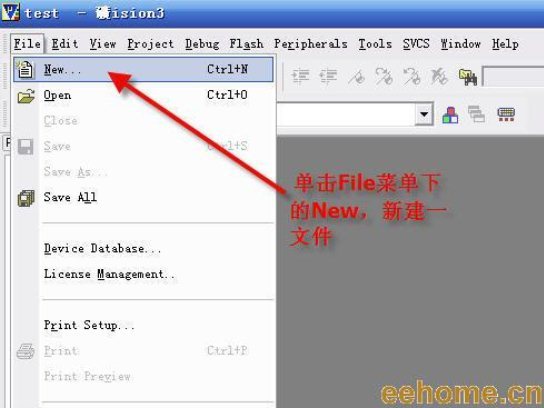
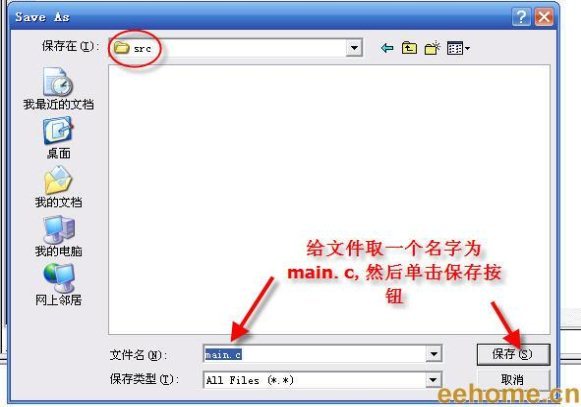
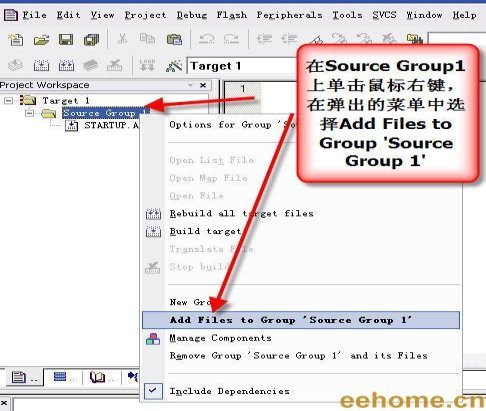
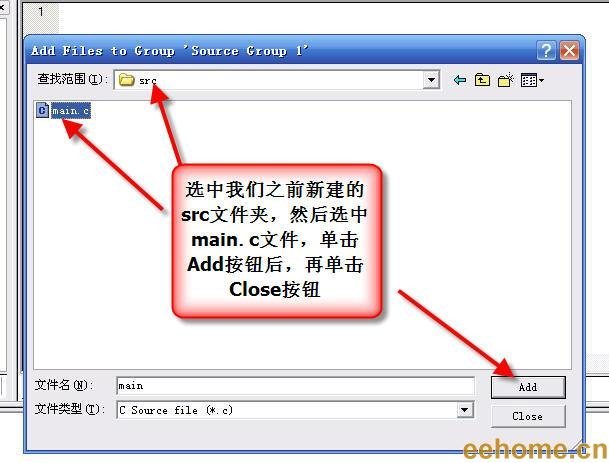
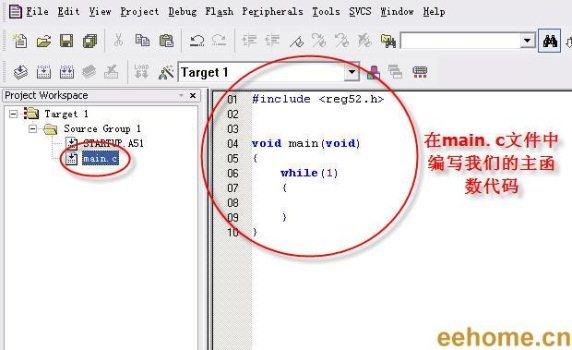
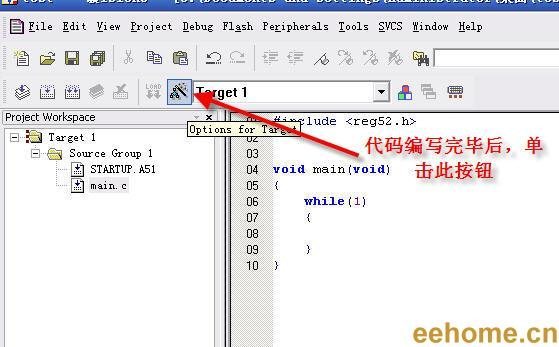
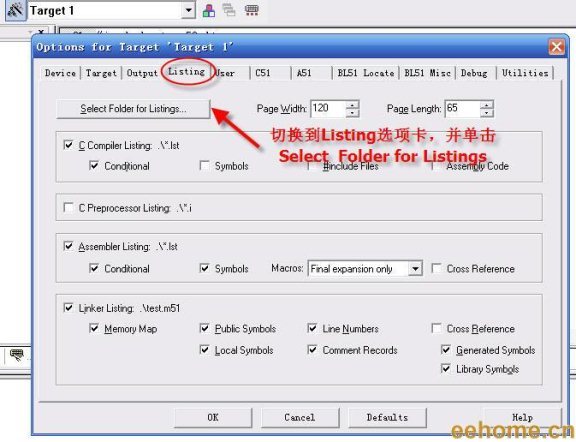
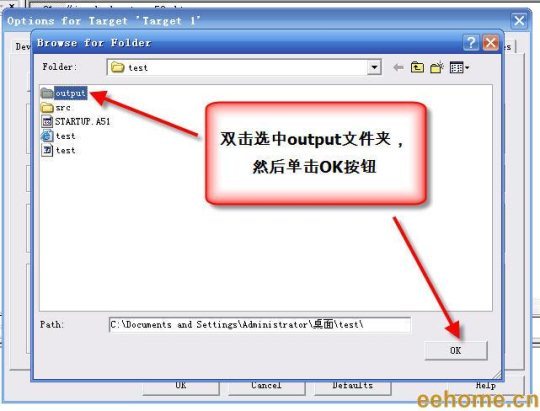
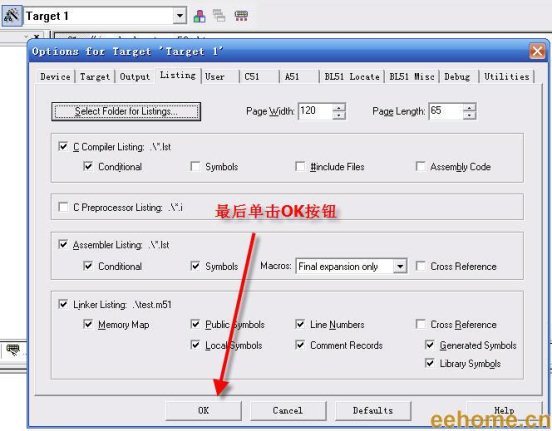
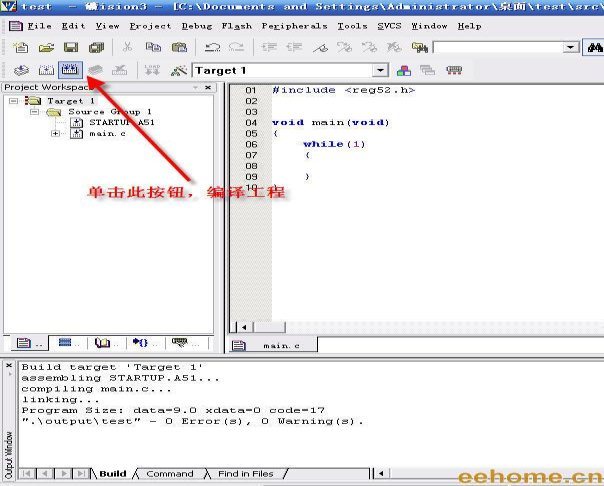
һ��(g��)�dz�Ԕ��(x��)�Ć�Ƭ�C(j��)���̷̳̽����o��ң���LED��KEY������߆�Ƭ�C(j��)��������
ǰ�� �҂��ÌW(xu��)��Ƭ�C(j��)��Ҫͣ����ʾ�Ļ��A(ch��)�ϡ�ֻ����Ƭ�C(j��)��ɾֲ��¡��@���҂����h(yu��n)����(hu��)�߳���ˮ���تz������ �W(xu��)��(x��)��Ƭ�C(j��)Ҳ�ѽ�(j��ng)�Ў����ˣ���˙C(j��)��(hu��)�ʹ����һ���ҌW(xu��)��(x��)�^���е�һЩ��(j��ng)�v���뷨�ɡ�Ҳ���xһ�������ṩ���@��(g��)�C(j��)��(hu��)��ϣ�������ʲô�õ��뷨�ͽ��h��ֱ�Ӹ����f����������ֻ�н������܉���ײ���� ^_^��
���uŪ��Ҳ�ã������u��Ҳ�T����ֻ�����J(r��n)��Č������@һ·�߁�v��(j��ng)�Ŀ�����������ֵ��ע�⣬�Լ���(j��ng)�(y��n)�ĵط�����������(qu��n)��(d��ng)���Ҍ��Լ���һ��(g��)���Y(ji��)�ɡ������鿴�ٵ��㣬����������ҵ��e(cu��)�`��߀Ոһ��ָ�����@�ӌ����Լ������x�߶��Ў���������������������܉��ի@��Щ�S���DZ�����������ο�ˡ�������֮������ ֮�������ɶ�õ��뷨�ͽ��hһ��Ҫ�f����������ǰ���ͱ�����W(xu��)��һ�ӣ��ҽ��|���ˆ�Ƭ�C(j��)�����̱�������Ĺ������������Ĵ˲����Ρ��ܶ���(g��)��ҹ���@������������^�ˡ����gҲ�����^�dz���Ć��}��Ҳһ�ȱ��@Щ���}�������ȵ����^�^���������Լ�����(j��ng)���^��·����u���ѡ���(j��ng)�����E��Փ���Ҳ�����˺ܶ���W(xu��)�߰l(f��)���������ӣ��������������Լ������^�ď�·�ϣ���Ȼ�뵽���Լ����Ƕ����ӣ����ᄍȻĪ���ě_��(d��ng)�����˿������ҿ��DZM�Լ�����ȥ�������ܶ��r(sh��)���댑һ�c(di��n)ʲô�|��������ϣ�����V��ij��W(xu��)����һ�c(di��n)�c(di��n)�����������Dz�֪�ĺ�̎���𡣽����һ�����˵��_(t��i)����һ���ҵđ�
һ·�W(xu��)��(x��)�^�����^���У��������֮һ�o�Ɂ����ھW(w��ng)�j(lu��)�ˡ��ܶ��r(sh��)��ͨ�^�W(w��ng)�j(lu��)���҂������ԫ@ȡ������Ҫ�ČW(xu��)��(x��)�Y�ϡ����ǣ��S���҂��W(xu��)��(x��)�����룬�҂���(hu��)�����l(f��)�F(xi��n)���W(w��ng)�j(lu��)�ṩ�Ė|�������ȵģ�����ֵ��Y�϶���࣬�����f���m�ϴֵij��W(xu��)�����裬����(d��ng)�҂�����M(j��n)һ����ߕr(sh��)���s�l(f��)�F(xi��n)�܉�@ȡ�����Y��Խ��Խ�٣����Ÿ�λҲ��(hu��)��ͬ�У�����w�صĆ�Ƭ�C(j��)�Y���дֲ�����ˮ������LED��Һ��������Ҳֻ�ǃH�H�������Ե���ʾ��������Щ���x���˷ŗ����������D(zhu��n)�Ƶ������dȤ����ȥ�ˣ���ֻ���ٲ������x�����^�m(x��)������ȥ���Y(ji��)�������ϵĕ�����Ȼ���ھW(w��ng)�j(lu��)��囶�������Ѽ��Y�ϣ��ُ�ţ�˵�ֻ��Ƭ�Z��ȥ�w��(hu��)��������(d��ng)��(sh��)�`�������ģ�Ҳ�����������Լ���һ�l·�ӡ���(d��ng)Ȼ�@��(g��)�^�̱�Ȼ���D���ģ������W(xu��)��(hu��)��֮��Ҳ����(hu��)�ھW(w��ng)�j(lu��)���p�����Լ��ČW(xu��)��(x��)�ɹ�����ː���ѭ�h(hu��n)��ȥ��Ҳ�Ͳ��y�����ʲô�����ČW(xu��)��(x��)�Y�ϝM���w��������һ�c(di��n)�ČW(xu��)��(x��)�Y�υs���ٵ�ԭ���ˡ����^�������I(l��ng)��Ƭ�C(j��)���g(sh��)�ķ��i�������ס��M���ѽ�(j��ng)�����˺ܶ����ˣ��Ѓr(ji��)ֵ���Y��߀���ஔ(d��ng)?sh��)�Ƿȱ���ֵ��Y�϶���ֹ�����T�A�λ����Ǻ��ε���ʾ��(sh��)�(y��n)�������ڌ�(sh��)�H���̑�(y��ng)���Ѕs������һ���¡��������ĸ��֟oϾ�����Dz�Ը���_�Լ��ČW(xu��)��(x��)��(j��ng)�(y��n)��
�ܶ��r(sh��)����Ҳ������������ۺ��ߺ����������ھW(w��ng)�j(lu��)�ϰl(f��)���Լ�����Ʒ���Һ�Ȼ���X��һ�z�z�ı�����Ҳ�S���҂����ԓ�D(zhu��n)׃һ��˼·�ˣ������e�ˣ��䌍(sh��)Ҳ���ڎ����Լ����������µ��f���@ô�࣬���Ŵ���܉������f����ʲô��˼���ڽ�����һ��������Ҍ���(hu��)�Y(ji��)����ӹ��̎�֮���e�k�����}�ܻ��(d��ng)��һ�c(di��n)�Լ����뷨���M���Č�(sh��)�õĽǶ�ȥ�v����ϣ���܉��������ij��W(xu��)�߸���һ�Әǡ����P(gu��n)���@��(g��)���}�ܵ�������}�������@�ӵ�һ��(g��)���֡��Ć�Ƭ�C(j��)���W(xu��)���~���Ƭ�C(j��)���̎���������ͦ��ͦ������o�ҵĉ���Ҳͦ��ģ����ҕ�(hu��)Ŭ������ȡʹ�@�ӵ�һϵ�������܉o���һ�c(di��n)�����������ǿ��������R���@�ӵ�һϵ��������Ҫ�Č����dz��W(xu��)�ߣ��Լ���ij��W(xu��)�߸��M(j��n)һ����ߵ��x�ߡ����������֣��Լ���ЩţXX���ˣ�ϣ���܉�o�҂��@Щ���W(xu��)�߸����һЩָ�c(di��n)��~@_@ ��
��һ�� ��ˮ��
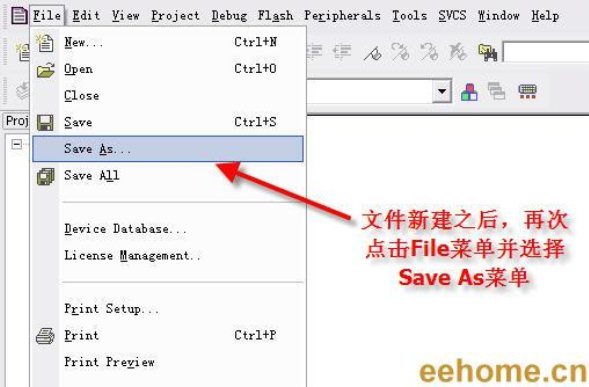
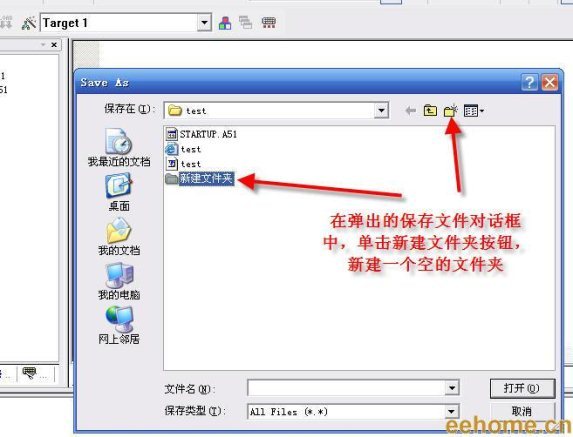
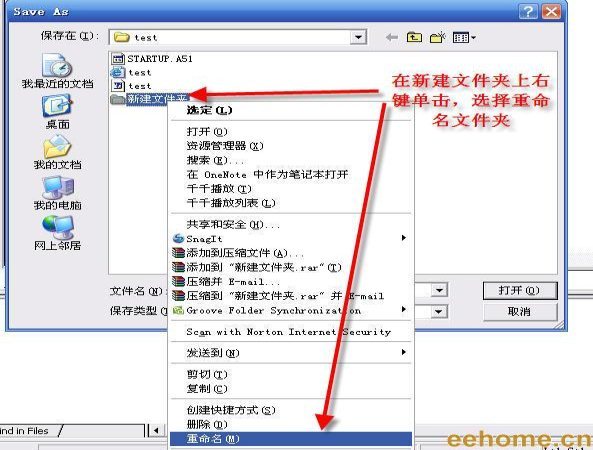
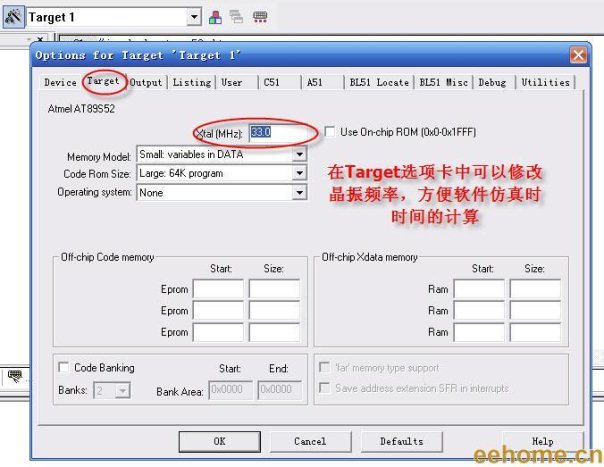
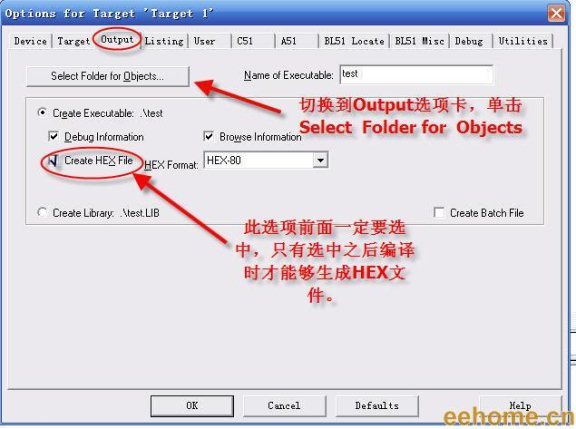
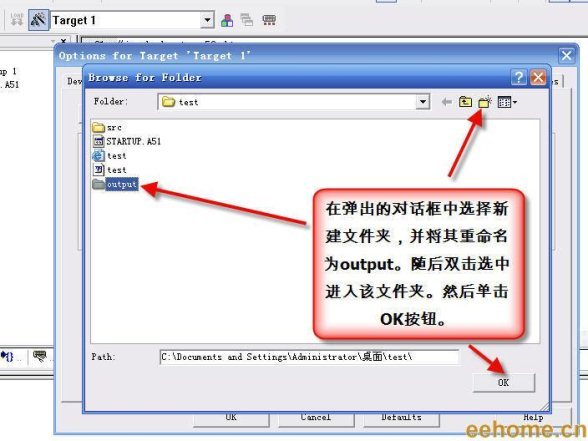
���@һ���_ʼ���҂��_ʼ�~���Ƭ�C(j��)�����硣���҂��_ʼ�@һ�¾��w�ČW(xu��)��(x��)֮ǰ���б�Ҫ�o������f��һ�¡����Ժ��ϵ�������У��҂�����51��(n��i)�˵Ć�Ƭ�C(j��)���d�w��C�Z�Ԟ龎���Z�ԣ��_�l(f��)�h(hu��n)����KEIL uv3�����ڞ�ʲô�x��C�Z���_�l(f��)����̎���Զ������_�l(f��)�ٶȿ죬Ч�ʸߣ����a�ɏ�(f��)���ʸߣ��Y(ji��)��(g��u)�������������ڴ��͵ij����У������S�����g���IJ����������侎�g��Ĵ��a��С�c�R���Z�ԵIJ��Խ��ԽС�����P(gu��n)��C�Z�ԺͅR��֮���������ǂ�(g��)ɶ��ÿ��һ�Εr(sh��)�g����(hu��)���������@��(g��)Ԓ�}���������dȤ�����Ե��W(w��ng)���������P(gu��n)������������x�������f�R������Ҫ���ںܶ����r(sh��)��Ҫ��dz��ߵĈ��ϣ���Ҫ���ÅR���Z�Ժ�C�Z�Ի�Ͼ��̲��܉�M��ϵ�y(t��ng)���������҂��W(xu��)��(x��)����C�Z�Ե�ͬ�r(sh��)��Ҳ߀��Ҫ�����e��ĕr(sh��)�gȥ�W(xu��)��(x��)�˽�R���Z�ԡ�
- ���c(di��n)��LED(�l(f��)����O��)�_ʼ
- �������ϱ���Ć�Ƭ�C(j��)�W(xu��)��(x��)�Y���У�����A(ch��)�Č�(sh��)�(y��n)�o�����c(di��n)��LED�ˣ������Ɔ�Ƭ�C(j��)��I/O���ƽ��׃����
��ͬ����(sh��)�����aһ��
void main(void)
{
LedInit() ;
While(1)
{
LED = ON ;
DelayMs(500) ;
LED = OFF ;
DelayMs(500) ;
}
}
����ܺ��Σ������ĽY(ji��)��(g��u)���Կ�����LED���c(di��n)��500MS��Ȼ��Ϩ��500MS�����ѭ�h(hu��n)��ȥ���γɵ�Ч������LED��1HZ���l���M(j��n)���W�q�������҂���������ij����Л]��ʲô���}��
��������������������İ�������ʲô���}�أ��@��(g��)�r(sh��)���҂���(y��ng)ԓ�Qһ��(g��)˼·ȥ���ˡ�ԇ�룬����(g��)������˿���LED = ON �� LED = OFF�� �@�ɗl�Z���⣬����ĕr(sh��)�g��ȫ��������DelayMs(500)�@�ɂ�(g��)����(sh��)�ϡ����ڌ�(sh��)�H��(y��ng)��ϵ�y(t��ng)���Ǜ]���Ă�(g��)ϵ�y(t��ng)ֻ�W�qһֻLED������ʲô���鶼�����˵ġ���ˣ����@���҂�Ҫ���k������CPU��ų���������Ҫ�װ����M(f��i)500MS���ӕr(sh��)�ȴ��r(sh��)�g��������һ����һ��Ē��迴����Щ�΄�(w��)��Ҫ��(zh��)�У�Ҳ��Ҫ��ͣ����ij��(g��)�ط����D(zhu��n)����CPU�r(sh��)�g��
�������҂����Կ��Y(ji��)����
(1)�oՓʲô�r(sh��)���҂���Ҫ�Ԍ�(sh��)�H��(y��ng)�õĽǶ�ȥ���]����ľ�����
(2)�oՓʲô�r(sh��)��ҪCPU�װ����M(f��i)�ȴ����������ӕr(sh��)(���^1MS)�@�ӵĵط���
�����҂�������һ��(g��)�Ƕȁ����]����c(di��n)��һ�wLED�� �ȿ����҂���Ӳ���Y(ji��)��(g��u)��ʲô���ӵġ� �����ϵĆ�Ƭ�C(j��)��������ӹ��̎�֮�ҵ��_�l(f��)�ČW(xu��)��(x��)�塣�������Č�(sh��)�HӲ���B�ӈD�������ɡ����D��ʾ һ���LED�������l(f��)�������10~20MA�������LED�Ĺ��������2mA���£������c��ͨ�l(f��)�����ͬ�������ψD���҂���֪����(d��ng)Q1~Q8���_������ƽ����ƽ�r(sh��)��LED�l(f��)�⡣ͨ�^LED������s�飨VCC - Vd��/ RA2 ������Vd��LED��(d��o)ͨ��ĉ������s��1.7V���ҡ��@��(g��)��(d��o)ͨ��������(j��)LED�ɫ�IJ�ͬ���Լ���������Ĵ�С�IJ�ͬ����(hu��)��һ���IJ�e������һЩ����(sh��)�ǾW(w��ng)�����˜y�����ģ�����҅����� �tɫ�ĉ�����1.82-1.88V�����5-8mA�� �Gɫ�ĉ�����1.75-1.82V�����3-5mA�� ��ɫ�ĉ�����1.7-1.8V�����3-5mA �� �mɫ�ĉ�����3.1-3.3V�����8-10mA�� ��ɫ�ĉ�����3-3.2V�����10-15mA�� (���늉�5V��LEDֱ����5mm)
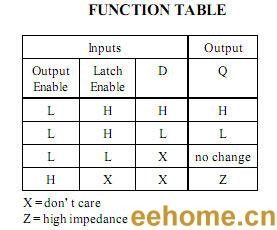
