|
����MATLAB�Į���늄әC׃�l�{(di��o)�ٷ��挍�F(xi��n)
SIMULATION FOR FREQUENCY CONTROL SYSTEM OF ASYNCHRONOUS MOTOR BASED ON MATLAB
������Ҫ����������늄әCSPWM׃�l�{(di��o)��ʸ������ϵ�y(t��ng)�M�н�ģ�c���档׃�l�{(di��o)��ϵ�y(t��ng)�ڮ���늄әC�ĸ��N�{(di��o)�ٷ�ʽ��Ч����ߡ�������ã���������O����Ҫ�ĵ�λ��늚���ӿ���ϵ�y(t��ng)Ӌ��C�����Ǒ��ìF(xi��n)��ܛ�����ߌ��乤�������M���о���һ�Nʮ����Ҫ�ķ�����ͨ�^����ԇ���Ա��^���N�����c��������(y��u)�����_�����P����(sh��)������M��ϵ�y(t��ng)�����Dz��ɻ�ȱ�ģ���ƌW�Q���ṩ�˿ɿ�������(j��)��
���Ľ�B�˽����{(di��o)��ϵ�y(t��ng)�śr��ʸ�����ƵĻ��������Լ�����늄әC׃�l�{(di��o)��ϵ�y(t��ng)�� MATLAB/Simulink���湤����ģ�ͽ����Լ������о���һ���棬����ͨ�^����������늄әCʸ�������{(di��o)��ϵ�y(t��ng)�����ַ��棬�ó�ԓϵ�y(t��ng)�����ֵ��\�����ԣ���һ���棬ͨ�^���D(zhu��n)��(n��i)�h(hu��n)���D(zhu��n)�١�����]�h(hu��n)ʸ������ϵ�y(t��ng)���D(zhu��n)���l�ʿ��ƵĮ���늄әCʸ������ϵ�y(t��ng)�ķ��棬��Ϥ��ʸ������ϵ�y(t��ng)�ą���(sh��)�O�ú������ԡ�
����ͨ�^���挍�H�˽�������ˮ���늄әC�\�����ԣ�����Ҫ���ǵó��ķ��攵(sh��)��(j��)�����µČ���O������M���Mһ���_�l(f��)�����ˈԌ��Ļ��A��
����D��
matlab����

ժҪ
Ŀ�
1 �wՓ
1.1 ����
1.2 ����׃�l�{(di��o)�ټ��g�ĬF(xi��n)��
1.3 ���湤��MATLAB/Simulink����
1.4 ���I(y��)�OӋ���о���(n��i)�ݼ��¹�(ji��)����
2 ���ڄӑB(t��i)ģ�͵Į���늄әC�{(di��o)��ϵ�y(t��ng)����ԭ��
2.1 ����늄әC�Ĕ�(sh��)�Wģ��
2.2 ����׃�Q
2.3 ����늄әC�ڃ�������ϵ�ϵĔ�(sh��)�Wģ��
3 ��������늄әC���ܵķ����о�
3.1�ڽ�����r�®���늄әC��������
3.2 PWM׃�l��-늄әCϵ�y(t��ng)����
PWM
4 ��������늄әCʸ�������{(di��o)��ϵ�y(t��ng)����
4.1 �D(zhu��n)��(n��i)�h(hu��n)���D(zhu��n)�١�����]�h(hu��n)ʸ������ϵ�y(t��ng)���漰����
4.2 �D(zhu��n)���l�ʿ��ƵĮ���늄әCʸ������ϵ�y(t��ng)����
4.3 �ɷNʸ������ϵ�y(t��ng)�����c�c���ڵĆ��}
�Y(ji��)Փ
�����īI
���x
1 �wՓ
1.1 ����
늄әC�����ڹ��r(n��ng)�I(y��)���a(ch��n)�^������Ҫ�Ą�����Դ���l(f��)�]��������Ҫ�����á�늄әC�{(di��o)�����ܵĺÉģ����ڄ����a(ch��n)�ʡ���(ji��)�ܭh(hu��n)���a(ch��n)Ʒ�|(zh��)�������dz���Ҫ��Ӱ푡�ֱ��늄әC�D(zhu��n)���c����늄әC��ȣ��������ױ����ƺ��{(di��o)��(ji��)�������~���D(zhu��n)�����£�����ͨ�^�S�ք������㶨����׃늘�늉������팍�F(xi��n)���D(zhu��n)���{(di��o)�٣������~���D(zhu��n)�����ϣ�����ͨ�^�S��늘�늉��㶨���{(di��o)��(ji��)��ŵķ����팍�F(xi��n)�㹦���{(di��o)�١���˲����D(zhu��n)�ٺ�����p�]�h(hu��n)ֱ���{(di��o)��ϵ�y(t��ng)�ɫ@�Ã�(y��u)���ӑB(t��i)���o�B(t��i)�{(di��o)�����ԡ�
Ȼ�����S���Ƽ��IJ���l(f��)չ��ǰ�M��ֱ���{(di��o)�����cҲ���@�F(xi��n)����������ֱ���{(di��o)��ϵ�y(t��ng)��ʹ�ÓQ������ֱ��늄әC�S�o�������أ�����D(zhu��n)�١��ΙC�����Լ�ʹ�íh(hu��n)���ȶ��ܵ����ƣ����ֱ���{(di��o)��ϵ�y(t��ng)�đ��÷����Mխ����20���o30����ԁ��������{(di��o)�ټ��g�ɞ��˂��о��ğ��c��������늄әC�����Y(ji��)��(g��u)���c�Ƽs���{(di��o)�ټ��g�l(f��)չ��70 ����ԁ������S��늙C���Ƽ��g�������Ӽ��g���w�ٰl(f��)չ�������{(di��o)��ϵ�y(t��ng)����Ҳ�����L���M�����������_���cֱ���{(di��o)��ϵ�y(t��ng)�������ij̶ȣ���M�����a(ch��n)�l(f��)չ����Ҫ������������dz���ҕ�����{(di��o)�ټ��g���аl(f��)��
Ŀǰ�������{(di��o)��ϵ�y(t��ng)����ȡ��ֱ���{(di��o)��ϵ�y(t��ng)�������{(di��o)��ϵ�y(t��ng)�V�����ý�-ֱ-��׃�l�����齻���Դ����-ֱ-��׃�l����Ҫ�����������ֺ���׃���֣������������l�����������ֱ��늣���׃�����ٌ�ֱ�����׃���l�ʿ��{(di��o)���Ľ���늣��Ķ��M�����a(ch��n)�^���Ќ�늄әC�{(di��o)��ϵ�y(t��ng)������
ϵ�y(t��ng)������ָʹ��Ӌ��C�O���ģ�M������һ��ϵ�y(t��ng)���^�̵��\���О飬�Ķ��о�ԓϵ�y(t��ng)���^�̵�һ�N���g�����漼�g�Ǽ�ϵ�y(t��ng)��Փ��Ӌ��C���g������ԭ��������Փ��һ�w�ľC���Լ��g��늚���ӿ���ϵ�y(t��ng)��Ӌ��C�����Ǒ��ìF(xi��n)���ƌW�ֶΌ����M�пƌW�о���ʮ����Ҫ���ֶ�֮һ���������������늄әC�{(di��o)�ٿ���ϵ�y(t��ng)�ĸ�Ʒ�|(zh��)���ƾ��x���_ϵ�y(t��ng)���淽����о���
1.2 ����׃�l�{(di��o)�ټ��g�ĬF(xi��n)��
Ŀǰ������늙C׃�l�{(di��o)�ټ��g��(j��ng)���ɞ鮔��늙C�{(di��o)�ٵ���������������õ��˂����Pע����ҕ������늙C�{(di��o)��Ҳ������(j��ng)��늴��x�����{(di��o)�١�׃�O�{(di��o)�١������{(di��o)�١��D(zhu��n)�Ӵ�����{(di��o)�١��{(di��o)���{(di��o)�ٵ��м��{(di��o)�ٷ�ʽ���D(zhu��n)׃?y��u)�o�O�{(di��o)�ٷ�ʽ��׃�l�{(di��o)�ټ��g�w�ٰl(f��)չ�鮐��늄әC�ѽ�(j��ng)���Ԍ��F(xi��n)�o�Oƽ���{(di��o)���ṩ�˿��ܡ����ڮ���늄әC׃�l�{(di��o)��ϵ�y(t��ng)߀�����{(di��o)�ٷ������ă�(y��u)�c���ڹ��I(y��)�����I������u����ИO�{(di��o)�ٷ�ʽ������׃�l�{(di��o)�ٿ˷���ֱ���{(di��o)���е�һЩȱ�c����������r�͡��Y(ji��)��(g��u)���Ρ��Թ����õȃ�(y��u)�c���ѱ����J������ǰ;���{(di��o)�ٷ�ʽ��늹��I���и��N������늉��ȼ���׃�����ij��F(xi��n)��ʹ�ø�׃����늉���С�������F(xi��n)���Ķ�ʹ�����ϵ�y(t��ng)�ИI(y��)�õ����ٵİl(f��)չ���L���ԁ�������늵��l�ʱ��̶ֹ���׃������׃�l�{(di��o)�ټ��g�ij��F(xi��n)ʹ�ý���늵��l�ʿ��Կɿص�׃�����@�Ӿ�ʹ�ý���늵õ�������á�
�S���҇���(j��ng)�����ٰl(f��)չ�����I(y��)�Ԅӻ��I����׃�l�{(di��o)���γ���һ������Ј����ձ����⡢��ʿ�������T�ӡ�ABB�ȇ��˾�Ⱥ��M���Ї��Ј������Ї����S�����˾�a(ch��n)Ʒ����sռ�Ї�׃�l���Ј�80%�Ј����~����(j��ng)�^��30 ��İl(f��)չ������(n��i)���������`�������A����Ӣ���v���R���Ƚ�300��҇��a(ch��n)׃�l���_���Ј����ѽ�(j��ng)ȡ���˺ܺõĘI(y��)�����ڇ���(n��i)׃�l���Ј�Ʒ���У���(n��i)�YƷ�Ƽsռ70%���ң����Ј����~�sֻ��30%���ң��I(y��)��(n��i)��ʿ����δ��ʮ����Ј������_��͠�B(t��i)�����ԓ�ИI(y��)�l(f��)չ?ji��)���ʮ�ֿ��^��
׃�l�{(di��o)�ټ��g���о��F(xi��n)��l(f��)չڅ�ݴ��w�ɚw�Y(ji��)�����ׂ����棺
