|
ժ Ҫ �ڿ՚���|(zh��)�г��y(c��)���������������ܺã��r(ji��)�������ʹ�÷��㣬�ڬF(xi��n)��(ch��ng)�C(j��)���˶�λϵ�y(t��ng)��܇�v�Ԅ�(d��ng)��(d��o)����܇�v��ȫ����o��ϵ�y(t��ng)�����н�ͨ�������ٹ�·�����O(ji��n)�y(c��)ϵ�y(t��ng)���Լ��ӵ����;��͂}(c��ng)��(k��)����λ��̽�y(c��)�ж��Б�(y��ng)�á����ڳ������������ܸɔ_���������ľ������ڽ��|(zh��)�Ђ����ľ��x�^�h(yu��n)�����������(j��ng)�����ھ��x�Ĝy(c��)������y(c��)�����λ�y(c��)���ȶ�����ͨ�^(gu��)������(l��i)��(sh��)�F(xi��n)����ˣ������о������Įa(ch��n)���c����Ҏ(gu��)�ɡ��_(k��i)�l(f��)�����ܳ����Q���������հl(f��)�·����(du��)�ڳ����z�y(c��)���g(sh��)�İl(f��)չ����ʮ����Ҫ�ĬF(xi��n)��(sh��)���x�� ���O(sh��)Ӌ(j��)��B�˻��چ�Ƭ�C(j��)���Ƶij��y(c��)���ԭ������STC89C52���ƶ��r(sh��)���a(ch��n)��һ���l���}�_��Ӌ(j��)��İl(f��)�䵽���ջز��r(sh��)�g���Ķ��õ���(sh��)�y(c��)���x����(sh��)��(j��)̎�����ã�lcd1602�@ʾ���x��WTD588D�Z(y��)������(b��o)��
Ŀ�
ժ Ҫ Abstract ��һ�� �wՓ 1.1 �n�}�O(sh��)Ӌ(j��)Ŀ�ļ����x 1.1.1�O(sh��)Ӌ(j��)��Ŀ�� 1.1.2�O(sh��)Ӌ(j��)�����x 1.2 ��(gu��)��(n��i)���о���(d��ng)�B(t��i) 1.3 ���n�}�о�����Ҫ��(n��i)�� �ڶ��� ���w���� 2.1 �����x�� 2.2 �����y(c��)���x���O(sh��)Ӌ(j��)˼· 2.2.1 �����y(c��)��ԭ�� 2.2.2 �����y(c��)��ԭ����D 2.3 ʹ��Ԫ���x�� ������ ϵ�y(t��ng)��Ӳ���Y(ji��)��(g��u)�O(sh��)Ӌ(j��) 3.1 STC89C52��Ƭ�C(j��)�Ĺ��ܼ����c(di��n) 3.2��Ƭ�C(j��)��Сϵ�y(t��ng) 3.4 �Z(y��)������(b��o) 3.5 �@ʾ��Ԫ ������ ϵ�y(t��ng)��ܛ���O(sh��)Ӌ(j��) 4.1 ���������̈D 4.2 �����l(f��)���ӳ���ͳ��������Д���� �����³����y(c��)����� 5.1 HC-SR04ģ�K 5.2 T40��R40������������(ji��n)�� 5.2.1 �����������Ļ�����B 5.2.2 ��������������Ҫ��(y��ng)�� 5.2.3 �����������Ĺ���ԭ�� 5.3 �����l(f��)���· 5.4 ���������· 5.5 ���������^(gu��)�� 5.6 ���Ք�(sh��)��(j��)̎�� �����¿��Y(ji��) �� �x �����Y�� ���1ԭ��D ���2��ҪԴ����
��һ�� �wՓ 1.1 �n�}�O(sh��)Ӌ(j��)Ŀ�ļ����x 1.1.1�O(sh��)Ӌ(j��)��Ŀ�� �S���ƌW(xu��)���g(sh��)�Ŀ��ٰl(f��)չ�������ڜy(c��)���еđ�(y��ng)��Խ��(l��i)Խ�V������Ŀǰ�ļ���ˮƽ��(l��i)�f(shu��)���˂����Ծ��w���õĜy(c��)�༼�g(sh��)߀ʮ�����ޣ���ˣ��@��һ��(g��)������l(f��)չ�����Пo(w��)��ǰ���ļ��g(sh��)���a(ch��n)�I(y��)�I(l��ng)�����ڳ���ָ���ԏ�(qi��ng)���������ľ������ڽ��|(zh��)�Ђ����ľ��x�^�h(yu��n)����˳�����(j��ng)�����ھ��x�y(c��)�����糬���y(c��)�����λ�y(c��)���ȶ�����ͨ�^(gu��)������(l��i)��(sh��)�F(xi��n)�����ó����z�y(c��)�������^Ѹ�١����㡢Ӌ(j��)�㺆(ji��n)�Ρ�����������(sh��)�r(sh��)���ơ������о������ó������˂��ѽ�(j��ng)�O(sh��)Ӌ(j��)���Ƴ����S�೬���l(f��)���������ƾ��и��߶�λ���ȵı���(d��ng)�y(c��)���{���ԝM��ˮ��������(sh��)ʩȫ�[�ι����������^�m(x��)�l(f��)չ���õ��l���V�z�y(c��)�ĝ�ͧ��ק������{����(sh��)�F(xi��n)���h(yu��n)�̵ı���(d��ng)̽�y(c��)���R(sh��)�e�����Ƹ��m���cǰ߀�����ĝ�ͧ�{���e�ǽ�Q�\��ˮ��Ŀ��(bi��o)�R(sh��)�e��(w��n)�}���������͝�ͧ���������Ɲ�ͧ�{�Ĺ����h(hu��n)������ӹ���ɣ��o(w��)���ij����y(c��)�������Ԅ�(d��ng)�����ܻ���܉���c�����Ĝy(c��)���x���ɺ��ںϣ��γɶ��y(c��)�ࡣ�S���y(c��)���x�ļ��g(sh��)�M(j��n)�����y(c��)���x���ľ��Іμ��Д�ܰl(f��)չ�����ЌW(xu��)��(x��)���ܣ���K�l(f��)չ�����Є�(chu��ng)���������µ����o(j��)���òһ�µĜy(c��)���x���l(f��)�]��������á� 1.1.2�O(sh��)Ӌ(j��)�����x ���ڳ��y(c��)����һ�N�ǽ��|�z�y(c��)���g(sh��)�����ܹ⾀�����y(c��)��(du��)���ɫ�ȵ�Ӱ푣��^�����x�����l(w��i)�������ͳ��ۉm���ߜء����g���w�Ȑ��ӭh(hu��n)���������پS�o(h��)������Ⱦ���߿ɿ����L(zh��ng)���������c(di��n)�����Գ����y(c��)��ϵ�y(t��ng)��Ҫ��(y��ng)������܇�ĵ�܇?y��n)��_(d��)���C(j��)�����Ԅ�(d��ng)�������ߡ�����ʩ�������Լ�һЩ���I(y��)�F(xi��n)��(ch��ng)�е�Һλ��������M(j��n)�L(zh��ng)�Ȝy(c��)���Ȉ�(ch��ng)�ϡ�����о������y(c��)��ϵ�y(t��ng)�����ܴ�ĬF(xi��n)��(sh��)���x����(du��)���n�}���о��c�O(sh��)Ӌ(j��)��߀���M(j��n)һ������Լ����·�O(sh��)Ӌ(j��)ˮƽ�����댦(du��)��Ƭ�C(j��)������͑�(y��ng)�á� 1.2 ��(gu��)��(n��i)���о���(d��ng)�B(t��i) ��(gu��)������߳����y(c��)������˴������о�����(gu��)��(n��i)һЩ�W(xu��)��Ҳ�������P(gu��n)���о���Ŀǰ�����y(c��)�����Ҫ�����N����1����λ�z�y(c��)�������ȸߣ����z�y(c��)�������ޣ���2������ֵ�z�y(c��)�������ܷ��䲨��Ӱ푣���3����Խ�r(sh��)�g����������ʽ��(ji��n)�Σ�ֱ�^���F(xi��n)�ڌ�(du��)�����y(c��)��ľ�����Ҫȡ�Q�����y(c��)�ij�����ݔ�r(sh��)�g�ͳ����ڽ��|(zh��)�еĂ�ݔ�ٶȣ��������Ԃ�ݔ�r(sh��)�g�ľ���Ӱ��^�����Դ��īI(xi��n)���ý��͂�ݔ�r(sh��)�g�IJ��_���ȁ�(l��i)��ߜy(c��)�ྫ�ȡ��ضȌ�(du��)��������Ӱ�Ҳ�ܴ���ˣ���Ҫ�ÜضȂ������M(j��n)��У����Ŀǰ��λ̽�y(c��)�����V݆������������߽Y(ji��)������(l��i)�ķ�������Ҫ�Ľ���̽�y(c��)��ݔ���_���ȵķ����� 1.3 ���n�}�о�����Ҫ��(n��i)�� ������ָ�l�ʸ���20KHz�ęC(j��)е���������Գ�������z�y(c��)�ֶΣ���횮a(ch��n)���������ͽ��ճ���������@�N���ܵ��b�þ��dz����Q�����������������аl(f��)�����ͽ���������һ��(g��)�����Q����Ҳ�ɾ��аl(f��)�ͺͽ��������p�����á������Q���������É��Ч��(y��ng)��ԭ�팢��ܺͳ�����D(zhu��n)�������ڰl(f��)�䳬���ĕr(sh��)������D(zhu��n)�Q���l(f��)�䳬���������յ��ز��ĕr(sh��)�t�������(d��ng)�D(zhu��n)�Q�����̖(h��o)�� �����y(c��)���ԭ��һ����ö�Խ�r(sh��)�g��TOF��time of flight�������Ȝy(c��)�������İl(f��)�䵽�����ϵK�ﷵ������(j��ng)�v�ĕr(sh��)�g���ٳ��Գ������ٶȾ͵õ�������Դ�c�ϵK��֮�g�ľ��x���M��(y��ng)���������N���g(sh��)�� a����Ƭ�C(j��)���g(sh��)��STC89C52ϵ�еĆ�Ƭ�C(j��)�����w�eС�������p���Y(ji��)��(g��u)�^�麆(ji��n)�Σ��ɱ����������Ԍ�(sh��)�F(xi��n)һ��Ŀ��ƹ��ܵă�(y��u)�c(di��n)�����҆�Ƭ�C(j��)���m�Ñ�(y��ng)����С�͵�Ƕ��ʽϵ�y(t��ng)��������õ��ˏV���đ�(y��ng)�á��F(xi��n)������������Ӻ͙C(j��)е�a(ch��n)Ʒ�ж���(hu��)�����І�Ƭ�C(j��)�� b�������y(c��)�༼�g(sh��)�������y(c��)�༼�g(sh��)�cһ��y(c��)�༼�g(sh��)��ȣ����в������㡢ϵ�y(t��ng)��(ji��n)���Լ�Ӌ(j��)�㺆(ji��n)�εă�(y��u)�c(di��n)�� c���@ʾ���g(sh��)����(sh��)��(j��)̎������(sh��)�a���@ʾ�y(c��)���c���w֮�g�ľ��x�� d���Z(y��)��ģ�K���g(sh��)��ISD1730AоƬ��(l��i)�Z(y��)������(b��o)���x��
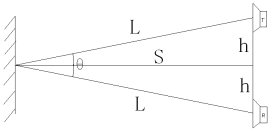
�ڶ��� ���w���� 2.1 �����x�� ���Æ�Ƭ�C(j��)��(l��i)���Ƴ����y(c��)�࣬��̖(h��o)���l(f��)�䵽�c�����l(f��)�������B����̖(h��o)�ˣ������l(f��)������ȶ�����l(f��)�䣬�ڰl(f��)���ͬ�r(sh��)�_(k��i)ʼӋ(j��)�r(sh��)�������ڿ՚��Ђ�����;�������ϵK��a(ch��n)���ز��� 2.2 �����y(c��)���x���O(sh��)Ӌ(j��)˼· 2.2.1 �����y(c��)��ԭ�� �����y(c��)��ķ����ж�N,����λ�z�y(c��)��������ֵ�z�y(c��)���Ͷ�Խ�r(sh��)�g�z�y(c��)���ȡ���λ�z�y(c��)���mȻ���ȸߣ����z�y(c��)�������ޣ�����ֵ�z�y(c��)�����ܷ��䲨��Ӱ푡� ���y(c��)��ϵ�y(t��ng)���ó�����Խ�r(sh��)�g�z�y(c��)������ԭ��飺�z�y(c��)�İl(f��)��������l(f��)��ij�����(j��ng)���w���|(zh��)���������Ղ������ĕr(sh��)�gt���@��(g��)�r(sh��)�g���Ƕ�Խ�r(sh��)�g��Ȼ��������xl���O(sh��)l��y(c��)�����x��t�������r(sh��)�g������Ă����ٶȞ�c���t��l(w��i)=ct/2�������������յ����䲨������ֹͣӋ(j��)�r(sh��)�����ɆΙC(j��)Ӌ(j��)������x���͔�(sh��)�a���@ʾ�y(c��)���Y(ji��)���� �����y(c��)����㷨�O(sh��)Ӌ(j��): �����ڿ՚��Ђ����ٶȞ�ÿ���340�ף�15��r(sh��)����t2�ǽ��ճ����r(sh��)�̣�t1�dz������l(f��)��r(sh��)�̣�t2-t1�ó�����һ��(g��)�r(sh��)�g��Ľ^��(du��)ֵ���ٶ�t2-t1=0.03S���t��340m��0.03S=10.2m���������@10.2m�ĕr(sh��)�g������l(f��)�������������ﷵ�صľ��x���£� ��D2-2-1��y(c��)��ԭ��[4] ��?y��n)�?2�Ƕ��^С,���Ժ��Բ�Ӌ(j��)������L��S�� �����l(f��)�������������ﷵ�صľ��x���£� L=C x ( t2 -t1 )/ 2 ���ڳ���Ҳ��һ�N��������c�c�՚�ض����P(gu��n)��һ���(l��i)�f(shu��)���ض�ÿ����1�z�϶ȣ�������0.6�ף��롣��2-1�г��ˎN�ض��µ��١�
��2-1 ���c�ضȵ��P(gu��n)ϵ��
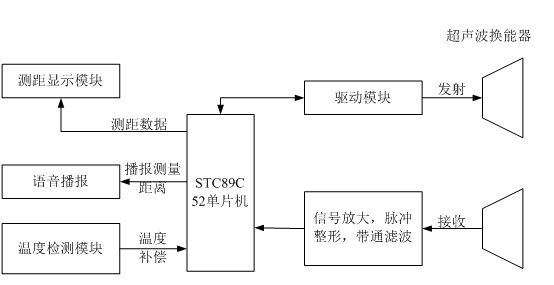
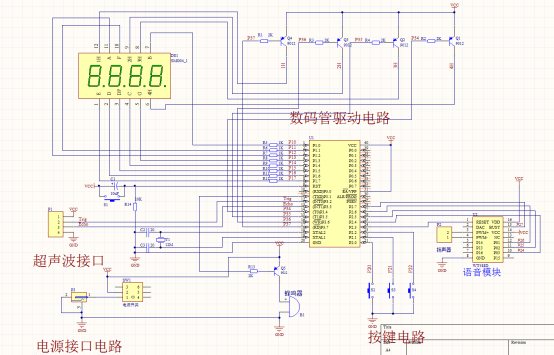
��ʹ�Õr(sh��)������ض�׃�����t���J(r��n)����c�ǻ�����׃�ģ�Ӌ(j��)��r(sh��)ȡc��340m/s������y(c��)�ྫ��Ҫ��ܸߣ��t��ͨ�^(gu��)��׃Ӳ���·���Ӝض��a(b��)���·�ķ���������Ӳ���·������׃����r��ͨ�^(gu��)ܛ�����M(j��n)�㷨�ķ�����(l��i)����У���� 2.2.2 �����y(c��)��ԭ����D �����y(c��)��ģ�K��HC-SR04���ضȂ�����ʹ��DS18B20��̎����ʹ��STC89C52��Ƭ�C(j��)���@ʾ���ֲ��ù��(y��ng)��(sh��)�a�ܡ�HC-SR04���ɵİl(f��)���·ģ�K�l(f��)�������������ϵK��a(ch��n)���ز����������·ģ�K���գ�STC89C52��Ƭ�C(j��)�y(t��ng)Ӌ(j��)������ݔ���Õr(sh��)�g����(j��ng)�^(gu��)�ض��a(b��)���أ�Ӌ(j��)������_�Ĵ��y(c��)���x��ͬ�r(sh��)ISD1730A����(j��)���P(gu��n)��(sh��)��(j��)̎���M(j��n)�нM�ϲ���(b��o)��(d��ng)ǰ�y(c��)ԇ���x�������ɔ�(sh��)�a���@ʾ�� | �D2-2 �����y(c��)��ϵ�y(t��ng)�Y(ji��)��(g��u)�D |
2.3 ʹ��Ԫ���x�����ڜy(c��)�����x�ľ��Ⱥ��L(zh��ng)��Ҫ���Ǻܸߣ������_(d��)��2cm���y(c��)�����x�_(d��)��2m���ɣ���˳���ģ�K�x�Ãr(ji��)������Ҍ�(sh��)�õ�HC-SR04���ɡ� ���ƺ��IJ����x��(sh��)�õ�STC89C52��Ƭ�C(j��)���ɝM��Ӌ(j��)��Ϳ���Ҫ�� �ض��a(b��)��?sh��)ĜضȂ������x���ձ��Ҍ�(sh��)�õ�DS18B20�� �Z(y��)������(b��o):ISD1730A���A�˾���Ƴ����Z(y��)��оƬ���Á�(l��i)����ѽ�(j��ng)ͣ�a(ch��n)��ISD1400 ϵ�м�ISD2500 ϵ��оƬ��ISD1730A���H������r(sh��)�g���и�����x��20�뵽240 �룩�������ڹ������^��14��25ϵ�е�����䛷Ź��ܣ���������һЩ�������Ի�����ʾ���ܼ���(du��)�惦(ch��)��ַ�ľ��_����������(j��)�҂���(j��ng)�I(y��ng) ISD ϵ��оƬ����Ľ�(j��ng)�(y��n)��(l��i)����ISD1700 �����|(zh��)Ҳ�^14��25ϵ�������@����� ISD1700 ϵ��оƬ���A�˾���Ƴ��Ć�Ƭ��(y��u)�|(zh��)�Z(y��)��䛷��·��ԓоƬ�ṩ���(xi��ng)�¹��ܣ�������(n��i)�Ì����Ķ���Ϣ����ϵ�y(t��ng)������Ϣ��ʾ��vAlert ��,�p�\(y��n)��ģʽ����(d��)��&Ƕ��ʽ�����Լ��ɶ��Ƶ���Ϣ����ָʾ��Ч��оƬ��(n��i)���������Ԅ�(d��ng)������ơ������L(f��ng)ǰ�ÔU(ku��)�������P(y��ng)���(q��)��(d��ng)��·����ʎ���c��(n��i) ��ȵ�ȫ��λ����ϵ�y(t��ng)���ܡ��� �@ʾ����:�x������λ��(sh��)�a�ܡ�
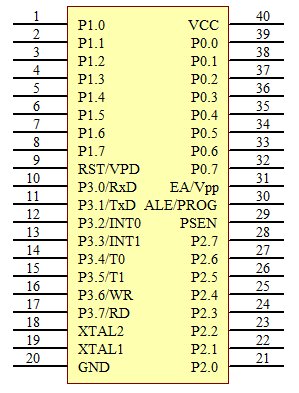
������ ϵ�y(t��ng)��Ӳ���Y(ji��)��(g��u)�O(sh��)Ӌ(j��) 3.1 STC89C52��Ƭ�C(j��)�Ĺ��ܼ����c(di��n) STC89C52��Ƭ�C(j��)�Ǻ꾧�Ƽ��Ƴ�����һ������/����/����(qi��ng)���ɔ_�Ć�Ƭ�C(j��)��ָ����a��ȫ���݂��y(t��ng) 8051 ��Ƭ�C(j��)��12 �r(sh��)�/�C(j��)�����ں� 6 �r(sh��)�/�C(j��)���� �ڿ��������x�� ��Ҫ�������£� ����(qi��ng)�� 8051 ��Ƭ�C(j��)��6 �r(sh��)�/�C(j��)�����ں� 12 �r(sh��)�/�C(j��)�����ڿ����� ���x��ָ����a��ȫ���݂��y(t��ng) 8051. ����늉���5.5V��3.3V��5V ��Ƭ�C(j��)��/3.8V��2.0V��3V ��Ƭ�C(j��)�� �����l�ʷ�����0��40MHz���ஔ(d��ng)����ͨ 8051 �� 0��80MHz����(sh��)�H�� ���l�ʿ��_(d��) 48MHz �Ñ���(y��ng)�ó�����g�� 8K �ֹ�(ji��) Ƭ�ϼ��� 512 �ֹ�(ji��) RAM ͨ�� I/O ��(32 ��(g��))��(f��)λ���:P1/P2/P3/P4 �ǜ�(zh��n)�p���/������,P0����©�O�_(k��i)·ݔ�������鿂���U(ku��)չ�Õr(sh��)�����ü�������裬���� I/O ���Õr(sh��)�����������衣 ISP����ϵ�y(t��ng)�ɾ��̣�/IAP���ڑ�(y��ng)�ÿɾ��̣� ���o(w��)�茣�þ��������o(w��) �茣�÷���������ͨ�^(gu��)���ڣ�RxD/P3.0,TxD/P3.1��ֱ�����d�Ñ��� ��(sh��)�뼴�����һƬ ���� EEPROM ���� ���п��T������ �� 3 ��(g��) 16 λ���r(sh��)��/Ӌ(j��)��(sh��)���������r(sh��)�� T0��T1��T2 �ⲿ�Д� 4 ·,�½����Д����ƽ�|�l(f��)�·��Power Down ģʽ�����ⲿ�Д���ƽ�|�l(f��)�Дʽ���� ͨ�î������пڣ�UART��,߀���ö��r(sh��)��ܛ����(sh��)�F(xi��n)����(g��)UART �����ضȷ�����-40��+85�棨���I(y��)��(j��)��/0��75�棨�̘I(y��)��(j��)�� STC89C52RC��Ƭ�C(j��)�Ĺ���ģʽ ���ģʽ��������<0.1��A,�����ⲿ�Д����ѣ��Д�غ��^�m(x��)��(zh��)��ԭ ����
���eģʽ�������� 2mA ������ ��������ģʽ�������� 4Ma��7mA ������ ���ģʽ�����ⲿ�Д����ѣ��m����ˮ���������늳ع��ϵ�y(t��ng)����y�O(sh��)��
STC89C52RC ���_�����f(shu��)�� VCC��40 ���_�����Դ늉� VSS��20 ���_�����ӵ� P0 �˿ڣ�P0.0��P0.7 P0.7��39��32 ���_�� ��P0����һ��(g��)©�O�_(k��i)·�� 8 λ�p�� I/O �ڡ�����ݔ���˿ڣ�ÿ��(g��)���_���(q��)��(d��ng) 8 ��(g��) TTL ؓ(f��)�d����(du��)�˿� P0 ���� ÿ��(g��)���_���(q��)��(d��ng) ���롰1���r(sh��)���� ��������迹ݔ�롣���L��(w��n)�ⲿ����͔�(sh��)��(j��)�惦(ch��)���r(sh��) ���L��(w��n)�ⲿ����͔�(sh��)��(j��)�惦(ch��)���r(sh��)��P0 ��Ҳ�����ṩ�� 8 λ ��ַ�� 8 λ��(sh��)��(j��)�ď�(f��)�ÿ��� λ��(sh��)��(j��)�ď�(f��)�ÿ������˕r(sh��)��P0 �ڃ�(n��i)�����������Ч���� Flash ROM���ڳ̕r(sh��)��P0 �˿ڽ���ָ���ֹ�(ji��) �˿ڽ���ָ���ֹ�(ji��)������У�(y��n)����r(sh��)���tݔ��ָ���ֹ�(ji��) �tݔ��ָ���ֹ�(ji��)���(y��n)�C�r(sh��)��Ҫ�����������衣 P1 �˿ڣ�P1.0��P1.7��1��8 ���_�� ��P1����һ��(g��)����(n��i)���������� 8 λ�p�� I/O �ڡ�P1 ��ݔ�����_�����(q��)��(d��ng)�����ջ���ݔ�������ʽ��4 ��(g��) TTL ݔ�롣��(du��)�� �ڌ��� 1 �r(sh��)��ͨ�^(gu��)��(n��i)�����������Ѷ˿��������λ���@�ǿ�����ݔ��ڡ�P1 ����ݔ���ʹ�Õr(sh��)����?y��n)��Ѓ?n��i)��������裬��Щ���ⲿ���͵����_��(hu��)ݔ��һ��(g��)� ���� �� �� ���⣬P1.0 �� P1.1 ߀�������鶨�r(sh��)��/Ӌ(j��)��(sh��)�� 2 ���ⲿ���g(sh��)ݔ�루P1.0/T2���Ͷ��r(sh��)��/Ӌ(j��)��(sh��)�� 2 ���|�l(f��)ݔ�루P1.1/T2EX�������w��Ҋ(ji��n)�±��� �ڌ�(du��) Flash ROM ���̺ͳ���У�(y��n)�r(sh��),P1���յ� 8 λ��ַ�� �� XX P1.0 �� P1.1���_��(f��)�ù��� P2 �˿ڣ�P2.0��P2.7��21��28 ���_�� ��P2 ����һ��(g��)����(n��i)���������� 8 λ�p�� I/O �˿ڡ�P2 ��ݔ�����_�������(q��)��(d��ng)�����ջ�ݔ�������ʽ��4��(g��)TTLݔ�롣��(du��)�˿ڌ��� 1 �r(sh��)��ͨ�^(gu��)��(n��i)�����������Ѷ˿��������ƽ���@�r(sh��)������ݔ��ڡ�P2 ����ݔ���ʹ�Õr(sh��)����?y��n)��Ѓ?n��i)����������裬��Щ���ⲿ��̖(h��o)���͵����_��(hu��) ݔ��һ��(g��)�����I�� �� ���L��(w��n)�ⲿ����惦(ch��)����16λ��ַ���ⲿ��(sh��)��(j��)�惦(ch��)�������(zh��)�С�MOVX @DPTR��ָ��r(sh��)��P2 �ͳ��� 8 λ��ַ�����L��(w��n) 8 λ��ַ���ⲿ��(sh��)��(j��)�惦(ch��)������ ��(zh��)�С�MOVX @R1��ָ��r(sh��)��P2�����_�ϵă�(n��i)�ݣ����nj��üĴ�����SFR���^(q��) �е� P2 �Ĵ����ă�(n��i)�ݣ���������(g��)�L��(w��n)���g����(hu��)��׃�� �ڌ�(du��) Flash ROM ���̺ͳ���У�(y��n)���g��P2Ҳ���ո�λ��ַ��һЩ������̖(h��o)�� P3 �˿ڣ�P3.0��P3.7��10��17 ���_�� ��P3 ��һ��(g��)����(n��i)���������� 8 λ�p�� I/O �˿ڡ�P3 ��ݔ�����_�����(q��)��(d��ng)�����ջ�ݔ�������ʽ��4 ��(g��) TTL ݔ�롣��(du��)�� �ڌ��� 1 �r(sh��)��ͨ�^(gu��)��(n��i)�����������Ѷ˿��������λ���@�r(sh��)������ݔ��ڡ�P3 ��ݔ���ʹ�Õr(sh��)����?y��n)��Ѓ?n��i)����������裬��Щ���ⲿ��̖(h��o)���͵����_��(hu��)ݔ��һ ��(g��)����� �� ��
�ڌ�(du��) Flash ROM ���̻����У�(y��n)�r(sh��)��P3 ߀����һЩ������̖(h��o)��
P3 �ڳ�����һ�� I/O ���⣬߀������һЩ��(f��)�ù��ܣ����±���ʾ�� ��XX P3�����_��(f��)�ù��� ��(f��)�ù��� RST��9 ���_�� ����(f��)λݔ�롣��(d��ng)ݔ���B�m(x��)�ɂ�(g��)�C(j��)���������ϸ��ƽ�r(sh��)����Ч���Á�(l��i)��Ɇ�Ƭ�C(j��)��Ƭ�C(j��)�ď�(f��)λ��ʼ�����������T��Ӌ(j��)�r(sh��)��ɺ�RST ���_ݔ�� 96 ��(g��)�������ڵĸ��ƽ������Ĵ��� AUXR����ַ 8EH���ϵ� DISRTO λ����ʹ�˹� �ܟo(w��)Ч��DISRTO Ĭ�J(r��n)��B(t��i)�£���(f��)λ���ƽ��Ч�� ALE/ ROG��30 ���_�� ��ַ�i�������̖(h��o) ����ALE�����L��(w��n)�ⲿ����惦(ch��)���r(sh��)�� �i��� 8 λ��ַ��ݔ���}�_���� Flash ���̕r(sh��)�������_�� ROG��Ҳ��������ݔ�� �}�_�� ��һ����r�£�ALE �Ծ�������֮һ�Ĺ̶��l��ݔ���}�_�����Á�(l��i)�����ⲿ ���r(sh��)����r(sh��)�ʹ�á�Ȼ�����e��(qi��ng)�{(di��o)����ÿ���L��(w��n)�ⲿ��(sh��)��(j��)�惦(ch��)���r(sh��)��ALE �}�_ ����(hu��)���^(gu��)�� �����Ҫ��ͨ�^(gu��)����ַλ 8EH �� SFR �ĵ� 0 λ�á�1����ALE �������o(w��)Ч���@ һλ�á�1����ALE �H�ڈ�(zh��)�� MOVX �� MOV ָ��r(sh��)��Ч����t��ALE �������� �ߡ��@��(g��) ALE ʹ�ܘ�(bi��o)־λ����ַλ 8EH �� SFR �ĵ� 0 λ�����O(sh��)�Ì�(du��)������̎�� �ⲿ��(zh��)��ģʽ�o(w��)Ч��
�ⲿ����惦(ch��)���xͨ��̖(h��o)��SEN�����ⲿ����惦(ch��)���x SEN��29���_��
ͨ��̖(h��o)����(d��ng) STC89C52RC ���ⲿ����惦(ch��)����(zh��)���ⲿ���a�r(sh��)��SEN��ÿ��(g��)�C(j��)���� �ڱ�����ɴΣ����L��(w��n)�ⲿ��(sh��)��(j��)�惦(ch��)���r(sh��)�� SEN���������A/VPP��31���_�� �L��(w��n)�ⲿ����惦(ch��)��������̖(h��o)����ʹ�� 0000H �� FFFFH ���ⲿ����惦(ch��)���xȡָ�A��횽� GND��ע����ܷ�ʽ 1 �r(sh��)�� A����(n��i)���i ��λ RESET�����ˈ�(zh��)�Ѓ�(n��i)������ָ� A��(y��ng)ԓ�� VCC���� Flash �������g�� AҲ���� 12 �� VPP 늉��� XTAL1��19 ���_�� ����ʎ������Ŵ����̓�(n��i)���r(sh��)犰l(f��)���·��ݔ��ˡ� XTAL2��18 ���_������ʎ������Ŵ�����ݔ��ˡ�
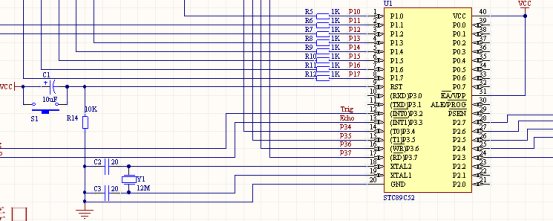
3.2��Ƭ�C(j��)��Сϵ�y(t��ng) ��Ƭ�C(j��)��Сϵ�y(t��ng),���߷Q����С��(y��ng)��ϵ�y(t��ng),��ָ�����ٵ�Ԫ���M�ɵĆ�Ƭ�C(j��)���Թ�����ϵ�y(t��ng).