74HC573��ֵ�����£� ͨ�^�@��(g��)��ֵ���҂����Կ�������(d��ng)OutputEnable���_�ӵ��ƽ�ĕr(sh��)����LatchEnable���_����ƽ�ĕr(sh��)��Q���ƽ�cD���ƽ��ͬ���Y(ji��)���҂���LEDӲ���B�ӈD����֪��LED_CS�˞���ƽ�r(sh��)��P0���ƽ��׃����Q�˵��ƽ��׃�����M(j��n)������LED������׃�������چ�Ƭ�C(j��)���(q��)��(d��ng)�������ޣ��ڴˣ�74HC573����Ҫ���þ�����һ��(g��)ݔ���(q��)��(d��ng)�����á���Ҫע����ǣ�ͨ�^74HC573���������������Ƶģ���t���ܕ�(hu��)����74HC573�@��(g��)оƬ�� �����@��(g��)�D�Ǐ�74HC573��DATASHEET�н�ȡ�����ģ����Ͽ��Կ�����ÿ��(g��)���_���Sͨ�^����������35mA ����(g��)оƬ���Sͨ�^����������75mA�����҂��O(sh��)Ӌ(j��)����(y��ng)���(q��)��(d��ng)�·�r(sh��)���@Щ����(sh��)���ஔ(d��ng)��Ҫ�ģ������������ױ����W(xu��)�������Եĵط���ͬ�r(sh��)���O(sh��)Ӌ(j��)�ĕr(sh��)��Ҫ����һ���������������������f��(g��)���_���Sͨ�^�������35mA������O(sh��)Ӌ(j��)��35mA���@��(g��)�r(sh��)���㑪(y��ng)ԓ���O(sh��)Ӌ(j��)������ֵ����20mA���Ҳ��ܱ��C�܉�(w��n)���Ĺ��������O(sh��)Ӌ(j��)����(y��ng)�(q��)��(d��ng)�·�r(sh��)��(y��ng)ԓ�м�(x��)��xоƬ�Ĕ�(sh��)��(j��)�փԣ��˽�ÿ��(g��)���_���(q��)��(d��ng)�������Լ�����(g��)оƬ���(q��)��(d��ng)������ �˽�������(y��ng)��Ӳ�����҂��ف������(q��)��(d��ng)���� ���ȶ��xLED�Ľӿ�
#define LED P0
Ȼ������糣��(sh��)���xһ��(g��)�꣬��Ӳ���B�ӈD���ԣ���(d��ng)P0ݔ������ƽ�r(sh��)��LED����P0ݔ������ƽ�r(sh��)��LEDϨ�硣
#define LED_ON() LED = 0x00 //����LED��
#define LED_OFF() LED = 0xff //����LEDϨ��
���浽�����c(di��n)�ˣ�����ԓ���ጷ�CPU�����������ӕr(sh��)�յȴ��@�ӵ������ء��ܺ��Σ��҂�?y��u)�ϵ�y(t��ng)�a(ch��n)��һ��(g��)1MS�ĕr(sh��)��(bi��o)���ٶ�LED��Ҫ��500MS��Ϩ��500MS����ô�҂����Ԍ��@��(g��)1MS�ĕr(sh��)��(bi��o)�M(j��n)��Ӌ(j��)��(sh��)����(d��ng)�@��(g��)Ӌ(j��)��(sh��)ֵ�_(d��)��500�r(sh��)������ԓӋ(j��)��(sh��)ֵ��ͬ�r(sh��)��LED�Ġ�B(t��i)��׃��
unsigned int g_u16LedTimeCount = 0 ; //LEDӋ(j��)��(sh��)��
unsigned char g_u8LedState = 0 ; //LED��B(t��i)��(bi��o)־, 0��ʾ����1��ʾϨ��
void LedProcess(void)
{
if(0 == g_u8LedState) //���LED�Ġ�B(t��i)�������t�c(di��n)��LED
{
LED_ON() ;
}
else //��tϨ��LED
{
LED_OFF() ;
}
}
void LedStateChange(void)
{
if(g_bSystemTime1Ms) //ϵ�y(t��ng)1MS�r(sh��)��(bi��o)��
{
g_bSystemTime1Ms = 0 ;
g_u16LedTimeCount++ ; //LEDӋ(j��)��(sh��)����һ
if(g_u16LedTimeCount >= 500) //Ӌ(j��)��(sh��)�_(d��)��500,��500MS����,��׃LED�Ġ�B(t��i)��
{
g_u16LedTimeCount = 0 ;
g_u8LedState = ! g_u8LedState ;
}
}
}
������һ��(g��)׃���]���ᵽ������g_bSystemTime1Ms ���@��(g��)׃�����Զ��x��λ׃������������׃�������҂��Ķ��r(sh��)���Дຯ��(sh��)�Ќ�����λ����������(sh��)ʹ��ԓ׃����(y��ng)ԓ�����(f��)λ(��0) �� �҂���������(sh��)�Ϳ��Ԍ���������ʽ(ʾ����a)
void main(void)
{
while(1)
{
LedProcess() ;
LedStateChange() ;
}
}
��?y��n)�LED�������ߜ���ه��LED��B(t��i)׃��(g_u8LedState)�ĸ�׃������B(t��i)׃���ĸ�׃������ه��LEDӋ(j��)��(sh��)����Ӌ(j��)��(sh��)ֵ(g_u16LedTimeCount ��ֻ��Ӌ(j��)��(sh��)ֵ�_(d��)��һ����B(t��i)׃���Ÿ�׃)���ԣ��ɂ�(g��)����(sh��)���]�ж���CPU�ĵط����҂�����^��β����һ������(g��)��������̡� �������Ȉ�(zh��)��LedProcess() ;����(sh��) ��?y��n)�g_u8LedState �ij�ʼֵ��0 (Ҋ���x������ȫ��׃�����ڶ��x�ĕr(sh��)����ýo��һ��(g��)�_����ֵ)����LED���c(di��n)����Ȼ���˳�LedStateChange()����(sh��)����(zh��)����һ��(g��)����(sh��)LedStateChange() ���ں���(sh��)LedStateChange()��(n��i)�������Д�1MS��ϵ�y(t��ng)�r(sh��)��(bi��o)�Ƿ��ˣ�����]�е���ֱ���˳�����(sh��)��������ˣ��Ͱѕr(sh��)��(bi��o)��0�Ա���һ��(g��)�r(sh��)��(bi��o)��Ϣ�ĵ�����ͬ�r(sh��)��LEDӋ(j��)��(sh��)����һ��Ȼ�����Д�LEDӋ(j��)��(sh��)���Ƿ��_(d��)�҂��A(y��)����Ҫ��ֵ500������]�У��t�˳�����(sh��)������У���Ӌ(j��)��(sh��)����0���Ա��´�����Ӌ(j��)��(sh��)��ͬ�r(sh��)��LED��B(t��i)׃��ȡ����Ȼ���˳�����(sh��)�� ����������(g��)���̿���֪����CPU���������飬���nj�һЩӋ(j��)��(sh��)����һ��Ȼ�����(j��)�l����׃��B(t��i)���ٸ���(j��)�@��(g��)��B(t��i)��Q���Ƿ��c(di��n)��LED���@Щ����(sh��)��(zh��)�������ĕr(sh��)�g�����ஔ(d��ng)�̵ģ������������߀����������(sh��)���tCPU��(hu��)혴�����(zh��)����ȥ�����������ĺ���(sh��)(����е�Ԓ)ҲҪ��ȡͬ�ӵĴ�ʩ�����C�䲻����CPU�����ȫ�������@�N�����O(sh��)Ӌ(j��)����ô���ڲ��Ƿdz������ϵ�y(t��ng)���҂���ϵ�y(t��ng)���f���Ա��C����(g��)�΄�(w��)(����(g��)����(sh��))ͬ�r(sh��)��(zh��)�С�ϵ�y(t��ng)�Č�(sh��)�r(sh��)�Եõ���һ���ı��C���ĺ��^�Ͽ��������Ƕ���(g��)�΄�(w��)���l(f��)��(zh��)�С� ���ˣ��@һ�¾͵��˞�ֹ���҂����Y(ji��)һ�£���������Щ��Ҫע��İɡ� (1) �oՓʲô�r(sh��)���҂���Ҫ�Ԍ�(sh��)�H��(y��ng)�õĽǶ�ȥ���]����ľ�����
(2) �oՓʲô�r(sh��)��ҪCPU�װ����M(f��i)�ȴ����������ӕr(sh��)(���^1MS)�@�ӵĵط���
(3) �O(sh��)Ӌ(j��)����(y��ng)�(q��)��(d��ng)�·�r(sh��)��(y��ng)ԓ�м�(x��)��xоƬ�Ĕ�(sh��)��(j��)�փԣ��˽�ÿ��(g��)���_���(q��)��(d��ng)�������Լ�����(g��)оƬ���(q��)��(d��ng)������
(4) ����Ҫ���ǣ����ȥጷ�CPU(�������µ�����)���@�nj����ϸ����Ļ��A(ch��)��
������������a(������ӹ��̎�֮�ҵĆ�Ƭ�C(j��)�_�l(f��)��)
- #include<reg52.h>
- sbit LED_SEG = P1^4; //��(sh��)�a�ܶ��x
- sbit LED_DIG = P1^5; //��(sh��)�a��λ�x
- sbit LED_CS11 = P1^6; //led����λ
- sbit ir=P1^7;
- #define LED P0 //���xLED�ӿ�
- bit g_bSystemTime1Ms = 0 ; // 1MSϵ�y(t��ng)�r(sh��)��(bi��o)
- unsigned int g_u16LedTimeCount = 0 ; //LEDӋ(j��)��(sh��)��
- unsigned char g_u8LedState = 0 ; //LED��B(t��i)��(bi��o)־, 0��ʾ����1��ʾϨ��
- #define LED_ON() LED = 0x00 ; //����LED��
- #define LED_OFF() LED = 0xff ; //����LEDϨ��
- void Timer0Init(void)
- {
- TMOD &= 0xf0 ;
- TMOD |= 0x01 ; //���r(sh��)��0������ʽ1
- TH0 = 0xfc ; //���r(sh��)����ʼֵ
- TL0 = 0x66 ;
- TR0 = 1 ;
- ET0 = 1 ;
- }
- void LedProcess(void)
- {
- if(0 == g_u8LedState) //���LED�Ġ�B(t��i)�������t�c(di��n)��LED
- {
- LED_ON() ;
- }
- else //��tϨ��LED
- {
- LED_OFF() ;
- }
- }
- void LedStateChange(void)
- {
- if(g_bSystemTime1Ms) //ϵ�y(t��ng)1MS�r(sh��)��(bi��o)��
- {
- g_bSystemTime1Ms = 0 ;
- g_u16LedTimeCount++ ; //LEDӋ(j��)��(sh��)����һ
- if(g_u16LedTimeCount >= 500) //Ӌ(j��)��(sh��)�_(d��)��500,��500MS����,��׃LED�Ġ�B(t��i)��
- {
- g_u16LedTimeCount = 0 ;
- g_u8LedState = ! g_u8LedState ;
- }
- }
- }
- void main(void)
- {
- Timer0Init() ;
- EA = 1 ;
- LED_CS11 = 1 ; //74HC595ݔ�����S
- LED_SEG = 0 ; //��(sh��)�a�ܶ��x��λ�x��ֹ(��?y��n)�������LED����P0��)
- LED_DIG = 0 ;
- while(1)
- {
- LedProcess() ;
- LedStateChange() ;
- }
- }
- void Time0Isr(void) interrupt 1
- {
- TH0 = 0xfc ; //���r(sh��)�������x��ֵ
- TL0 = 0x66 ;
- g_bSystemTime1Ms = 1 ; //1MS�r(sh��)��(bi��o)��(bi��o)־λ��λ
- }
�ڶ���----ģ�K�����̳��R(sh��) �õ��_ʼ�dzɹ���һ�� ͨ�^��һ�µČW(xu��)��(x��)���������ѽ�(j��ng)����������ڳ�����ጷ�CPU�ˡ�ϣ���܉��^�m(x��)��(ji��n)����ȥ��һ��(g��)���õ��_ʼ�dzɹ���һ�롣�҂�����������һ�ж��Ǟ����چ�Ƭ�C(j��)���������ĸ��á� ��Մ?w��)���������}֮ǰ�����f������ǰ��һЩ��(j��ng)�v���ڄ��_ʼ���|��C�Z�Գ���ĕr(sh��)�����ڌW(xu��)��(x��)��(n��i)�����ޣ����ij����Ǻܴ�һ��Ҳ�͎װ��ж��ӡ��������еij��������һ��(g��)Դ�ļ����档ӛ���Ǖr(sh��)���һ���ӌW(xu��)У���һ��(g��)����O(sh��)Ӌ(j��)��ِ���{(di��o)ԇ��һ��(g��)�����ڣ����г����������Ō���1000�У��L�L��һ��(g��)�ļ������Ϟg�[����Ҫ�ð��졣�����e(cu��)�`���ε��Z���e(cu��)�`߀�ö�λ������һЩ�e(cu��)�`�������Ұ�����ҵĵ����ǂ�(g��)�r(sh��)���_ʼ֪����ģ�K�������@��(g��)�|����Ҳ�Lԇ���_ʼ�ѳ����ģ�K���������_ʼ�ǰ���ͬ���ܵ�һЩ����(sh��)(Ʃ��1602Һ�����(q��)��(d��ng))ȫ������һ��(g��)�^�ļ�(.h)�ļ����棬Ȼ����Ҫ�{(di��o)�õĵط������M(j��n)ȥ�����Ǻܿ�l(f��)�F(xi��n)�@�N������������ԣ��������؏�(f��)�������e(cu��)�`�� �����{(di��o)������Ҳ�ܲ����㡣�ܿ���ٵ�����O(sh��)Ӌ(j��)��ِ���R�ˣ��W(xu��)У���҂��Ć�Ƭ�C(j��)ܛ�������M(j��n)����һЩ��Ӗ(x��n)�����ڌW(xu��)У�v��텢�Ӈ�ِ��ʡِ����˷e����һ����(sh��)�����(q��)��(d��ng)ģ�K����Щ���ӣ��ώ�ÿ�춼��(hu��)����һ�������΄�(w��)���҂����@Щģ�K�M�����������һ�����ܡ���������Щ����ģ�K�����̵���Ӗ(x��n)��ʹ�Ҍ���ģ�K���������˸��M(j��n)һ�����J(r��n)�R(sh��)�����ҳ���Ҏ(gu��)��Ҳ�_ʼ����ע���������˺�����ӣ��oՓ����Ĵ�С��������ģ�K�����̵ķ�ʽȥ���������Lһ�Εr(sh��)�g�ԁ���һֱ�І�Ƭ�C(j��)�ۺ�����QQ�Ϻ���һ�������Еr(sh��)��������(hu��)�l(f��)�^��һЩ�І��}�ij���Դ�ļ�����?gu��)�æ��һ�¡�ͬ�����L�L��һ��(g��)�ļ������������O��Ҏ(gu��)�������^����������(sh��)��ʹ�࣬�f��(sh��)Ԓ��߀�治�������½o������һ��(g��)����һЩ����Ԓ�����٣���?y��n)����^�e����һ������ģ�K�������һ��(g��)�µ�ϵ�y(t��ng)�r(sh��)��ֻ��Ҫ����(j��)�όӹ��������ڵ�ģ�K��֧���£����Ժܿ췽�����ɡ�������Ҫ���^��β��һ�uһ�ߵ����¾�������ˣ�Ҳ���Կ���ģ�K�����̵�һ��(g��)��̎�����ǿ��؏�(f��)�����ʸߡ������҂����_ģ�K�������漆��һ�Q������Ŀ�� C�Z��Դ�ļ� *.c ��
�ᵽC�Z��Դ�ļ�����Ҷ�����(hu��)İ������?y��n)��҂�ƽ�����ij�����a�������@��(g��)XX.C�ļ����档���g��Ҳ���Դ��ļ����M(j��n)�о��g����������(y��ng)��Ŀ��(bi��o)�ļ�������ģ�K�����̵ĽM�ɻ��A(ch��)���҂���Ҫ��(sh��)�F(xi��n)�����й��ܵ�Դ���a�����@��(g��)�ļ�������ģ�K����(y��ng)ԓ���Կ�����һ��(g��)�ں��ӡ����҂�ֻ�P(gu��n)��ģ�K�ṩ�Ĺ��ܣ�������ģ�K��(n��i)���Č�(sh��)�F(xi��n)��(x��)��(ji��)���ñ��҂��I��һ���֙C(j��)���҂�ֻ��Ҫ��(hu��)���֙C(j��)�ṩ�Ĺ��ܼ��ɣ�����Ҫ֪��������ΰѶ��Űl(f��)��ȥ�ģ����푑�(y��ng)�҂����I��ݔ�룬�@Щ�^�̌��҂��Ñ����ԣ�������һ��(g��)�ں��ӡ�
�ڴ�Ҏ(gu��)ģ�����_�l(f��)�У�һ��(g��)�����ɺܶ���(g��)ģ�K�M�ɣ��ܿ��ܣ��@Щģ�K�ľ����΄�(w��)�����䵽��ͬ���ˡ������ھ����@��(g��)ģ�K�ĕr(sh��)��ܿ��ܾ���Ҫ���õ��e�ˌ��õ�ģ�K�Ľ�ڣ��@��(g��)�r(sh��)���҂��P(gu��n)�ĵ��ǣ�����ģ�K��(sh��)�F(xi��n)��ʲô�ӵĽӿڣ���ԓ���ȥ�{(di��o)�ã�����ģ�K��(n��i)������νM���ģ������Ҷ��ԣ��o���^���P(gu��n)ע������ӿڵĆ�һ�ԣ��Ѳ���Ҫ�ļ�(x��)��(ji��)�M���܌��ⲿ���������������҂�����Ҫע��ĵط��� C�Z���^�ļ� *.h
Մ����ģ�K�����̣���Ȼ��(hu��)�漰�����ļ����g��Ҳ���ǹ��̾��g�����@�ӵ�һ��(g��)ϵ�y(t��ng)�У�������(hu��)�ж���(g��)C�ļ�������ÿ��(g��)C�ļ������ò��M��ͬ�����҂���C�ļ��У�������Ҫ�����ṩ�ӿڣ���˱����һЩ����(sh��)������׃���ṩ�o�ⲿ�����ļ��M(j��n)���{(di��o)�á� ���O(sh��)�҂���һ��(g��)LCD.C�ļ������ṩ�������LCD���(q��)��(d��ng)����(sh��)
LcdPutChar(char cNewValue) ; //�ڮ�(d��ng)ǰλ��ݔ��һ��(g��)�ַ�
�����҂�������һ��(g��)�ļ�����Ҫ�{(di��o)�ô˺���(sh��)����ô�҂�ԓ������أ�
�^�ļ������������ڴˡ����ԷQ���һ�ݽӿ������ļ������ļ���(n��i)������(y��ng)ԓ�����κΌ�(sh��)�|(zh��)�Եĺ���(sh��)���a���҂������@��(g��)�^�ļ�����ɞ�һ���f�������f���ă�(n��i)�ݾ����҂���ģ�K�����ṩ�Ľӿں���(sh��)�����ǽӿ�׃����ͬ�r(sh��)ԓ�ļ�Ҳ������һЩ����Ҫ�ĺ궨�x�Լ�һЩ�Y(ji��)��(g��u)�w����Ϣ���x�_���@Щ��Ϣ���ܿ��ܾ͟o������ʹ�ýӿں���(sh��)�����ǽӿ�׃�������ǿ���ԭ�t�ǣ���ԓ���֪������Ϣ�Ͳ���(y��ng)ԓ���F(xi��n)���^�ļ��������{(di��o)��ģ�K��(n��i)�ӿں���(sh��)�����ǽӿ�׃������횵���Ϣ��һ��Ҫ���F(xi��n)���^�ļ����t�����͟o�����_���{(di��o)���҂��ṩ�Ľӿڹ��ܡ���������ⲿ����(sh��)�����ļ��{(di��o)���҂��ṩ�Ľӿڹ��ܣ��ͱ�횰����҂��ṩ���@��(g��)�ӿ������ļ�----���^�ļ���ͬ�r(sh��)���҂�����ģ�KҲ��Ҫ�����@��ģ�K�^�ļ�(��?y��n)��������ģ�KԴ�ļ�������Ҫ�ĺ궨�x�����ǽY(ji��)��(g��u)�w)���ñ��҂�ƽ�����õ��ļ�����һʽ����һ�ӣ�ģ�K����Ҳ��Ҫ�����@��(g��)�^�ļ��� �����҂������x�@��(g��)�^�ļ���һ����f���^�ļ������֑�(y��ng)ԓ�cԴ�ļ������ֱ���һ�£��@���҂������������֪���Ă�(g��)�^�ļ����Ă�(g��)Դ�ļ���������
���DZ�õ���LCD.C���^�ļ�LCD.h ���(n��i)�����¡�
#ifndef _LCD_H_
#define _LCD_H_
extern LcdPutChar(char cNewValue) ;
#endif
�@�c�҂���Դ�ļ��ж��x����(sh��)�r(sh��)���c(di��n)��ơ���ͬ���ǣ�����ǰ��������extern �����������һ��(g��)�ⲿ����(sh��)�����Ա��ⲿ����ģ�K�M(j��n)���{(di��o)�á�
#ifndef _LCD_H_
#define _LCD_H_
#endif
�@��(g��)�חl�l�����g�ͺ궨�x�Ǟ��˷�ֹ�؏�(f��)�����������Ѓɂ�(g��)��ͬԴ�ļ���Ҫ�{(di��o)��LcdPutChar(char cNewValue)�@��(g��)����(sh��)�������քe��ͨ�^#include ��Lcd.h�����@��(g��)�^�ļ��������M(j��n)ȥ���ڵ�һ��(g��)Դ�ļ��M(j��n)�о��g�r(sh��)�����ڛ]�ж��x�^ _LCD_H_ ��� #ifndef _LCD_H_ �l�����������Ƕ��x_LCD_H_ ����������������M(j��n)ȥ���ڵڶ���(g��)�ļ����g�r(sh��)�����ڵ�һ��(g��)�ļ������r(sh��)���ѽ�(j��ng)��_LCD_H_���x�^�ˡ����#ifndef _LCD_H_ ������������(g��)�^�ļ���(n��i)�ݾ͛]�б����������O(sh��)�]���@�ӵėl�����g�Z�䣬��ô�ɂ�(g��)�ļ���������extern LcdPutChar(char cNewValue) ; �͕�(hu��)�����؏�(f��)�������e(cu��)�`��
���ò��f��typedef
�ܶ������ƺ�����(x��)�T���������������Z��팦��(sh��)��(j��)����M(j��n)�ж��x
#define uint unsigned int
#define uchar unsigned char
Ȼ���ڶ��x׃���ĕr(sh��)�� ֱ���@��ʹ��
uint g_nTimeCounter = 0 ;
���ɷ��J(r��n)���@�Ӵ_��(sh��)�ܷ��㣬���Ҍ�����ֲ����Ҳ��һ���ķ����ԡ����ǿ��]�����@�N��r��߀��(hu��) �@ô�J(r��n)��
#define PINT unsigned int * //���xunsigned int ָ����
PINT g_npTimeCounter, g_npTimeState ;
��ô�㵽���Ƕ��x�˃ɂ�(g��)unsigned int �͵�ָ�׃����߀��һ��(g��)ָ�׃����һ��(g��)����׃���أ�����ij�������ʲô�أ��붨�x�ɂ�(g��)unsigned int �͵�ָ�׃���������@�ӣ���ô��Ӌ(j��)�^���þ͕�(hu��)��̎ץ�����e(cu��)�`�ˡ�
�c�ҵ���C�Z���ѽ�(j��ng)���҂����]�����@һ�c(di��n)��typedef ���Ǟ�˶��������˽o׃����һ��(g��)�e���҂����������µ��Z��
typedef unsigned int uint16 ; //�oָ��o��̖(h��o)����׃����һ��(g��)�e�� uint16
typedef unsigned int * puint16 ; //�oָ��o��̖(h��o)����׃��ָ���һ��(g��)�e�� puint16
���҂����x׃���r(sh��)�������@�Ӷ��x�ˣ�
uint16 g_nTimeCounter = 0 ; //���xһ��(g��)�o��̖(h��o)������׃��
puint16 g_npTimeCounter ; //���xһ��(g��)�o��̖(h��o)������׃����ָ�
���҂�ʹ��51��Ƭ�C(j��)��C�Z�Ծ��̵ĕr(sh��)������׃���ķ�����16λ�����ڻ���32��̎���µ�����׃����32λ�������҂���8λ��Ƭ�C(j��)�¾�����һЩ���a��Ҫ��ֲ��32λ��̎�����ϣ���ô�ܿ����҂�����Ҫ��Դ�ļ��е�̎��׃������Ͷ��x���@��һ������Ĺ��������˿��]����Ŀ���ֲ�ԣ���һ�_ʼ���҂��͑�(y��ng)ԓ�B(y��ng)�����õ���(x��)�T����׃���Ąe���M(j��n)�ж��x��
����8λ��Ƭ�C(j��)��ƽ�_(t��i)�£�������һ��(g��)׃�����x
uint16 g_nTimeCounter = 0 ;
�����ֲ32��Ƭ�C(j��)��ƽ�_(t��i)�£���Ҫ��ķ������f��16λ��
����ֱ����uint16 �Ķ��x����
typedef unsigned short int uint16 ;
�@�ӾͿ����ˣ�������Ҫ��Դ�ļ�̎̎���Ҳ��ġ�
�����õĔ�(sh��)��(j��)���ȫ�����ô˷N�������x���γ�һ��(g��)�^�ļ��������҂��Ժ�ֱ���{(di��o)�á�
�ļ��� MacroAndConst.h
���(n��i)�����£�
#ifndef _MACRO_AND_CONST_H_
#define _MACRO_AND_CONST_H_
typedef unsigned int uint16;
typedef unsigned int UINT;
typedef unsigned int uint;
typedef unsigned int UINT16;
typedef unsigned int WORD;
typedef unsigned int word;
typedef int int16;
typedef int INT16;
typedef unsigned long uint32;
typedef unsigned long UINT32;
typedef unsigned long DWORD;
typedef unsigned long dword;
typedef long int32;
typedef long INT32;
typedef signed char int8;
typedef signed char INT8;
typedef unsigned char byte;
typedef unsigned char BYTE;
typedef unsigned char uchar;
typedef unsigned char UINT8;
typedef unsigned char uint8;
typedef unsigned char BOOL;
#endif ���ˣ��ƺ��҂�����Դ�ļ����^�ļ��ķֹ��Լ�ģ�K����������ôһ�c(di��n)�����ˡ���ô�҂��ß���F������һ�µ��҂�������LED�W�q����(sh��)�M(j��n)��ģ�K���ֲ����½M���M(j��n)�о��g�� ����һ�����҂���Ҫ��ɵĹ�����P0�����(q��)��(d��ng)��LED��1Hz���l���W�q�������õ��˶��r(sh��)�����Լ�LED�(q��)��(d��ng)ģ�K������҂����Ժ��εČ�����(g��)���̷ֳ�����(g��)ģ�K�����r(sh��)��ģ�K��LEDģ�K���Լ�������(sh��)
����(y��ng)���ļ��P(gu��n)ϵ���� main.c
Timer.h?Timer.c --
Led.h?Led.c -- ���_ʼ���¾����҂��ij���֮ǰ���Ƚo����vһ�������KEIL�н�������ģ��ɣ��@��(g��)ģ������һֱ��������ϣ���܉�o���һ�c(di��n)���l(f��)�� ����ă�(n��i)�ݾ���Ҫ�ԈDƬ�����ˡ�ͬ�r(sh��)�o�����������f�����҂���оƬAT89S52������
OK������һ��(g��)���εĹ���ģ��ͽ��������ˣ��Ժ��҂����½�Դ�ļ����^�ļ��ĕr(sh��)�Ϳ���ֱ�ӱ��浽src�ļ�Ŀ������ˡ� �����҂��_ʼ��������(g��)ģ�K�ļ��� ���Ⱦ���Timer.c �@��(g��)�ļ���Ҫ��(n��i)�ݾ��Ƕ��r(sh��)����ʼ�����Լ����r(sh��)���Д����(w��)����(sh��)�����(n��i)�����¡� #include <reg52.h>
bit g_bSystemTime1Ms = 0 ; // 1MSϵ�y(t��ng)�r(sh��)��(bi��o)
void Timer0Init(void)
{
TMOD &= 0xf0 ;
TMOD |= 0x01 ; //���r(sh��)��0������ʽ1
TH0 = 0xfc ; //���r(sh��)����ʼֵ
TL0 = 0x66 ;
TR0 = 1 ;
ET0 = 1 ;
}
void Time0Isr(void) interrupt 1
{
TH0 = 0xfc ; //���r(sh��)�������x��ֵ
TL0 = 0x66 ;
g_bSystemTime1Ms = 1 ; //1MS�r(sh��)��(bi��o)��(bi��o)־λ��λ
} ������Led.c�ļ�����Ҫ�{(di��o)���҂���g_bSystemTime1Ms׃����ͬ�r(sh��)������(sh��)��Ҫ�{(di��o)��Timer0Init()��ʼ������(sh��)�����ԑ�(y��ng)ԓ���@��(g��)׃���ͺ���(sh��)���^�ļ������ⲿ�����Է�����������(sh��)�{(di��o)�á� Timer.h ��(n��i)�����¡�
#ifndef _TIMER_H_
#define _TIMER_H_
extern void Timer0Init(void) ;
extern bit g_bSystemTime1Ms ;
#endif
����˶��r(sh��)��ģ�K���҂��_ʼ����LED�(q��)��(d��ng)ģ�K��
Led.c ��(n��i)�����£�
#include <reg52.h>
#include "MacroAndConst.h"
#include "Led.h"
#include "Timer.h"
static uint16 g_u16LedTimeCount = 0 ; //LEDӋ(j��)��(sh��)��
static uint8 g_u8LedState = 0 ; //LED��B(t��i)��(bi��o)־, 0��ʾ����1��ʾϨ��
#define LED P0 //���xLED�ӿ�
#define LED_ON() LED = 0x00 ; //����LED��
#define LED_OFF() LED = 0xff ; //����LEDϨ��
void LedProcess(void)
{
if(0 == g_u8LedState) //���LED�Ġ�B(t��i)�������t�c(di��n)��LED
{
LED_ON() ;
}
else //��tϨ��LED
{
LED_OFF() ;
}
}
void LedStateChange(void)
{
if(g_bSystemTime1Ms) //ϵ�y(t��ng)1MS�r(sh��)��(bi��o)��
{
g_bSystemTime1Ms = 0 ;
g_u16LedTimeCount++ ; //LEDӋ(j��)��(sh��)����һ
if(g_u16LedTimeCount >= 500) //Ӌ(j��)��(sh��)�_(d��)��500,��500MS����,��׃LED�Ġ�B(t��i)��
{
g_u16LedTimeCount = 0 ;
g_u8LedState = ! g_u8LedState ;
}
}
}
�@��(g��)ģ�K����Ľ��ֻ�Ѓɂ�(g��)����(sh��)�����������(y��ng)��Led.h ����Ҫ������(y��ng)������
Led.h ��(n��i)�ݣ�
#ifndef _LED_H_
#define _LED_H_
extern void LedProcess(void) ;
extern void LedStateChange(void) ;
#endif
�@�ɂ�(g��)ģ�K��ɺ��҂�����C�ļ����ӵ������С�Ȼ���_ʼ����������(sh��)��Ĵ��a��
������ʾ��
#include <reg52.h>
#include "MacroAndConst.h"
#include "Timer.h"
#include "Led.h"
sbit LED_SEG = P1^4; //��(sh��)�a�ܶ��x
sbit LED_DIG = P1^5; //��(sh��)�a��λ�x
sbit LED_CS11 = P1^6; //led����λ
void main(void)
{
LED_CS11 = 1 ; //74HC595ݔ�����S
LED_SEG = 0 ; //��(sh��)�a�ܶ��x��λ�x��ֹ(��?y��n)�������LED����P0��)
LED_DIG = 0 ;
Timer0Init() ;
EA = 1 ;
while(1)
{
LedProcess() ;
LedStateChange() ;
}
} ���ˣ��ڶ��µ��˽Y(ji��)����
һ�������Y(ji��)һ���҂���Ҫע��ĵط���
1. C�Z��Դ�ļ�(*.c)��������ʲô
2. C�Z���^�ļ�(*.h)��������ʲô
3. typedef ������
4. ����ģ����νM��
5. ��΄�(chu��ng)��һ��(g��)��ģ�K(���ļ�)�Ĺ���
������ ���I�����Ļ��A(ch��)
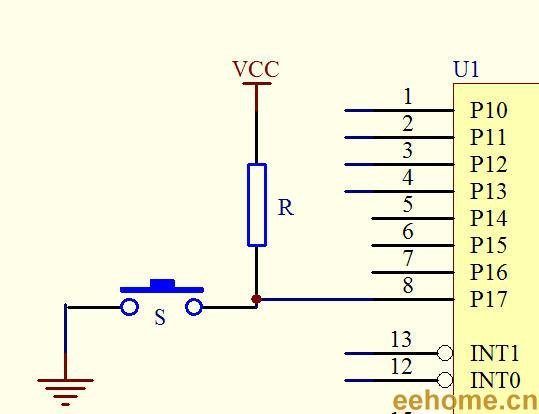
���@һ���_ʼ���҂����밴�I�����O(sh��)Ӌ(j��)�ĵ��á��ڻ��چ�Ƭ�C(j��)����Ę�(g��u)�ɵđ�(y��ng)��ϵ�y(t��ng)�У��Ñ�ݔ���DZز����ٵ�һ���֡�ݔ����Էֺܶ�N��r��Ʃ���е�ϵ�y(t��ng)֧��PS2�I�P�Ľӿڣ��е�ϵ�y(t��ng)ݔ���ǻ��ھ��a�����е�ϵ�y(t��ng)ݔ���ǻ��ڴ��ڻ���USB��������ݔ��ͨ���ȵȡ��ڸ��Nݔ��;���У�����Ҋ���ǣ����چ�(g��)���I�����Ɇ�(g��)�I�P����һ�����И�(g��u)�ɵľ���I�P(�����I�P)���҂��@һƪ����ҪӑՓ�Č�����ǻ��چ�(g��)���I�ij����O(sh��)Ӌ(j��)���Լ�����I�P�ij����� ���I�z�y��ԭ�� ��Ҋ�Ī�(d��)�����I�����^���£����Ŵ�Ҳ���İ�������N��Ҋ���_�l(f��)��W(xu��)��(x��)�����S̎���Կ�����������Ӱ�� �������Ă�(g��)���_��һ����r�£�̎��ͬһ߅�ăɂ�(g��)���_��(n��i)�����B����һ��ģ���ηֱ�ɂ�(g��)���_�Ƿ�̎��ͬһ߅�أ����Ԍ����I���D(zhu��n)�^����̎��ͬһ߅�ăɂ�(g��)���_����һ�lͻ��ľ��������B��һ���Ԙ�(bi��o)ʾ�����z�����B�ġ�����o���^��õ����Ô�(sh��)���f�ñ��Ķ��O�ܓ�λ�z�yһ�¼��ɡ�������@�c(di��n)�dz���Ҫ�������҂���PCB�ĕr(sh��)��ķ��b�����档 �������҂��Ć�Ƭ�C(j��)ϵ�y(t��ng)��I/O���B��һ�����£� ���چ�Ƭ�C(j��)I/O��(n��i)���������������������ԣ�߀����ʡ���ⲿ���ǂ�(g��)������衣���η���һ�°��I�z�y��ԭ������(d��ng)���I�]�а��µĕr(sh��)��Ƭ�C(j��)I/Oͨ�^�������R�ӵ�VCC���҂��ڳ������xȡԓI/O���ƽ�ĕr(sh��)����ֵ��1(���ƽ); ��(d��ng)���IS���µĕr(sh��)��ԓI/O���̽ӵ�GND���ڳ������xȡԓI/O���ƽ�ĕr(sh��)����ֵ��0(���ƽ) ���@�ӣ����I�İ����c�ͺ��cԓ���I���B��I/O���ƽ��׃��������(y��ng)�������Y(ji��)Փ���҂��ڳ�����ͨ�^�z�y��ԓI/O���ƽ��׃���c������֪�����I�Ƿ��£��Ķ���������(y��ng)��푑�(y��ng)��һ�п����������ã����@�ӵĆ �F(xi��n)��(sh��)�������� ���҂�ͨ�^����İ��I�z�yԭ���ó������ĽY(ji��)Փ�ĕr(sh��)���䌍(sh��)������һ��(g��)��Ҫ�Ć��}���Ǿ��ǬF(xi��n)��(sh��)�а��I���r(sh��)����ƽ׃����B(t��i)���҂��ĽY(ji��)Փ�ǻ����������r�ó����ģ�����ͬ�����@�����I���r(sh��)��?q��)��?y��ng)�ƽ׃���IJ��ΈDһ�ӣ� ����(sh��)�H�У����ڰ��I�ď�Ƭ���|�ĕr(sh��)������һ���|�;o�o���]�ϣ���߀����һ���Ķ���(d��ng)���M���@��(g��)�r(sh��)�g�dz��Ķ̕������nj����҂���(zh��)�Еr(sh��)�g��us��Ӌ(j��)���λ�����������f����̫���L�ˡ��������(sh��)�H�IJ��ΈD��(y��ng)ԓ�������@��ʾ��Dһ�ӡ�  �@�ӱ�����@��һ��(g��)���}�����O(sh��)�҂���ϵ�y(t��ng)���@�ӹ��������ڙz�y�����I���µĕr(sh��)��ij��(g��)I/O�Ġ�B(t��i)ȡ���������@�N����(d��ng)�Ĵ��ڣ�ʹ���҂����������`�Ԟ��Ƕ�ΰ��I�İ��£��Ķ���ij��(g��)I/O�Ġ�B(t��i)����ȡ�����@�������҂���Ҫ��Ч��������ԓI/O������ϵ�y(t��ng)��ij��(g��)��Ҫ�Ĉ�(zh��)�еIJ������ǽY(ji��)���������҂����ڴ��ġ����Ǻ����˱������ܛ����������(d��ng)��˼�룬�����ܺ��Σ�����(d��ng)�ĕr(sh��)�g�L����һ���ģ�ֻҪ�҂����_�@�ζ���(d��ng)�r(sh��)�ڣ��z�y��(w��n)���ĕr(sh��)����ƽ���ÿ����ˆ �����_��(sh��)���e(cu��)�����Ҍ�(sh��)�H��(y��ng)������Ч��Ҳ߀���ԡ����ǣ����N���ӵĕ����У����ᵽ���I�z�y�ĕr(sh��)��Ҳ�����f��ܛ����������������Ăδ��a��������һ�ӡ�(���O(sh��)���I���r(sh��)���ƽ��Ч)
If(0 == io_KeyEnter) //������I������
{
Delayms(20) ; //���ӕr(sh��)20ms���_����(d��ng)�r(sh��)��
If(0 == io_KeyEnter) //Ȼ���ٙz�y�����߀�Ǚz�y�����I����
{
return KeyValue ; //����İ����ˣ������Iֵ
}
else
{
return KEY_NULL //�Ƕ���(d��ng)�����ؿյ��Iֵ
}
while(0 == io_KeyEnter) ; //�ȴ����Iጷ�
}
���Ժ����ķ�������Ƶ�̎��r(sh��)�g���Ǿ������I����Ļ��A(ch��)��?է����ȥ���_��(sh��)ͦ���e(cu��)����(sh��)�H���أ��ڌ�(sh��)�H��ϵ�y(t��ng)�У�һ���Dz����S�@ô�����ġ���ʲô�أ����ȣ��@���Delayms(20) , ���������@��װȴ���20 ms �ĕr(sh��)�g��ɶҲ�]�ɣ����]���ڡ��W(xu��)��(hu��)ጷ�CPU��һ�������ἰ�Ď��c(di��n)���@�Dz���ȡ�ġ����while(0 == io_KeyEnter) ;���dz����O(sh��)Ӌ(j��)�еĴ��(�O�ٵ�������r����)���κηǘO����r�£�����Ҫʹ���@���Z��������������Ĉ�(zh��)���M(j��n)�̡�ԭ���ǵȴ����Iጷţ��Y(ji��)��CPU��һֱ�����Ķ�סԓ���I���������鶼�����ˣ����������鲻���ˆ��ͬ��e�˿ɲ���(hu��)ͬ�� ��������(d��ng)�б�Ҫ��Ĵ_��ܛ���ϵ������_��(sh��)���Ա��C���I����Ч�z�y�����ǣ��@�N�����_��(sh��)�б�Ҫ�����������@�ӵ��Ɇ�������(d��ng)�ǰ��I���µ��^���Юa(ch��n)���ģ�������I�]�а��£�����(d��ng)��(hu��)�a(ch��n)�������]�а��I���£�����(d��ng)Ҳ��(hu��)��I/O�ϳ��F(xi��n)���ҕ�(hu��)���̰��@��(g��)�������N�ˣ����h(yu��n)�����@��һ�������������Զ���(d��ng)�ij��F(xi��n)����ζ�����I�ѽ�(j��ng)���£��M���@��(g��)�ƽ߀�]�з�(w��n)��������ֻҪ�҂��z�y�����I���£������Է����Iֵ�����}���P(gu��n)�I�ǣ������(zh��)���������΄�(w��)�ĕr(sh��)���ٴΈ�(zh��)���҂��İ��I�΄�(w��)�ĕr(sh��)����(d��ng)�^��߀�]�нY(ji��)�����@�ӱ��п�������؏�(f��)�z�y�����ԣ�����ڷ����Iֵ�����؏�(f��)�z�y�������ڰ��Iһ���¾͈�(zh��)�й��ܺ���(sh��)����(d��ng)���ܺ���(sh��)�Ĉ�(zh��)�Еr(sh��)�gС�ڶ���(d��ng)�r(sh��)�g�r(sh��)����α����ٴΈ�(zh��)�й��ܺ���(sh��)���ͳɞ��҂�Ҫ���]�Ć��}�ˡ��@��һ��(g��)����Ҋ�ʣ�����Ҋ�ǵĆ��}�������o���ȥ˼���ɡ�������������(d��ng)��Ŀ���ǣ���ֹ���Iһ�ΰ��£����푑�(y��ng)��
������ ���ڠ�B(t��i)�D(zhu��n)�ƵĪ�(d��)�����I�����O(sh��)Ӌ(j��)
��һ��(g��)СҺ������߀���Ă�(g��)���I�������Ǖr(sh��)犣��[��Լ���������{(di��o)���r(sh��)�g�ĕr(sh��)�̰�+�Iÿ���{(di��o)��ֵ��һ���L���ĕr(sh��)���{(di��o)��ֵ�B�m(x��)���ӡ�С�ĕr(sh��)��ܺ��棬�@�ӵĹ��ܵ�������Ό�(sh��)�F(xi��n)���أ�������҂�����������ԭ���ɡ�
�����������İ��I����Ҫ�_(d��)����Ŀ�ģ��z�y���I���£��̰����L����ጷš���ͨ�^���I�ķ���ֵ�҂����ԫ@ȡ�����µ���Ϣ�����I����(�̰�)�����I�L�������I�B_�l(f��)�����Iጷš���֪�����߀ӛ��С�r(sh��)�����^�����犛]�У��������������CALL �C(j��)(CALL �C(j��)�������Ǻܹ��ϵĖ|���ˡ� ��B(t��i)���������S̎��Ҋ��Ʃ�����ϵĕr(sh��)���[犰�������ˣ��@��(g��)�r(sh��)�����̎�����ѵĠ�B(t��i)���R����ʹ�����ϴ������ͣ��@һϵ��������������@��(g��)��B(t��i)�������顣�����@Щ�����(hu��)ȥ��܇�����_܇ȥ�ϰ࣬�@��(g��)�r(sh��)�����̎���ϰ�;�еĠ�B(t��i)��..�����°��r(sh��)�g���ˣ����̎�������°�Ġ�B(t��i)���T���ȵȣ���ÿһ��(g��)��B(t��i)�҂�����(hu��)��һЩ��ͬ�����飬������(hu��)�����l����ʹ�҂��D(zhu��n)�Q������һ�N��B(t��i)��Ʃ���[犽����҂��ˣ��°��r(sh��)�g���˵ȵȡ����ڠ�B(t��i)�Ķ��x���l(f��)�c(di��n)��ͬ�����]�ķ���ͬ�����ߕ�(hu��)��Щ�S��(x��)��(ji��)����IJ�����Ǵ�Ġ�B(t��i)������ͬ�ġ������е�����ͬ����ѭͬ�ӵ�Ҏ(gu��)�ɣ�Ʃ�磬��һ��(g��)���ܳ�����o����֙C(j��)늳س�늣����_ʼ������̎�ڿ��ٳ�늠�B(t��i)���S����������ӣ�늉������ߣ���(d��ng)�_(d��)��Ҏ(gu��)����늉��r(sh��)������(hu��)�D(zhu��n)�Q���㉺��늡�������֮����(x��)���^�죬���(hu��)�l(f��)�F(xi��n)�����еĿ��������Ԛw�Y(ji��)��һ��(g��)��(g��)�Ġ�B(t��i)������B(t��i)��׃�Q�����D(zhu��n)�ƿ�����ijЩ�l������ͬ�r(sh��)���S��һЩ��(d��ng)���İl(f��)�����҂��İ��I����ѭͬ�ӵ�Ҏ(gu��)�ɣ������҂������ε����Lһ�����Ġ�B(t��i)�����D(zhu��n)�ƈD�� 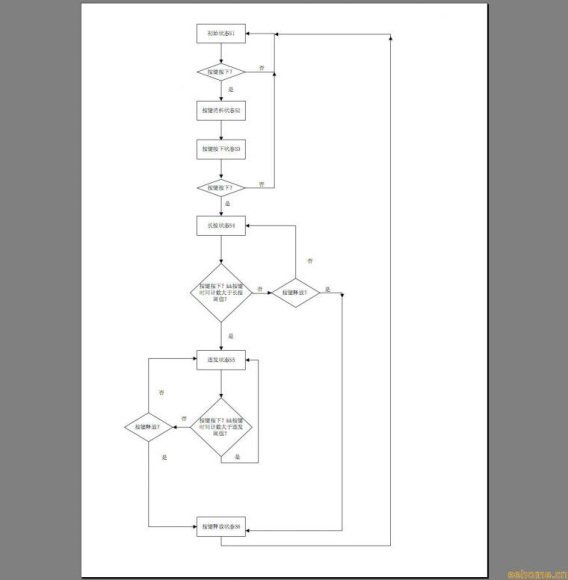
���挦��������̈D�M(j��n)�к�Ҫ�ķ����� ���Ȱ��I�����M(j��n)���ʼ��B(t��i)S1�����@��(g��)��B(t��i)�£��z�y���I�Ƿ��£�����а��£��t�M(j��n)�밴�I������B(t��i)2������һ�Έ�(zh��)�а��I����r(sh��)��ֱ���ɰ��I������B(t��i)�M(j��n)�밴�I��� �B(t��i)3���ڴˠ�B(t��i)�z�y���I�Ƿ��£�����]�а��I���£��t���س�ʼ��B(t��i)S1������Єt���Է����Iֵ��ͬ�r(sh��)�M(j��n)���L����B(t��i)S4�����L����B(t��i)��ÿ���M(j��n)�밴�I����r(sh��)��?q��)����I�r(sh��)�gӋ(j��)��(sh��)����(d��ng)Ӌ(j��)��(sh��)ֵ���^�O(sh��)���ֵ�r(sh��)�t�����L���¼��l(f��)����ͬ�r(sh��)�M(j��n)�밴�I�B_�l(f��)��B(t��i)S5��������I�Iֵ����I���t���ذ��IጷŠ�B(t��i)S6����t�^�m(x��)ͣ���ڱ���B(t��i)���ڰ��I�B_�l(f��)��B(t��i)�£�������I�Iֵ����I�t���ذ��IጷŠ�B(t��i)S6��������I�r(sh��)�gӋ(j��)��(sh��)���^�B_�l(f��)�ֵ���t�����B_�l(f��)���Iֵ������r(sh��)�gӋ(j��)��(sh��)���^�m(x��)ͣ���ڱ���B(t��i)�� �����@ô�࣬Ҳ�S���ѽ�(j��ng)��һ��(g��)ģ���ĸ����ˣ������҂��ß���F��һ�����(d��ng)�־������I�(q��)��(d��ng)����ɡ� ��������ʹ�õ�Ӳ�����B�ӈD��
Ӳ���B�Ӻܺ��Σ��Ă�(g��)��(d��)�����I�քe����P3^0------P3^3�Ă�(g��)I/O���档 ��?y��n)?1��Ƭ�C(j��)I/O�ڃ�(n��i)���Y(ji��)��(g��u)�����ƣ����xȡ�ⲿ���_��B(t��i)�ĕr(sh��)����Ҫ��˿ڌ�1.��51��Ƭ�C(j��)��(f��)λ����Ҫ�M(j��n)�д˲���Ҳ�����M(j��n)���xȡ�ⲿ���_�IJ�������ˣ��ڰ��I�Ķ˿ڛ]�Џ�(f��)�õ���r�£�����ʡ�Դ˲��E������������һЩ�����p��I/O�ڵĆ�Ƭ�C(j��)���f�������_�O(sh��)�ó�ݔ���B(t��i)���DZز����ٵ�һ��(g��)���E�� ����ij�����a��ʼ�����_��ݔ�롣
void KeyInit(void)
{
io_key_1 = 1 ;
io_key_2 = 1 ;
io_key_3 = 1 ;
io_key_4 = 1 ;
}
����(j��)���IӲ���B�Ӷ��x���I�Iֵ
#define KEY_VALUE_1 0x0e
#define KEY_VALUE_2 0x0d
#define KEY_VALUE_3 0x0b
#define KEY_VALUE_4 0x07
#define KEY_NULL 0x0f
�����҂����������I��Ӳ���(q��)��(d��ng)����
����(j��)��һ���������İ��I�z�yԭ�����҂����Ժ����ĵó����µĴ��a��
static uint8 KeyScan(void)
{
if(io_key_1 == 0)return KEY_VALUE_1 ;
if(io_key_2 == 0)return KEY_VALUE_2 ;
if(io_key_3 == 0)return KEY_VALUE_3 ;
if(io_key_4 == 0)return KEY_VALUE_4 ;
return KEY_NULL ;
}
����io_key_1�����҂����I�˿ڵĶ��x��������ʾ��
sbit io_key_1 = P3^0 ;
sbit io_key_2 = P3^1 ;
sbit io_key_3 = P3^2 ;
sbit io_key_4 = P3^3 ;
KeyScan()����Ӱ��I���(q��)��(d��ng)�����όӰ��I�����ṩһ��(g��)�ӿڣ��@���҂��������όӰ��I���躯��(sh��)���Ԏ������ľͿ����õ��҂�������������ȥʹ�ã�ʹ�ó����(f��)���Դ����ߡ�ͬ�r(sh��)��ͨ�^�����R(sh��)�Č��c��Ӳ���B�Ӿo�ܵij�����cӲ���o�P(gu��n)�Ĵ��a���_����ʹ�ó���Y(ji��)��(g��u)�Ӵ�����������ֲ��Ҳ���á����چ�Ƭ�C(j��)ij�����ԣ��܉���������(sh��)���e�Ĵ��a�����ѽ�(j��ng)����ˡ� �ھ����҂����όӰ��I���躯��(sh��)֮ǰ����Ҫ�����һЩ�궨�x��
//���x�L���I��TICK��(sh��),�Լ��B_�l(f��)�g����TICK��(sh��)
#define KEY_LONG_PERIOD 100
#define KEY_CONTINUE_PERIOD 25
//���x���I����ֵ��B(t��i)(����,�L��,�B_�l(f��),ጷ�)
#define KEY_DOWN 0x80
#define KEY_LONG 0x40
#define KEY_CONTINUE 0x20
#define KEY_UP 0x10
//���x���I��B(t��i)
#define KEY_STATE_INIT 0
#define KEY_STATE_WOBBLE 1
#define KEY_STATE_PRESS 2
#define KEY_STATE_LONG 3
#define KEY_STATE_CONTINUE 4
#define KEY_STATE_RELEASE 5
�����҂��_ʼ�����������όӰ��I���躯��(sh��)�����I�Ķ̰����L�����B����ጷŵȵȠ�B(t��i)���Д�����ڴ˺���(sh��)����ɡ����ՠ�B(t��i)�����D(zhu��n)�ƈD��Ȼ���ٿ�����ĺ���(sh��)���a�����Ը�����ȥ���⺯��(sh��)�Ĉ�(zh��)�����̡������ĺ���(sh��)���a���£�
void GetKey(uint8 *pKeyValue)
{
static uint8 s_u8KeyState = KEY_STATE_INIT ;
static uint8 s_u8KeyTimeCount = 0 ;
static uint8 s_u8LastKey = KEY_NULL ; //���水�Iጷŕr(sh��)����Iֵ
uint8 KeyTemp = KEY_NULL ;
KeyTemp = KeyScan() ; //�@ȡ�Iֵ
switch(s_u8KeyState)
{
case KEY_STATE_INIT :
{
if(KEY_NULL != (KeyTemp))
{
s_u8KeyState = KEY_STATE_WOBBLE ;
}
}
break ;
case KEY_STATE_WOBBLE : //����
{
s_u8KeyState = KEY_STATE_PRESS ;
}
break ;
case KEY_STATE_PRESS :
{
if(KEY_NULL != (KeyTemp))
{
s_u8LastKey = KeyTemp ; //�����Iֵ,�Ա���ጷŰ��I��B(t��i)�����Iֵ
KeyTemp |= KEY_DOWN ; //���I����
s_u8KeyState = KEY_STATE_LONG ;
}
else
{
s_u8KeyState = KEY_STATE_INIT ;
}
}
break ;
case KEY_STATE_LONG :
{
if(KEY_NULL != (KeyTemp))
{
if(++s_u8KeyTimeCount > KEY_LONG_PERIOD)
{
s_u8KeyTimeCount = 0 ;
KeyTemp |= KEY_LONG ; //�L���I�¼��l(f��)��
s_u8KeyState = KEY_STATE_CONTINUE ;
}
}
else
{
s_u8KeyState = KEY_STATE_RELEASE ;
}
}
break ;
case KEY_STATE_CONTINUE :
{
if(KEY_NULL != (KeyTemp))
{
if(++s_u8KeyTimeCount > KEY_CONTINUE_PERIOD)
{
s_u8KeyTimeCount = 0 ;
KeyTemp |= KEY_CONTINUE ;
}
}
else
{
s_u8KeyState = KEY_STATE_RELEASE ;
}
}
break ;
case KEY_STATE_RELEASE :
{
s_u8LastKey |= KEY_UP ;
KeyTemp = s_u8LastKey ;
s_u8KeyState = KEY_STATE_INIT ;
}
break ;
default : break ;
}
*pKeyValue = KeyTemp ; //�����Iֵ
}
�P(gu��n)���@��(g��)����(sh��)��(n��i)���ļ�(x��)��(ji��)�Ҳ������㻨�^��Pīȥ�v�⡣���������I��B(t��i)�����D(zhu��n)�ƈD��Ȼ��ȥ��������a�����(hu��)�l(f��)�F(xi��n)�䌍(sh��)˼·�dz������������������صģ�Ī�Ǿ��nj�����(g��)�����Լ�������Ȼ�������ʲô�@��(g��)�ط�Ҫ�@�ӌ�������˼���đB(t��i)��ȥ��x�������(hu��)�l(f��)�F(xi��n)�Լ��ij���ˮƽ��(hu��)��������ߡ������Ҹ�ϣ���������܉��J(r��n)�J(r��n)����Ŀ��꣬Ȼ��˼����Ҳ�S���(hu��)�ի@���ࡣ ������ô�ӣ��@�ӵ�һ��(g��)�����ѽ�(j��ng)����˱����_ʼ�r(sh��)��Ҫ��Ĺ��ܣ����£��L�����B����ጷš���(sh��)�ϣ�����������@�N���ڠ�B(t��i)�D(zhu��n)�Ƶ�˼�룬���(hu��)�l(f��)�F(xi��n)Ҫ��(sh��)�F(xi��n)�������I���ܣ�Ʃ�磬���I���£������I�ȵȣ����ஔ(d��ng)���Σ�����һ�£��҂���ȥ��(sh��)�F(xi��n)���� �����������Ҿ������@�ӵ�һ�δ��a������ʾ�Ҍ�(sh��)�F(xi��n)�İ��I���ܡ�
void main(void)
{
uint8 KeyValue = KEY_NULL;