1�����������İl(f��)չ�������������������o��ʮ����_ʼ���ɵ�һ����ؾ��l�� SCR�����P�������������l(f��)չ��ȫ�������T��GTO��GTR�����MOSFET��IGBT��IGCT �Լ����ܹ���ģ�K(IPM)��IEGT(�͉��_4KV���ϵ�IGBTϵ������������)����Ҫ���ͨ�B(t��i)늉����߉���������ģ�K���b������l(f��)չ��
2�����Ʋ��Եİl(f��)չ��׃�l��������ĺ㉺�l�ȿ��Ʒ�ʽ(V/F)���D(zhu��n)���l�ʿ��Ʒ�ʽ(SF)�l(f��)չ��ʸ�����Ʒ�ʽ(VC)��ֱ���D(zhu��n)�ؿ��Ʒ�ʽ(DTC)���{(di��o)�پ��Ⱥ̈́ӑB(t��i)�����Ͼ������@��ߡ�
3����Ӽ��g�İl(f��)չ��������ʸ������ϵ�y(t��ng)�����]�и�Ч��̎����֧�֣������y���F(xi��n)��16λ��32λ����̎�����������c̎���Ԫ��DSP�͌��ü����·ASIC(Application Specific IC)���g�Ŀ��ٰl(f��)չ���錍�F(xi��n)׃�l�{(di��o)������Ч��ܻ��ṩ��Ӳ��֧�֡�
4���a(ch��n)Ʒ�����a(ch��n)�����A���I(y��)���N���I(y��)����I(y��)�ĸ��ٰl(f��)չ����׃�l�����P�������a(ch��n)�ṩ������֧�֡�
5���߉�����׃�l�{(di��o)���b���Լ�����ͬ��늄әC�������ϵ�y(t��ng)�İl(f��)չ����Щ����H�ϸ߉��������������(li��n)���g�Ͷ��ƽ���g�İl(f��)չ��ʹ�߉�׃�l�{(di��o)�ٵ��Ԍ��F(xi��n)���������@�Ĺ�(ji��)��Ч����
1.3 ���湤��MATLAB/Simulink����
MATLAB�Ǿ�ꇌ���ң�Matrix Laboratory���ĺ��Q��������MathWorks��˾��Ʒ���̘I(y��)��(sh��)�Wܛ���������㷨�_�l(f��)����(sh��)��(j��)��ҕ������(sh��)��(j��)�����Լ���(sh��)ֵӋ��ĸ����gӋ���Z�Ժͽ���ʽ�h(hu��n)������Ҫ����MATLAB��Simulink�ɴ֡�MATLAB�����M�о���\�㡢�L�ƺ���(sh��)�D��͔�(sh��)��(j��)�����F(xi��n)�㷨����(chu��ng)���Ñ����桢�B�����������Z�Գ���ȣ���Ҫ�����ڹ���Ӌ�㡢�����OӋ����̖̎���cͨӍ���D��̎������̖�z�y�����ڽ�ģ�OӋ�c�������I�F(xi��n)��MATLABܛ�������V�������ڿ����I��Ҳ�����������Ĺ��̺ͷǹ����I��
MATLAB���кܶ���(y��u)�c�����磺�˸��Z�Կ����ڼ��gӋ�㣻���_�l(f��)�h(hu��n)���Ɍ����a���ļ��͔�(sh��)��(j��)�M�й���������ʽ���߿��������ķ�ʽ̽�顢�OӋ����↖�}����(sh��)�W����(sh��)�����ھ��Դ���(sh��)���y(t��ng)Ӌ�������~�������Y�x����(y��u)���Լ���(sh��)ֵ�e�ֵ� �����S�����S�D�κ���(sh��)�����ڿ�ҕ����(sh��)��(j��)�����N���߿����ژ�(g��u)���Զ��x�ĈD���Ñ����棻���N����(sh��)�Ɍ�����MATLAB���㷨�c�ⲿ���ó�����Z�ԣ���C��C++��Fortran��Java��COM �Լ�Microsoft Excel�����ɡ�
Simulink��һ���Á팦�ӑB(t��i)ϵ�y(t��ng)�M�н�ģ������ͷ�����ܛ�����������Ñ��ṩ���÷���D�M�н�ģ�ĈD�νӿڣ�ʹ�ý�ģ�����ü��P������һ�����ס�Simulink���S�Ñ����ƺ̈́�(chu��ng)���Լ���ģ�K��Simulink�ǽ�ģ�����ҕ��ܛ�������ÿ�D��ʾϵ�y(t��ng)�ĸ����h(hu��n)��(ji��)���Î�������B��������ʾ���h(hu��n)��(ji��)��ݔ��ݔ���Pϵ�����ϵ�y(t��ng)(SimPower System)ģ�K���nj�����RLC�·���������·��늙C���ӿ���ϵ�y(t��ng)�����ϵ�y(t��ng)�����õ�ģ�͎졣ģ�͎��а����˸��N��ֱ���Դ������늚�Ԫ������늹��y���x���ȡ������@Щģ�K����ģ�M������ϵ�y(t��ng)������τӿ���ϵ�y(t��ng)�����ϵ�y(t��ng)�\�к��ϵĸ��N��B(t��i)�\�С�
1.4 ���I(y��)�OӋ���о���(n��i)�ݼ��¹�(ji��)����
�����I(y��)�OӋ��Ҫ��MATLABܛ������ʸ�����Ɨl���µĮ���늄әC׃�l�{(di��o)��ϵ�y(t��ng)���M�з��棬���µ��¹�(ji��)�������£�
��һ�£��wՓ
�����I(y��)�OӋ�о������M���f������������늄әC�{(di��o)��ϵ�y(t��ng)�����I�����P���g�İl(f��)չ�M�и��������Һ��ν�B��MATLAB/Simulink���湤�ߡ�
�ڶ��£����ڄӑB(t��i)ģ�͵Į���늄әC�{(di��o)��ϵ�y(t��ng)�Ĺ���ԭ��
��B����늄әC��(sh��)�Wģ�ͣ��ڮ���늄әC��(sh��)�Wģ�͵Ļ��A��������늙C������׃�Q������B��ʸ�����Ƶ�ԭ����
�����£�����늄әC���ܵķ����о�
��MATLAB/Simulink�У�ͨ�^�����о�����늄әC�����ԡ������ǽ�B��\�ͽ�������늄әC������늉��µĹ�����r��Ȼ���nj���������늄әC��׃�l����늕r�Ĺ�����r�M�з�����
�����£���������늄әCʸ������׃�l�{(di��o)��ϵ�y(t��ng)�ķ���
��MATLAB/Simulink�У��քe���D(zhu��n)���l�ʿ��ƵĮ���늄әCʸ������ϵ�y(t��ng)�͎��D(zhu��n)��(n��i)�h(hu��n)���D(zhu��n)�١�����]�h(hu��n)ʸ������ϵ�y(t��ng)���ڲ�ͬ�Ľo���D(zhu��n)�ٗl���µķ���,���������^��
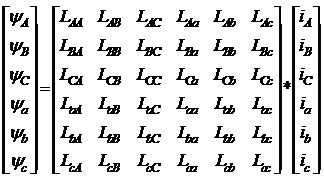
2 ���ڄӑB(t��i)ģ�͵Į���늄әC�{(di��o)��ϵ�y(t��ng)����ԭ������늄әC���зǾ��ԡ�����ϡ���׃�������|(zh��)��Ҫ�@�ø߄ӑB(t��i)�{(di��o)�����ܣ���횏ĄӑB(t��i)ģ�ͳ��l(f��)����������늄әC���D(zhu��n)�غʹ�朿���Ҏ(gu��)�ɣ��о������ܮ���늄әC���{(di��o)�ٷ�����ʸ������ϵ�y(t��ng)��ֱ���D(zhu��n)�ؿ���ϵ�y(t��ng)���ѽ�(j��ng)�@�ó��쑪�õăɷN���ڄӑB(t��i)ģ�͵ĸ����ܽ���늄әC�{(di��o)��ϵ�y(t��ng)��ʸ������ϵ�y(t��ng)ͨ�^ʸ��׃�Q�Ͱ��D(zhu��n)�Ӵ�朶��õ���Ч��ֱ��늄әCģ�ͣ�Ȼ��ģ��ֱ��늄әC�Ŀ��Ʋ����OӋ����ϵ�y(t��ng)�� 2.1 ����늄әC�Ĕ�(sh��)�Wģ��1.���о�����늄әC�Ķ�׃����(sh��)�Wģ�͕r���������¼��O�� ��1�����Կ��g�C�����O�����@�M���Q���ڿ��g����  (늽Ƕ�)�����a(ch��n)���Ĵńӄ��ؚ�϶�A�ܰ�����Ҏ(gu��)�ɷֲ��� ��2�����Դ�·����@�M���Ըкͻ��ж��Ǻ㶨�ģ� ��3�������F�ēp�ģ� ��4�������]�ضȺ��l�ʵ�׃����늙C����(sh��)��Ӱ푡� �oՓ늄әC�D(zhu��n)�����@���͵�߀����\�͵ģ���������Ч���@���D(zhu��n)�ӣ������ӂ�(c��)��������ÿ���@�M�є�(sh��)����ȡ��@�ӣ����H늄әC�ͱ���Ч��Dʾ�����ஐ��늄әC������ģ�͡������ஐ��늄әC����ģ���У����������@�M�S��A��B��C�ڿ��g�ǹ̶��ģ��ʶ��x�������oֹ����ϵ���OA�S�酢�������S���D(zhu��n)����  �ٶ����D(zhu��n)���D(zhu��n)���@�M�S����a��b��c�S�D(zhu��n)�����D(zhu��n)���D(zhu��n)��a�S�Ͷ���A�S�g��늽ǶȲ�  ����g��λ��׃������D2-1��ʾ�������ஐ��늄әC����ģ�͡� �D2-1 ���ஐ��늄әC����ģ�� 2.����늄әC�����ӑB(t��i)ģ�͵Ĕ�(sh��)�W���_ʽ ��1����朷��� ����늄әC�Ĕ�(sh��)�Wģ����������늉����̡���朷��̡��D(zhu��n)�ط��̺��\�ӷ��̽M�ɣ����д�朷��̺��D(zhu��n)�ط��̞����(sh��)���̣�늉����̺��\�ӷ��̞��ַ��̡� ����늄әCÿ���@�M�Ĵ�������������Ըд�机������@�M�����Ļ��д��֮�ͣ���ˣ������@�M���������ʾ�� ʽ�У�L��6x6�A��늸о�ꇣ����Ќ��Ǿ�Ԫ��  ��  ��  ��  ��  ��  �Ǹ����P�@�M���ԸУ������헄t���@�M�g�Ļ��С�����ÿһ��@�M���f��������朵Ĵ�ͨ�ǻ��д�ͨ�c©��֮ͨ�ͣ���ˣ����Ӻ��D(zhu��n)�Ӹ����ԸО飺 �����@�M֮�gֻ�л��У����е���r�^����s�����Ӻ��D(zhu��n)�ӵ������@�M֮�g�Ļ��пɿ��]�Ѓ��һ���A��B��C���@�M��a��b��c���@�M֮�g��λ�ù̶����ʻ��О鳣��(sh��)����һ��Ƕ�����һ���c�D(zhu��n)����һ��֮�g��λ����׃���ģ������ǽ�λ�Ʀȵĺ���(sh��)�����������@�M���S���ڿ��g����λ���� 늽Ƕȣ��ڼ��O���ͨ�����ҷֲ�����r�£��У� �����D(zhu��n)���g�Ļ��О飺