��(du��)52ϵ�І�Ƭ�C(j��)��(l��i)�f(shu��),��Сϵ�y(t��ng)һ�㑪(y��ng)ԓ����:��Ƭ�C(j��)�������·����(f��)λ�·. ��Ƭ�C(j��)��Сϵ�y(t��ng)�·��B
52��Ƭ�C(j��)��Сϵ�y(t��ng)��(f��)λ�·�ĘO�����C1�Ĵ�Сֱ��Ӱ푆�Ƭ�C(j��)�ď�(f��)λ�r(sh��)�g��һ�����10~30uF��51��Ƭ�C(j��)��Сϵ�y(t��ng)��ֵԽ����Ҫ�ď�(f��)λ�r(sh��)�gԽ�̡�
52��Ƭ�C(j��)��Сϵ�y(t��ng)����Y1Ҳ���Բ���12MHz����������������r�¿��Բ��ø����l�ʵľ���51��Ƭ�C(j��)��Сϵ�y(t��ng)�������ʎ�l��ֱ��Ӱ푆�Ƭ�C(j��)��̎���ٶȣ��l��Խ��̎���ٶ�Խ�졣
52��Ƭ�C(j��)��Сϵ�y(t��ng)�������C2��C3һ�����15~33pF����������x����Խ��Խ�ã������x��Ƭ�C(j��)Խ��Խ��4.P0�ڞ��_(k��i)©ݔ��������ݔ���ڕr(sh��)���������裬��ֵһ���10k��
�O(sh��)�Þ鶨�r(sh��)��ģʽ�r(sh��)����1Ӌ(j��)��(sh��)���nj�(du��)��(n��i)���C(j��)������Ӌ(j��)��(sh��)��1��(g��)�C(j��)�����ڵ���12��(g��)��ʎ���ڣ���Ӌ(j��)��(sh��)�l�ʞ龧���l�ʵ�1/12����Ӌ(j��)��(sh��)ֵN���ԙC(j��)������Tcy���Ƕ��r(sh��)�r(sh��)�gt��
�O(sh��)�Þ�Ӌ(j��)��(sh��)��ģʽ�r(sh��)���ⲿ�¼�Ӌ(j��)��(sh��)�}�_��T0��T1���_ݔ�뵽Ӌ(j��)��(sh��)������ÿ��(g��)�C(j��)�����ڵ�S5P2���g�ɘ�T0��T1���_�ƽ����(d��ng)ij���ڲɘӵ�һ���ƽݔ�룬����һ�����ֲɘӵ�һ���ƽ�r(sh��)���tӋ(j��)��(sh��)����1�����µ�Ӌ(j��)��(sh��)ֵ����һ��(g��)�C(j��)�����ڵ�S3P1���g�b��Ӌ(j��)��(sh��)�������ڙz�y(c��)һ��(g��)��1��0���½�����Ҫ2��(g��)�C(j��)�����ڣ����Ҫ�ɘӵ��ƽ����Ҫ�S��һ��(g��)�C(j��)�����ڡ���(d��ng)�����l�ʞ�12MHz�r(sh��)�����Ӌ(j��)��(sh��)�l�ʲ����^(gu��)1/12MHz����Ӌ(j��)��(sh��)�}�_������Ҫ����2 ms�� | �D3-2��Ƭ�C(j��)��Сϵ�y(t��ng) |
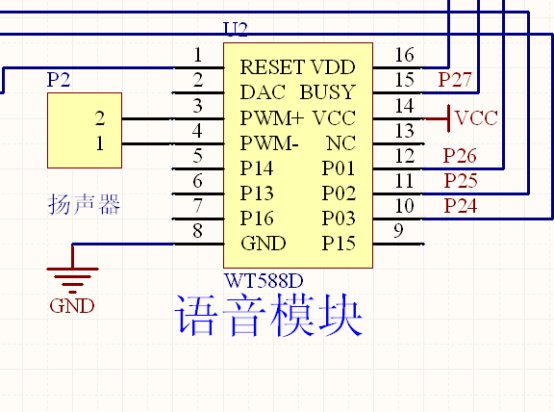
3.4 �Z(y��)������(b��o) �Z(y��)��ģ�K����WT588D�Z(y��)��ģ�K��WT588D�ǏV��Ψ��(chu��ng)�c�_(t��i)���A������аl(f��)��һ���Z(y��)��оƬ����Ƭ�C(j��)����WT588D���H��������һ���Z(y��)��оƬ����(d��ng)��Ƭ�l(f��)��������?y��n)�I/O�ڶ࣬�����ƹ��ܺ�����FLASH�惦(ch��)������������FLASH��Ƭ�C(j��)������Ҫ����߀������Ʒֱ��Ͷ��Ĥ�����_��ȫ���øĄ�(d��ng)���r(ji��)�X����һ�롣WT588D����Խ����(ji��n)�����ã��c51��Ƭ�C(j��)�����O�����Ƶ����ܡ�WT588D�Z(y��)��оƬ��һ���(qi��ng)��Ŀ��؏�(f��)�����������Z(y��)���Ƭ�C(j��)оƬ������WT588D VioceChip��λ�C(j��)����ܛ�����S����QWT588D�Z(y��)���Ƭ�C(j��)оƬ���κ�һ�N����ģʽ������Ϣ���d��SPI-Flash�ϼ��ɡ�ܛ��������ʽ��(ji��n)������������Z(y��)���M�ϼ��g(sh��)�����p�����Z(y��)�����ĕr(sh��)�g�� MP3����ģʽ�£���ȫӭ���Ј�(ch��ng)��MP3�IJ���/��ͣ��ֹͣ����һ������һ��������+������-�ȹ��ܣ� ���I����ģʽ���|�l(f��)��ʽ�`����S���O(sh��)�����ⰴ�I���}�_���؏�(f��)�|�l(f��)���}�_�����؏�(f��)�|�l(f��)���o(w��)Ч���I���ƽ���ֲ�ѭ�h(hu��n)���ƽ���ֿ�ѭ�h(hu��n)�����ƽ���ֿ�ѭ�h(hu��n)�����I��ǰ��ѭ�h(hu��n)�����I���ѭ�h(hu��n)�����I��ǰ��ѭ�h(hu��n)�����I����ѭ�h(hu��n)������+������-������/��ͣ��ֹͣ������/ֹͣ��15�N�|�l(f��)��ʽ�����ɿ���10��(g��)���I�|�l(f��)ݔ���� 3��8���I�M�Ͽ���ģʽ�������}�_���؏�(f��)�|�l(f��)�ķ�ʽ�|�l(f��)24��(g��)��ַλ�Z(y��)�������|�l(f��)��ַλ�Z(y��)������0��219֮�g�O(sh��)�ã����ڿ���ģʽ������8��(g��)I/O���M(j��n)�п��ƣ� һ�����ڿ���ģʽ��ͨ�^(gu��)�l(f��)�a�˿����Z(y��)�����š�ֹͣ��ѭ�h(hu��n)���ź�������С������ֱ���|�l(f��)0��219��ַλ�������Z(y��)�����l(f��)�a�ٶ�600us��2000us�� �������ڿ���ģʽ���������ڿ���I/O�ڔU(ku��)չݔ��ģʽ֮�g��ͨ�^(gu��)�l(f��)�a�ГQ���������ڿ���ģʽ�£��ܿ����Z(y��)�����š�ֹͣ��ѭ�h(hu��n)���ź�������С������ֱ���|�l(f��)0��219��ַλ�������Z(y��)�����������ڿ���I/O�ڔU(ku��)չݔ�����ԔU(ku��)չݔ��8λ���ڃɷNģʽ���ГQ������һ��(g��)ģʽ�����һ�N��B(t��i)�������M(j��n)����һ��(g��)ģʽ�� PWM��DACݔ����ʽ��PWMݔ����ֱ���Ƅ�(d��ng)0.5W/8���ēP(y��ng)����DACݔ����ӹ��ţ����|(zh��)�á� ��(y��ng)�÷����V���������漰�����е��Z(y��)���(ch��ng)�������(b��o)վ������(b��o)���������������[犡��W(xu��)��(x��)�C(j��)�����ܼ�늡��ί��x�������ߡ��Ӎ���Լ����N�Ԅ�(d��ng)�����b�õȈ�(ch��ng)������ˇ���_(d��)�����I(y��)��(y��ng)�õ�Ҫ��
WT588D�����ԣ� 1.���2M��32M��Flash���r(sh��)�g��32��1054�롣��Ĥ���(n��i)��ROM�����L(zh��ng)֧��400�루@6K�ɘӣ����ɘ���֧��6K��22K 2.DACݔ����13Bit��PWMݔ����12Bit 3.��(n��i)��0.5W���ţ���ֱ���Ƅ�(d��ng)0.5W/8���P(y��ng)�� 4.֧�ּ��dMP3/WAV/WMA���N���l��ʽ 5.����늉���DC2.8V��5.5V 6.�o�B(t��i)���������<10uA 7.��ͨ�^(gu��)��Xܛ�����S��M���Z(y��)�����ɲ����o����������o����ռ�Ã�(n��i)���������һ��(g��)�Ѽ��d�Z(y��)�����؏�(f��)�{(di��o)�õ�����(g��)��ַ���؏�(f��)�{(di��o)�õģ���ռ���g���@������оƬ�����߂�� 8.USB���d��ʽ��֧���ھ����d/ISP���d 9.7�N���Ʒ�ʽ�� MP3����ģʽ�����I����ģʽ��3��8��ꇿ���ģʽ�����ڿ���ģʽ��һ�����ڿ���ģʽ���������ڿ���ģʽ�Լ��������ڿ���I/O�ڔU(ku��)չݔ��ģʽ 10.��Ĥ��Ĺ��_�cԭ��(l��i)һ�£�����һ�ӣ����|(zh��)һ�ӡ����ø����·���Ҳ��ú���FLASH 11.���ɼ��d500���Z(y��)����210�οɿ��Ƶ�ַλ����(g��)��ַλ���ɼ��d128���Z(y��)������ַλ��(n��i)���Z(y��)���M�ϲ��ţ� 12.������o���r(sh��)�g����10ms��25min���o����ռ�ô惦(ch��)���g�� �Z(y��)����ʾģ�K�·�D��D17��ʾ
| �D3-3 �Z(y��)������(b��o)�· |
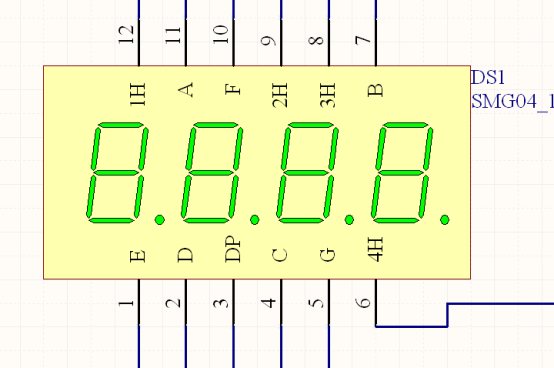
3.5 �@ʾ��Ԫ ���O(sh��)Ӌ(j��)�ڽ��ն˲��ֲ���LCD1602Һ���@ʾģ�K��(l��i)�@ʾ�ضȣ�,P1�������������(q��)��(d��ng)���������锵(sh��)��(j��)ݔ��������L(zh��ng)CD���(q��)��(d��ng)��P2�ڵ�P2.7-P2.6�քe����Һ���@ʾģ�K��ʹ����̖(h��o)E����(sh��)��(j��)/�����x��RS��R/W�˄t���óɌ������w�·��D2.11��ʾ��
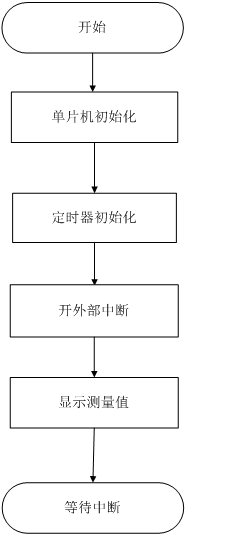
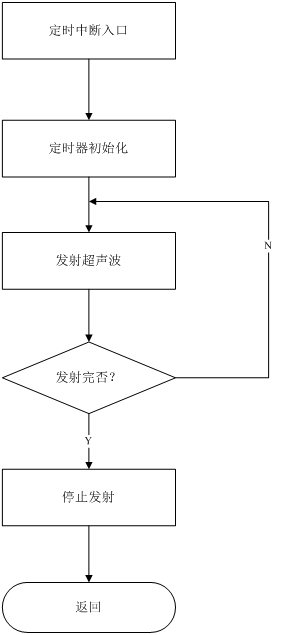
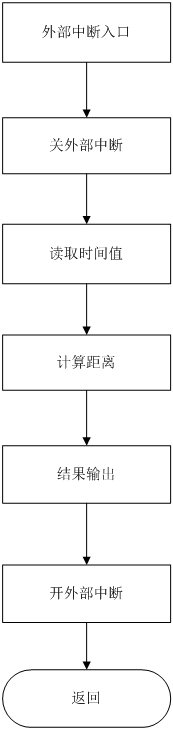
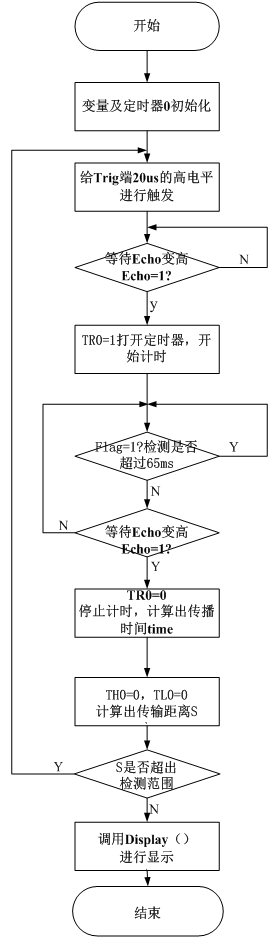
������ ϵ�y(t��ng)��ܛ���O(sh��)Ӌ(j��) �����y(c��)���x��ܛ���O(sh��)Ӌ(j��)��Ҫ�����������l(f��)�������������Д�����@ʾ�ӳ���M�ɡ��҂�֪��C�Z(y��)�Գ��������ڌ�(sh��)�F(xi��n)�^��(f��)�s���㷨���R���Z(y��)�Գ���t�����^�ߵ�Ч����������(x��)Ӌ(j��)������\(y��n)�еĕr(sh��)�g���������y(c��)���x�ij�����Ҫ���^��(f��)�s��Ӌ(j��)�㣨Ӌ(j��)����x�r(sh��)�������Կ��Ƴ���ɲ���C�Z(y��)�Ծ��̡� 4.1 ���������̈D ܛ���֞�ɲ��֣���������Д����(w��)������D4-1���D4-2���D4-3��ʾ����������ɳ�ʼ����������·�����l(f��)��ͽ������Ŀ��ơ� ���r(sh��)�Д����(w��)�ӳ�����Ɇη������İl(f��)�䣬�ⲿ�Д����(w��)�ӳ�����Ҫ��ɕr(sh��)�gֵ���xȡ�����xӋ(j��)�㡢�Y(ji��)����ݔ���ȹ����� �����������nj�(du��)ϵ�y(t��ng)�h(hu��n)����ʼ�����O(sh��)�ö��r(sh��)��T0����ģʽ��16λ���r(sh��)Ӌ(j��)��(sh��)��ģʽ����λ���Д����SλEA���o�@ʾ�˿�P0��P1��0��Ȼ���{(di��o)�ó����l(f��)���ӳ����ͳ�һ��(g��)�����}�_�����˱��ⳬ���İl(f��)����ֱ�ӂ��͵������������ֱ�䲨�|�l(f��)����Ҫ�ӕr(sh��)�s0.1ms���@Ҳ���dz����y(c��)���x��(hu��)��һ��(g��)��С�ɜy(c��)���x��ԭ�Ŵ��_(k��i)���Д�1���շ��صij�����̖(h��o).