uint8 temp = 0 ;
LED_CS11 = 1 ; //��ˮ��ݔ�����S
LED_SEG = 0 ;
LED_DIG = 0 ;
Timer0Init() ;
KeyInit() ;
EA = 1 ;
while(1)
{
Timer0MainLoop() ;
KeyMainLoop(&KeyValue) ;
if(KeyValue == (KEY_VALUE_1 | KEY_DOWN)) P0 = ~1 ;
if(KeyValue == (KEY_VALUE_1 | KEY_LONG)) P0 = ~2 ;
if(KeyValue == (KEY_VALUE_1 | KEY_CONTINUE)) { P0 ^= 0xf0;}
if(KeyValue == (KEY_VALUE_1 | KEY_UP)) P0 = 0xa5 ;
}
}
��ס��һ��(g��)�I�����������Ŀ���P0�����ӵ�LED�Ġ�B(t��i)��׃������(d��ng)���I���r(sh��)��һ��(g��)LED�������ȴ�2 S��ڶ���(g��)LED������һ��(g��)Ϩ�磬��ʾ�L���¼��l(f��)�������^500 ms ��5~8��(g��)LED�W�q����ʾ�B���¼��l(f��)������(d��ng)ጷŰ��I�r(sh��)��P0�����ӵ�LED�Ġ�B(t��i)�飺
���������������磬�@Ҳ����P0 = 0xa5�@�l�Z��Ĺ��ܡ�
������--���΄�(w��)�h(hu��n)���µĔ�(sh��)�a�ܾ����O(sh��)Ӌ(j��) ��(sh��)�a���ڌ�(sh��)�H��(y��ng)���зdz��V������������ijЩ���ɱ������ƵĈ��ϡ�����һ��(g��)���õ�LED��������ô�ĺ��Ρ�����(j��ng)�����@���f�^������Ô�(sh��)�a�ܺͰ��I����һ��(g��)���Ŀ����{(di��o)���ĕr(sh��)犳�������ô��Ć�Ƭ�C(j��)�������T��60%�ˡ���Ԓ�����Ų��ɡ��������^�ܶ���Ƭ�C(j��)�Đۺ��ߣ����������f��Ƭ�C(j��)���ѽ�(j��ng)�����ˣ�ԓ����M(j��n)һ���ČW(xu��)��(x��)��ȥ�أ��Ҳ������ڻش������Ć��}�����dž���������(hu��)������(sh��)�a�ܵ��(q��)��(d��ng)�����˰ɣ����š�����(hu��)�������I�����˰ɣ����š����ã��ҽo���һ��(g��)С�}Ŀ������һ�¡��ð��I�͔�(sh��)�a���Լ���Ƭ�C(j��)���r(sh��)����(sh��)�F(xi��n)һ��(g��)���Ŀ����{(di��o)���ĕr(sh��)犣�Ҫ�����£� 8λ��(sh��)�a���@ʾ���@ʾ��ʽ���� �r(sh��)-��-�� XX-XX-XX Ҫ��ϵ�y(t��ng)���Ă�(g��)���I�����ܷքe�� �{(di��o)�����ӣ��p���_�����ڰ����{(di��o)���I�r(sh��)���@ʾ�r(sh��)�ă�λ��(sh��)�a����1 Hz �l���W�q������ٴΰ����{(di��o)���I���t���_ʼ�W�q���r(sh��)�֏�(f��)�����@ʾ������ѭ�h(hu��n)��ֱ�����´_���I���֏�(f��)�������@ʾ���ڔ�(sh��)�a���W�q�ĕr(sh��)���¼ӻ��ߜp�I�����{(di��o)������(y��ng)���@ʾ��(n��i)�ݡ����I֧�ֶ̰������L�������̰��r(sh��)���ĵă�(n��i)��ÿ������һ���ߜpСһ���L���r(sh��)����һ�������B�m(x��)���ӻ��ߜp�١� �Y(ji��)���ܶ��ˣ��ܶ��ۺ���һ���Ӷ��������˼·���䌍(sh��)���}�ĸ�Դ���ڛ]���Թ��̻��ĽǶ�ȥ˼������ľ������ܶ����ڌW(xu��)��(x��)��(sh��)�a�ܾ��̵ĕr(sh��)�����������ϻ��߾W(w��ng)�ϵ����Ӂ��M(j��n)��ԇ�(y��n)���ⲻ֪���@Щ���Ӵ��a�H�Hֻ�Ǿ���һ��(g��)��ʾ�Ե����ã��õ���(sh��)�H���Ǻ��y�õġ��eһ��(g��)���ε����ӡ� �����@�γ������ھW(w��ng)���S���������ģ�
while(1)
{
for(num=0;num<9;num++)
{
P0=table[num];
P2=code[num] ;
delayms(2) ;
}
} ����ʲô���}���˛]�У�����]�п�����Ո�м�(x��)��һ�£����߀�]���������Ո���^�^ȥ���J(r��n)���ٿ�һ�顰�W(xu��)��(hu��)ጷ�CPU���@һ�µă�(n��i)�ݡ��@��(g��)����������ʾ�����Ǜ]��ʲô���}�ģ����nj�(sh��)�H��(y��ng)�õĕr(sh��)��(sh��)�a���@ʾ�ă�(n��i)�ݽ�(j��ng)��׃��������߀�кܶ������΄�(w��)��Ҫ��(zh��)�У�����@�ӵij����ڌ�(sh��)�H���Ǹ����͟o���õģ����Λr�����@��Ҳ�{(di��o)����delayms(2)�@��(g��)����(sh��)���ӕr(sh��)2 ms�@�������҂��ʹ�^ �� ���µă�(n��i)������̽ӑ��ν�Q���΄�(w��)�h(hu��n)����(����OS)�Ĕ�(sh��)�a�ܳ����O(sh��)Ӌ(j��)�ľ������}�����������е�˼�룬�oՓҪ���҂��@ʾ����ʽ��ô׃��(�电(sh��)�a���W�q����λ��),�҂������Ժܷ���Ľ�Q���}�� ��(sh��)�a�ܵ��@ʾ�֞��(d��ng)�B(t��i)�@ʾ���o�B(t��i)�@ʾ�ɷN���o�B(t��i)�@ʾ��ÿһλ��(sh��)�a�ܶ���һƬ��(d��)�����(q��)��(d��ng)оƬ�M(j��n)���(q��)��(d��ng)�����^��Ҋ����74LS164��74HC595�ȡ������@�оƬ�ĺ�̎���ǿ��Լ�(li��n)�����o��Ƭ�C(j��)�Ľӿ�ֻ��Ҫ�r(sh��)犾�����(sh��)��(j��)������˱��^��(ji��)ʡI/O�ڡ����D��ʾ�� ����74LS164��(li��n)�(q��)��(d��ng)8��(g��)�Ϊ�(d��)�Ĕ�(sh��)�a�� �o�B(t��i)�@ʾ�ă�(y��u)�c(di��n)�dz������Ρ����������漰�����(q��)��(d��ng)оƬ��(sh��)�����^�࣬ͬ�r(sh��)���]��PCB�IJ����ȵ����أ��ڵͳɱ�Ҫ����_�l(f��)�h(hu��n)���£��μ����o�B(t��i)�(q��)��(d��ng)�������m���@��(g��)�r(sh��)��Ϳ��Կ��]����(d��ng)�B(t��i)�(q��)��(d��ng)�ˡ���(d��ng)�B(t��i)�(q��)��(d��ng)�ĈD������ʾ(��EE21�_�l(f��)�����) ���ψD���Կ�����8��(g��)��(sh��)�a�ܵĶδa��һ��(g��)�Ϊ�(d��)��74HC573�(q��)��(d��ng)��ͬ�r(sh��)ÿһ��(g��)��(sh��)�a�ܵĹ������B��������һ��(g��)74HC573��ݔ���ϡ���(d��ng)�ͳ���һλ��(sh��)�a�ܵĶδa��(n��i)�ݕr(sh��)��ͬ�r(sh��)�xͨ��һλ��(sh��)�a�ܵ�λ�x���˕r(sh��)����һλ��(sh��)�a�ܾ��@ʾ������(y��ng)�ă�(n��i)���ˡ�һ�Εr(sh��)�g֮���ͳ��ڶ�λ��(sh��)�a�ܶδa�ă�(n��i)�ݣ��xͨ�ڶ�λ��(sh��)�a�ܵ�λ�x���@�r(sh��)�@ʾ�ă�(n��i)�ݾ�׃�ɵڶ�λ��(sh��)�a�ܵă�(n��i)���ˡ�������ѭ�h(hu��n)��ȥ���Ϳ��Կ��������Д�(sh��)�a��ͬ�r(sh��)�@ʾ�ˡ���(sh��)�ϣ�����r(sh��)�̣�ֻ��һλ��(sh��)�a���DZ��c(di��n)���ġ��������۵�ҕ�X����Ч��(y��ng)�Լ���(sh��)�a�ܵ����xЧ��(y��ng)����(d��ng)��(sh��)�a�ܒ�����l�ʷdz���ĕr(sh��)�������ѽ�(j��ng)�o���ֱ����(sh��)�a�ܵ�׃���ˣ�����������ͬ�r(sh��)�c(di��n)���ġ��҂����O(sh��)��(sh��)�a�ܵĒ����l�ʞ�50 Hz, �t���һ݆����ĕr(sh��)�g����1 / 50 = 20 ms ���҂���ϵ�y(t��ng)����8λ��(sh��)�a�ܣ��tÿһλ��(sh��)�a����һ݆�����������c(di��n)���ĕr(sh��)�g��20 / 8 = 2.5 ms ����(d��ng)�B(t��i)���茦�r(sh��)�gҪ����һ�c(di��n)�c(di��n)��(y��n)��t���͕�(hu��)�����@���W�q�� ���O(sh��)�҂����� �������΄�(w��)���£�
while(1)
{
LedDisplay() ; //��(sh��)�a�܄�(d��ng)�B(t��i)����
ADProcess() ; //AD�ɼ�̎��
TimerProcess() ; //�r(sh��)�g���P(gu��n)̎��
DataProcess() ; //��(sh��)��(j��)̎��
}
LedDisplay() �@��(g��)�΄�(w��)�Ĉ�(zh��)�Еr(sh��)�g����ͬ�҂�����Ӌ(j��)����ǘӣ�50 Hz�l�ʒ��裬�tԓ����(sh��)��(zh��)�еĕr(sh��)�g��20 ms �� ���O(sh��)ADProcess()�@��(g��)�΄�(w��)��(zh��)�еĵĕr(sh��)�g��2 ms ��TimerProcess()�@��(g��)����(sh��)��(zh��)�еĕr(sh��)�g�� 1 ms ��DataProcess() �@��(g��)����(sh��)��(zh��)�еĕr(sh��)�g��10 ms �� ��ô����(g��)������(sh��)��(zh��)��һ��Ŀ��r(sh��)�g�� 20 + 2 + 1 + 10 = 33 ms ����LedDisplay() �@��(g��)����(sh��)�Ē����l���ѽ�(j��ng)����50 Hz �ˣ����� 1 / 33 = 30.3 Hz ���@��(g��)�l�ʔ�(sh��)�a���ѽ�(j��ng)���Ը��X���W�q�ˣ���˲������҂���Ҫ��ʲô��(hu��)���F(xi��n)�@�N��r�أ� �҂�����Ӌ(j��)���50 Hz ��ϵ�y(t��ng)ֻ��LedDisplay()�@һ��(g��)�΄�(w��)�ĕr(sh��)��ó����ĽY(ji��)������(d��ng)ϵ�y(t��ng)�����������΄�(w��)��(d��ng)Ȼϵ�y(t��ng)ѭ�h(hu��n)��(zh��)��һ�εĿ��r(sh��)�g�������ˡ���ν�Q�@�N�F(xi��n)���ˣ�߀���x���_�҂��ڶ������v���ǂ�(g��)˼�롣 ϵ�y(t��ng)�a(ch��n)��һ��(g��)2.5 ms �ĕr(sh��)��(bi��o)��Ϣ��LedDisplay() , ÿ�ν��յ��@��(g��)��Ϣ�ĕr(sh��)��, ����һλ��(sh��)�a�ܡ��@��8��(g��)�r(sh��)��(bi��o)��Ϣ�^�����еĔ�(sh��)�a�ܾͶ�������һ���ˡ����������ѕ�(hu��)���@�ӵ��Ɇ���ADProcess() �Լ� DataProcess() �Ⱥ���(sh��)��(zh��)�еĕr(sh��)�g߀����Ҫʮ��ms �������@ʮ��ms �ĕr(sh��)�g��ѽ�(j��ng)�a(ch��n)���Îׂ�(g��)2.5 ms�ĕr(sh��)��(bi��o)��Ϣ�ˣ��@���M����©���˒��裬�@ʾ����߀�Ǖ�(hu��)�W�q���܉��뵽�@һ�c(di��n)���ܲ��e(cu��)���@Ҳ���Ǟ�ʲô�҂�Ҫ�W(xu��)��(hu��)ጷ�CPU��ԭ����ADProcess()��TimerProcess()��DataProcess()�����΄�(w��)�҂����fҪ��ȡ�˷�����CPU�M(j��n)��ጷţ�ʹ���(zh��)�еĕr(sh��)�g�M���ܶ̕����P(gu��n)����������@һ�c(di��n)�����Ժ���v������O(sh��)Ӌ(j��)���΄�(w��)�����O(sh��)Ӌ(j��)�ĕr(sh��)���(hu��)�v��� �����҂����ڴ�˼·�_ʼ�������w�ij��� ���Ⱦ���Timer.c�ļ���ԓ�ļ�����Ҫ��ϵ�y(t��ng)�ṩ�r(sh��)�g���P(gu��n)�ķ���(w��)����Ҫ���^�ļ������� #include <reg52.h> #include "MacroAndConst.h" ���˷���Ӌ(j��)�㣬�҂�?n��i)��?sh��)�a�ܒ���һλ�ĕr(sh��)�g��2 ms���O(sh��)�ö��r(sh��)��0��2 ms�Д�һ�Ρ�ͬ�r(sh��)��һ��(g��)λ׃��������2 ms�r(sh��)��(bi��o)��Ϣ�Ę�(bi��o)־�� bit g_bSystemTime2Ms = 0 ; // 2msLED��(d��ng)�B(t��i)����r(sh��)��(bi��o)��Ϣ
��ʼ�����r(sh��)��0
void Timer0Init(void)
{
TMOD &= 0xf0 ;
TMOD |= 0x01 ; //���r(sh��)��0������ʽ1