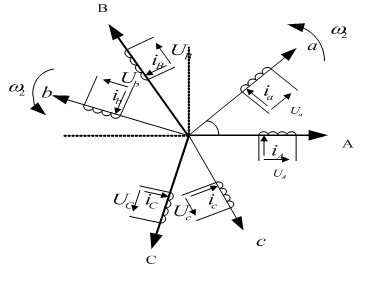
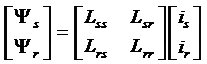
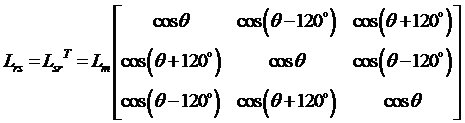
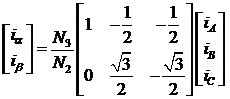
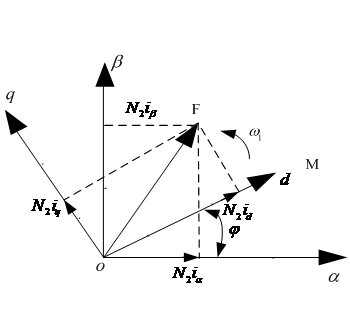
��ꇷ��̌��ɷ։K��ꇵ���ʽ�� �����Ըо�ꇣ� 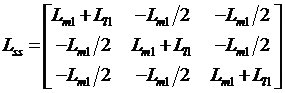 �D(zhu��n)���Ըо�ꇣ� 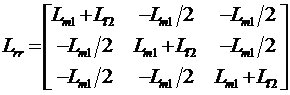 ���ӡ��D(zhu��n)��֮�g�Ļ��о�ꇣ�  ��  �ɂ��։K��ꇻ����D(zhu��n)�ã����c�D(zhu��n)��λ�����P���Ǖr׃Ԫ�أ��@�����ϵ�y(t��ng)�Ǿ��Եĸ�Դ������������׃�Q��׃����(sh��)�D(zhu��n)�Q�Ʌ���(sh��)�� ��2��늉����� ���ඨ���@�M늉�ƽ�ⷽ��ʽ�飺 �����D(zhu��n)���@�M���㵽���ӂ�(c��)���늉�����ʽ�飺 �������������㵽���ӂ�(c��)����늉������þ����ʽ��ʾ�Ɍ��ɣ� ��3���D(zhu��n)�ط��� ���ՙC������D(zhu��n)�Qԭ���������늴��D(zhu��n)��  �ı��_ʽ�� ʽ�У�  ����늴��D(zhu��n)�أ�  ����늙C�ĴŘO����(sh��)�� ��4���\�ӷ��� ������늄әC�S�ϵ��D(zhu��n)���c늄әC�ٶ�׃��֮�g���Pϵ�������\�ӷ��́����_��һ����r�£�늚����ϵ�y(t��ng)���\�ӷ���ʽ�飺 ���ں��D(zhu��n)��ؓ�dD=K=0���t�� �����Į���늄әC�ӑB(t��i)ģ�����ھ��Դ�·���ńӄ��ڿ��g�����ҷֲ��ļٶ��l���µó����ģ��������D(zhu��n)��늉������δ���κμ��O����ˣ�ԓ�ӑB(t��i)ģ����ȫ�����Á���������늉�������C�������ஐ��늄әC�{(di��o)��ϵ�y(t��ng)�ĄӑB(t��i)�^�̡� 2.2 ����׃�Q�����@�M������������ă����������Q�@�M��Ч�������Чԭ�t�Ǯa(ch��n)������Ǵńӄݡ����^������ָ�����@�M�g�o�s���l�����������ڼs���l�������^������ָ�����@�M�ڿ��g�ϻ���  �����^���Q�ǃ����@�M���є�(sh��)����ֵ��ȡ��D2-2���L�������@�M�����£�ͨ�^����ƽ�⽻�����  ��  ��Ҳ�ܮa(ch��n)�����D(zhu��n)�ńӄݡ��������@�M�̓����@�M�a(ch��n)���ăɂ����D(zhu��n)�ńӄݴ�С���D(zhu��n)�ٶ���ȕr�����J������@�M�c�����@�M��Ч���@����3/2׃�Q����������ϵ�̓�������ϵ����ģ����D2-2��ʾ�� 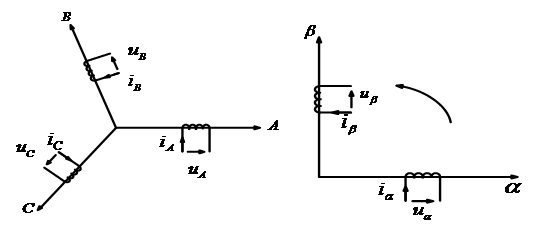
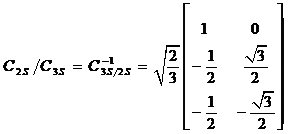
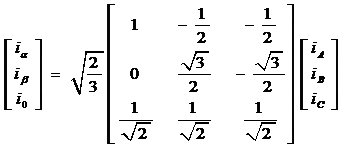
�D2-2 ��������ϵ�̓�������ϵ����ģ�� ����늄әC����ԭʼ�ӑB(t��i)ģ���ஔ���s������������@�M�Ǿ��Է���ʮ�����y������늄әC��(sh��)�Wģ��֮���ԏ��s���P�I�������һ�����s��늸о�ꇺ��D(zhu��n)�ط��̣������w�F(xi��n)�ˮ���늄әC��늴���Ϻ������D(zhu��n)�Q�ď��s�Pϵ����ˣ����늴�����Pϵ���֡� �����є�(sh��)�����������@�Md��q���քeͨ��ֱ�����  ��  ���a(ch��n)���ϳɴń�F����λ���������@�M���f�ǹ̶��ġ�����˞�������ɂ��@�M�ڃ�(n��i)�������F����ͬ���D(zhu��n)�����D(zhu��n)���t�ń�F��ȻҲ�S֮���D(zhu��n)�������ɞ����D(zhu��n)�ńӄݡ�����@�����D(zhu��n)�ńӄݵĴ�С���D(zhu��n)���c�̶��Ľ����@�M�a(ch��n)�������D(zhu��n)�ńӄ���ȣ���ô�@�����D(zhu��n)��ֱ���@�MҲ�ͺ�ǰ����̶��Ľ����@�M��Ч�ˡ����D(zhu��n)��������ϵ������ģ����D2-3��ʾ�� �D2-3 ���D(zhu��n)��������ϵ������ģ�� �ɴ˿�Ҋ���Ԯa(ch��n)����ͬ�����D(zhu��n)�ńӄݞ�ʄt�����ཻ���@�M�����ཻ���@�M�����D(zhu��n)��ֱ���@�M�˴˵�Ч�������f������������ϵ��  ��  ��  ���ڃ�������ϵ�µ�  ��  �Լ������D(zhu��n)��������ϵ�µ�ֱ��  ��  �a(ch��n)�������D(zhu��n)�ńӄ���ȡ��ڈD2-3�е�d��q�ɂ��@�M���ԣ����^����վ�ڵ����Ͽ���ȥ���������c���ཻ���@�M��Ч�����D(zhu��n)ֱ���@�M������������D(zhu��n)�����F���Ͽ��������͵ĵĴ_�_��һ��ֱ��늄әC������ģ�͡� �@�ӣ�ͨ�^����ϵ��׃�Q�������ҵ��c�������@�M��Ч��ֱ��늄әCģ�͡��F(xi��n)�ڵĆ��}�������� �� �� �c �� �� �� ֮�g�ʴ_�ĵ�Ч�Pϵ���@��������׃�Q���΄ա� 1.����-����׃�Q��3/2׃�Q�� A��B��C�������oֹ�@�M��ÿ���@�M����Ч�є�(sh��)��  ��ͨ������ƽ�������������a(ch��n)���ϳɴńӄ�F����ͬ���D(zhu��n)��  ���D(zhu��n)��A��B��C�S�Q�������oֹ����ϵ������������oֹ�@�M��ÿ���@�M����Ч�є�(sh��)��  �������ڿ��g����  ����ͨ��r�g�ϻ��� �ă��������Ҳ�a(ch��n)���c����ͬ�Ĵńӄ�F������ͬ���D(zhu��n)��  ���D(zhu��n)���������S�Q������oֹ����ϵ�����M������/��������׃�Q�r�����࿂�ńӄݑ�ԓ�c���࿂�ńӄ���ȣ������@�M˲�r���ńӄ��ڦ������S�ϵ�ͶӰ������ȣ����ɾ����ʽ���ã� ��׃�Qǰ���ʲ�׃��ǰ���£��õ��є�(sh��)�Ȟ飺 �����oֹ����ϵ��Ч׃�Q�������oֹ����ϵ��׃�Q��ꇣ� ����ă����oֹ����ϵ׃�Q�������oֹ����ϵ�������������V��ꇵķ�������  �U�ɷ�ꇣ���������֮���ٳ������ӵ�һ�У��ã�
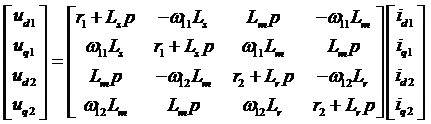
���˱������ù��ʲ�׃�l���µ�����׃�Q��ꇣ��茢׃�Q���׃?y��u)鷽ꇣ���ˣ��?img id="aimg_sjXxW" onclick="zoom(this, this.src, 0, 0, 0)" class="zoom" width="15" height="13" src="http://c.51hei.com/a/huq/a/a/a/71/71.063.jpg" border="0" alt="" />��  ����ϵ�����O���S���ã� ������ʽͬ���m����늉��ʹ�朵�׃�Q��ꇡ� 2.�oֹ����-���D(zhu��n)����׃�Q��2s/2r׃�Q�� ���oֹ������������ϵ���µ����D(zhu��n)��������ϵdq��׃�Q���Q���oֹ����-���D(zhu��n)����׃�Q�����Q2s/2r׃�Q��  ������oֹ����ϵ�y(t��ng)(2S)�c�ň������M-T����ͬ�����D(zhu��n)����ϵ�y(t��ng)(2r)֮�g��׃�Q�Q�����/����׃�Q�����Q  ׃�Q����D2-4��ʾ�� �D2-4 �oֹ������������ϵ�����D(zhu��n)��������ϵ�дńӄ�ʸ�� �D�Ѓ��ཻ�����  ������ֱ�����  ���a(ch��n)��ͬ�ӵ���ͬ���ٶ�  ���D(zhu��n)�ĺϳɴńӄ�F�����ڸ��@�M�є�(sh��)��ȣ�������ȥ�ńӄ��е��є�(sh��)�������������ʾ�����Ǵ˕r������ǿ��gʸ�������Ǖr�g������  �S��  �S�oֹ���ӣ�����  ��  �Ĵ�С�s�S�r�g��׃�����ஔ��  ��  �@�M�ڵĽ����ńӄݵ�˲�rֵ��M�S�� �S֮�g�ĊA��  ���S�r�g��׃���ģ���M�S���D(zhu��n)�ӿ���朿��gʸ�������غϣ��ɈD��֪�� ���ɾ����ʽ�飺 ʽ�У� �����ͬ�����D(zhu��n)����ϵ׃�Q�������oֹ����ϵ��׃�Q��ꇡ� ��֮���Ƀ����oֹ����ϵ׃�Q������ͬ�����D(zhu��n)����ϵ��׃�Q��ꇞ飺 늉��ʹ�朵����D(zhu��n)׃�Q���Ҳ�c���(�ńӄ�)�����D(zhu��n)׃�Q�����ͬ�� 2.3 ����늄әC�ڃ�������ϵ�ϵĔ�(sh��)�Wģ��1.