|
《智能電動小車》
摘要:本課題組設計制作了一款具有智能判斷功能的小車,功能強大。小車具有以下幾個功能:自動避障功能;尋跡功能(按路面的黑色軌道行駛);趨光功能(尋找前方的點光源并行駛到位);檢測路面所放置的鐵片的個數的功能;計算并顯示所走的路程和行走的時間,并可發聲發光。作品可以作為高級智能玩具,也可以作為大學生學習嵌入式控制的強有力的應用實例。
作品以兩電動機為主驅動,通過各類傳感器件來采集各類信息,送入主控單元AT89S52單片機,處理數據后完成相應動作,以達到自身控制。電機驅動電路采用高電壓,高電流,四通道驅動集成芯片L293D。其中避障采用紅外線收發來完成;鐵片檢測部分采用電感式接近開關LJ18A3-8-Z/BX檢測;黑帶檢測采用紅外線接收二極管完成;趨光部分通過3路光敏二極管對光源信號的采集,再經過ADC0809轉化為數字信號送單片機處理判別方向。由控制單元處理數據后完成相應動作,實現了無人控制即可完成一系列動作,相當于簡易機器人。
關鍵字:智能控制 蔽障 紅外線收發 尋跡行駛 趨光行駛
1.總體方案論證與比較
方案一:采用各類數字電路來組成小車的控制系統,對外圍避障信號,黑帶檢測信號,鐵片檢測信號,各路趨光信號進行處理。本方案電路復雜,靈活性不高,效率低,不利于小車智能化的擴展,對各路信號處理比較困難。
方案二:采用ATM89S52單片機來作為整機的控制單元。紅外線探頭采用市面上通用的發射管與及接收頭,經過單片機調制后發射。鐵片檢測采用電感式接近開關LJ18A3-8-Z/BX檢測,黑帶采用光敏二極管對光源信號采集,再經過ADC0809轉化為數字信號送到單片機系統處理。此系統比較靈活,采用軟件方法來解決復雜的硬件電路部分,使系統硬件簡潔化,各類功能易于實現,能很好地滿足題目的要求。
比較以上兩種方案的優缺點,方案二簡潔、靈活、可擴展性好,能達到題目的設計要求,因此采用方案二來實現。方案二的基本原理如圖1所示。 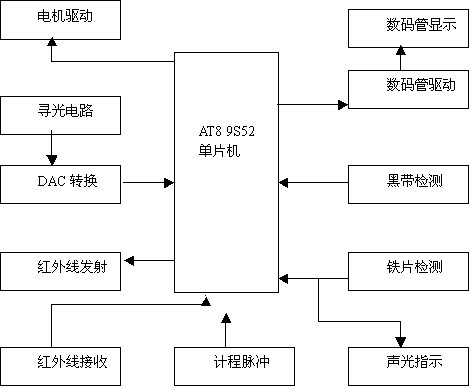 圖1 智能車運行基本原理圖框圖
避障部分采用紅外線發射和接受原理。鐵片檢測采用電感式接近開關LJ18A3-8-Z/BX檢測,產生的高低電平信號經過處理后,完成相應的記錄數目,驅動蜂鳴器發聲。黑帶尋跡依*安裝在車底部左右兩個光敏二極管對管來對地面反射光感應。尋光設計在小車前端安裝3路(左、中、右)光敏電阻對光源信號采集,模擬信號經過ADC0809轉化為數字信號送到MCU處理。記程通過在車輪上安裝小磁塊,再用霍爾管感應產生計數脈沖。記時由軟件實現,顯示采用普通七段LED。此系統比較靈活,采用軟件方法來解決復雜的硬件電路部分,使系統硬件簡潔化,各類功能易于實現。
2.模塊電路設計與比較
1) 避障方案選擇
方案一:采用超聲波避障,超聲波受環境影響較大,電路復雜,而且地面對超聲波的反射,會影響系統對障礙物的判斷。
方案二:采用紅外線避障,利用單片機來產生38KHz信號對紅外線發射管進行調制發射,發射出去的紅外線遇到避障物的時候反射回來,紅外線接收管對反射回來信號進行解調,輸出TTL電平。外界對紅外信號的干擾比較小,且易于實現,價格也比較便宜,故采用方案二。