TH0 = 0xf8 ; //���r(sh��)����ʼֵ
TL0 = 0xcc ;
TR0 = 1 ;
ET0 = 1 ;
}
�ڶ��r(sh��)��0�Д�̎�������У��O(sh��)�Õr(sh��)��(bi��o)��Ϣ��
void Time0Isr(void) interrupt 1
{
TH0 = 0xf8 ; //���r(sh��)�������x��ֵ
TL0 = 0xcc ;
g_bSystemTime2Ms = 1 ; //2MS�r(sh��)��(bi��o)��(bi��o)־λ��λ
} Ȼ���҂��_ʼ������(sh��)�a�ܵĄ�(d��ng)�B(t��i)���躯��(sh��)�� �½�һ��(g��)CԴ�ļ�������������(y��ng)���^�ļ��� #include <reg52.h>
#include "MacroAndConst.h"
#include "Timer.h" ���_��һ��(g��)��(sh��)�a���@ʾ�ľ��_�^(q��)����(d��ng)�B(t��i)���躯��(sh��)ؓ(f��)؟(z��)���@��(g��)���_�^(q��)��ȡ����(sh��)��(j��)���������@ʾ������������(sh��)�t������ԓ���_�^(q��)���Ķ���׃�@ʾ�ă�(n��i)�ݡ�
uint8 g_u8LedDisplayBuffer[8] = {0} ; //�@ʾ���_�^(q��)
Ȼ���x��ꖔ�(sh��)�a�ܵĶδa���Լ�����(y��ng)��Ӳ���˿��B�ӡ�
code uint8 g_u8LedDisplayCode[]=
{
0xC0,0xF9,0xA4,0xB0,0x99,0x92,0x82,0xF8,
0x80,0x90,0x88,0x83,0xC6,0xA1,0x86,0x8E,
0xbf, //'-'̖(h��o)���a
} ;
sbit io_led_seg_cs = P1^4 ;
sbit io_led_bit_cs = P1^5 ;
#define LED_PORT P0
�ٷքe�����͔�(sh��)�a�ܶδa����(sh��)���Լ�λ�xͨ����(sh��)��
static void SendLedSegData(uint8 dat)
{
LED_PORT = dat ;
io_led_seg_cs = 1 ; //�_�δa�i��,�Ͷδa��(sh��)��(j��)
io_led_seg_cs = 0 ;
}
static void SendLedBitData(uint8 dat)
{
uint8 temp ;
temp = (0x01 << dat ) ; //����(j��)Ҫ�xͨ��λӋ(j��)���λ�a
LED_PORT = temp ;
io_led_bit_cs = 1 ; //�_λ�a�i��,��λ�a��(sh��)��(j��)
io_led_bit_cs = 0 ;
}
����ĺ��ľ�����ξ�����(d��ng)�B(t��i)���躯��(sh��)�ˡ�
������ʾ��
void LedDisplay(uint8 * pBuffer)
{
static uint8 s_LedDisPos = 0 ;
if(g_bSystemTime2Ms)
{
g_bSystemTime2Ms = 0 ;
SendLedBitData(8) ; //���[��ֻ��Ҫ�O(sh��)��λ�x����0~7����
if(pBuffer[s_LedDisPos] == '-') //�@ʾ'-'̖(h��o)
{
SendLedSegData(g_u8LedDisplayCode[16]) ;
}
else
{
SendLedSegData(g_u8LedDisplayCode[pBuffer[s_LedDisPos]]) ;
}
SendLedBitData(s_LedDisPos);
if(++s_LedDisPos > 7)
{
s_LedDisPos = 0 ;
}
}
}
����(sh��)��(n��i)�����xһ��(g��)�o�B(t��i)��׃��s_LedDisPos���Á���ʾ���蔵(sh��)�a�ܵ�λ�á�ÿ��(d��ng)�҂���(zh��)��ԓ����(sh��)һ�εĕr(sh��)��s_LedDisPos��ֵ��(hu��)�Լ�1����ʾ�´Β�����һ��(g��)��(sh��)�a�ܡ�Ȼ���Д�g_bSystemTime2Ms�r(sh��)��(bi��o)��Ϣ�Ƿ��ˡ�������ˣ����_ʼ��(zh��)�����P(gu��n)���裬��t��ֱ����������(sh��)��SendLedBitData(8) ;�����������[����?y��n)��҂���ϵ�y(t��ng)�Ķ��x��λ�x�ǹ���P0�ڵġ����Ͷδa֮ǰ��������P(gu��n)��λ�x����t����?y��n)��ϴ�λ�x���xͨ�ģ����Ͷδa�ĕr(sh��)���(hu��)�������(y��ng)��(sh��)�a�ܵ��c(di��n)�����M���@��(g��)�r(sh��)�g�ܶ̕���������?y��n)��҂��Ĕ?sh��)�a���Dz�������ģ����Կ�����߀�Ǖ�(hu��)��Щ�������������@�NӰ푣����б�Ҫ���Ͷδa��(sh��)��(j��)֮ǰ�P(gu��n)��λ�x�� if(pBuffer[s_LedDisPos] == '-') //�@ʾ'-'̖(h��o)�@���Z���Ǟ����@ʾ��-����̖(h��o)�������ȥ�ģ���ҿ��Կ����ڶ��x��(sh��)�a�ܵĶδa���ĕr(sh��)���Ҷ����һ��(g��)�ֹ�(ji��)�Ĵ��a0xbf�� code uint8 g_u8LedDisplayCode[]=
{
0xC0,0xF9,0xA4,0xB0,0x99,0x92,0x82,0xF8,
0x80,0x90,0x88,0x83,0xC6,0xA1,0x86,0x8E,
0xbf, //'-'̖(h��o)���a
} ; ͨ�^SendLedSegData(g_u8LedDisplayCode[pBuffer[s_LedDisPos]]) ;�ͳ�����(y��ng)�Ķδa��(sh��)��(j��)��Ȼ��ͨ�^SendLedBitData(s_LedDisPos);���_����(y��ng)��λ�x���@�ӌ���(y��ng)�Ĕ�(sh��)�a�ܾͱ��c(di��n)���ˡ�
if(++s_LedDisPos > 7)
{
s_LedDisPos = 0 ;
} Ȼ��s_LedDisPos�Լ�1���Ա��´Έ�(zh��)�б�����(sh��)�r(sh��)��������һ��(g��)��(sh��)�a�ܡ���?y��n)��҂���ϵ�y(t��ng)����8��(g��)��(sh��)�a�ܣ����Ԯ�(d��ng)s_LedDisPos > 7��Ҫ�����M(j��n)����0 ����t���]���κ�һ��(g��)��(sh��)�a�ܱ��x�С��@Ҳ�Ǟ�ʲô�҂������á� SendLedBitData(8) ; //���[��ֻ��Ҫ�O(sh��)��λ�x����0~7����
����(sh��)�a���M(j��n)�����[������ԭ�� �����҂�����������(y��ng)��������(sh��)������(sh��)�F(xi��n)��(sh��)�a��������ƕr(sh��)犵�Ч�������@ʾ10-20-30 ����10�c(di��n)20��30�롣 Main.c
#include <reg52.h>
#include "MacroAndConst.h"
#include "Timer.h"
#include "Led7Seg.h"
sbit io_led = P1^6 ;
void main(void)
{
io_led = 0 ; //�l(f��)����O���c��(sh��)�a�ܹ���P0��,�@���ֹ���l(f��)����O�ܵ��i��ݔ��
Timer0Init() ;
g_u8LedDisplayBuffer[0] = 1 ;
g_u8LedDisplayBuffer[1] = 0 ;
g_u8LedDisplayBuffer[2] = '-' ;
g_u8LedDisplayBuffer[3] = 2 ;
g_u8LedDisplayBuffer[4] = 0 ;
g_u8LedDisplayBuffer[5] = '-' ;
g_u8LedDisplayBuffer[6] = 3 ;
g_u8LedDisplayBuffer[7] = 0 ;
EA = 1 ;
while(1)
{
LedDisplay(g_u8LedDisplayBuffer) ;
}
} ������(g��)�����M(j��n)�о��g������Ч����� ��(d��ng)��������Ȼ�҂���Ҫģ�Mһ��(g��)�r(sh��)犣���ô�r(sh��)犿϶���Ҫ�߄�(d��ng)�ģ���Ȼ߀�Q��ʲô�r(sh��)����������҂���ǰ��Ļ��A(ch��)֮�ϣ�����һ�c(di��n)����(y��ng)�Ĵ��a���҂��@��(g��)�r(sh��)��߄�(d��ng)������ �҂�֪����֮ǰ�҂��Լ��O(sh��)����һ��(g��)���蔵(sh��)�a���õ���2 ms�r(sh��)��(bi��o)�� ����҂��ٌ��@��(g��)�r(sh��)��(bi��o)�M(j��n)��Ӌ(j��)��(sh��)����(d��ng)Ӌ(j��)��(sh��)ֵ�_(d��)��500����500 * 2 = 1000 ms �r(sh��)����ʾ�ѽ�(j��ng)��ȥ��1 S�ĕr(sh��)�g���҂��ٸ���(j��)�@��(g��)1 S�ĕr(sh��)�g�����@ʾ���_�^(q��)���ɡ� �����ܺ��Σ��҂���(sh��)�F(xi��n)���ɡ� ������Timer.c�������ɂ�(g��)׃����
bit g_bTime1S = 0 ; //�r(sh��)�1S�r(sh��)��(bi��o)��Ϣ
static uint16 s_u16ClockTickCount = 0 ; //��2 ms �r(sh��)��(bi��o)�M(j��n)��Ӌ(j��)��(sh��)
���ڶ��r(sh��)���Дຯ��(sh��)���������´��a��
if(++s_u16ClockTickCount == 500)
{
s_u16ClockTickCount = 0 ;
g_bTime1S = 1 ;
} ��������Կ�����s_u16ClockTickCountӋ(j��)��(sh��)ֵ�_(d��)��500�ĕr(sh��)��g_bTime1S�r(sh��)��(bi��o)��Ϣ�a(ch��n)����Ȼ���҂�����(j��)�@��(g��)�r(sh��)��(bi��o)��Ϣˢ��(sh��)�a���@ʾ���_�^(q��)�� void RunClock(void)
{
if(g_bTime1S )
{
g_bTime1S = 0 ;
if(++g_u8LedDisplayBuffer[7] == 10)
{
g_u8LedDisplayBuffer[7] = 0 ;
if(++g_u8LedDisplayBuffer[6] == 6)
{
g_u8LedDisplayBuffer[6] = 0 ;
if(++g_u8LedDisplayBuffer[4] == 10)
{
g_u8LedDisplayBuffer[4] = 0 ;
if(++g_u8LedDisplayBuffer[3] == 6)
{
g_u8LedDisplayBuffer[3] = 0 ;
if( g_u8LedDisplayBuffer[0]<2)
{
if(++g_u8LedDisplayBuffer[1]==10)
{
g_u8LedDisplayBuffer[1] = 0 ;
g_u8LedDisplayBuffer[0]++;
}
}
else
{
if(++g_u8LedDisplayBuffer[1]==4)
{
g_u8LedDisplayBuffer[1] = 0 ;
g_u8LedDisplayBuffer[0] = 0 ;
}
}
}
}
}
}
}
} �@��(g��)����(sh��)�����þ��nj�ÿ��(g��)��(sh��)�a�ܾ��_λ��ֵ�M(j��n)���Д࣬�Д�Ę�(bi��o)��(zh��n)�����҂���֪��24С�r(sh��)�ơ�����Ă�(g��)λ����10 ����0��ͬ�r(sh��)���ʮλ��1��.�T�����ҾͲ�һһԔ���ˡ�ͬ�r(sh��)���҂��پ���һ��(g��)�r(sh��)犳�ʼֵ�O(sh��)�ú���(sh��)���@�ӣ����Ժܷ�������������_ʼ�ĕr(sh��)���ĕr(sh��)犳�ʼֵ�� void SetClock(uint8 nHour, uint8 nMinute, uint8 nSecond)
{
g_u8LedDisplayBuffer[0] = nHour / 10 ;
g_u8LedDisplayBuffer[1] = nHour % 10 ;
g_u8LedDisplayBuffer[2] = '-' ;
g_u8LedDisplayBuffer[3] = nMinute / 10 ;
g_u8LedDisplayBuffer[4] = nMinute % 10 ;
g_u8LedDisplayBuffer[5] = '-' ;
g_u8LedDisplayBuffer[6] = nSecond / 10 ;
g_u8LedDisplayBuffer[7] = nSecond % 10 ;
} Ȼ�������҂���������(sh��)���£�
void main(void)
{
io_led = 0 ; //�l(f��)����O���c��(sh��)�a�ܹ���P0��,�@���ֹ���l(f��)����O�ܵ��i��ݔ��
Timer0Init() ;
SetClock(10,20,30) ; //�O(sh��)�ó�ʼ�r(sh��)�g��10�c(di��n)20��30��
EA = 1 ;
while(1)
{
LedDisplay(g_u8LedDisplayBuffer) ;
RunClock();
}
} ���g��֮�����d���҂��Č�(sh��)�(y��n)���ϣ���ô�ӣ�һ��(g��)���εĕr(sh��)犾��@���Q���ˡ� ���ˣ��������V��һ�����ˡ����������ɔ�(sh��)�a�ܵ��W�q�@ʾ���������_�^���f���ǂ�(g��)��(sh��)�a�ܕr(sh��)犵Ĺ��ܣ�������һ��(g��)˼���Ć��}���o���˼���ɡ� ͬ�r(sh��)����(g��)LEDƪ�͵��˽Y(ji��)���ˣ����Ժ�������У��҂����_ʼ�W(xu��)��(x��)��ξ�����(sh��)�õİ��I�������
������----�u���u���ğ� �����W(xu��)��(x��)���ϵ�LED�����҂�����Ը�_ʼ�W�q�������������Ƿ���d�ˣ����������(hu��)�ġ����Ǻܿ���͕�(hu��)���X��̫���{(di��o)������ͬһ��(g��)�l�����W�q������ͬһ��(g��)�������W�q�����Ҫ���܉��ɰ���u׃����Ȼ��������׃��ԓ��Ư�������ţ��뷨���e(cu��)������ԓ��ʲô�ط������ء� ���_ʼ�҂��Ĺ���֮ǰ�����ȁ��˽�һ��(g��)���PWM�� PWM(Pulse Width Modulation)���}�_�����{(di��o)�Ƶ�Ӣ�Ć��~�Ŀs���������@��Ԓ��ͨ�Űٿ��Ќ���Ķ��x�� �}�_�����{(di��o)��(PWM)������̎�����Ĕ�(sh��)��ݔ���팦ģ�M�·�M(j��n)�п��Ƶ�һ�N�dz���Ч�ļ��g(sh��)���V����(y��ng)���ڏĜy����ͨ�ŵ����ʿ����c׃�Q���S���I(l��ng)���С��}���{(di��o)�����_�P(gu��n)�ͷ�(w��n)���Դ�е��g(sh��)�Z���@�ǰ���(w��n)���Ŀ��Ʒ�ʽ��ģ�����PWM�ͣ�߀��PFM�ͺ�PWM��PFM����͡��}���{(di��o)��ʽ�_�P(gu��n)�ͷ�(w��n)���·���ڿ����·ݔ���l�ʲ�׃����r�£�ͨ�^늉������{(di��o)����ռ�ձȣ��Ķ��_(d��)����(w��n)��ݔ��늉���Ŀ�ġ� �x�������c(di��n)�ޝ��y�����䌍(sh��)���ε��f����PWM���g(sh��)����ͨ�^�{(di��o)��һ��(g��)���ڹ̶��ķ�����ռ�ձȣ����{(di��o)��(ji��)ݔ��늉���ƽ����(d��ng)늉���������߹��ʵȱ��������҂�������һ��(g��)ˮ���^��ȣ���1S�r(sh��)�g�ֳ�50�ȷݣ���ÿһ��(g��)�ȷ�20MS�����@20MS�r(sh��)�g������҂���ˮ���^ˮ�yһֱ���_����ô���@20MS�����^��ˮ�϶������ģ�����҂���ˮ�y���_15MS��ʣ�µ�5MS�P(gu��n)�]ˮ�y����ô������ˮ��Ȅ���20MSȫ�_�϶�ҪС�Ķࡣͬ�ӵĵ������҂�����ͨ�^����20MS�r(sh��)�g��ˮ�y�_���ĕr(sh��)�g���L�́��������^��ˮ�Ķ��١���ô��1S��(n��i)ƽ��������ˮ����Ҳ�Ϳ��Ա������ˡ� ��(d��ng)�҂��{(di��o)��PWM��ռ�ձȕr(sh��)���͕�(hu��)����늉���������ĸ�׃��LED��������B(t��i)�͕�(hu��)�S֮�l(f��)������(y��ng)��׃���� �����������ͨ�^�@�N�����팍(sh��)�F(xi��n)�҂���Ҫ�ĝu���u����Ч�����҂���ԇһ�°ɡ� ��Ҷ�֪��������һ��(g��)�R���l�ʣ���(d��ng)LED���W�q�l���_(d��)��һ���ĕr(sh��)�����۾ͷֱ治��LED�Ƿ����W�q�ˡ������҂�ƽ�����ҕһ�ӣ��������������B�m(x��)�ģ���(sh��)�|(zh��)�����@��(g��)���ӣ������B�m(x��)��(d��ng)������һ�����oֹ�Į�����1S�ĕr(sh��)�g����ٲ��ų�����Ʃ��ÿ��24�����ٶȲ��ţ��������۵�ҕ�X����Ч��(y��ng)����������������B�m(x��)���ˡ�ͬ�ӵĵ����������҂���LED��׃�����^���У��҂����X���������W�q�����Ԍ����W�q���l�ʶ���50Hz���ϡ�ͬ�r(sh��)���˿����������^�ɵ�Ч���������@���҂����@�ﶨ�x��׃��������0~99��100�ȷ֣�.�������ĕr(sh��)����Ҷȵȼ���99����0�ĕr(sh��)�����Ҳ����Ϩ���ˡ� ���Ǻ��҂����xPWM��ռ�ձ����ޞ�99, �����x��0
#define LED_PWM_LIMIT_MAX 99
#define LED_PWM_LIMIT_MIN 0
�ٶ��҂�LED���W�q�l�ʞ�50HZ��������׃���ķ�����0~99��100�ȷ֡��tÿһ�ȷ���ռ�õĕr(sh��)�g�� 1/(50*100) = 200us ���҂��ڸ�׃LED�������B(t��i)�r(sh��)����(y��ng)ԓ����200us����(sh��)���r(sh��)�̕r(sh��)�����@���҂��Æ�Ƭ�C(j��)�Ķ��r(sh��)���a(ch��n)��200us���Д࣬ͬ�r(sh��)ÿ20MS�{(di��o)��һ��LED��ռ�ձȡ��@����20MS * 100 = 2S�ĕr(sh��)�g��(n��i)LED���ԏİ���u׃��������һ��(g��)2S��(n��i)���ԏ�����u׃����Ȼ��ѭ�h(hu��n)�� ���ڴֵă�(n��i)�ݶ��������Д�����ɣ���ˣ��҂��Ĵִ��a����Timer.c�@��(g��)�ļ��о�����������(sh��)�г��˳�ʼ��֮�⣬����һ��(g��)�յ���ѭ�h(hu��n)��
Timer.c��(n��i)�����¡�
#include <reg52.h>
#include "MacroAndConst.h"
#define LED P0 //���xLED�ӿ�
#define LED_ON() LED = 0x00 ; //����LED��
#define LED_OFF() LED = 0xff ; //����LEDϨ��
#define LED_PWM_LIMIT_MAX 99
#define LED_PWM_LIMIT_MIN 0
static uint8 s_u8TimeCounter = 0 ; //�Д�Ӌ(j��)��(sh��)
static uint8 s_u8LedDirection = 0 ; //LED������� 0 ���u�� 1 ���u��
static int8 s_s8LedPWMCounter = 0 ; //LEDռ�ձ�
void Timer0Init(void)
{
TMOD &= 0xf0 ;
TMOD |= 0x01 ; //���r(sh��)��0������ʽ1
TH0 = 0xff ; //���r(sh��)����ʼֵ(200us�Д�һ��)
TL0 = 0x47 ;
TR0 = 1 ;
ET0 = 1 ;
}
void Time0Isr(void) interrupt 1
{
static int8 s_s8PWMCounter = 0 ;
TH0 = 0xff ; //���r(sh��)�������x��ֵ
TL0 = 0x47 ;
if(++s_u8TimeCounter >= 100) //ÿ20MS�{(di��o)��һ��LED��ռ�ձ�
{
s_u8TimeCounter = 0 ;
//����ǝu������׃��,�tռ�ձ��f��
if((s_s8LedPWMCounter <= LED_PWM_LIMIT_MAX) &&(0 == s_u8LedDirection))
{
s_s8LedPWMCounter++ ;
if(s_s8LedPWMCounter > LED_PWM_LIMIT_MAX)
{
s_u8LedDirection = 1 ;
s_s8LedPWMCounter = LED_PWM_LIMIT_MAX ;
}
}
//����ǝu������׃��,�tռ�ձ��f�u
if((s_s8LedPWMCounter >= LED_PWM_LIMIT_MIN) &&(1 == s_u8LedDirection))
{
s_s8LedPWMCounter-- ;
if(s_s8LedPWMCounter < LED_PWM_LIMIT_MIN)
{
s_u8LedDirection = 0 ;
s_s8LedPWMCounter = LED_PWM_LIMIT_MIN ;
}
}
s_s8PWMCounter = s_s8LedPWMCounter ; //�@ȡLED��ռ�ձ�
}
if(s_s8PWMCounter > 0) //ռ�ձȴ���0,�t�c(di��n)��LED,��tϨ��LED
{
LED_ON() ;
s_s8PWMCounter-- ;
}
else
{
LED_OFF();
}
}
�䌍(sh��)PWM���g(sh��)���҂���(sh��)�H�����Б�(y��ng)�õķdz��ࡣ���^���͵đ�(y��ng)�þ��ǿ���늙C(j��)���D(zhu��n)�٣����Ƴ������Ĵ�С���ȵȡ����S�����g(sh��)�İl(f��)չ��Ҳ���F(xi��n)��������͵�PWM���g(sh��)������늉�PWM����늉�PWM��SPWM�ȵȣ�������dȤ���Ե��W(w��ng)��ȥ�@ȡ����(y��ng)�Y�όW(xu��)��(x��)���P(gu��n)�ڝu���u���ğ��ͺ��ε��v���@�
������ һ��(g��)���P(gu��n)0.0625����\(y��n)���뵽�Ć��}
����һ�炃̖(h��o)�QͦNB��Ƕ��ܛ�����̎����������Ĵ��a��͚W������������һ��(g��)ֻ��4K���a�Ć�Ƭ�C(j��)��2��(g��)DS18B20�y����������֪��DS18B20ݔ����(sh��)��(j��)ֻҪ����0.0625���ǜy���Ĝض�ֵ���@�炃�f������g��ôҲ����(sh��)�H�ϳ���ֻ�к��εIJɼ��ɂ�(g��)DS18B20�Ĕ�(sh��)��(j��)�D(zhu��n)�Q�ɜض�ֵ��֮����1602Һ�����@ʾ��ͦ����(g��)������ôҲ�벻ͨ��ʲô������g����ֻ�x��һ�´��a�l(f��)�F(xi��n)����͛]��(d��ng)�X�ӣ�����ø��c(di��n)���DS18B20��(sh��)��(j��)ֱ�ӳ���0.0625�ˣ��dz����Ź��أ�����(d��ng)��(d��ng)�X��Ҳ��(hu��)֪��0.0625������1/16�ᣬ��DS18B20�Ĕ�(sh��)��(j��)ֱ������4λ�������ˣ���(d��ng)ȻҪע���̖(h��o)�����@���Ƴ����ʮ�ֺ���߀ʡ���g�����}�ܺý�Q�����g��ȻҲ�͉��ˡ� �F(xi��n)�����Ƕ��̎�����_��(sh��)���M(j��n)���ˣ�������g��Խ��Խ��(sh��)��(j��)RAM���gҲԽ��Խ��(d��o)�ºܶ����ڌ�����ĕr(sh��)�������ʲô���������C�Z�Ե��`�������ǿv�M�Y�G������Ҳ���v��(g��)����Ч�ʺͿɿ��ԡ�����ǰЩ����Ҋ��һ������ARM cortex-m3̎�����o�˽ӻ��(g��)��y����1024�c(di��n)FFT�㷨������12λ��ADϵ�y(t��ng)���@С�һ�ֱ�ӵ��W(w��ng)�����d�˸��c(di��n)��FFT�㷨���a�ͽo�˼����ˣ��Y(ji��)������(g��)�������������ģ��˼��Ñ��ɲ��I�ΰ����@�r(sh��)Ҫ?ji��ng)ӄ?d��ng)�X�Ӱє�(sh��)��(j��)ֱ��׃�ɳ���ij��(g��)��(sh��)׃������(sh��)���ö��c(di��n)FFT̎����֮���ٰє�(sh��)��(j��)��һ�²������ˡ��ٶ���ȻҲ���ˣ�����Ҳ��ʡ�¿��g����(sh��)�H��(d��ng)���҂���Ƕ��ܛ���ܶ��r(sh��)�ж���ҕ�����(zh��)��Ч�ʆ��}���Ƕ��܌�(sh��)�F(xi��n)���ܣ����Еr(sh��)����Ǜ]��Մ���ܡ���?gu��)״������@�ӵĹ��̎���ֱ�Ӱт���������̖(h��o)�Ŵ���M(j��n)Ƕ��̎������AD��Ҳ������AD��(sh��)��(j��)�Ƿ�(w��n)����Ч��ֱ�Ӿ��M(j��n)��FFT�\(y��n)�㣬��FFT�Y(ji��)�����ǟ��[�����y������B�܇�(y��n)�أ������֙C(j��)е����FFT���A(ch��)����ȥ�����㷨��ϵ�y(t��ng)����Խ��Խ���ٶ�Խ��Խ������(sh��)�H��Ҳ�ܺ��ε��£��ڂ������Ŵ���̖(h��o)�M(j��n)AD֮ǰ��һ������B�V������Ҳ�ͽ�Q�ˣ��������^Ƕ��ܛ�����ֵĸ����dz�������f�ܣ���(sh��)�ڽ�Q���˾͓Q�������g�����ٵ�̎����������(g��)����ѭ�h(hu��n)�� ��(j��ng)�� �f�F(xi��n)�����е�̼�壬�����ɫ��Ƕ��ܛ�����̎������׳ɞ��̼һ�壬ֻҪ���a��Ч��̎�����l����Ȼ�����`�������Ȼ���Ҳ�����ˣ�������̼�ŷ�Ҳ�����ˡ�����Ŀǰ��̎����Ƕ��̎���������a�l��(sh��)����Ҳ�e��Ч����
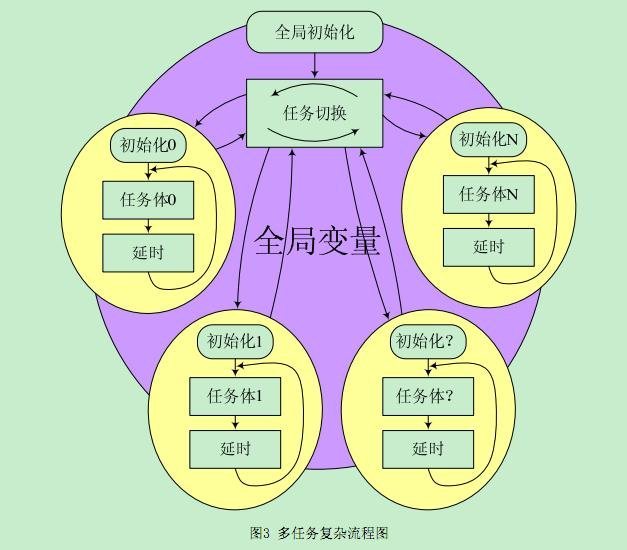
�ڰ��� ����O(sh��)Ӌ(j��)��(f��)�s�Ķ��΄�(w��)���� �҂������T�A�Σ�һ���挦���O(sh��)Ӌ(j��)���dž�һ�ĺ��ε��΄�(w��)�����̈D������D 1 ��ʾ��ͨ����(hu��)��̤��ѭ�h(hu��n)�ӕr(sh��)��M���΄�(w��)��Ҫ���挦���΄�(w��)������(f��)�s�ij����O(sh��)Ӌ(j��)�����ÈD 1 ��˼�룬�҂���(hu��)������D 2 ��ʾ�ij����ڴ�ѭ�h(hu��n)�w�в��������΄�(w��)��ͨ��߀Ҫ���