���ڲ��õ���12MHz�ľ���Ӌ(j��)��(sh��)��ÿӋ(j��)һ��(g��)��(sh��)����1��s����(d��ng)������z�y(c��)�����ճɹ��Ę�(bi��o)־λ��Ӌ(j��)��(sh��)��T0�еĔ�(sh��)����������(l��i)�����õĕr(sh��)�g����ʽ��4-1��Ӌ(j��)�㣬���ɵñ��y(c��)���w�c�y(c��)���x֮�g�ľ��x���O(sh��)Ӌ(j��)�r(sh��)ȡ20��r(sh��)���ٞ�344m/s�t�У� d=(c t)/2=172T0/10000cm ��4-1�� t)/2=172T0/10000cm ��4-1�� ���У�T0��Ӌ(j��)��(sh��)��T0��Ӌ(j��)��ֵ�� �y(c��)�����x��Y(ji��)�������oLCD��(sh��)�a�@ʾ�s5s��ͬ�r(sh��)�y(c��)�����x���Z(y��)��ģ�K����(b��o)��Ȼ���ٰl(f��)�����}�_�؏�(f��)�y(c��)���^(gu��)�̡����������ڳ���Y(ji��)��(g��u)��������Ӌ(j��)������x�����������C�Z(y��)�Ծ����� 4.2 �����l(f��)���ӳ���ͳ��������Д���� �����l(f��)���ӳ����������ͨ�^(gu��)P1.1�˿ڰl(f��)��2��(g��)���ҳ����}�_��̖(h��o)���l�ʼs40kHz�ķ��������}�_���Ȟ�20��s���ң�ͬ�r(sh��)��Ӌ(j��)��(sh��)��T0���_(k��i)�M(j��n)��Ӌ(j��)�r(sh��)�������l(f��)���ӳ����^��(ji��n)�Σ���Ҫ������\(y��n)�М�(zh��n)�_�� | �D4-2 ���r(sh��)�Д����(w��)�ӳ��� |
�����y(c��)���x�������������Д�1�z�y(c��)���س�����̖(h��o)��һ�����յ����س�����̖(h��o)����INT1���_���F(xi��n)���ƽ���������M(j��n)���Д�����M(j��n)���Д��������P(gu��n)�]Ӌ(j��)�r(sh��)��T0ֹͣӋ(j��)�r(sh��)�������y(c��)��ɹ���(bi��o)־���xֵ1�������(d��ng)Ӌ(j��)�r(sh��)������r(sh��)߀δ�z�y(c��)������������̖(h��o)���t���r(sh��)��T0����Д������Д�1�P(gu��n)�]�������y(c��)��ɹ���(bi��o)־���xֵ2�Ա�ʾ�˴Μy(c��)��ɹ��� 1
1
�����³����y(c��)����� 5.1 HC-SR04ģ�K HC-SR04�����y(c��)��ģ�K���ṩ2cm-400cm�ķǽ��|ʽ���x�Мy(c��)���ܣ���Y(ji��)��(g��u)��(ji��n)�Σ�ʹ�Æ�Ƭ�C(j��)�����·��(ji��n)�����ף����҃r(ji��)����ˡ�ԓģ�K���������l(f��)�䡢�����c�����·����(sh��)����D5-1�� | �D5-1 HC-SR04ģ�K��(sh��)��D |
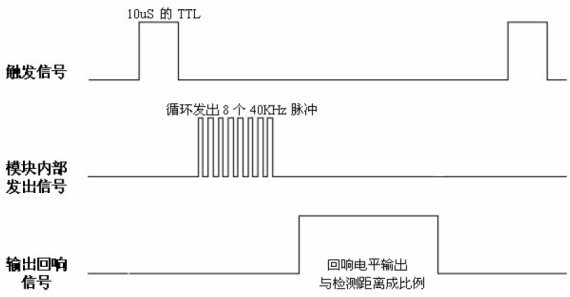
��������ԭ�� �ٲ���IO��TRIG�|�l(f��)�y(c��)�࣬�o����10us�ĸ��ƽ��̖(h��o)�� ��ģ�K�Ԅ�(d��ng)�l(f��)��8��(g��)40khz�ķ������Ԅ�(d��ng)�z�y(c��)�Ƿ�����̖(h��o)���أ� ������̖(h��o)���أ�ͨ�^(gu��)IO��ECHOݔ��һ��(g��)���ƽ�����ƽ���m(x��)�r(sh��)�g���dz� ���İl(f��)�䵽���صĕr(sh��)�g�� 늚Ⅲ��(sh��) HC-SR04ģ�K����(sh��)���±�5-1��ʾ��
��5-1ģ�K����(sh��)
| | | | | | | | | | | | | | | | | ݔ��TTL�ƽ��̖(h��o)���c��̳ɱ��� | | |
�����r(sh��)��D �����r(sh��)��D��D5-2��ʾ
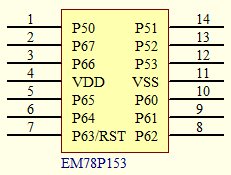
���ϕr(sh��)��D����ֻ��Ҫ�ṩһ��(g��)10us�����}�_��̖(h��o)��ԓģ�K��(n��i)�����l(f��)��8��(g��)40khz�����ƽ���z�y(c��)�ز���һ���z�y(c��)���лز���̖(h��o)�tݔ�������̖(h��o)�������̖(h��o)���}�_�����c�y(c��)���ľ��x�����ȡ��ɴ�ͨ�^(gu��)�l(f��)����̖(h��o)���յ��Ļ����̖(h��o)�r(sh��)�g�g������Ӌ(j��)��õ����x�� ���x=���ƽ�r(sh��)�g*�٣�340m/s��/2�� ���ֹ�l(f��)����̖(h��o)��(du��)�����̖(h��o)��Ӱ푣��y(c��)������һ��Ҫ60ms���ϡ� ģ�K��Ҫ��Em78p153��Ƭ�C(j��)��MAX232��TL074��������������T40-16��R40-16�M�ɡ� Em78p153��Ƭ�C(j��) �ٸśr���� Em78p153�Dz��ø���CMOS��ˇ�����8λ��Ƭ�C(j��)�����(n��i)����512*13λһ����ROM(OTPROM)����ˣ��Ñ����Է�����M(j��n)���Ƴ�������a����EMC����������оƬ����13λ�x�(xi��ng)λ�ɝM���Ñ�Ҫ�����еı��o(h��)λ���Á�(l��i)��ֹ�����x���� �ڹ������c(di��n) ����늉�������2.0V~6.0V�� �����ضȷ�����0��~70�棻 �����l�ʷ�����DC~8MHz�� 512��13λƬ��(n��i)ROM��32��8λƬ��(n��i)�Ĵ�����SDRAM���� Ƭ��(n��i)��4MHzУ��(zh��n)RC��ʎ���� 2��(g��)�p��I/O�˿ڣ� 8λ��(sh��)�r(sh��)���r(sh��)/Ӌ(j��)��(sh��)����TCC������̖(h��o)Դ���|�l(f��)�ؿɾ����x������a(ch��n)���Дࣻ ���ģʽ(SLEEPģʽ)�� 3��(g��)�Д�Դ��TCC����Дࡢݔ�����_��B(t��i)׃���Дࡢ�ⲿ�Дࣻ EM78P153��14�_���b�����b��ʽ��SOP��SSOP��DIP�� �����_���� Em78p153��Ƭ�C(j��)���_������D5-3��
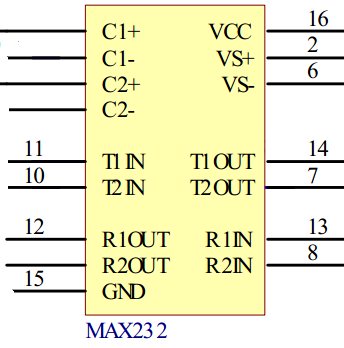
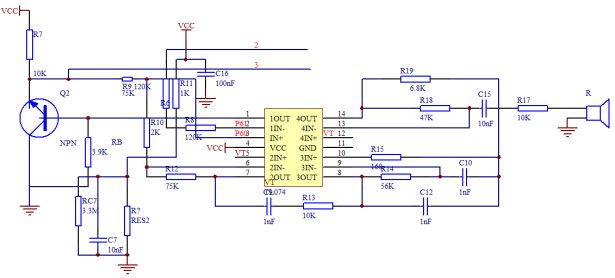
MAX232 MAX232оƬ�����Ź�˾���T����X��RS-232��(bi��o)��(zh��n)�����O(sh��)Ӌ(j��)�Ć��Դ�ƽ�D(zhu��n)�QоƬ,ʹ��+5v���Դ��늡�MAX232�����ڴ���ͨ�ţ����ƽ�D(zhu��n)�Q�����ã������O(sh��)Ӌ(j��)ֻ�õ����ƽ�D(zhu��n)�Q����40kHz�ķ�����5V�D(zhu��n)�Q��20V����߰l(f��)�书�ʡ������l(f��)���^���ù����l�ʞ�40kHz��TCT40-16̽�^�������^����RCT40-16�� ��M(f��i)AX232���_�D оƬ���_��D5-4��
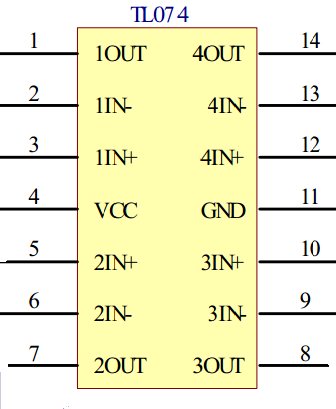
�����_��B ��һ������늺ɱ��·����1��2��3��4��5��6�_��4ֻ��ݘ�(g��u)�ɡ������Ǯa(ch��n)��+12v��-12v�ɂ�(g��)�Դ���ṩ�oRS-232�����ƽ����Ҫ�� �ڶ������ǔ�(sh��)��(j��)�D(zhu��n)�Qͨ������7��8��9��10��11��12��13��14�_��(g��u)�Ƀɂ�(g��)��(sh��)��(j��)ͨ��������13�_��R1IN����12�_��R1OUT����11�_��T1IN����14�_��T1OUT�����һ��(sh��)��(j��)ͨ����8�_��R2IN����9�_��R2OUT����10�_��T2IN����7�_��T2OUT����ڶ���(sh��)��(j��)ͨ���� ���������ǹ�늡�15�_GND��16�_VCC��+5v���� TL074 ���õĵ���JFETݔ���\(y��n)��Ŵ��������_��D5-5��
1��2��3�_��ͨ��1��ݔ���ˡ�����ݔ��ˡ�ͬ��ݔ��ˣ�5��6��7�_��ͨ��2��ͬ��ݔ��ˡ�����ݔ��ˡ�ݔ���ˣ�8��9��10�_��ͨ��3��ݔ���ˡ�����ݔ��ˡ�ͬ��ݔ��ˣ�12��13��14�_��ͨ��4��ͬ��ݔ��ˡ�����ݔ��ˡ�ݔ���ˣ�4�_�����Դ��11�_��ؓ(f��)�Դ��TL074��(n��i)���M����(sh��)�����±�5-2��ʾ ��5-2 TL074�M��
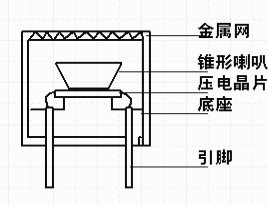
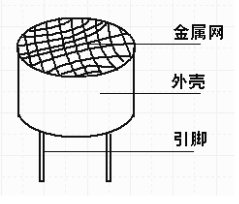
T40-16�cR40-16 �����о������ó������˂��ѽ�(j��ng)�O(sh��)Ӌ(j��)���Ƴ����S�೬���l(f��)���������w���v�������l(f��)�������Է֞�ɴ�� 늚ⷽʽ�a(ch��n)������, ��Ҫ��������͡�������s�ͺ�늄�(d��ng)�͵ȣ� �C(j��)е��ʽ�a(ch��n)����������Ҫ�����Ӡ��y(t��ng)�ѡ�Һ�ں͚������ѵȡ� �������a(ch��n)���ij������l�ʡ����ʺ������Ը�����ͬ�������;Ҳ������ͬ��Ŀǰ�^�鳣�õ��lj��ʽ�����l(f��)������ ���ʽ�����l(f��)������(sh��)�H�������É�늾��w���C���(l��i)�����ġ����(n��i)���Ѓɂ�(g��)��늾�Ƭ��һ��(g��)����塣��(d��ng)���ăɘO����}�_��̖(h��o)�����l�ʵ��ډ�늾�Ƭ�Ĺ�����ʎ�l�ʕr(sh��)����늾�Ƭ�l(f��)��������(d��ng)��������(d��ng)����a(ch��n)����������֮�������늘O�gδ���늉�����(d��ng)�������յ������r(sh��)�������ȉ�늾�Ƭ�����(d��ng)�����C(j��)е���D(zhu��n)�Q�����̖(h��o)���@�r(sh��)���ͳɞ鳬���������ˡ�ģ�Kʹ��T40-16T/R�����Q�������鉺��͡� �������f(shu��)�� �� �Q������մɳ����������� �� ̖(h��o)��T40-16T/R�� � �e��ͨ���ͣ� �����l�ʣ�40KHZ�� �� ����16mm�� ʹ�÷�ʽ��T��l(f��)���^��R������^��TR���հl(f��)���ã� �m�÷����������������������O(sh��)��ij����b���b�ã������y(c��)�༰��܇��܇��ײ�b�ã�Һ��̽�y(c��)�������ӽ��_(k��i)�P(gu��n)��������(y��ng)�õij����l(f��)���c���ա� ���������� 1.��(bi��o)�Q�l��(KHz)��40KHz�� 2.�l(f��)��늉�at10V(0dB=0.02mPa)����110dB�� 3.�����`����at40KHz(0dB=V/ubar)����-70dB�� 4.�o�����at1KHz,<1V(PF)��2000��30%�� 5.̽�y(c��)���x(m)��0.02-10�� ��������(sh��)����D5-5 ��ʾ��
HC-SR04ģ�K�����˰l(f��)��ͽ����·��Ӳ���ϲ����������O(sh��)Ӌ(j��)����(f��)�İl(f��)�估�����·��ܛ����Ҳ�o(w��)����ͨ�^(gu��)���r(sh��)���a(ch��n)��40Khz�ķ�����������մɹ���Ķ��a(ch��n)��������ʹ�Õr(sh��)��ֻҪ�ڿ��ƶˡ�Trig���l(f��)һ��(g��)����10us���ȵĸ��ƽ,�Ϳ����ڽ��նˡ�Echo���ȴ����ƽݔ������Ƭ�C(j��)һ���z�y(c��)����ݔ���ʹ��_(k��i)���r(sh��)���_(k��i)ʼӋ(j��)�r(sh��)����(d��ng)�˿�׃?y��u)���ƽ�r(sh��)��ֹͣӋ(j��)�r(sh��)���x�����r(sh��)����ֵ����ֵ�͞�˴Μy(c��)��ĕr(sh��)�g���ٸ���(j��)�����ٶȷ�������ϵK��ľ��x�� 5.2 T40��R40������������(ji��n)�� | | 5-7 Ԫ����(n��i)���Y(ji��)��(g��u) | 5-8 Ԫ���ⲿ�Y(ji��)��(g��u) |
5.2.1 �����������Ļ�����B �����y(c��)���Q���������ó������������ƶ��ɵēQ������������һ�N���(d��ng)�l�ʸ������ęC(j��)е�����ɓQ�ܾ�Ƭ��늉��ļ���(l��)�°l(f��)�����(d��ng)�a(ch��n)���ģ��������l�ʸߡ����L(zh��ng)�̡��@��F(xi��n)��С���e�Ƿ����Ժá��܉�ɞ��侀��������������c(di��n)��������(du��)Һ�w�����w�Ĵ����I(l��ng)�ܴ����������(y��ng)�ⲻ���Ĺ��w�У����ɴ���ʮ����ȡ����������s�|(zh��)��ֽ����(hu��)�a(ch��n)���@�������γɷ���ɻز����������(d��ng)���w�ܮa(ch��n)��������Ч��(y��ng)����˳����z�y(c��)�V����(y��ng)���ڹ��I(y��)����(gu��)���������t(y��)�W(xu��)�ȷ��档 �Գ�������z�y(c��)�ֶΣ���횮a(ch��n)�������ͽ��ճ���������@�N���ܵ��b�þ��dz����Q����������̽�^�� �����Q������Ҫ�ɉ�늾�Ƭ�M�ɣ��ȿ��l(f��)�䳬����Ҳ���Խ��ճ�����С���ʳ�̽�^����̽�y(c��)���á������S�ͬ�ĽY(ji��)��(g��u)���ɷ�ֱ̽�^���v������б̽�^���M���������沨̽�^�����沨�����mķ��̽�^���mķ�������p̽�^��һ��(g��)̽�^���䡢һ��(g��)̽�^���գ��ȡ� 5.2.2 ��������������Ҫ��(y��ng)�� �������м��g(sh��)��(y��ng)�������a(ch��n)��(sh��)�`�IJ�ͬ���棬���t(y��)�W(xu��)��(y��ng)����������Ҫ�đ�(y��ng)��֮һ���������t(y��)�W(xu��)�������f(shu��)���������м��g(sh��)�đ�(y��ng)�á��������t(y��)�W(xu��)�ϵđ�(y��ng)����Ҫ���\�༲�������ѽ�(j��ng)�ɞ����R���t(y��)�W(xu��)�в���ȱ�ٵ��\����������\��ă�(y��u)�c(di��n)�ǣ���(du��)�ܙz�ߟo(w��)ʹ�ࡢ�o(w��)�p����������(ji��n)�㡢�@���������\��Ĝ�(zh��n)�_�ʸߵȡ�����ƏV���ף��ܵ��t(y��)��(w��)�����ߺͻ��ߵĚgӭ�������\����Ի��ڲ�ͬ���t(y��)�W(xu��)ԭ�����҂���(l��i)���������д����Ե�һ�N���^��A�ͷ������@��(g��)���������ó����ķ��䡣��(d��ng)���������w�M���Ђ��������Ɍ��迹��ͬ�Ľ��|(zh��)�����ǣ���ԓ����ͮa(ch��n)���������ÿ����һ��(g��)������r(sh��)������ʾ��������Ļ���@ʾ����(l��i)�����ɂ�(g��)������迹��ֵҲ�Q���˻�������ĸߵ͡� �ڹ��I(y��)���棬�����ĵ��͑�(y��ng)���nj�(du��)���ٵğo(w��)�p̽���ͳ����y(c��)��ɷN���^(gu��)ȥ���S�༼�g(sh��)��?y��n)�o(w��)��̽�y(c��)�����w�M����(n��i)�����ܵ���K���������м��g(sh��)�ij��F(xi��n)��׃���@�N��r����(d��ng)Ȼ����ij����������ǹ̶��ذ��b�ڲ�ͬ���b���ϣ����ğo(w��)Ϣ����̽�y(c��)�˂�����Ҫ����̖(h��o)����δ��(l��i)�đ�(y��ng)���У��������c��Ϣ���g(sh��)���²��ϼ��g(sh��)�Y(ji��)������(l��i)�������F(xi��n)��������ܻ������`���ȵij����������� �������x���������g(sh��)��(y��ng)�� ������(du��)Һ�w�����w�Ĵ����I(l��ng)�ܴ����������(y��ng)�ⲻ���Ĺ��w�У����ɴ���ʮ����ȡ� ���������s�|(zh��)��ֽ����(hu��)�a(ch��n)���@�������γɷ���ɻز����������(d��ng)���w�ܮa(ch��n)��������Ч��(y��ng)����˳����z�y(c��)�V����(y��ng)���ڹ��I(y��)����(gu��)���������t(y��)�W(xu��)�ȷ��档�������x���������ԏV����(y��ng)������λ��Һλ���O(ji��n)�y(c��)���C(j��)���˷�ײ�����N�����ӽ��_(k��i)�P(gu��n)���Լ����I��(b��o)�������P(gu��n)�I(l��ng)�����ɿ������b���㣬 ��ˮ�ͣ��l(f��)��A���^С���`���ȸߣ������c���I(y��)�@ʾ�x���B�ӣ�Ҳ�ṩ�l(f��)��A���^���̽�^�� 5.2.3 �����������Ĺ���ԭ�� ������һ�N�ڏ��Խ��|(zh��)�еęC(j��)е��ʎ���ЃɷN��ʽ���M����ʎ���M�������v����ʎ���v�������ڹ��I(y��)�Б�(y��ng)����Ҫ���ÿv����ʎ�����������ښ��w��Һ�w�����w�Ђ�����������ٶȲ�ͬ�����⣬��Ҳ������ͷ���F(xi��n)�����ڂ����^(gu��)������˥�p���ڿ՚��Ђ������������l���^�ͣ�һ����ʮKHZ�����ڹ��w��Һ�w�Єt�l�ʿ��õ��^�ߡ��ڿ՚���˥�p�^�죬����Һ�w�����w�Ђ�����˥�p�^С�������^�h(yu��n)�����ó��������ԣ������ɸ��N�������������ϲ�ͬ���·���Ƴɸ��N���y(c��)��?j��)x�����b�ã�����ͨѸ���t(y��)����늵ȸ�����õ��V����(y��ng)�á� ������������Ҫ�����Љ�늾��w�������s������F�X�Ͻ𣨴�����s����������s�IJ����������U��PZT���ȡ���늾��w�M�ɵij�����������һ�N����?zh��n)������������Ԍ�����D(zhu��n)׃�əC(j��)е��ʎ���a(ch��n)��������ͬ�r(sh��)�����յ������r(sh��)��Ҳ���D(zhu��n)׃����ܣ����������Էֳɰl(f��)��������������еij��������������l(f��)�ͣ�Ҳ�������ա��@��H��BС�ͳ������������l(f��)���c�������в�e�����m�����ڿ՚��Ђ����������l��һ���23-25KHZ��40-45KHZ���@������m���ڜy(c��)�ࡢ�b�ء����I����;��ԓ�N��T/R-40-60��T/R-40-12�ȣ�����T��ʾ�l(f��)�ͣ�R��ʾ���գ�40��ʾ�l�ʞ�40KHZ��16��12��ʾ���⏽�ߴ磬�Ժ���Ӌ(j��)��������һ�N�ܷ�ʽ������������MA40EI�ͣ����������c(di��n)�Ǿ��з�ˮ���ã������ܷ���ˮ�У�����������λ���ӽ��_(k��i)�P(gu��n)�ã����������^�á�������(y��ng)�������N������ͣ����������b���������I��(b��o)�������Ԅ�(d��ng)�T���ӽ��_(k��i)�P(gu��n)�ȣ����xʽ���������ڜy(c��)�ࡢҺλ����λ�����������ڲ���̽�����y(c��)��ȡ� �ɰl(f��)�͂�����(��Q���l(f��)����)�����Ղ�����(��Q��������)�����Ʋ����c�Դ���ֽM�ɡ��l(f��)�����������ɰl(f��)�����cʹ��ֱ����15mm���ҵ��մ����ӓQ�����M�ɣ��Q���������nj��մ����ӵ�����(d��ng)�����D(zhu��n)�Q�ɳ������������ݗ�䣻�����Ղ��������մ����ӓQ�����c�Ŵ��·�M�ɣ��Q�������ղ��a(ch��n)���C(j��)е���(d��ng)������׃�Q��������������������������ݔ�����Ķ���(du��)�l(f��)�͵ij��M(j��n)�Йz�y(c��).����(sh��)�Hʹ���У��ðl(f��)�͂��������մ����ӵ�Ҳ������������������������մ����ӡ����Ʋ�����Ҫ��(du��)�l(f��)�����l(f��)�����}�_��l�ʡ�ռ�ձȼ�ϡ���{(di��o)�ƺ�Ӌ(j��)��(sh��)��̽�y(c��)���x���M(j��n)�п��� 5.3 �����l(f��)���· HC-SR04ģ�K��(n��i)�������l(f��)���·��D5-6��ʾ����Ҫ��Em78p153��Ƭ�C(j��)��MAX232�������l(f��)��Q����T40�M�ɡ�
5.4 ���������· HC-SR04ģ�K��(n��i)�����������·��D5-3��ʾ����Ҫ��TL074�\(y��n)��Ŵ����������ӓQ����R40�M�ɡ�
5.5 ���������^(gu��)�� ��Ƭ�C(j��)��ʼ����HC-SR04��(n��i)��ECHO�ӿ��c��Ƭ�C(j��)P1.1�����_���B���l(f��)��ӿ�TRIG�c��Ƭ�C(j��)��P1.2���_��ӡ� ��Ƭ�C(j��)�_(k��i)���Д࣬��Ƭ�C(j��)P1.1�o��Trig���ӿ�һ��(g��)�s��20us�ĸ��ƽ����(j��ng)�^(gu��)HC-SR04ģ�K��(n��i)EM78P153�l(f��)��8��(g��)�B�m(x��)��40KHz�}�_����̖(h��o)����(j��ng)�^(gu��)MAX232�ƽ�D(zhu��n)�Q����߰l(f��)�书�ʡ��Q��������}�_��̖(h��o)�D(zhu��n)�Q�鳬���l(f��)�䡣 ��(d��ng)��Ƭ�C(j��)�Ľoһ��(g��)20us���|�l(f��)��̖(h��o)�r(sh��)��TRIG�ɵ��ƽ�D(zhu��n)�Q����ƽ��TRIG=1�� ��Ƭ�C(j��)�_(k��i)�r(sh��)Ӌ(j��)�r(sh��)���_(k��i)���Д࣬��ӛ䛕r(sh��)�g��T1�����ՓQ�����ȴ����ջز���ECHO���m(x��)����ƽ�ĕr(sh��)�g��l(f��)��r(sh��)�g���Q�������ջز��������D(zhu��n)�Q�����̖(h��o)��������Ƭ�C(j��)��ӛ䛕r(sh��)�g��T2�������l(f��)��ĕr(sh��)�g�飺T2-T1, Ӌ(j��)��l(f��)����x�飺 L = (T2-T1)xC/2 ����ȴ��ز��r(sh��)�g���^(gu��)65ms�r(sh��)���t�o(w��)�����յ��ز�����Ƭ�C(j��)��ʼ�������°l(f��)�������һ�λز��� 5.6 ���Ք�(sh��)��(j��)̎�� ��Ƭ�C(j��)��ʼ������(sh��)
�����^(gu��)�̣���늺����M(j��n)�г�ʼ������Ҫ�nj�(du��)��׃�������r(sh��)��0�M(j��n)�г�ʼ����Ȼ���Ƭ�C(j��)�o��Trig����һ��(g��)�s��20us�ĸ��ƽ���˺��ڡ�Echo���˵ȴ�һ��(g��)���ƽ��һ���z�y(c��)�����ƽ���t�������_(k��i)���r(sh��)�����_(k��i)ʼӋ(j��)�r(sh��)���˺�ֻҪ���r(sh��)��0�е�ֵ�����^(gu��)�s��65ms��65.5536ms����Ӌ(j��)�r(sh��)���ޣ��t�J(r��n)����̎����Ч�y(c��)��������(n��i)����δ�M(j��n)��ä�^(q��)���t�ڡ�Echo���ȴ����ƽ�Įa(ch��n)����һ���z�y(c��)�����ƽ�������x���˕r(sh��)��TH0��TL0�����P(gu��n)�]���r(sh��)��0���t�����İl(f��)�䵽���ؿ������Õr(sh��)�g�飺time=TH0*256+TL0(us),�ٸ���(j��)����������(27��)�ڿ՚��еĂ����ٶȣ�(�s��344m/s)Ӌ(j��)����ϵK��ľ��x���ڔ�(sh��)�a�����M(j��n)�Є�(d��ng)�B(t��i)�Č�(sh��)�r(sh��)�@ʾ���ɡ� ���Ք�(sh��)��(j��)̎���ӳ������£� c_send = 1; //10us�ĸ��ƽ�|�l(f��) delay(); c_send = 0; TH0 = 0; //�o���r(sh��)��0���� TL0 = 0; TR0 = 0; //�P(gu��n)���r(sh��)��0���r(sh��) flag_hc_value = 0; while(!c_recive); //��(d��ng)c_recive����r(sh��)�ȴ� TR0=1; while(c_recive) //��(d��ng)c_recive��1Ӌ(j��)��(sh��)���ȴ� { flag_time0 = TH0 * 256 + TL0; if((flag_hc_value > 1) || (flag_time0 > 65000)) //��(d��ng)�������^(gu��)�y(c��)�������r(sh��)���@ʾ3��(g��)888 { TR0 = 0; flag_csb_juli = 2; distance = 888; flag_hc_value = 0; break ; } else { flag_csb_juli = 1; } } if(flag_csb_juli == 1) { TR0=0; //�P(gu��n)���r(sh��)��0���r(sh��) distance = TH0; //�x�����r(sh��)��0�ĕr(sh��)�g distance = distance * 256 + TL0; distance +=( flag_hc_value * 65536);//��������y(c��)��ĕr(sh��)�g �õ���λ��ms distance *= 0.017; // 0.017 = 340M / 2 = 170M = 0.017M �����(l��i)���� if(distance > 350) //���x = �ٶ� * �r(sh��)�g { distance = 888; //�������3.8m�ͳ������������� } }
�����¿��Y(ji��) �����O(sh��)Ӌ(j��)��B��һ�N���چ�Ƭ�C(j��)�ij����y(c��)��ϵ�y(t��ng)���O(sh��)Ӌ(j��)���o��������(y��ng)��ܛ����Ӳ�����O(sh��)Ӌ(j��)������ �����y(c��)���ԭ���c���_(d��)�y(c��)��ԭ�����ƣ�ͨ�^(gu��)�����l(f��)���b�ðl(f��)������������(j��)�������ӵ������r(sh��)�ĕr(sh��)�g��Ϳ���֪�����x��Ҳ�����f(shu��)�����l(f��)������ijһ����l(f��)�䳬�����ڰl(f��)��r(sh��)�̵�ͬ�r(sh��)��Ƭ�C(j��)�_(k��i)ʼӋ(j��)�r(sh��)�������ڿ՚��Ђ�����;�������ϵK�����������(l��i)�������������յ����䲨��Ƭ�C(j��)������ֹͣӋ(j��)�r(sh��)�������Ì�(du��)��(y��ng)��Ӌ(j��)�㹫ʽ�Ϳ���������w�g���g�࣬�@�Ǹ���(j��)����ԭ�������˳���ָ���ԏ�(qi��ng)���ڽ��|(zh��)�Ђ������x�^�h(yu��n)�����ԡ� �����y(c��)���xӲ���·���O(sh��)Ӌ(j��)��Ҫ������Ƭ�C(j��)�Ļ����·�������l(f��)�����ģ�K�����·���@ʾ�·���Z(y��)��ģ�K���ض��a(b��)���岿�ֲ��ֽM�ɡ���Ƭ�C(j��)������STC89C52�������12MHz����Ƭ�C(j��)P1.3�˿�ݔ��10us���|�l(f��)��̖(h��o)���ɶ��r(sh��)��T0Ӌ(j��)�Õr(sh��)�g�g�����@ʾ�·����1602���Z(y��)��оƬWTD588D�� �����O(sh��)Ӌ(j��)�ij����y(c��)��ϵ�y(t��ng)�M�㵹܇�y(c��)�������Ĝy(c��)�����ȣ����ҷ�ӳ�ٶȿ졢���ƺ�(ji��n)�Ρ��ɱ������ȣ��y(c��)�����2cm��350cm�������ڽ�(j��ng)�(y��n)����߀��Щ�ط��д����ơ���Ҫ���^�ߵĵط��r(sh��)�����ڳ����ڿ՚��еĂ����ٶ��ܜض�Ӱ����c(di��n)�t�迼�]����ͬ�ضȕr(sh��)�����Ă����ٶ�׃�Q�� ���w��(l��i)�f(shu��)����(j��ng)�^(gu��)�����O(sh��)Ӌ(j��)�ҌW(xu��)���˺ܶ࣬��������˜\���˽��˳����y(c��)���ԭ��������(du��)��Ƭ�C(j��)���_(k��i)�l(f��)���·�O(sh��)Ӌ(j��)���˸��M(j��n)һ�����˽⡣
���1ԭ��D
��Ƭ�C(j��)Դ��������: - #include <reg52.h> //�{(di��o)�Æ�Ƭ�C(j��)�^�ļ�
- #define uchar unsigned char //�o(w��)��̖(h��o)�ַ��� �궨�x ׃������0~255
- #define uint unsigned int //�o(w��)��̖(h��o)���� �궨�x ׃������0~65535
- #include <intrins.h>
-
- //��(sh��)�a�ܶ��x���x 0 1 2 3 4 5 6 7 8 9
- uchar code smg_du[]={0x25,0xee,0x37,0xa2,0xe2,0xa1,0x21,0xea,0x20,0xa0,
- 0x60,0x25,0x39,0x26,0x31,0x71,0xff}; //��a
- //��(sh��)�a��λ�x���x
- uchar code smg_we[]={0xe0,0xb0,0xd0,0x70};
- uchar dis_smg[4] ={0};
-
- sbit smg_we1 = P3^4; //��(sh��)�a��λ�x���x
- sbit smg_we2 = P3^5;
- sbit smg_we3 = P3^6;
- sbit smg_we4 = P3^7;
-
- sbit c_send = P3^2; //�����l(f��)��
- sbit c_recive = P3^3; //��������
-
- sbit beep = P3^1; //���Q��IO�ڶ��x
-
- uchar smg_i = 3; //�@ʾ��(sh��)�a�ܵĂ�(g��)λ��(sh��)
- bit flag_300ms ;
-
- long distance; //���x
- uint set_d; //���x
- uchar flag_csb_juli; //������������
- uint flag_time0; //�Á�(l��i)���涨�r(sh��)��0�ĕr(sh��)���
- uchar menu_1; //�ˆ��O(sh��)Ӌ(j��)��׃��
-
-
-
- /***********************�Z(y��)��ģ�K����IO�ڵĶ��x************************/
- sbit VRST = P2^3;
- sbit VBUSY= P2^7;
- sbit VSDA = P2^6;
- sbit VCS = P2^5;
- sbit VSCL = P2^4;
- uchar yujing[3];
-
- /***************************
- �Z(y��)����ַ�İ���
- 0 - 9 �� ��(du��)��(y��ng)��(sh��)��0��9
- 0b : �c(di��n)
- 0c : ��
- 0d : �ѳ�������
-
- **************************/
-
- /***********************1ms�ӕr(sh��)����(sh��)*****************************/
- void delay_1ms(uint q)
- {
- uint i,j;
- for(i=0;i<q;i++)
- for(j=0;j<120;j++);
- }
-
-
- /********************��(d��)�����I����*****************/
- uchar key_can; //���Iֵ
-
- void key() //��(d��)�����I����
- {
- static uchar key_new;
- key_can = 20; //���Iֵ߀ԭ
- P2 |= 0x07;
- if((P2 & 0x07) != 0x06) //���I����
- {
- delay_1ms(1); //���I������(d��ng)
- if(((P2 & 0x07) != 0x07) && (key_new == 1))
- { //�_�J(r��n)�ǰ��I����
- key_new = 0;
- switch(P2 & 0x07)
- {
- case 0x05: key_can = 1; break; //�õ�k2�Iֵ
- case 0x04: key_can = 2; break; //�õ�k3�Iֵ
- case 0x02: key_can = 3; break; //�õ�k4�Iֵ
- }
- }
- }
- else
- key_new = 1;
- }
-
- /****************���I̎���@ʾ����(sh��)***************/
- void key_with()
- {
- if(key_can == 1) //�O(sh��)���I
- {
- menu_1 ++;
- if(menu_1 >= 2)
- {
- menu_1 = 0;
- smg_i = 3; //ֻ�@ʾ3λ��(sh��)�a��
- }
- if(menu_1 == 1)
- {
- smg_i = 4; //ֻ�@ʾ4λ��(sh��)�a��
- }
- }
- if(menu_1 == 1) //�O(sh��)��(b��o)��
- {
- if(key_can == 2)
- {
- set_d ++ ; //��1
- if(set_d > 400)
- set_d = 400;
- }
- if(key_can == 3)
- {
- set_d -- ; //�p1
- if(set_d <= 1)
- set_d = 1;
- }
- dis_smg[0] = smg_du[set_d % 10]; //ȡС��(sh��)�@ʾ
- dis_smg[1] = smg_du[set_d / 10 % 10] ; //ȡ��(g��)λ�@ʾ
- dis_smg[2] = smg_du[set_d / 100 % 10] & 0xdf ; //ȡʮλ�@ʾ
- dis_smg[3] = smg_du[10]; //a
- }
- }
-
- /***********************�Z(y��)���ӳ���************************/
- void Send_threelines(unsigned char addr)
- {
- unsigned char i;
- VRST=0;
- delay_1ms(5);
- VRST=1;
- delay_1ms(10); /* ��(f��)���10ms*/
- VCS=0;
- delay_1ms(5); /* Ƭ�x����5ms */
- for(i=0;i<8;i++)
- {
- VSCL=1;
- if(addr&0x01 == 0x01)
- {
- VSDA=1;
- }
- else
- VSDA=0;
- addr<<=1;
- VSCL=0;
- }
- VCS=1;
- while(VBUSY == 0); //æ�ȴ�
- }
-
-
- /***********************��(sh��)�aλ�x����(sh��)*****************************/
- void smg_we_switch(uchar i)
- {
- switch(i)
- {
- case 0: smg_we1 = 0; smg_we2 = 1; smg_we3 = 1; smg_we4 = 1; break;
- case 1: smg_we1 = 1; smg_we2 = 0; smg_we3 = 1; smg_we4 = 1; break;
- case 2: smg_we1 = 1; smg_we2 = 1; smg_we3 = 0; smg_we4 = 1; break;
- case 3: smg_we1 = 1; smg_we2 = 1; smg_we3 = 1; smg_we4 = 0; break;
- }
- }
-
-
- /****************��(b��o)������(sh��)***************/
- void clock_h_l()
- {
- static uchar value;
- if(distance <= set_d)
- {
- value ++; //������(sh��)�H���x���O(sh��)�����x����׃���r(sh��)�ĸɔ_
- if(value >= 2)
- {
- beep = ~beep; //���Q����(b��o)��
- }
- }
- else
- {
- value = 0;
- beep = 1; //ȡ����(b��o)��
- }
- }
-
- /***********************��(sh��)�a�@ʾ����(sh��)*****************************/
- void display()
- {
- static uchar i;
- i++;
- if(i >= smg_i)
- i = 0;
- smg_we_switch(i); //λ�x
- P1 = dis_smg[i]; //���x
- }
-
- /******************С�ӕr(sh��)����(sh��)*****************/
- void delay()
- {
- _nop_(); //��(zh��)��һ�l_nop_()ָ�����1us
- _nop_();
- _nop_();
- _nop_();
- _nop_();
- _nop_();
- _nop_();
- _nop_();
- _nop_();
- _nop_();
- }
-
-
- /*********************�����y(c��)�����*****************************/
- void send_wave()
- {
- c_send = 1; //10us�ĸ��ƽ�|�l(f��)
- delay();
- c_send = 0;
- TH0 = 0; //�o���r(sh��)��0����
- TL0 = 0;
- TR0 = 0; //�P(gu��n)���r(sh��)��0���r(sh��)
- while(!c_recive); //��(d��ng)c_recive����r(sh��)�ȴ�
- TR0=1;
- while(c_recive) //��(d��ng)c_recive��1Ӌ(j��)��(sh��)���ȴ�
- {
- flag_time0 = TH0 * 256 + TL0;
- if((flag_time0 > 40000)) //��(d��ng)�������^(gu��)�y(c��)�������r(sh��)���@ʾ3��(g��)888
- {
- TR0 = 0;
- flag_csb_juli = 2;
- distance = 888;
- break ;
- }
- else
- {
- flag_csb_juli = 1;
- }
- }
- if(flag_csb_juli == 1)
- {
- TR0=0; //�P(gu��n)���r(sh��)��0���r(sh��)
- distance =flag_time0; //�x�����r(sh��)��0�ĕr(sh��)�g
- distance *= 0.017; // 0.017 = 340M / 2 = 170M = 0.017M �����(l��i)����
- if((distance > 500)) //���x = �ٶ� * �r(sh��)�g
- {
- distance = 888; //�������3.8m�ͳ�������������
- }
- }
- }
-
- /***********************̎�����x����(sh��)****************************/
- void smg_display()
- {
- dis_smg[0] = smg_du[distance % 10]; //���xȡ����(l��i)���ھ��_�^(q��)��
- dis_smg[1] = smg_du[distance / 10 % 10];
- dis_smg[2] = smg_du[distance / 100 % 10] & 0xdf;
- yujing[0] = distance % 10; //���x�ŵ��Z(y��)����׃����
- yujing[1] = distance / 10 % 10;
- yujing[2] = distance / 100 % 10;
- }
-
-
- /*********************���r(sh��)��0�����r(sh��)��1��ʼ��******************/
- void time_init()
- {
- EA = 1; //�_(k��i)����
- TMOD = 0X11; //���r(sh��)��0�����r(sh��)��1������ʽ1
- ET0 = 0; //�P(gu��n)���r(sh��)��0��
- TR0 = 1; //���S���r(sh��)��0���r(sh��)
- ET1 = 1; //�_(k��i)���r(sh��)��1��
- TR1 = 1; //���S���r(sh��)��1���r(sh��)
- }
-
-
-
- /***************������(sh��)*****************/
- void main()
- {
- static uchar value = 5;
- send_wave(); //�y(c��)���x����(sh��)
- smg_display(); //̎�����x�@ʾ����(sh��)
- time_init(); //���r(sh��)����ʼ������
- while(1)
- {
- key(); //���I����(sh��)
- if(key_can < 10)
- {
- key_with(); //���I̎������(sh��)
- }
- if(flag_300ms == 1)
- {
- flag_300ms = 0;
- send_wave(); //�y(c��)���x����(sh��)
- if(menu_1 == 0)
- {
- smg_display(); //̎�����x�@ʾ����(sh��)
- value ++;
- if(value > 10) //3����Ԅ�(d��ng)����һ��
- {
- value = 0;
- if(distance == 888)
- {
- Send_threelines(0x0d); //�ɰ�ȫ��܇
- }
- else
- {
- Send_threelines(yujing[2]); //�Z(y��)������
- Send_threelines(0x0b);
- Send_threelines(yujing[1]);
- Send_threelines(yujing[0]);
- Send_threelines(0x0c);
- }
- }
- }
- }
- }
- }
-
- /*********************���r(sh��)��1�����(w��)����************************/
- void time1_int() interrupt 3
- {
- static uchar value; //���r(sh��)2ms�Д�һ��
- TH1 = 0xf8;
- TL1 = 0x30; //2ms
- display(); //��(sh��)�a���@ʾ����(sh��)
- value++;
-
- if(value >= 150)
- {
- value = 0;
- flag_300ms = 1;
- clock_h_l(); //��(b��o)������(sh��)
- }
- }
������Word��ʽ�ęn51�����d��ַ��
 �����y(c��)���Z(y��)������(b��o)Փ��.doc
(3.05 MB, ���d��(sh��): 105)
�����y(c��)���Z(y��)������(b��o)Փ��.doc
(3.05 MB, ���d��(sh��): 105)
2018-10-30 13:31 �ς�
�c(di��n)���ļ������d����
���d�e��: �ڎ� -5
| 



 [��(f��)��朽�]
[��(f��)��朽�]

 ����TQQ:125739409;���g(sh��)����QQȺ281945664
����TQQ:125739409;���g(sh��)����QQȺ281945664








 QQ���Ѻ�Ⱥ
QQ���Ѻ�Ⱥ QQ���g
QQ���g �vӍ��
�vӍ�� �vӍ����
�vӍ���� �ղ�
�ղ� ����
���� �
� ��
�� ����ģ�K�����ǘ�(bi��o)��(zh��n)���ˡ������оƬ�� 78p163 ��Ƭ�C(j��)������
����ģ�K�����ǘ�(bi��o)��(zh��n)���ˡ������оƬ�� 78p163 ��Ƭ�C(j��)������