���(d��ng)�ǙC(j��)е�Ķ���(d��ng)���Ǯ�(d��ng)�I�P(p��n)��δ�������µ��R��^(q��)�a(ch��n)�����ƽ����(w��n)�������F(xi��n)�������҂�?c��)ڰ��I�r(sh��)ͨ�^(gu��)ע����Ա���ġ��@�N����(d��ng)һ��10~200����֮�g���@�N����(w��n)���ƽ�Ķ���(d��ng)�r(sh��)�g��(du��)���ˁ�(l��i)�f(shu��)̫���ˣ�����(du��)�ڕr(sh��)�����Ć�Ƭ�C(j��)���Ԅt�����L(zh��ng)�ġ�Ӳ��ȥ����(d��ng)�����ò����·��(du��)����(d��ng)���ּ�֮̎����ܛ��ȥ����(d��ng)����ȥ������(d��ng)�����DZܶ���(d��ng)���ֵĕr(sh��)�g�����I�P(p��n)��(w��n)�����ٌ�(du��)��̎���������@���x����ܛ��ȥ����(d��ng)����(sh��)�F(xi��n)�����Ȳ錤���I��(d��ng)�е��ƽ���F(xi��n)�r(sh��)�����ӕr(sh��)10~200�����Ա��_(k��i)����(d��ng)����(j��ng)��ֵ��20���룩���ӕr(sh��)�Y(ji��)�������xһ��I/O �ڵ�ֵ���@һ�ε�ֵ�����1 ��ʾ���ƽ�ĕr(sh��)�g����10~200 ���룬ҕ��ɔ_��̖(h��o)����(d��ng)�x����ֵ��0�r(sh��)�t��ʾ�а��I���£��{(di��o)������(y��ng)��̎������Ӳ���·��D3-21��ʾ�� �D3-21 ���Iģ�K�·�D
��4�� ϵ�y(t��ng)ܛ���O(sh��)Ӌ(j��)
4.1 ܛ����B
4.1.1 Keil C51 Keil C51������(gu��)Keil Software��˾��Ʒ��51ϵ�м��݆�Ƭ�C(j��)C�Z(y��)��ܛ���_(k��i)�l(f��)ϵ�y(t��ng)���c�R����ȣ�C�Z(y��)���ڹ����ϡ��Y(ji��)��(g��u)�ԡ����x�ԡ��ɾS�o(h��)���������@�ă�(y��u)��(sh��)������W(xu��)���á����^(gu��)�R���Z(y��)�Ժ���ʹ��C��(l��i)�_(k��i)�l(f��)���w��(hu��)������̡� Keil C51ܛ���ṩ�S���Ď�(k��)����(sh��)����(qi��ng)��ļ����_(k��i)�l(f��)�{(di��o)ԇ���ߣ�ȫWindows���档������Ҫ��һ�c(di��n)��ֻҪ��һ�¾��g�����ɵąR�����a�������w��(hu��)��Keil C51���ɵ�Ŀ��(bi��o)���aЧ�ʷdz�֮�ߣ�����(sh��)�Z(y��)�����ɵąR�����a�ܾo�����������⡣���_(k��i)�l(f��)����ܛ���r(sh��)�����w�F(xi��n)��(j��)�Z(y��)�Եă�(y��u)��(sh��)������Ԕ��(x��)��BKeil C51�_(k��i)�l(f��)ϵ�y(t��ng)�����ֹ��ܺ�ʹ�á� Keil_cܛ��������D4-1��ʾ �D4-1 Keil_cܛ������
4.1.2 Protel99SE Protel99SE��PORTEL��˾��80���ĩ�Ƴ���EDAܛ����Protel99SE�Ǒ�(y��ng)����Windows9X/2000/NT����ϵ�y(t��ng)�µ�EDA�O(sh��)Ӌ(j��)ܛ���������O(sh��)Ӌ(j��)��(k��)����ģʽ�����ԾW(w��ng)�O(sh��)Ӌ(j��)�����к�(qi��ng)�Ĕ�(sh��)��(j��)���Q�������_(k��i)���Լ�3Dģ�M���ܣ���һ��(g��)32λ���O(sh��)Ӌ(j��)ܛ������������·ԭ��D�O(sh��)Ӌ(j��)��ӡ���·���O(sh��)Ӌ(j��)�Ϳɾ���߉�����O(sh��)Ӌ(j��)�ȹ����������O(sh��)Ӌ(j��)32��(g��)��̖(h��o)�ӣ�16��(g��)�Դ--�،Ӻ�16��(g��)�C(j��)�ӹ��ӡ� Protel99SEܛ�������c(di��n)�� (1) ������30��N��ʽ��늚��B�ӾW(w��ng)�j(lu��)���� (2) ��(qi��ng)���ȫ�־����ܣ� (3) ��ԭ��D���x��һ��(j��)������PCB��ͬ�ӵ�����Ҳ�����x�У� (4) ͬ�r(sh��)�\(y��n)��ԭ��D��PCB���ڴ��_(k��i)��ԭ��D��PCB�D�g���S�p�����Ԫ���������_���W(w��ng)�j(lu��) (5) �ȿ����M(j��n)������ע�Ԫ������(bi��o)̖(h��o)����ԭ��D��PCB����Ҳ�����M(j��n)�з���ע�?zhu��n)���PCB��ԭ��D�����Ա���늚�ԭ��D��PCB���O(sh��)Ӌ(j��)�ϵ�һ���ԣ� (6) �M���(gu��)�H���O(sh��)Ӌ(j��)Ҫ������(gu��)��(bi��o)��(bi��o)�}��ݔ����GB4728��(gu��)��(bi��o)��(k��)���� * �������õĔ�(sh��)ģ��Ϸ��棨����SPICE 3f5���� (7) ֧����CUPL�Z(y��)�Ժ�ԭ��D�O(sh��)Ӌ(j��)PLD�����ɘ�(bi��o)��(zh��n)��JED���d�ļ��� * PCB���O(sh��)Ӌ(j��)32��(g��)��̖(h��o)�ӣ�16��(g��)�Դ-�،Ӻ�16��(g��)�C(j��)�ӹ��ӣ� (8) ��(qi��ng)��ġ�Ҏ(gu��)�t�(q��)��(d��ng)���O(sh��)Ӌ(j��)�h(hu��n)���������ھ��ĺ���̎�����O(sh��)Ӌ(j��)Ҏ(gu��)�t�z�飻 (9) ���ܸ��~���ܣ���♿����Ԅ�(d��ng)��䁣� (10)�ṩ�����Ĺ��I(y��)����(bi��o)��(zh��n)�·�������O(sh��)Ӌ(j��)ģ�棻 Protel99SE�Ĺ���������һ�N��(bi��o)��(zh��n)��Windows���棬��D��ʾ����������(bi��o)�}�ڡ����ˆΡ���(bi��o)��(zh��n)���ߙڡ��L�D���ߙڡ���B(t��i)�ڡ���(du��)���x���o���A(y��)�[��(du��)��λ���ư��o�������M(j��n)�̿��ư��o���A(y��)�[���ڡ���(du��)���x�������ڡ��D�ξ����ڡ� �D4-2 Prtel99SEܛ������
4.1.3 Proteus Proteus��Ŀǰ��õ�ģ�M��Ƭ�C(j��)��������Ĺ��ߣ����Է���51 ϵ�С�AVR��PIC �ȳ��õ�MCU ��������·����LCD��RAM��ROM���I�P(p��n)���R�_(d��)��LED��AD/DA������SPI ����������IIC ������ Proteus �c������Ƭ�C(j��)����ܛ����ͬ���ǣ������H�ܷ����Ƭ�C(j��)CPU �Ĺ�����r��Ҳ�ܷ����Ƭ�C(j��)����·��](m��i)�І�Ƭ�C(j��)���c�������·�Ĺ�����r������ڷ���ͳ����{(di��o)ԇ�r(sh��)���P(gu��n)�ĵIJ�����ijЩ�Z(y��)���(zh��)�Еr(sh��)��Ƭ�C(j��)�Ĵ����ʹ惦(ch��)����(n��i)�ݵĸ�׃�����ǏĹ��̵ĽǶ�ֱ�ӿ������\(y��n)�к��·�������^(gu��)�̺ͽY(ji��)������(du��)���@�ӵķ��挍(sh��)�(y��n)����ij�N���x���v���Ǐ��a(b��)�ˌ�(sh��)�(y��n)���̑�(y��ng)���gÓ��(ji��)��ì�ܺͬF(xi��n)�� �\(y��n)��proteus ��ISIS ������M(j��n)��ԓ����ܛ���������档�ڹ���ǰ��Ҫ�O(sh��)��view �ˆ��µIJ���(du��)�R��system�µ��ɫ���D�ν����С���(xi��ng)Ŀ��ͨ�^(gu��)���ߙ��е�p(�Ď�(k��)���x��Ԫ������)�����pick devices �������x���·�����Ԫ��������Ԫ�����{(di��o)��������(du��)λ�ã�Ԫ������(sh��)�O(sh��)�ã�Ԫ�����g�B��������(xi��)������source �ˆε�Definecode generation tools �ˆ������£��x������g�Ĺ��ߡ�·�����U(ku��)չ�����(xi��ng)Ŀ����source �ˆε�Add/removesource files �����£������Ƭ�C(j��)Ӳ���·�Č�(du��)��(y��ng)����ͨ�^(gu��)debug �ˆε�����(y��ng)������������·���\(y��n)����r�� - Proteus ܛ�����ṩ��Ԫ���YԴProteus ܛ�����ṩ��30 ����(g��)Ԫ����(k��)����(sh��)ǧ�NԪ����Ԫ���漰����(sh��)�ֺ�ģ�M��������ֱ���ȡ�
- Proteus ܛ�����ṩ�ăx���YԴ
��(du��)��һ��(g��)����ܛ����?q��)��?y��n)�ң��y(c��)ԇ�ăx���x���Ĕ�(sh��)�����(l��i)�ͺ��|(zh��)�����Ǻ�����(sh��)�(y��n)���Ƿ�ϸ��һ��(g��)�P(gu��n)�I���ء���Proteus ܛ�����У�������ͬ�(l��i)�x��ʹ�Ô�(sh��)���Ć�(w��n)�}��Proteus ߀�ṩ��һ��(g��)�D���@ʾ���ܣ����Ԍ���·��׃������̖(h��o)���ԈD�εķ�ʽ��(sh��)�r(sh��)���@ʾ����(l��i)���������cʾ�������Ƶ����ܸ��ࡣ - Proteus ܛ�����ṩ���{(di��o)ԇ�ֶ�
Proteus �ṩ�˱��^�S���Ĝy(c��)ԇ��̖(h��o)�����·�Ĝy(c��)ԇ���@Щ�y(c��)ԇ��̖(h��o)����ģ�M��̖(h��o)�͔�(sh��)����̖(h��o)����(du��)�چ�Ƭ�C(j��)Ӳ���·��ܛ�����{(di��o)ԇ��Proteus �ṩ�˃ɷN������һ�N��ϵ�y(t��ng)���w��(zh��)��Ч����һ�N�nj�(du��)ܛ���ķֲ��{(di��o)ԇ�Կ����w�Ĉ�(zh��)����r�� ��(du��)�ڿ��w��(zh��)��Ч�����{(di��o)ԇ������ֻ��Ҫ��(zh��)��debug �ˆ��µ�execute �ˆ��(xi��ng)��F12 ����I����(d��ng)��(zh��)�У���debug�ˆ��µ�pause animation �ˆ��(xi��ng)��pause �I��ͣϵ�y(t��ng)���\(y��n)�У�����debug �ˆ��µ�stop animation �ˆ��(xi��ng)��shift-break �M���Iֹͣϵ�y(t��ng)���\(y��n)�С����\(y��n)�з�ʽҲ�����x�ߙ��е�����(y��ng)�����M(j��n)�С� ��(du��)��ܛ���ķֲ��{(di��o)ԇ����(y��ng)�Ȉ�(zh��)��debug �ˆ��µ�start/restart debugging �ˆ��(xi��ng)����˕r(sh��)�����x��stepover ��step into �� step out �����(zh��)�г���(�����ÿ���IF10��F11 ��ctrl+F11)����(zh��)�е�Ч���džξ��(zh��)�С��M(j��n)���ӳ����(zh��)�к������ӳ����(zh��)�С��ڈ�(zh��)����start / restart debuging �������debug �ˆε�����Ҫ���F(xi��n)���������漰����ܛ���б��͆�Ƭ�C(j��)��ϵ�y(t��ng)�YԴ�ȣ��ɹ��{(di��o)ԇ�r(sh��)�����Ͳ鿴�� �D4-3 proteusܛ������
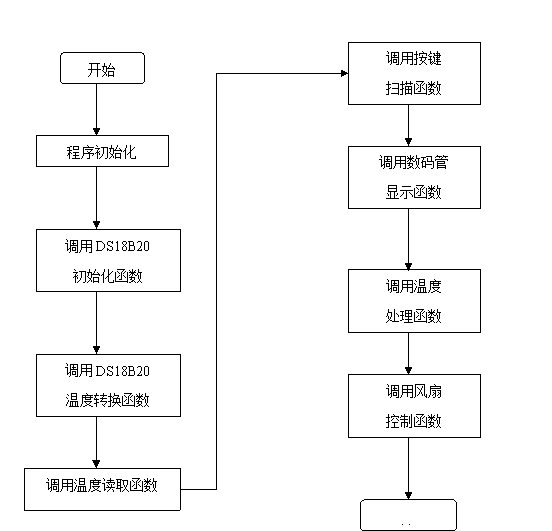
4.2 ���������̈D Ҫ��(sh��)�F(xi��n)����(j��)��(d��ng)ǰ�ضȌ�(sh��)�r(sh��)�Ŀ����L(f��ng)�ȵĠ�B(t��i)����Ҫ�ڳ����в��r(sh��)���Дஔ(d��ng)ǰ�ض�ֵ�Ƿ��^(gu��)�O(sh��)���Ą�(d��ng)���ض�ֵ���������چ�Ƭ�C(j��)�Ĺ����l�ʸ��_(d��)12MHz���ڈ�(zh��)�г���r(sh��)��������(d��ng)ǰ�ضȺ��O(sh��)����(d��ng)���ض��M(j��n)�б��^�Д࣬��(d��ng)���^(gu��)�O(sh��)���ض�ֵ�����r(sh��)���r(sh��)���D(zhu��n)ȥ��(zh��)�г���̎����Ƿ��̎���ӳ������L(f��ng)�Ȍ�(sh��)�r(sh��)���ГQ���P(gu��n)�]�����L(f��ng)�����L(f��ng)����(g��)��B(t��i)�� �@ʾ�(q��)��(d��ng)�����Բ��߶δaȡ�ø���(sh��)�a�ܑ�(y��ng)�@��(sh��)�֣���λ�����@ʾ�����������̈D��D4-4��ʾ��
�D4-4 ���������̈D
4.3 DS18B20�ӳ������̈D �Ȍ�(du��)DS18B20��ʼ�������M(j��n)��ROM������������܌�(du��)�惦(ch��)����������(sh��)��(j��)������DS18B20ÿһ��������Ҫ��ѭ��(y��n)��Ĺ����r(sh��)���ͨ�Ņf(xi��)�h�������C(j��)����DS18B20��ɜض��D(zhu��n)�Q�@һ�^(gu��)�̣�����(j��)DS18B20��ͨӍ�f(xi��)�h��횽�(j��ng)����(g��)���E��ÿһ���x��(xi��)֮ǰ��Ҫ��(du��)DS18B20�M(j��n)�Џ�(f��)λ����(f��)λ�ɹ���l(f��)��һ�lROMָ����l(f��)��RAMָ��@�Ӳ��܌�(du��)DS18B20�M(j��n)���A(y��)���IJ����� �D4-5 DS18B20�������̈D
4.4 ��(sh��)�a���@ʾ�ӳ������̈D ����?q��)��F(xi��n)�Ĺ����nj���DS18B20�xȡ�Ķ��M(j��n)�Ɯض�ֵ�D(zhu��n)�Q���߶δa��LED���@ʾ����(l��i)���@ʾ��ʽ���õ��DŽ�(d��ng)�B(t��i)����ķ�ʽ���Ƚoλ�x��̖(h��o)���ٽo���x��̖(h��o)��Ȼ���ӕr(sh��)һ�¡����w���̈D��D4-6