������������D(zhu��n)����ϵ(dq����ϵ)�ϵĔ�(sh��)�Wģ�� ��������ϵ�������oֹ�ģ�Ҳ���������D(zhu��n)�ģ������������D(zhu��n)������ϵ���Ҋ��һ�N��r���ɴˣ���ijһ���w��������ϵ�ϵĔ�(sh��)�Wģ�;��������^�����ˡ� �O��������d�S�c��������A�S�ĊA�Ǟ�  ��  ��dq����ϵ�����ڶ��ӵĽ��ٶȣ�  ��dq����ϵ�������D(zhu��n)�ӵĽ��ٶȡ�Ҫ�������oֹ����ϵ�ϵ�늉����̡���朷��̺��D(zhu��n)�ط��̶�׃�Q���������D(zhu��n)����ϵ�ρ�������������3S/2S׃�Q������ʽ�еĶ��Ӻ��D(zhu��n)�ӵ������늉�����机��D(zhu��n)�ض��D(zhu��n)�Q�������oֹ����ϵ  �ϣ�Ȼ���������D(zhu��n)׃�Q���  ���@Щ׃����׃�Q���������D(zhu��n)����ϵdq�ϡ����Ӹ�������1��ʾ���D(zhu��n)�Ӹ�������2��ʾ�����w��׃�Q�^�̱��^���s��׃�Q��õ��Ĕ�(sh��)�Wģ�����¡� ��1��dq����ϵ�е�늉����̣� ��2��dq����ϵ�еĴ�朷��� ��(sh��)�Wģ�ͺ����ĸ���ԭ��ɏĴ�朷��̺�dq����ϵ����ģ���Ͽ��������朷��̞飺 ����׃�Q��dq����ϵ���Ժ��Ӻ��D(zhu��n)�ӵ�Ч�@�M�����ڃɸ��S�ϣ����҃��S���ֱ������֮�g�]�л��е�����Pϵ�����д��ֻ��ͬ�S�@�M֮�g���ڣ�����ʽ��ÿ����朷���ֻʣ����ˡ� ��3��dq����ϵ�е��D(zhu��n)�ط��̺��\�ӷ��� ������׃�Q��ꇴ���ABC��������ϵ�е��D(zhu��n)�ط���ʽ�������õ�dq0����ϵ�е��D(zhu��n)�ط��̞飺 ������dq0����ϵ�е��\�ӷ��̞飺 2.���D(zhu��n)�Ӵň�����ă���ͬ�����D(zhu��n)����ϵ�ϵĔ�(sh��)�Wģ�� �Od�S�����D(zhu��n)�Ӵ��  �ķ��Q֮M�S��q�S��r����D(zhu��n)  ������ֱ��M�S���Q��T�S���@�Ӄ���ͬ�����D(zhu��n)������ϵ�;��wҎ(gu��)����MT����ϵ�������D(zhu��n)�Ӵň����������ϵ������ϵ���D(zhu��n)�ٶȵ���ͬ�����ٶ�  �D(zhu��n)�����D(zhu��n)�Cе���ٶȞ�  ��MT�S�������D(zhu��n)�ӵĽ��ٶȞ�  �������D(zhu��n)��Ľ��ٶȡ�MT����ϵ�ϵĔ�(sh��)�Wģ�ͣ�
1
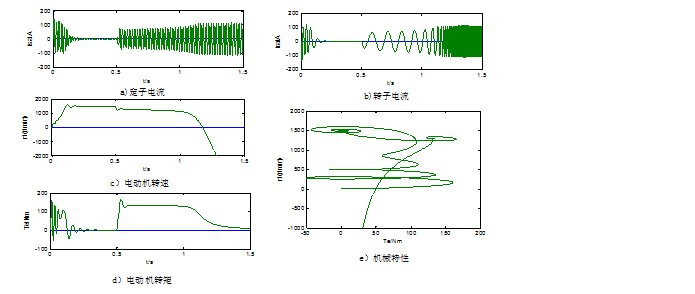
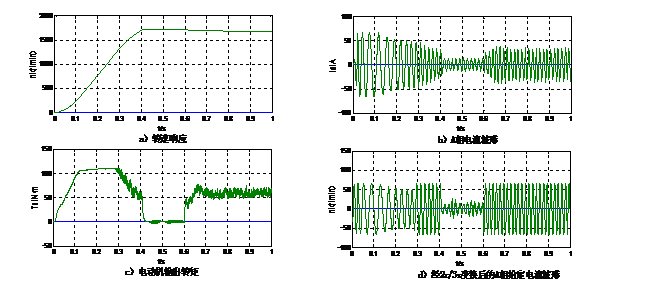
����������W���I(y��)�OӋ 3 ��������늄әC���ܵķ����о�������Ҫͨ�^�����о�����늄әC�����ԣ�����һ�½�������늄әCʸ�������{(di��o)��ϵ�y(t��ng)�ķ�����»��A����Ҫ��(n��i)������MATLAB/Simulink�����h(hu��n)���£������nj���\�ͽ�������늄әC�����ҽ���늉��µĹ�����r�M�з��棬����(sh��)�O���Լ������ε����ԣ�Ȼ���nj�����׃�l����늕r����늄әC�Ĺ�����r�M�з��棬�������P�����M�з����� 3.1�ڽ�����r�®���늄әC��������1.����ԭ�� �����ஐ��늙C�����ཻ���Դ�r�����ඨ���@�M���^�������Q����a(ch��n)��������ńӄݣ��������D(zhu��n)�ńӄݣ����a(ch��n)�����D(zhu��n)�ň���ԓ���D(zhu��n)�ň��c�D(zhu��n)�ӌ��w֮�g�������и��\��,����(j��)늴ŸБ�ԭ��,�D(zhu��n)�ӌ��w�a(ch��n)���Б�늄ӄݲ��a(ch��n)���Б�������d�����D(zhu��n)�ӌ��w�ڴň����ܵ�늴������ã��γ�늴��D(zhu��n)�أ��(q��)���D(zhu��n)�����D(zhu��n)����늄әC�S�ώ��Cеؓ�d�r��������ݔ���Cе�ܡ����ஐ��늄әC���D(zhu��n)�����h�������D(zhu��n)�ň���ͬ���D(zhu��n)�٣�ʹ�D(zhu��n)�Ӻ����D(zhu��n)�ň��g�������\�ӣ��Ķ����C�D(zhu��n)�ӵ��]�ό��w�и������������������a(ch��n)���D(zhu��n)�ء� 2.��Simulink�н�������늄әC����ģ�͵Ľ��� ��Simulink�Ю���늄әC�B�����������Դ�r����ģ����D3-1��ʾ�� 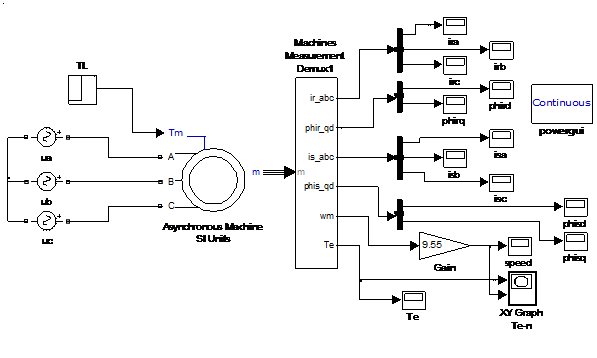 �D3-1 �����l���®���늄әC����ģ�� ����늄әC�B�����������Դ��늄әCؓ�d�ɳ���(sh��)ģ�KTL�O����늄әC����(sh��)ͨ�^늄әC�y��ģ�K��Machines Measurement Demux���y����ͨ�^ʾ�����^�y늄әC�������������isa��isb��isc�����D(zhu��n)�����������ira��irb��irc)���D(zhu��n)��speed���D(zhu��n)��Te��������XY�Dʾ�x��XY Graph���^�y늄әC�ęCе���ԣ�Te-n���ԣ���ģ�ͅ���(sh��)���3-1��ʾ�� ��3-1 ����늄әC�����о�ģ�ͅ���(sh��) | | | | | | | | | | | | | | | | | | | | | 0.05kg��  | | | | | | | | | | | | | | |
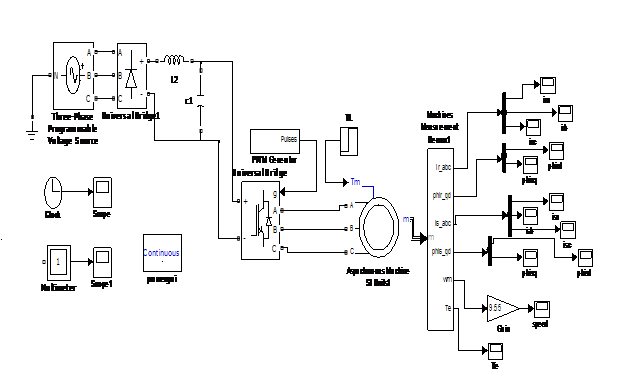
3.��������늄әC�ķ��沨�� ������늄әC�B���������ҽ����Դ�r������늄әC���沨����D3-2��ʾ�� �D3-2 ����늄әC�ķ��沨�� 4.������늄әC���沨�εķ��� 늄әC���~��늉��¿��d���ӕr���D3-2�քe�����˶���������D(zhu��n)�������늄әC�D(zhu��n)�١�늄әC�D(zhu��n)�غ͙Cе����׃����r�� ��늄әC���ӵ����d�\�к��^�d�\���^���У�����������D(zhu��n)�������D3-2��a����(b)��ʾ�����������S���D(zhu��n)�ٵ�������������pС����0.5s���d�������Ѹ�������������50Hz�����Ҳ����D(zhu��n)�������׃���c���������ͬ�����Ǐ��D(zhu��n)������IJ��ο��Կ������D(zhu��n)������l���S늄әC�D(zhu��n)���ʵ�׃����׃�����چ����^�����S�D(zhu��n)�������D(zhu��n)����׃С���D(zhu��n)������l���½�����늄әC�_��������d�D(zhu��n)��1500r/min���D(zhu��n)������Ĵ�С���l�ʶ���0������ؓ�d���S�D(zhu��n)�ٵ��½��ͷ�����D(zhu��n)��׃���D(zhu��n)������l�������ӡ� �ɈD3-2��c������d����֪�����ӕr늄әC�D(zhu��n)��Ѹ����������0.2s�r�܉��_����(w��n)���D(zhu��n)��1500r/min���ҡ����A�S��̖TLģ�M����t=0.5s�r�o늄әC����ؓ�d�D(zhu��n)��132N��m���˕r�^��늄әC�D(zhu��n)��֪��늄әC�D(zhu��n)���½����D(zhu��n)����׃����1.45s�r�D(zhu��n)���½���0�����ԓؓ�d�h����늄әC�~��ؓ�d40N��m��1.45s��늄әC�D(zhu��n)��׃?y��u)�ֵؓ���@�r�ஔ��늄әC��λ����ؓ�d��ؓ�d�^��ʹ��늄әC̎�ڵ������D(zhu��n)�Ġ�B(t��i)���D3-2��d����늄әC���D(zhu��n)��푑��������н���늄әC���D(zhu��n)���в��ӵģ������^�d�r����늄әC���D(zhu��n)�r��늄әC�a(ch��n)����С���D(zhu��n)�ء� �D3-2��e����늄әC�ĄӑB(t��i)�Cе���ԣ�ԓ�Cе�����c��Փ�Ϯ���늄әC���ӡ����d�\���Լ���ؓ�d�\�еęCе������һ�¡��ڮ���늄әC���ӕr�����D(zhu��n)��׃�����^�˕r늄әC���D(zhu��n)���^�ͣ������d�\�Еr���D(zhu��n)�����^С��늄әC�D(zhu��n)���^�ߣ���t=0.5s�r���o늄әC����ؓ�d�D(zhu��n)��132N��m���h����늄әC�~��ؓ�d40N��m���˕r����늄әC�Ĺ����c�����ƣ�Խ�^�D(zhu��n)���c������늄әC�M�벻��(w��n)���^(q��)�� 3.2 PWM׃�l��-늄әCϵ�y(t��ng)����1.��Simulink��PWM׃�l��-늄әCϵ�y(t��ng)����ģ�͵Ľ��� ģ�������ཻ���Դģ�K���ɂ�ͨ�Ø�ģ�K��Universal Bridge�����{(di��o)������PWM Generator����늸�L2�����C1����������늄әCģ�K��Asynchronous Machine SI Units���Լ�늙C�y��(Machines Measurement Demux)�M�ɡ� �����·�����ཻ���ͨ�^��ͨ�Ø�ģ�K��Universal Bridge���M�ɵ�������Ԫ����������(j��ng)�^늸С���ݞV�����õ�����ֱ��늡�ԓֱ��늽�(j��ng)�^�{(di��o)������PWM Generator�������µ���׃��Ԫ�o����늄әC��늣�������׃��ԪҲ����ͨ�Ø�ģ�K�M�ɣ��x��İ댧�w������IGBT��������Ԫ����׃��Ԫ�M����׃�l�������·���{(di��o)������PWM Generator���ஔ�ڿ��Ɔ�Ԫ����������늄әC��PWM׃�l����늵ķ���ģ����D3-3��ʾ��
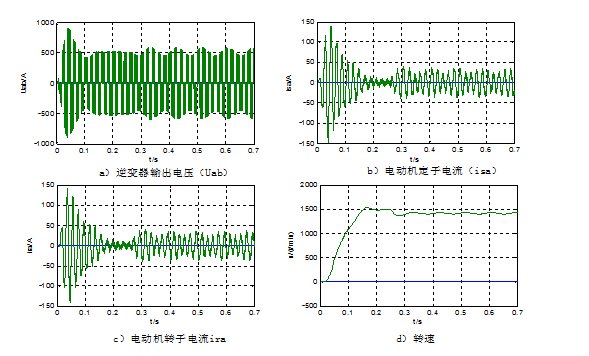
�D3-3PWM׃�l��-��������늄әCϵ�y(t��ng)����ģ�� 2.PWM׃�l��-늄әCϵ�y(t��ng)���沨�μ������ PWM׃�l��-늄әCϵ�y(t��ng)���沨����D3-4��ʾ���D3-4�քe���L����׃��ݔ��늉���늄әC���������늄әC�D(zhu��n)������Լ��D(zhu��n)�ٵ�׃�����Ρ� �D3-4 ��׃�����늄әC�������� �D3-4��a������׃��ݔ����늉�Uab�IJ��Σ�PWM�l(f��)�����o��׃���ṩ�(q��)����̖�������_�P��IGBT�Č�ͨ���Ķ�����Uabݔ�����Ρ� �D3-4��b������c���քe��늄әC����������D(zhu��n)����������d�����\�Еr���������� �r����������D(zhu��n)������ܴ��S��늄әC�u�u�_���~���D(zhu��n)�ٕr�����Ӻ��D(zhu��n)���������u�pС����t=0.15s�r������늄әC�D(zhu��n)���_�����d�D(zhu��n)�٣��˕r����������D(zhu��n)���������Сֵ������t=0.25s��ͨ�^�A�S��̖ģ�KTLͻ��ؓ�d�D(zhu��n)��45N��m������������D(zhu��n)�������ֵ�քe��u��������K�_����(w��n)����B(t��i)������������D(zhu��n)�����׃���ĸ���ԭ���ǣ����˾S�֮���늄әC�D(zhu��n)�ٵĺ㶨�ͷ�(w��n)���\�У����ʹ늙C�a(ch��n)����늴��D(zhu��n)�غ�ؓ�d�D(zhu��n)����ȣ��ɮ���늄әC�ĵ�ЧT��ģ�Ϳ�֪��늴��D(zhu��n)��Te�c������������D(zhu��n)������������Pϵ������ؓ�d�D(zhu��n)�صIJ���׃��ʹ�ö��Ӻ��D(zhu��n)������IJ���׃�����_ʼ�A�Σ�����늄әC�������D(zhu��n)���^��������������^���d�\�Еr��ؓ�d�D(zhu��n)�غ�С�������˴˕r���Ӻ��D(zhu��n)������^С��ͻ��ؓ�d��ؓ�d�D(zhu��n)�������������˶��Ӻ��D(zhu��n)�ӵ�����������@���҂��Ϳ����ˈD3-4(b)��(c)����������D(zhu��n)�������׃����r�� �D3-4��d���Ǯ���늄әC�Ŀ��d�����_���~���D(zhu��n)����ؓ�d�\�Еr�D(zhu��n)��׃����r���ɈD��֪������늄әC�Ŀ��d���ӣ��D(zhu��n)������ƽ��(w��n)����s��0.2s�r�_���~���D(zhu��n)�ټs��1500r/min����t=0.25sͻ��ؓ�d���D(zhu��n)���½����˕r늴��D(zhu��n)������������������D(zhu��n)�����Ҳ������������K����늄әC�D(zhu��n)���_����(w��n)����B(t��i)�������������ӣ�����һ�lֱ�����@��Ҫ����齻���Դ��(j��ng)����ģ�K�͞V����Ԫ�����ڞV������ȫ�����g���ڸ����C��������ݔ��ֱ��늲��δ��ڔ_����r�����������늉���SPWM��׃������PWM��׃���䮔�Դ���o��ݔ�����ο��Ը����c��
1
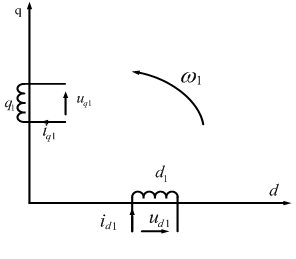
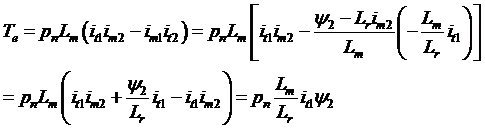
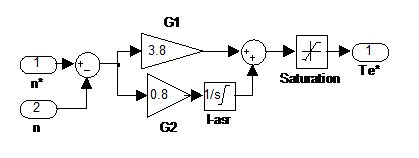
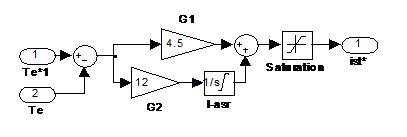
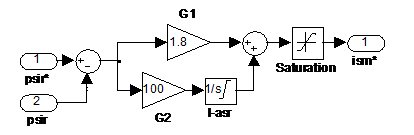
����������W���I(y��)�OӋ 4 ��������늄әCʸ�������{(di��o)��ϵ�y(t��ng)�������D(zhu��n)�Ӵ�朶���ʸ�����ƵĻ���˼����ͨ�^����׃�Q���ڰ��D(zhu��n)�Ӵ�朶���ͬ�����D(zhu��n)��������ϵ�У��õ���Ч��ֱ��늄әCģ�ͣ�����ֱ��늄әC�Ŀ��Ʒ���������늴��D(zhu��n)���c��朣�Ȼ���D(zhu��n)�Ӵ�朶�������ϵ�еĿ�����ͨ�^��׃�Q�õ���������ϵ�Č��������Ԍ�ʩ���ơ�����׃�Q����ʸ���������@�ӵ�����׃�QҲ�ɷQ��ʸ��׃�Q�������Ŀ���ϵ�y(t��ng)�Q��ʸ�����ƣ�Vector Control��VC��ϵ�y(t��ng)���D(zhu��n)�Ӵ�朶�����ƣ�Flux Orientation��F(xi��n)OC��ϵ�y(t��ng)�� ������Ҫ�����D(zhu��n)��(n��i)�h(hu��n)���D(zhu��n)�ٺʹ���]�h(hu��n)����늄әCʸ������ϵ�y(t��ng)���D(zhu��n)���l�ʿ��ƵĮ���늄әCʸ������ϵ�y(t��ng)�Լ��o�ٶȂ�������ʸ������ϵ�y(t��ng)���棬��ͨ�^��׃ģ�ͅ���(sh��)���^�ͷ�����������늄әCʸ�������{(di��o)��ϵ�y(t��ng)�����ԣ��ӏ�����������늄әCʸ������ϵ�y(t��ng)�����⡣ 4.1 �D(zhu��n)��(n��i)�h(hu��n)���D(zhu��n)�١�����]�h(hu��n)ʸ������ϵ�y(t��ng)���漰�������D(zhu��n)��(n��i)�h(hu��n)���D(zhu��n)�١�����]�h(hu��n)ʸ������ϵ�y(t��ng)���·����������h(hu��n)��������׃�����ڿ����·�У����D(zhu��n)�٭h(hu��n)���������D(zhu��n)�ؿ��ƃ�(n��i)�h(hu��n)���D(zhu��n)���{(di��o)��(ji��)��ASR��ݔ�����D(zhu��n)���{(di��o)��(ji��)��ATR�Ľo��  �����D(zhu��n)�صķ�����̖  ���tͨ�^ʸ�����Ʒ���Ӌ��õ����·�д���{(di��o)��(ji��)��ApsiR����늄әC���Ӵ�朵Ŀ��ƣ����O�������׃�Q�ʹ���^�y�h(hu��n)��(ji��)��ATR��ApsiR��ݔ���քe�Ƕ��Ӵ�朵Ŀ��ƣ����O�������׃�Q�ʹ���^�y�h(hu��n)��(ji��)��ATR��APsiR��ݔ���քe�Ƕ���������D(zhu��n)�ط���  �̈́�ŷ���  �� �� ��(j��ng)�^2r/3s׃�Q��õ����ඨ������Ľo��ֵ  ��  ��  ����ͨ�^������h(hu��n)����PWM��׃������늄әC���ӵ���������� 1.���D(zhu��n)��(n��i)�h(hu��n)�D(zhu��n)�١�����]�h(hu��n)����ϵ�y(t��ng)����ģ�� �ڎ��D(zhu��n)��(n��i)�h(hu��n)�D(zhu��n)�١�����]�h(hu��n)����ϵ�y(t��ng)����ģ���У�����220V���ཻ���Դ���ɂ�ͨ�Ø�ģ�K��Universal Bridge�����{(di��o)������PWM Generator����늸�L2�����C1����������늄әCģ�K��Asynchronous Machine SI Units���Լ�늙C�y��(Machines Measurement Demux)�M����ģ�͵����·����׃�����(q��)����̖�ɜ��h(hu��n)�}�_�l(f��)�����a(ch��n)���������{(di��o)��(ji��)��ASR��ATR��ApsiR�ǎ�ݔ������PI�{(di��o)��(ji��)����Ҋ�D4-2~�D4-4�����D(zhu��n)�Ӵ���^�yʹ�Ã���ͬ�����D(zhu��n)����ϵ�ϵĴ��ģ�ͣ�Current model��������(sh��)ģ�KFcn����Ӌ���D(zhu��n)�أ��������D(zhu��n)����ϵ/�����oֹ����ϵ׃�Qģ�K��dq0-to-abc�����F(xi��n)��ʸ�������е�2r/3s������׃�Q�����D(zhu��n)��(n��i)�h(hu��n)�D(zhu��n)�١�����]�h(hu��n)����ϵ�y(t��ng)����ģ����D4-1��ʾ�� 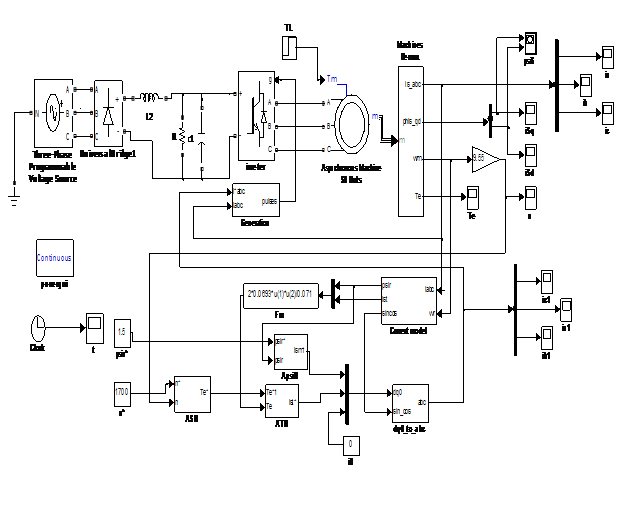 �D4-1 ���D(zhu��n)��(n��i)�h(hu��n)���D(zhu��n)�١�����]�h(hu��n)��ʸ������ϵ�y(t��ng)����ģ�� ASR���D(zhu��n)���{(di��o)��(ji��)����ATR���D(zhu��n)���{(di��o)��(ji��)����ApsiR�����{(di��o)��(ji��)���������{(di��o)��(ji��)���Y(ji��)��(g��u)��ͬ��ֻ�ǃ�(n��i)������(sh��)�O�ò�ͬ����ݔ������PI�{(di��o)��(ji��)��ASR��ATR��ApsiR�������ģ�K��Saturation��������Ҫ������������̖�ķ�����ʹ��̖׃���ڷ��ό��HҪ��ķ���֮��(n��i)��ASR���D(zhu��n)���{(di��o)��(ji��)����D4-2��ʾ��ATR���D(zhu��n)���{(di��o)��(ji��)����D4-3��ʾ��ApsiR�����{(di��o)��(ji��)����D4-4��ʾ�� �D4-2 ASR�{(di��o)��(ji��)���Y(ji��)��(g��u) �D4-3 ATR�{(di��o)��(ji��)���Y(ji��)��(g��u) �D4-4 ApsiR�{(di��o)��(ji��)���Y(ji��)��(g��u) 2.