紅外線發射接受電路原理圖如圖2所示。
采用紅外線避障方法,利用一管發射另一管接收,接收管對外界紅外線的接收強弱來判斷障礙物的遠近,由于紅外線受外界可見光的影響較大,因此用250Hz的信號對38KHz的載波進行調制,這樣減少外界的一些干擾。 接收管輸出TTL電平,有利于單片機對信號的處理。采用紅外線發射與接收原理。利用單片機產生38KHz信號對紅外線發射管進行調制發射,發射距離遠近由RW調節,本設計調節為10CM左右。發射出去的紅外線遇到避障物的時候反射回來,紅外線接收管對反射回來信號進行解調,輸出TTL電平。利用單片機的中斷系統,在遇障礙物時控制電機并使小車轉彎。由于只采用了一組紅外線收發對管,在避障轉彎方向上,程序采用遇障礙物往左拐方式。如果要求小車正確判斷左轉還是右轉,需在小車側邊加多一組對管。外界對紅外信號的干擾比較小,性價比高。 。調試時主要是調制發射頻率為接收頭能接收的頻率,采用單片機程序解決。發射信號強弱的調節,由可調精密電阻調節。
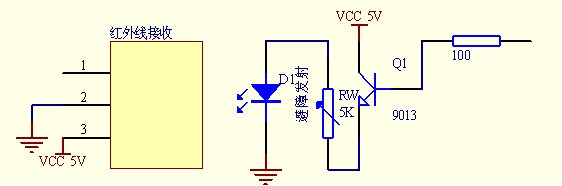 圖2 紅外線發射接受電路原理圖
2)檢測鐵片方案選擇
方案一:采用電渦流原理自制的傳感器,取才方便,但難以調試,輸出信號也不可*,成功率比較低,難以準確輸出傳感信息。
方案二:采用市面易購的電感式接近開關,本系統采用市面比較通用LJ18A3-8-Z/BX來完成鐵片檢測的任務。雖然電感式接近開關占的體積大,對本是可以接受,且輸出信號較可*,穩定性好,受外界的干擾小,故采用方案二。
檢測鐵片電路原理圖如圖3所示。 圖3 檢測鐵片電路原理圖
3)聲音提示
方案一:采用單片機產生不同的頻率信號來完成聲音提示,此方案能完成聲音提示功能,給人以提示的可懂性比較差,但在一定程度上能滿足要求,而且易于實現,成本也不高,我們出自經費方面考慮,采用方案一。
方案二:采用DS1420可分段錄放音模塊,能夠給人以直觀的提示,但DS1420錄放音模塊價格比較高,也可以采用此方案來處理,但方案二性價比不如方案一。
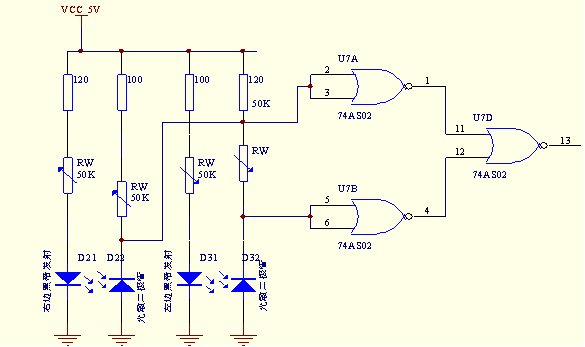
4)黑帶檢測方案選擇
方案一:采用發光二極管發光,用光敏二極管接收。由于光敏二極管受可見光的影響較大,穩定性差。
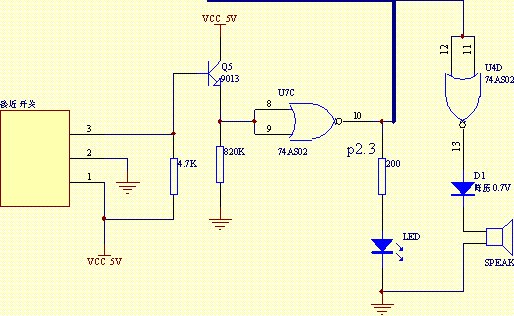
方案二:利用紅外線發射管發射紅外線,紅外線二極管進行接收。采用紅外線發射,外面可見光對接收信號的影響較小,再用射極輸出器對信號進行隔離。本方案也易于實現,比較可*,因此采用方案二。黑帶檢測電路圖如圖4所示。
輸出信號進入74LS02。穩定性能得到提升。當小車低部的某邊紅外線收發對管遇到黑帶時輸入電平為高電平,反之為低電平。結合中斷查詢方式,通過程序控制小車往哪個方向行走。電路中的可調電阻可調節靈敏度,以滿足小車在不同光度的環境光中能夠尋跡。由于接收對管裝在車底,發射距離的遠近較難控制,調節可調電阻,發現靈敏度總是不盡人意,最后采用在對管上套一塑料管,屏蔽外界光的影響,靈敏度大幅提升。再是轉彎的時間延遲短長控制。