4.5 ���I�ӳ������̈D Ӳ���O(sh��)Ӌ(j��)�Ϟ�ͨ�^(gu��)3��(g��)���I���ɰ��I�����ӳ���KEYSCAN�ӳ����ṩܛ��֧�֡�����һ���O(sh��)���IK1���M(j��n)��ض������O(sh��)�ã��˕r(sh��)���¡��ӡ��IK2����һ�����¡��p���IK3���p1���ٰ�һ���O(sh��)���IK2���M(j��n)��ض������O(sh��)�à�B(t��i)���˕r(sh��)���¡��ӡ��IK2����һ�����¡��p���IK3���p1�����ބ�(d��ng)���ض�ֵTL�����ބ�(d��ng)���ض�ֵ���O(sh��)�÷�����10-100�z�϶ȣ��M��һ��ʹ��Ҫ���ٰ�һ���O(sh��)���IK3�˳������ޜض��O(sh��)�à�B(t��i)��
��5�� ϵ�y(t��ng)�{(di��o)ԇ
5.1 ܛӲ���{(di��o)ԇ
5.1.1 ���I�@ʾ���ֵ��{(di��o)ԇ �������(j��)�O(sh��)Ӌ(j��)����(xi��)��ϵ�y(t��ng)��������I�P(p��n)�ӿڲ���P3�ڣ���(sh��)�a���@ʾ����P0�ڿ���LED�Ĕ�a��P2�ڿ���LED��λ�a���Ķ���(sh��)�F(xi��n)�I�P(p��n)���ܼ���(sh��)�a�ܵ��@ʾ����(j��ng)�^(gu��)���g�](m��i)�г��e(cu��)�����ڷ����{(di��o)ԇ�r(sh��)����(sh��)�a���@ʾ��ֻ�ǁy�a���](m��i)�����_���@ʾ�ضȣ����I����Ҳ���`����(d��ng)�����I�r(sh��)���@ʾ��(hu��)׃���ܶ�Ρ� ��(j��ng)�^(gu��)���ҷ������l(f��)�F(xi��n)�I�P(p��n)�������](m��i)�Л](m��i)�а��I�������֣����I�ڰ����c���֕r(sh��)������(hu��)��һ���̶ȵĶ���(d��ng)���Ķ�����ʹ��Ƭ�C(j��)�����e(cu��)�`���Д࣬��(d��o)�°��I�l���A(y��)�O(sh��)�ضȕr(sh��)ʧ�`��������������������������˱���ڰ��I��������м����������֣����ڰ��I�����c���֕r(sh��)�����ӕr(sh��)�Д࣬�ԙz�y(c��)�I�P(p��n)�Ƿ���İ��»�����ȫ���֡� ��(sh��)�a�ܲ������_���@ʾ����Ҫ����?y��n)����Ԕ?sh��)�a�ܵĶδa����P0�ڂ��ͣ�����(sh��)�a���@ʾ�ֲ����˄�(d��ng)�B(t��i)����ķ�ʽ�����ڳ����Ѕs�](m��i)���O(sh��)���@ʾ�δa�ĕ���������(d��o)�®�(d��ng)P0�ڂ��Ͷδa�r(sh��)�l(f��)����y���������_�R(sh��)�e�δa����(y��ng)��ϵ�y(t��ng)�м����i�����������ڳ������O(sh��)���惦(ch��)�δa�Ŀ��g�� ���I�P(p��n)��������������(sh��)�a���@ʾ�����м����˶δa�Ĵ惦(ch��)���g��(sh��)�a���܉��������@ʾ�����IҲ�܉������_(d��)�����^�õ�Ч����
5.1.2 ������DS18B20�ضȲɼ������{(di��o)ԇ ���ڔ�(sh��)��ʽ���ɜضȂ�����DS18B20�ĸ߶ȼ��ɻ�����ܛ�����O(sh��)Ӌ(j��)���{(di��o)ԇ����(l��i)�˘O��ĺ�(ji��n)�㣬С�w�e�����ġ��߾��Ȟ����늙C(j��)�ľ��Ⱥͷ�(w��n)���ṩ�˿��ܡ�ܛ���O(sh��)Ӌ(j��)����P1.6�ڞ锵(sh��)�֜ض�ݔ��ڣ�������Ҫ��(du��)ݔ��Ĕ�(sh��)����̖(h��o)�M(j��n)��̎��������@ʾ���Ķ����˜ض��D(zhu��n)�Q����ͨ�^(gu��)ܛ���O(sh��)Ӌ(j��)����(sh��)�F(xi��n)�ˌ�(du��)�h(hu��n)���ضȵ��B�m(x��)�z�y(c��)������Ӳ��LED��(g��)��(sh��)�����ƣ�ֻ�@ʾ���A(y��)�O(sh��)�ضȵ�����(sh��)���֡� �ڜض��D(zhu��n)�Q�����У������܉����_�ęz�y(c��)���@ʾ�ضȵ�С��(sh��)λ�������аљz�y(c��)�Ĝض��c10��˺��ٰ�һ��(g��)��λ������(sh��)��(l��i)̎�������24.5׃?y��u)?45��(l��i)̎�����@�Ӟ����ľ���(xi��)����(l��i)�˷��㡣 ϵ�y(t��ng)�{(di��o)ԇ�О��(y��n)�CDS18B20�Ƿ�����ϵ�y(t��ng)���Ϲ����������Ŀ��n������סоƬ�����ɰl(f��)�F(xi��n)LED�@ʾ��ǰ��λ�ض�ҲѸ�����ߣ��(y��n)�C��DS18B20����ϵ�y(t��ng)���Ϲ���������DS18B20��3��(g��)���_��������{(di��o)ԇ�^(gu��)������ע�������(g��)���_�Č�(du��)��(y��ng)λ�ã����⌢��ӷ�����оƬ���ܹ�����������оƬ��
5.1.3 �L(f��ng)���{(di��o)���·�����{(di��o)ԇ �ڱ��O(sh��)Ӌ(j��)�У����������O���(q��)��(d��ng)ֱ��늙C(j��)��ܛ���O(sh��)����P1.0��ݔ����ͬ��PWM���Σ�ͨ�^(gu��)���O�ܵķŴ������(q��)��(d��ng)ֱ��늙C(j��)�D(zhu��n)��(d��ng)��ͨ�^(gu��)ܛ���г����O(sh��)��������(j��)��ͬ�ض�ݔ����ͬ��PWM�����Ķ��õ���ͬ��ռ�ձȿ����L(f��ng)��ֱ��늙C(j��)������?q��)��F(xi��n)��P1.0�ڵ�PWM����ݔ������(d��ng)���ضȵ����O(sh��)�Üضȕr(sh��)��늙C(j��)���D(zhu��n)��(d��ng)���Ԅ�(d��ng)ֹͣ�D(zhu��n)��(d��ng)����(d��ng)���ضȸ����O(sh��)�Üضȕr(sh��)��늙C(j��)���D(zhu��n)���������Ԅ�(d��ng)�_(k��i)ʼ�D(zhu��n)��(d��ng)�� �ڱ�ϵ�y(t��ng)���L(f��ng)��늙C(j��)���D(zhu��n)�ٿɌ�(sh��)�F(xi��n)�ɼ�(j��)�{(di��o)�١�ͨ�^(gu��)�ضȂ������z�y(c��)�Ĝض��cϵ�y(t��ng)�A(y��)�O(sh��)�ض�ֵ�ı��^����(sh��)�F(xi��n)�D(zhu��n)��׃�Q��
5.2 ϵ�y(t��ng)����
5.2.1 ϵ�y(t��ng)��(sh��)�F(xi��n)�Ĺ��� ��ϵ�y(t��ng)�܉�?q��)��F(xi��n)��Ƭ�C(j��)ϵ�y(t��ng)�z�y(c��)�h(hu��n)���ضȵ�׃����Ȼ�����(j��)�h(hu��n)���ضȺ��O(sh��)�õ��yֵ��(l��i)�����L(f��ng)��ֱ��늙C(j��)ݔ��ռ�ձȵ�׃�����Ķ��a(ch��n)����ͬ���D(zhu��n)��(d��ng)�ٶȣ���ɸ���(j��)�I�P(p��n)�{(di��o)��(ji��)��ͬ���O(sh��)�Üضȣ����ɭh(hu��n)���ض��c�O(sh��)�ÜضȵIJ�ֵ��(l��i)����늙C(j��)����(d��ng)�h(hu��n)���ضȵ����O(sh��)�Üضȕr(sh��)��늙C(j��)ֹͣ�D(zhu��n)��(d��ng)����(d��ng)�h(hu��n)���ضȸ����O(sh��)�Üضȕr(sh��)����Ƭ�C(j��)��(du��)��(y��ng)ݔ����ݔ����ͬռ�ձȵ�PWM��̖(h��o)������늙C(j��)�_(k��i)ʼ�D(zhu��n)��(d��ng)��ϵ�y(t��ng)߀�܄�(d��ng)�B(t��i)���@ʾ��(d��ng)ǰ�ضȺͮ�(d��ng)ǰ�ęnλ������ͨ�^(gu��)�I�P(p��n)�{(di��o)��(ji��)��(d��ng)ǰ���O(sh��)�Üضȡ�
5.2.2 ϵ�y(t��ng)���ܷ��� ϵ�y(t��ng)���w�����IJ��ց�(l��i)�M�ɣ��Ȱ��I�·����(sh��)�a���(q��)��(d��ng)�@ʾ�·���ضșz�y(c��)�·���L(f��ng)���(q��)��(d��ng)�·�����ȿ��V���ǜضșz�y(c��)�·��ԓ����������(g��)ϵ�y(t��ng)����Ҫ���֣�����Ҫ�z�y(c��)���h(hu��n)���ضȣ������Æ�Ƭ�C(j��)��(l��i)�Д��ضȵĸߵͣ�Ȼ��ͨ�^(gu��)��Ƭ�C(j��)����ֱ���L(f��ng)��늙C(j��)���D(zhu��n)�٣������늙C(j��)�(q��)��(d��ng)�·��ԓ������Ҫʹ������·����Ƭ�C(j��)ݔ����PWM��̖(h��o)�D(zhu��n)����ƽ��늉�ݔ��������(j��)��ͬ��PWM���εõ���ͬ��ƽ��늉����Ķ�����늙C(j��)���D(zhu��n)�٣��·���O(sh��)Ӌ(j��)�в����˃ɂ�(g��)���O�ܽM�ɏ�(f��)�Ϲ��(q��)��(d��ng)����(sh��)�F(xi��n)�^�õĿ���Ч�����ٴ��ǔ�(sh��)�a�ܵĄ�(d��ng)�B(t��i)�@ʾ�·��ԓ���ֵĹ��܌�(sh��)�F(xi��n)��(du��)�h(hu��n)���ضȺ͙nλ���@ʾ������DS18B20�ɼ��h(hu��n)���ضȣ����I��(sh��)�F(xi��n)��ͬ�O(sh��)�Üضȵ��{(di��o)������(sh��)�F(xi��n)�ˌ�(du��)�h(hu��n)���ضȺ͙nλ�ļ��r(sh��)�B�m(x��)�@ʾ��
�Y(ji��)��Փ
�����O(sh��)Ӌ(j��)��ϵ�y(t��ng)�Ԇ�Ƭ�C(j��)����ƺ��ģ��ԜضȂ�����DS18B20�z�y(c��)�h(hu��n)���ضȣ���(sh��)�F(xi��n)�˸���(j��)�h(hu��n)���ض�׃���{(di��o)��(ji��)��ͬ���L(f��ng)��늙C(j��)�D(zhu��n)�٣�LED��(sh��)�a�����B�m(x��)��(w��n)�����@ʾ�h(hu��n)���ضȺ͙nλ������ͨ�^(gu��)����(g��)��(d��)�����I�{(di��o)��(ji��)��ͬ���O(sh��)�Üضȣ��Ķ���׃�h(hu��n)���ض��c�O(sh��)�ÜضȵIJ�ֵ���M(j��n)����׃늙C(j��)�D(zhu��n)�١���(sh��)�F(xi��n)�˻��چ�Ƭ�C(j��)�Ĝؿ��L(f��ng)�ȵ��O(sh��)Ӌ(j��)��
��ϵ�y(t��ng)�O(sh��)Ӌ(j��)���ƏV�����N늄�(d��ng)�C(j��)�Ŀ���ϵ�y(t��ng)�У���(sh��)�F(xi��n)늄�(d��ng)�C(j��)���D(zhu��n)���{(di��o)��(ji��)�������a(ch��n)�����У���ϵ�y(t��ng)�����ں�(ji��n)�ε��ճ��L(f��ng)�ȵ����ܿ��ƣ��������(l��i)�������ڹ��I(y��)���a(ch��n)�У����Ը�׃��ͬ��ݔ����̖(h��o)����(sh��)�F(xi��n)��(du��)��ͬ��̖(h��o)ݔ�����늙C(j��)���D(zhu��n)�٣��M(j��n)����(sh��)�F(xi��n)���a(ch��n)�Ԅ�(d��ng)�����������ϵ�y(t��ng)�п��Ը���(j��)��ͬ��ؓ(f��)���_(d��)����ͬ��늉���̖(h��o)������늉���̖(h��o)�{(di��o)��(ji��)��ͬ�İl(f��)늙C(j��)�D(zhu��n)�٣��M(j��n)���{(di��o)��(ji��)�l(f��)�������(sh��)�F(xi��n)���ϵ�y(t��ng)���Ԅ�(d��ng)���{(di��o)��(ji��)���C��������ԓϵ�y(t��ng)���O(sh��)Ӌ(j��)���о������(hu��)���a(ch��n)�������о�����Ҫ��λ��
�x �o
���I(y��)�O(sh��)Ӌ(j��)�Y(ji��)���ˣ����@�����Ҫ���ĵظ��x��־���ώ�һֱ�ԁ�(l��i)��(du��)�҂���ָ��(d��o)�͎��������������Y���Č�(zhu��n)�I(y��)֪�R(sh��)����(y��n)֔(j��n)?sh��)Ŀ������L(f��ng)�Ď���(d��ng)�£��҂��������������@�ή��I(y��)�O(sh��)Ӌ(j��)���΄�(w��)����Փ���A�Σ����x�}�����(l��i)�n��������Փ����(xi��)�A�Σ��ώ��������ķ�������(x��)�ĵ�ָ��(d��o)���r(sh��)���P(gu��n)���Ү��I(y��)�O(sh��)Ӌ(j��)�������M(j��n)չ�������Ұ����о�����ͽ�Q�о����������S����(w��n)�}��ʹ���܉���������Փ�Ĺ��������Լ��Ĺ������Y(ji��)�្����(l��i)��
���@�ή��I(y��)�O(sh��)Ӌ(j��)�У��@����W(xu��)�õĴ�֪�R(sh��)�õ��˳�ֵđ�(y��ng)�ã���ǰ�](m��i)����ȫ���յ��y�c(di��n)�õ��˽�Q��ͬ�r(sh��)������Փ�͌�(sh��)�`���õؽY(ji��)������(l��i)�����B(y��ng)���҂���(sh��)�����ǵĿƌW(xu��)�B(t��i)�Ⱥ͇�(y��n)֔(j��n)?sh��)����L(f��ng)���M(j��n)һ��������Լ����ԌW(xu��)�������@��(du��)������ȫ̤�����(hu��)���҂���(l��i)�f(shu��)����һ��(g��)�ܴ���ի@��
�����Ҫ���x���(y��ng)�����W(xu��)Ժ�����@��҂������W(xu��)�����S���Č�(zhu��n)�I(y��)֪�R(sh��)�Ͷ������������W(xu��)�����������̎�¡��@������������һ�P���ؔ(c��i)�����ڴˣ�����?q��)WУ��ÿһλ�ώ����������\(ch��ng)���x�⣡��ףԸ���(y��ng)�����W(xu��)Ժ��������ӵ��x�ͣ�
�����
���1��protelԭ��D
���2��proteus����D
������Word��ʽ�ęn51�����d��ַ����Դ�a����
| 



 [��(f��)��朽�]
[��(f��)��朽�]

 ����TQQ:125739409;���g(sh��)����QQȺ281945664
����TQQ:125739409;���g(sh��)����QQȺ281945664
















 QQ���Ѻ�Ⱥ
QQ���Ѻ�Ⱥ QQ���g
QQ���g �vӍ��
�vӍ�� �vӍ����
�vӍ���� �ղ�
�ղ� ����
���� �
� ��
��