����ģ�ͅ���(sh��)�O�� 늄әC����(sh��)ͬ��3-1����늄әC����ģ�ͅ���(sh��)���O����ģ�ͷ����㷨��ode23tb��ode23tb������-�������ĵ�һ�A�������η����ڶ��A���ö��A��backward differentiation formulas�㷨�����ڷ���ģ���в������p�]�h(hu��n)�Ŀ��Ʒ�ʽ��ϵ�y(t��ng)���_�������^������˲���ԓ�㷨�����ڲ�Ӱ�ϵ�y(t��ng)���ȵ�ǰ���£��^��Ѹ�ٵصó�����Y(ji��)�����ڷ���ģ���У��o���D(zhu��n)�ٞ�1400r/min�����d���ӣ���0.6s�rͻ��ؓ�d60N��m��ASR��ATR��ApsiR�{(di��o)��(ji��)������(sh��)���4-1��ʾ�� ��4-1 �{(di��o)��(ji��)������(sh��)����ֵ | | | | �{(di��o)��(ji��)��ݔ���� | | | | | �D(zhu��n)���{(di��o)��(ji��)��ASR | | | | | | | �D(zhu��n)���{(di��o)��(ji��)��ATR | | | | | | | ����{(di��o)��(ji��)��ApsiR | | | | | | |
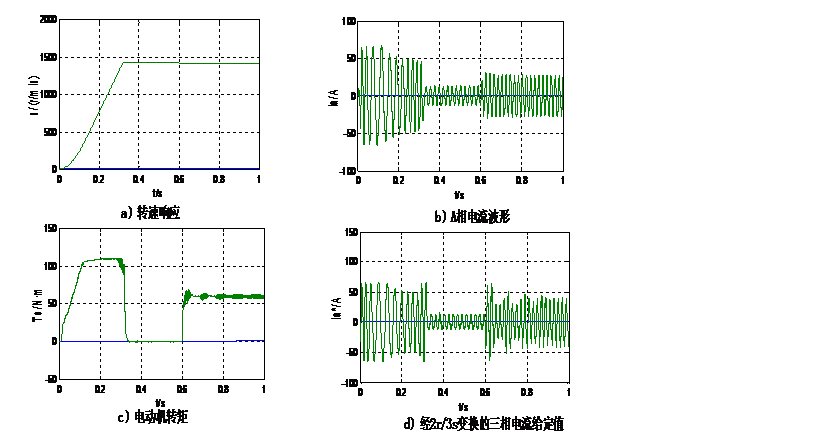
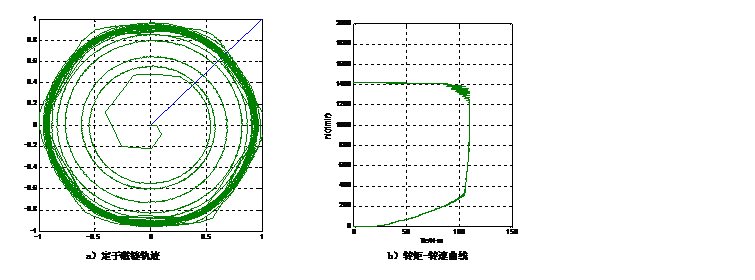
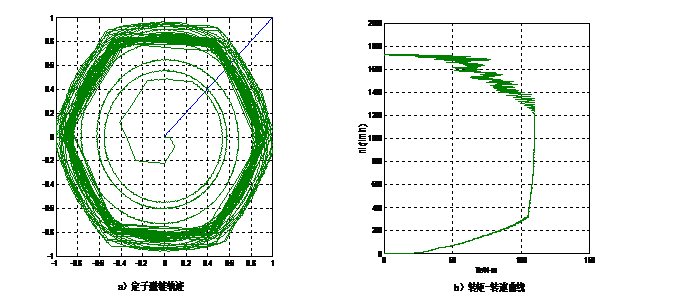
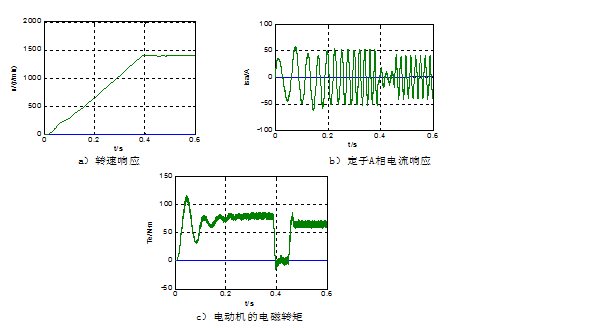
3.����ݔ�����μ����� ��1���ڽo���D(zhu��n)��  =1400r/min�r��ϵ�y(t��ng)���沨����D4-5��4-6��ʾ�� �D4-5��a�����D(zhu��n)��(n��i)�h(hu��n)�D(zhu��n)�ٺʹ���]�h(hu��n)����ϵ�y(t��ng)�ڽo���D(zhu��n)�� =1400r/min�r���D(zhu��n)��푑����IJ����п��Կ�������ʸ�������£��������A�Σ��D(zhu��n)������ƽ��(w��n)����t=0.35s�_���o���D(zhu��n)�٣��˕r����d��B(t��i)�µ��D(zhu��n)�٣���t=0.6s�r���o늙C��ؓ�d��TL=60N��m��늄әC�D(zhu��n)�������½��� �D4-5  =1400r/min�r���D(zhu��n)��(n��i)�h(hu��n)���D(zhu��n)�ٺʹ���]�h(hu��n)ʸ������ϵ�y(t��ng)���沨�� �D4-5��c���鮐��늄әC�D(zhu��n)�ز��Σ����d���ӕr�������D(zhu��n)���^���@�r늄әC�a(ch��n)���^���늴��D(zhu��n)�أ�ʹ�î���늄әC�Ķ������Ҳ���^�����ӽY(ji��)�����d�D(zhu��n)�ٽӽ�ͬ���D(zhu��n)�٣��˕rؓ�d�D(zhu��n)�غ�С�ӽ���0����t=0.6s�r������ؓ�d���D(zhu��n)�ٲ���ͻ׃��늴��D(zhu��n)�����ӣ�늴��D(zhu��n)��Te���Ƶ���ؓ�d�D(zhu��n)��60Nm���������÷��沨���c��Փ�Ϸ����IJ��λ���һ�¡� �D4-5��b����A�ඨ��������D4-5��d����(j��ng)�^2r/3s׃�Q��A������o��ֵ�����^���߲��ο�֪�^��o��ֵ  �͜y��ֵ  ���ο�֪�����߲��ν�����ͬ���� ����ʼ�K���@�� ֵ��Ҏ(gu��)���ķ�����(n��i)���ӡ��������^���У����ڶ���������D(zhu��n)�غ̈́�ŷ��������ֲ�׃����������Ľo��ֵ ��  ��  Ҳ��׃�������������^���У���������������ֲ�׃�����F(xi��n)��������ӣ���t=0.35s�r���˕r늄әC�_�����d��B(t��i)�µ��~���D(zhu��n)�٣������Ԯ���늄әCT�͵�Ч�·�еĄ��֧·�r����  ������t=0.35s��t=0.6s�r����늄әC���d�\�У�����A�ඨ�����iaֵ���^С��t=0.6s����ؓ�dTL=60N��m��늴��D(zhu��n)�����������Ҳ�S֮���� =1400r/min�r���D(zhu��n)��(n��i)�h(hu��n)���D(zhu��n)�١�����]�h(hu��n)ʸ������ϵ�y(t��ng)�Ю���늄әC���Ӵ��܉�E���D(zhu��n)��-�D(zhu��n)��������D4-6��ʾ�� �D4-6 =1400r/min�rϵ�y(t��ng)���沨�� �D4-6��a������b���քe�鮐��늄әC���Ӵ��܉�E���D(zhu��n)��-�D(zhu��n)�����������^���߲��ο��Կ������������A�Σ��ň������^�̱��^ƽ������朳����������ӣ���K�γɈA�����ň���ͬ�r늄әC�D(zhu��n)��Ҳ�����������@��ه�ڴ���]�h(hu��n)ʸ�����Ʒ�ʽ�����á�������늄әC�D(zhu��n)�Ӵ�朰l(f��)�����ӕr��늴��D(zhu��n)�ز��Ƿ�(w��n)���ģ�늄әC�D(zhu��n)��Ҳ�ܵ�Ӱ푡��˕r���D(zhu��n)�Ӵ���{(di��o)��(ji��)�����Dʹ�D(zhu��n)�Ӵ�机㶨�����D(zhu��n)���{(di��o)��(ji��)���t�{(di��o)��(ji��)����D(zhu��n)�ط������Ե����D(zhu��n)�Ӵ�朵�׃����늴��D(zhu��n)�ص�Ӱ푣�����_��ƽ���B(t��i)�� ��2���ڽo���D(zhu��n)�� =1700r/min�r������ݔ������ =1700r/min�r�]�h(hu��n)ʸ������ϵ�y(t��ng)���沨����D4-7��4-8��ʾ�� �D4-7 =1700r/min�rϵ�y(t��ng)���沨�� �D4-7��4-8ϵ�y(t��ng)���沨�ο��w�Ϻ͈D4-5��4-6��£��o��ֵ =30*  /  ��ͨ�^��׃�D(zhu��n)�ٽo�� ������׃�D(zhu��n)�ӽ��ٶȽo��ֵ ���D4-7��a�����D(zhu��n)��(n��i)�h(hu��n)�D(zhu��n)�ٺʹ���]�h(hu��n)����ϵ�y(t��ng)�ڽo���D(zhu��n)�� =1700r/min�r���D(zhu��n)��푑����IJ����п��Կ�������ʸ�������£��������A�Σ��D(zhu��n)������ƽ��(w��n)����t=0.4s�r�����d��B(t��i)�µ��D(zhu��n)�ٽӽ��o���D(zhu��n)�� =1700r/min����t=0.6s�r���o늙C��ؓ�d��TL=60N��m��늄әC�D(zhu��n)�������½��� �D4-7��b����A�ඨ��������D4-7��d����(j��ng)�^2r/3s׃�Q��A������o��ֵ�����^���߲��ο�֪�^��o��ֵ �͜y��ֵ ���ο�֪�����߲��ν�����ͬ���� ����ʼ�K���@�� ֵ��Ҏ(gu��)���ķ�����(n��i)���ӡ��������^���У����ڶ���������D(zhu��n)�غ̈́�ŷ��������ֲ�׃����������Ľo��ֵ �� �� Ҳ��׃�������������^���У���������������ֲ�׃�����F(xi��n)��������ӣ���t=0.4s�r���˕r늄әC�_�����d��B(t��i)�µ��~���D(zhu��n)�٣������Ԯ���늄әCT�͵�Ч�·�еĄ��֧·�r���� ������t=0.4s��t=0.6s�r����늄әC���d�\�У�����A�ඨ�����iaֵ���^С��t=0.6s����ؓ�dTL=60N��m��늴��D(zhu��n)�����������Ҳ�S֮���� �D4-7��c���鮐��늄әC�D(zhu��n)�ز��Σ����d���ӕr�������D(zhu��n)���^���@�r늄әC�a(ch��n)���^���늴��D(zhu��n)�أ�ʹ�î���늄әC�Ķ������Ҳ���^�����ӽY(ji��)�����d�D(zhu��n)�ٽӽ�ͬ���D(zhu��n)�٣��˕rؓ�d�D(zhu��n)�غ�С�ӽ���0����t=0.6s�r������ؓ�d���D(zhu��n)�ٲ���ͻ׃��늴��D(zhu��n)�����ӣ�늴��D(zhu��n)��Te���Ƶ���ؓ�d�D(zhu��n)��60N��m�� =1700r/min�r���D(zhu��n)��(n��i)�h(hu��n)���D(zhu��n)�١�����]�h(hu��n)ʸ������ϵ�y(t��ng)�Ю���늄әC���Ӵ��܉�E���D(zhu��n)��-�D(zhu��n)��������D4-8��ʾ�� �D4-8 =1700r/min�rϵ�y(t��ng)����Y(ji��)�� �D4-8��a������b���քe�� =1700r/min����늄әC���Ӵ��܉�E���D(zhu��n)��-�D(zhu��n)�����������^���߲��ο��Կ������������A�Σ��ň������^�̱��^ƽ������朳����������ӣ���K�γɽ�����߅�ε����D(zhu��n)�ň���ͬ�r늄әC�D(zhu��n)��Ҳ�����������@��ه�ڴ���]�h(hu��n)ʸ�����Ʒ�ʽ�����á����^�D4-8��a���͈D4-6��a��֪���D4-6��a�������D(zhu��n)�ň����ӽӽ��A�Σ��@�����D4-8��a����PWM�_�P�l���O��ֵ�^�ͣ���PWM�_�P�l��Խ�����D(zhu��n)�ň�Խ�ӽ���A�������ڌ��H��r�����PWM�_�P�l�ʣ������ڽ����A�����D(zhu��n)�ň��� ͨ�^���^ =1400r/min�� =1700r/min�l���£����D(zhu��n)��(n��i)�h(hu��n)���D(zhu��n)�ٺʹ���]�h(hu��n)ʸ������ϵ�y(t��ng)����Y(ji��)�����҂�����֪�����ڃɷN�l���£����H������ܿ��ٵĸ��S�o��ֵ����ְl(f��)�]���]�h(hu��n)���Ƶă�(y��u)Խ�ԡ�������(j��)����늄әCʸ��׃�Q����Чֱ��늄әCģ�Ϳ�֪���D(zhu��n)�Ӵ�朶���?q��)��F(xi��n)�˶���������D(zhu��n)�ط����̈́�ŷ����Ľ���D(zhu��n)�ӵĽ��ٶ���Ҫ�ܶ���������D(zhu��n)�ط���  ���ơ���������]�h(hu��n)���ƣ�ͨ�^��׃�D(zhu��n)�ӽ��ٶȵĽo��ֵ  ��ͨ�^�����h(hu��n)��(ji��)���Ԍ��F(xi��n)����������D(zhu��n)�ط��� �Ŀ��ơ���ϵ�y(t��ng)�ܵ��_�ӕr����������D(zhu��n)�ط��� �mȻ�l(f��)��׃�����������ڷ����h(hu��n)��(ji��)�����ã� �܉�ܿ�Ļ֏͵��_��֮ǰ�Ġ�B(t��i)�� �v�^�D4-4���D(zhu��n)��(n��i)�h(hu��n)���D(zhu��n)�ٺʹ���]�h(hu��n)��ʸ������ϵ�y(t��ng)����ģ�ͣ��D(zhu��n)�ٽo�� ͨ�^�D(zhu��n)���{(di��o)��(ji��)����ASR���õ��D(zhu��n)���{(di��o)��(ji��)����ATR���Ľo���D(zhu��n)��  ��������ģ�����������D(zhu��n)��(n��i)�h(hu��n)�� ��ʸ�����Ʒ���Ӌ����ķ�����̖  ���D(zhu��n)���{(di��o)��(ji��)����ATR�������ã��ó�����������D(zhu��n)�ط����o��ֵ  ���D(zhu��n)��(n��i)�h(hu��n)�������ǣ����D(zhu��n)�Ӵ�朰l(f��)�����ӕr��ͨ�^�D(zhu��n)���{(di��o)��(ji��)�����r�{(di��o)������D(zhu��n)�ط����Ľo��ֵ���Ե������׃����Ӱ푣��M���ܲ�Ӱ푻�����Ӱ�늄әC�D(zhu��n)�١���һ���棬�D(zhu��n)�Ӵ�朽o��ֵ��  �cͨ�^�D(zhu��n)�Ӵ�朶����D(zhu��n)�Ӵ�����ģ�͵ó����D(zhu��n)�Ӵ��  ���^����(j��ng)�^�D(zhu��n)�Ӵ���{(di��o)��(ji��)��ApisR���ó��������Ą�ŷ���  ������{(di��o)��(ji��)�������ǣ����Dʹ�D(zhu��n)�Ӵ�机㶨��ATR��APsiR��ݔ���քe�Ƕ���������D(zhu��n)�ط��� �̈́�ŷ��� �� �� ��(j��ng)�^2r/3s׃�Q��õ����ඨ������Ľo��ֵ �� �� ����ͨ�^������h(hu��n)����PWM��׃������늄әC���ӵ���������� 1.�D(zhu��n)���l�ʿ��Ʈ���늄әCʸ������ϵ�y(t��ng)�Ĺ���ԭ�� ���Ͻ�B�Ĵ���]�h(hu��n)���Ƶ�ʸ������ϵ�y(t��ng)�У���朷�ֵ��λ����̖���ɴ��ģ��Ӌ��õ�������늙C����(sh��)  ��  ׃����Ӱ푣���ɿ���ϵ�y(t��ng)�IJ����ʴ_�ԡ����ô���_�h(hu��n)�Ŀ��Ʒ�ʽ���o���D(zhu��n)�Ӵ�朷�ֵ��������ʸ��׃�Q���ԣ���Ȼ��Ҫ�D(zhu��n)�Ӵ�朵�λ����̖���D(zhu��n)�Ӵ�朵�Ӌ����Ȼ���ɱ��⡣������ýo��ֵ�g��Ӌ���D(zhu��n)�Ӵ�朵�λ�ã��ɺ���ϵ�y(t��ng)�Y(ji��)��(g��u)���@�N�����Q���g�Ӷ����g�Ӷ����ʸ������ϵ�y(t��ng)������ʸ�����Ʒ������D(zhu��n)�ʽ����(g��u)���D(zhu��n)���͵�ʸ������ϵ�y(t��ng)�� �D(zhu��n)�ٲ�ȡ���D(zhu��n)���l�ʿ��ƣ�������늄әC���ӽ��l��  ���D(zhu��n)�ӽ��l��  �M�ɣ� = +  �����@�����D(zhu��n)��׃���^���У�늄әC��������l��ʼ�K���S�D(zhu��n)�ӵČ��H�D(zhu��n)��ͬ��������ʹ�D(zhu��n)���{(di��o)��(ji��)����ƽ���� ��ʸ�����Ʒ����п��Կ������ڱ����D(zhu��n)�Ӵ��  ��׃�Ŀ����£�늄әC�D(zhu��n)��ֱ���ն���������D(zhu��n)�ط���  ���ƣ������D(zhu��n)�� ����ͨ�^��������D(zhu��n)�ط��� Ӌ�㣬�D(zhu��n)�Ӵ��  Ҳ����ͨ�^��������Ą�ŷ���  ��Ӌ�㡣��ϵ�y(t��ng)�����D(zhu��n)���{(di��o)��(ji��)��ASR��ݔ���鶨��������D(zhu��n)�ط��� ����ͨ�^Ӌ��õ� ��������ô�ͨ��׃���ƣ��tp ��0���� ��  ��  �� ����ʸ�����Ʒ����õ����Ƕ�������Ą�ŷ������D(zhu��n)�ط���������ϵ�y(t��ng)������늉�����׃������Ҫ�����Č���������D(zhu��n)�Q��늉����ƣ���׃�Q�Pϵ�飺 ʽ�У�  ��  �鶨��늉��Ą�ŷ������D(zhu��n)�ط�����  ��©��ϵ��(sh��)��  �� �� ��(j��ng)�^�������D(zhu��n)����ϵ/�����oֹ����ϵ��׃�Q(2r/3s)���õ�SPWM��׃��������늉�������̖����������׃����ݔ��늉��� 2.�D(zhu��n)���l�ʿ��Ʈ���늄әCʸ������ϵ�y(t��ng)����(sh��)�O�ü����� �D(zhu��n)���l�ʿ��Ʈ���늄әCʸ������ϵ�y(t��ng)����ģ����D4-9��ʾ��
�D4-9 �D(zhu��n)���l�ʿ��Ƶ�ʸ������ϵ�y(t��ng)����ģ�� ϵ�y(t��ng)�Ŀ��Ʋ����ɽo����PI�{(di��o)��(ji��)��������(sh��)�\�㡢����/��������׃�Q��PWM�}�_�l(f��)�����ȭh(hu��n)��(ji��)�M�ɡ����нo���h(hu��n)��(ji��)�ж��������ŷ���im*���D(zhu��n)���ٶ�n*���Ŵ���G1��G2�ͷe�����M�Ɏ������D(zhu��n)���{(di��o)��(ji��)��ASR.�����늉�ģ���D(zhu��n)�Q�ɺ���(sh��)Um*��Ut*ģ�K���F(xi��n)������(sh��)�\��ģ�Kws*����(j��)��������Ą�ŷ������D(zhu��n)�ط���Ӌ���D(zhu��n)��  �����c�D(zhu��n)���l��  ��ӵõ������l��  ���ٽ�(j��ng)�e�����õ�����늉�ʸ���D(zhu��n)��  ��ģ�Ksin��cos��dq0/abc���F(xi��n)�˃������D(zhu��n)����ϵ�������oֹ����ϵ׃�Q��dq0/abc��ݔ���rPWM�l(f��)�����������{(di��o)����̖������{(di��o)����̖���Ȳ��ܴ���1����dq0/abcݔ���������˥�p�h(hu��n)��(ji��)��PWM�l(f��)�����O�Þ��(n��i)��ģʽ��Ȼ���\��ģ�ͣ�����(j��)dq0/abcݔ����PWM�l(f��)�����������{(di��o)��ݔ����̖��ֵС��1��Ҫ��Ӌ��G4��˥�pϵ��(sh��)�����Ŵ����ą���(sh��)ȡֵҊ��4-2�� ��4-2 �D(zhu��n)���l��ʸ�����Ʒ���ģ�ͷŴ�������(sh��) �����˽o���D(zhu��n)�ٞ�1400r/min�r�Ŀ��d���ӵ��^�̣������Ӻ�0.45s���dTL=65N��m��ԓϵ�y(t��ng)�DZ��^���s��ϵ�y(t��ng)���Ք��Ƿ���Ӌ���н�(j��ng)�����F(xi��n)���}����(j��ng)ԇ�ø��NӋ�㷽�����x���˹̶����L�㷨ode5�����Lȡ  �� 3.