圖4 黑帶檢測電路圖
3)計量路程方案
方案一:利用紅外線對射方式,在小車的車輪開一些透光孔來計量車輪轉過圈數,從而間接地測量路程。
方案二:利用霍爾元件來對轉過的車輪圈數來計程,在車輪子上裝小磁片,霍爾元件*近磁片一次計程為車輪周長。此方案傳感的信號強, 電路簡單,但精度不高。
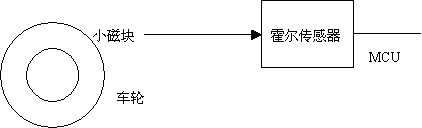
如果想達到一定的計量精度,用霍爾傳感元件比較難以實現,因為在車輪上裝一定量的小磁片會相互影響,而利用紅外線對射方式不會影響各自的脈沖,可達到厘米的精度,因此采用方案一來實現。計量路程示意圖見圖5。
通過計算車輪的轉數間接測量距離,利用了霍爾元件感應磁塊產生脈沖的原理,再對脈沖進行計數。另可采用紅外線原理提高記程精度,其方法為在車輪均勻打上透光小孔,當車輪轉動時,紅外光透射過去,不斷地輸出脈沖,通過單片機對脈沖計數,再經過一個數據的處理過程,這樣就可把小車走過的距離計算出來,小孔越多,計數越精密。
圖 5 計量路程示意圖
3)智能車驅動電路
方案一:采用分立元件組成的平衡式驅動電路,這種電路可以由單片機直接對其進行*作,但由于分立元件占用的空間比較大,還要配上兩個繼電器,考慮到小車的空間問題,此方案不夠理想。
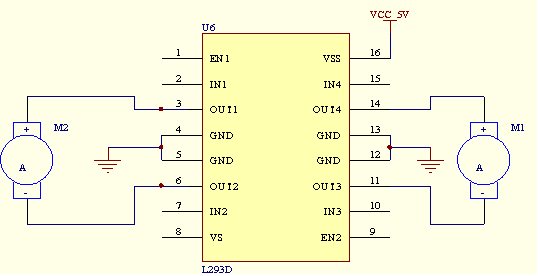
方案二:因為小車電機裝有減速齒輪組,考慮不需調速功能,采用市面易購的電機驅動芯片L293D,該芯片是利用TTL電平進行控制,對電機的*作方便,通過改變芯片控制端的輸入電平,即可以對電機進行正反轉*作,很方便單片機的*作,亦能滿足直流減速電機的要求。智能車驅動電路實現如圖6所示。
圖6 智能車驅動電路
小車電機為直流減速電機,帶有齒輪組,考慮不需調速功能,采用電機驅動芯片L293D。L293D是著名的SGS公司的產品。為單塊集成電路,高電壓,高電流,四通道驅動,設計用來接收DTL或者TTL邏輯電平,驅動感性負載(比如繼電器,直流和步進馬達),和開關電源晶體管。內部包含4通道邏輯驅動電路。其額定工作電流為1A,最大可達1.5A,Vss電壓最小4.5V,最大可達36V;Vs電壓最大值也是36V,經過實驗,Vs電壓應該比Vss電壓高,否則有時會出現失控現象。表1是其使能、輸入引腳和輸出引腳的邏輯關系。
表1 引腳和輸出引腳的邏輯關系
EN A(B) IN1(IN3) IN2(IN4) 電機運行情況
H H L 正轉
H L H 反轉
H 同IN2(IN4) 同IN1(IN3) 快速停止
L X X 停止
L293D可直接的對電機進行控制,無須隔離電路。通過單片機的I/O輸入改變芯片控制端的電平,即可以對電機進行正反轉,停止的*作,非常方便,亦能滿足直流減速電機的大電流要求。調試時在依照上表,用程序輸入對應的碼值,能夠實現對應的動作,調試通過。
3) 尋找光源功能