�D(zhu��n)���l�ʿ��Ƶ�ʸ������ϵ�y(t��ng)���沨�μ������ �D(zhu��n)���l�ʿ��Ƶ�ʸ������ϵ�y(t��ng)���沨����D4-10��ʾ�� �D4-10 �D(zhu��n)���l��ʸ������ϵ�y(t��ng)����Y(ji��)�� �D4-10��a����늄әC���D(zhu��n)��푑����D4-10��b���Ƕ������A�����푑����D4-10��c���Ǯ���늄әC��늴��D(zhu��n)�غ�ؓ�d�D(zhu��n)�ؽo���� �D4-10��a����늄әC���D(zhu��n)��푑���늙C�������^���У��D(zhu��n)������ƽ��(w��n)���˕r����늄әC�a(ch��n)����늴��D(zhu��n)�ؽ��Ƶ��������D(zhu��n)�أ���������^��t=0.4s�r��늄әC�D(zhu��n)�ٷ�(w��n)���ڿ��d�\���D(zhu��n)���ϣ��˕r�D(zhu��n)�ٽӽ�ͬ���D(zhu��n)�٣��s1400r/min������늄әC�a(ch��n)����늴��D(zhu��n)���½�����d�D(zhu��n)�أ����ƞ��㣬�������Ҳ���^С����t=0.45s�ǣ�ͻ��ؓ�dTL=65N��m���˕r늴��D(zhu��n)���������D(zhu��n)�������½��������Ǻ����@��������K��(w��n)������ �D4-10��b���Ƕ������A�����푑��������^���У�����늴��D(zhu��n)�ؽ��Ƶ��������D(zhu��n)�أ������D(zhu��n)���^�Ķ�������������^������늄әC�Ķ�������^��ֵ�ӽ�50A����t=0.4s�r��늴��D(zhu��n)�ؽ��Ƶ��ڿ��d�D(zhu��n)�أ��dz�С�����ƞ��㣬�Ķ�ʹ��A�ඨ�������С���ӽ���0����t=0.45s�r��ͻ��ؓ�d�D(zhu��n)��TL=65N��m�����˾S��늄әC��(w��n)���\�У�늴��D(zhu��n)������������ؓ�d�D(zhu��n)�أ��@��Ҫ��������������Ԯa(ch��n)�������늴��D(zhu��n)�ء� �D4-10��c���Ǯ���늄әC��늴��D(zhu��n)�غ�ؓ�d�D(zhu��n)�ؽo������t=0�r�������D(zhu��n)���^���D(zhu��n)�����ֵ���^��100N��m����t<0.05s�r������늄әC̎�ڄ������Ӡ�B(t��i)�������D(zhu��n)�ز��ӱ��^����늄әC�\�в��Ǻ�ƽ��(w��n)�������F(xi��n)���ӵȲ���(w��n)���Ġ�r����0.05s< t<0.2s�r��늴��D(zhu��n)����(w��n)������(w��n)����70 N��m���ң���t=0.4s�r��늄әC̎�ڿ��d�\�Р�B(t��i)��ؓ�d�D(zhu��n)�ؽӽ���0��늴��D(zhu��n)��Ҳ�ӽ���0����t=0.45s�r��ͻ��ؓ�d�D(zhu��n)��TL=65N��m��ؓ�d�D(zhu��n)��ͻȻ������늴��D(zhu��n)��Ҳ���S�������˕r��늴��D(zhu��n)�ؽ��Ƶ���ؓ�d�D(zhu��n)�ؽo���� 4.3 �ɷNʸ������ϵ�y(t��ng)�����c�c���ڵĆ��}���ڎ��D(zhu��n)��(n��i)�h(hu��n)���D(zhu��n)�١�����]�h(hu��n)ʸ������ϵ�y(t��ng)���ڱ����������·����������h(hu��n)��������׃������Ӌ���D(zhu��n)�Ӵ�朵����ģ�Ͷ���Ҫ���y��������D(zhu��n)����̖���oՓ�D(zhu��n)�ٸߵ͕r�����m�ã�������늄әC����(sh��)Ӱ푡������ڌ��H��r�£�늄әC�������l��׃������Ӱ��D(zhu��n)�����  ����ͳ̶Ȍ�Ӱ�늸�  ��  ���@ЩӰ푶������´�朷�ֵ�cλ����̖ʧ�棬��������̖��ʧ���Ȼʹ����]�h(hu��n)����ϵ�y(t��ng)�����ܽ��ͣ��@�ǎ��D(zhu��n)��(n��i)�h(hu��n)���D(zhu��n)�١�����]�h(hu��n)ʸ������ϵ�y(t��ng)�IJ��㡣 ���ڴ���_�h(hu��n)�D(zhu��n)����ʸ������ϵ�y(t��ng)�Ĵň������ɴ�机�����D(zhu��n)�ط����o����̖�_������ʸ�����Ʒ����C�����]�д��ģ�͌��HӋ���D(zhu��n)�Ӵ�朼�����λ�����Ԍ����g�ӵĴň���������ʸ�����Ʒ����а�����늄әC�D(zhu��n)�Ӆ���(sh��)���������܅���(sh��)׃��Ӱ푣���机�����D(zhu��n)�ط����o��ֵ�c���Hֵ���ڲ����Ӱ�ϵ�y(t��ng)���ܡ� �C�Ͽɵã��ɷNʸ������ϵ�y(t��ng)���ڵĹ�ͬ���c�� ��1�����D(zhu��n)�Ӵ�朶����F(xi��n)���������ŷ������D(zhu��n)�ط����Ľ����Ҫ����]�h(hu��n)���ƣ� ��2���D(zhu��n)�Ӵ�朿�����ϵ�y(t��ng)�Ŀ��ƌ����Ƿ�(w��n)���đT�ԭh(hu��n)��(ji��)�����Բ��ô���]�h(hu��n)���ƣ�Ҳ���Բ����_�h(hu��n)���ƣ� ��3�������B�m(x��)��PI���ƣ��D(zhu��n)���c���׃��ƽ��(w��n)������]�h(hu��n)���ƿ���Ч�������Ƅ������ ͬ�r���ɷNʸ������ϵ�y(t��ng)Ҳ������һЩ��ͬ�Ć��}�� ��1���D(zhu��n)�Ӵ��Ӌ�㾫������׃�����D(zhu��n)������Ӱ푣��D(zhu��n)�Ӵ�朵ĽǶȾ���Ӱ푶���Ĝʴ_�ԣ�ʹ��ϵ�y(t��ng)���`��׃�� ��2����Ҫ�M��ʸ��׃�Q��ϵ�y(t��ng)�Y(ji��)��(g��u)���s���\������
�Y(ji��)Փ����ͨ�^��Simulink�h(hu��n)���½�����������늄әCʸ�����Ʒ���ģ�ͣ������о�����늄әC׃�l�{(di��o)�ٵĻ��A�����ĵ�һ���ǾwՓ���֣���Ҫ�ǽ�B���I(y��)�OӋ�о������Ϳ��w˼·���ڶ�����Ҫ��B�˻��ڄӑB(t��i)ģ�͵Į���늄әC�{(di��o)��ϵ�y(t��ng)����Փ���A���������nj���������늄әCʸ������ϵ�y(t��ng)�����ֆ�Ԫ�M�з��棬�����´��»��A���������ɷNʸ�������µ�׃�l�{(di��o)��ϵ�y(t��ng)�M�з��棬ͨ�^���挍��о���ϵ�y(t��ng)�����ܡ� ���挍�Y(ji��)��������ͨ�^ʸ��׃�Q������늙Cģ�͵����_�Ժ���Ч�ԡ�ϵ�y(t��ng)����������m��?sh��)��xȡ�{(di��o)��(ji��)����(sh��)�ͺ��m�ķ��慢��(sh��)�ͷ����㷨����ʹԓϵ�y(t��ng)�õ����õĄӑB(t��i)���ܣ����o��ֵ�������õĄӑB(t��i)��ۙ����������ϵ�y(t��ng)�ĸ������օf(xi��)�{(di��o)�\�У����F(xi��n)�˃�(y��u)�����@���˾����������ܵ��{(di��o)��ϵ�y(t��ng)��ͬ�rҲ���Կ�����ʸ�������ǿ��ƌW�ưl(f��)չ�v���е�һ�����µ��A�Ρ�Ŀǰ��ʸ�����Ƶ��о��c���ü���(j��ng)���뵽������I��ͬ�ӣ����İl(f��)չҲ�o늚����ϵ�y(t��ng)�Ŀ��Ʋ��Ԏ�������˼�롢�·�����SIMULINKܛ����ʸ�����ƽ����{(di��o)��ϵ�y(t��ng)�д_���郞(y��u)���������ܛ�����،��@�ø��V���đ��á� ͨ�^��������ՓӋ��ͷ��挍��о�֪�����F(xi��n)ʸ�����Ƶķ�������Ωһ�ģ����磬���ˌ��F(xi��n)�ň�������ƣ���Ҫ�y���D(zhu��n)�Ӵ�朵ķ�ֵ����λ������  ��늄әC��(n��i)������������ֱ�әz�y�ڼ��g���y�Ԍ��F(xi��n)����ˣ�������g���^�y�ķ��������z�y�c ���P��늄әC�\�Ѕ���(sh��)���綨��늉���������D(zhu��n)�ٵȣ�Ȼ�����(j��)늄әC�ĄӑB(t��i)��(sh��)�Wģ�ͣ�ͨ�^�\�㣬���rӋ���D(zhu��n)�Ӵ�朵ķ�ֵ����λ������Ҳ���Ը���(j��)ϵ�y(t��ng)�\�е�ָ��ֵ  �͙z�y�����D(zhu��n)��λ����̖���D(zhu��n)���ٶ���̖��ͨ�^Ӌ����� �ķ�ֵ����λ��ͬ�r�����܉�?q��)��H�y�����������IJ�ͬ�M�ϣ����Եõ���ͬ��ʽ�ĸ��������D(zhu��n)�Ӵ���^�yģ�͡�
���ϵ�Word��ʽ�ęn51�����d��ַ��
 ����matlab�Į���늙C׃�l�{(di��o)��ϵ�y(t��ng)���OӋ.doc
(1.43 MB, ���d��(sh��): 218)
����matlab�Į���늙C׃�l�{(di��o)��ϵ�y(t��ng)���OӋ.doc
(1.43 MB, ���d��(sh��): 218)
2018-9-3 16:14 �ς�
�c���ļ������d����
| 
 [����朽�]
[����朽�]

 ����TQQ:125739409;���g����QQȺ281945664
����TQQ:125739409;���g����QQȺ281945664











 �����d��
�����d��