方案一:在小車前面裝上幾個光電開關,通過不同方向射來的光使光電開關工作,從而對小車行駛方向進行控制,根據光電開關特性,只有當光達到一定強度時才能夠導通,因此帶有一定的局限性。
方案二:在小車前面裝上參數一致的光敏二極管或者光敏電阻,再通過A/D轉換電路轉換成數字量送入單片機,單片機再對讀入的幾路數據進行存儲、比較,然后發出命令對外圍進*作。對方案一、二進行比較,方案二硬件稍為復雜,但能夠對不同強度的光進行采集以及比較,*作靈活,所以采用方案二。
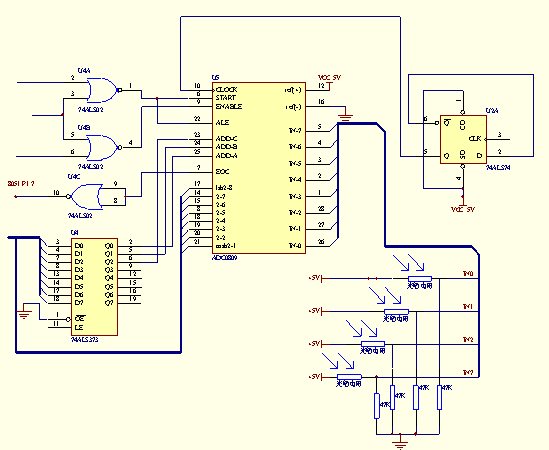
尋找光源電路圖如圖7所示。 圖7 尋找光源電路圖 3)顯示部分
方案一:采用LCD顯示,用單片機可實現顯示數據,但顯示亮度和字體大小在演示時不盡人意,價格也比較昂貴。
方案二:采用LED七段數碼管,采用經典電路譯碼和驅動,電路結構簡單,并且可以實現單片機I/O口的并用,顯示效果直觀,明亮,調試容易。故采用LED數碼管顯示。
4)顯示電路如圖8所示。
圖8 顯示電路
3. 系統原理及理論分析
1) 單片機最小系統組成
單片機系統是整個智能系統的核心部分,它對各路傳感信號的采集、處理、分析及對各部分整體調整。主要是組成是:單片機AT89S52、模數轉換芯片ADC0809、小車驅動系統芯片L293D、數碼管顯示的譯碼芯片74LS47、74LS138及各路的傳感器件。
2)避障原理
采用紅外線避障方法,利用一管發射另一管接收,接收管對外界紅外線的接收強弱來判斷障礙物的遠近,由于紅外線受外界可見光的影響較大,因此用250Hz的信號對38KHz的載波進行調制,這樣減少外界的一些干擾。 接收管輸出TTL電平,有利于單片機對信號的處理。
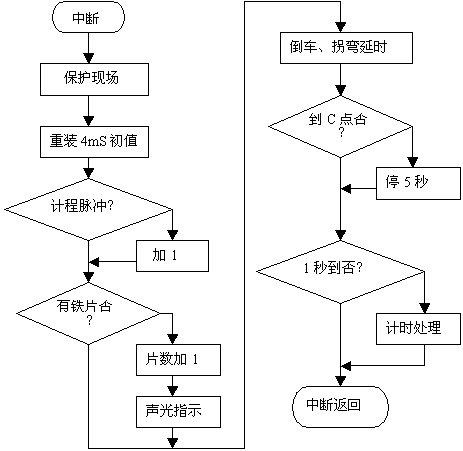
3)計程原理
通過計算車輪的轉數間接測量距離,在車輪均勻打上透光小孔,當車輪轉動時,紅外光透射過去,不斷地輸出脈沖,通過單片機對脈沖計數,再經過一個數據的處理過程,這樣就可把小車走過的距離計算出來。
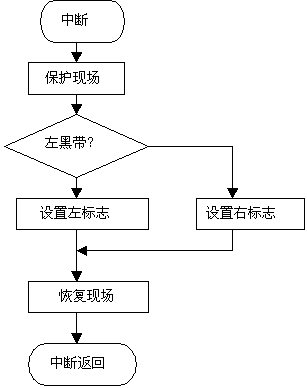
4)黑帶檢測原理
利用光的反射原理,當光線照射在白紙上,反射量比較大,反之,照在黑色物體上,由于黑色對光的吸收,反射回去的量比較少,這樣就可以判斷黑帶軌道的走向。由于各路傳感器會對單片機產生一定的干擾,使信號發生錯誤。因此,采用一級射極輸出方式對信號進行隔離,這樣系統對信號的判斷就比較準確。
4. 系統程序設計
用單片機定時器T0產生38KHz的方波,再用定時器T1產生250Hz的方波對38KHz方波進行調制。為了提高小車反應靈敏度,對紅外線接收信號及黑帶檢測信號都采用中斷法來處理。用定時方法對鐵片檢測、計量路程、倒車、拐彎及數碼管動態掃描進行處理。
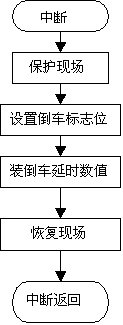
主程序流程圖見圖9,各子程序圖見圖10、圖11、圖12。
圖9 主程序流程圖
圖 10 外部中斷0服務子程序 圖 11 外部中斷1服務子程序 圖12 定時器1中斷子程序 6.調試及性能分析
整機焊接完畢,首先對硬件進行檢查聯線有無錯誤,再逐步對各模塊進行調試。首先寫入電機控制小程序,控制其正反轉,停機均正常。加入避障子程序,小車運轉正常,調整靈敏度達最佳效果。加入顯示時間子程序,顯示正常。鐵片檢測依*接近開關,對檢測信號進行處理并實時顯示和發出聲光信息,無異常狀況。路程顯示部分是對霍爾管脈沖進行計數,為了盡量達到精確,車輪加裝小磁片。接著對黑帶檢測模塊調試,發現有時小車會跑出黑帶,經判斷是因為紅外線收發對管靈敏度不高,調整靈敏度后仍然達不到滿意效果,疑是受環境光影響,利用塑料套包圍紅外線收發后問題解決。趨光電路主要由三個光敏電阻構成,調整三個光敏電阻的角度同時測試軟件,以最佳效果完成趨光功能。
整機綜合調試,上電后對系統進行初始化,接著控制電機使小車向前行駛,突然發現系統即刻進入外部中斷1,重復多次測試,結果都是自動進入該中斷。推斷是由剛上電時電機起動所引起,為了避免上電瞬間的影響,在啟動小車后延時幾毫秒,再開外部中斷,結果問題解決。允許的話應采用雙電源供電,即電機和電路應分開供電,L293D與單片機之間采用隔離信號控制。這樣就不會出現小車啟動時程序出錯和數碼管顯示閃動的問題。在計程精度上,可用紅外線原理獲得較高精度。
7.結論
通過各種方案的討論及嘗試,再經過多次的整體軟硬件結合調試,不斷地對系統進行優化,智能小車能夠完成各項功能到達車庫。
仿真原理圖如下(proteus仿真工程文件可到本帖附件中下載)

0.png (17.41 KB, 下載次數: 79)
下載附件
2018-8-8 03:21 上傳
0.png (6.58 KB, 下載次數: 65)
下載附件
2018-8-8 03:22 上傳
單片機源程序如下:
- #include"reg51.h"
- #define uchar unsigned char
- #define uint unsigned int
- uchar code seg[10]={0xc0,0xf9,0xa4,0xb0,0x99,0x92,0x82,0xf8,0x80,0x90};
- uchar code segnode[10]={0x40,0x79,0x24,0x30,0x19,0x12,0x02,0x78,0x00,0x10};
- #define digport P0
- #define dataport P1
- #define wordport P2
- #define r 45
- sbit eoc= P3^3;
- sbit clk= P3^4;
- sbit start= P3^6;
- sbit oe= P3^7;
- bit flag;
- uchar a[4]={0xff,0xff,0xff,0xff};//黑屏
- uchar dig=0x01;
- void delay(uint t)
- {for(;t<0;t--);}
- /*void display()
- {
- uchar i;
- wordport=0xff;
- for(i=0;i<4;i++)
- {
-
- wordport=a[i];
- digport=dig<<1;
- delay(300);
- }
- }*/
- void Display(void)
- {
- uchar i,k,select=0x01;
- for(i=0;i<=5;i++)
- { digport=select;
- wordport=a[i];
- select<<=1;
- for(k=0;k<=100;k++)//改
- {;}
- }
- }
- void time0() interrupt 1
- { clk=~clk; }
- void chuli()
- {
- unsigned long int da;
- //eoc=0;
- start=1;
- oe=1;
- da=dataport;
- delay(10);
- oe=0;
- // da=da*196;
- if(da<127)a[3]=0xbf;//128改127//127.5=127
- if(da>=127)a[3]=0xff;
- // if(da<5000||da>45000){da=0;}
-
- if(a[3]==0xff) {da=da-127; da=da*1961;} //}if(da>49000)da=50000;}
- if(a[3]==0xbf) {da=128-da; da=da*1961;}//128改127
-
- da=da*r;
- if(da>9000000)da=9000000;
- a[0]=seg[da/10000%10];
- if((da/1000%10)>5)
- a[0]=seg[da/10000%10+1];
- a[1]=segnode[da/100000%10];
- a[2]=seg[da/1000000];
- start=0;
- delay(10);
- }
- void main(void)
- { uchar k;
- delay(30);
- // IT1=1;EX1=1;
- TMOD=0x02;TH0=253;TL0=253;
- TR0=1;ET0=1;PT0=1;
- EA=1;
- //eoc=0;
- ……………………
- …………限于本文篇幅 余下代碼請從51黑下載附件…………
0.png (4.96 KB, 下載次數: 75)
下載附件
2018-8-8 03:21 上傳
0.png (9.41 KB, 下載次數: 70)
下載附件
2018-8-8 03:21 上傳
所有資料51hei提供下載 (含完整論文):
 測障測角小車.rar
(126.75 KB, 下載次數: 40)
測障測角小車.rar
(126.75 KB, 下載次數: 40)
2018-8-7 15:00 上傳
點擊文件名下載附件
下載積分: 黑幣 -5
| 










 QQ好友和群
QQ好友和群 QQ空間
QQ空間 騰訊微博
騰訊微博 騰訊朋友
騰訊朋友 收藏
收藏 淘帖
淘帖 頂
頂 踩
踩

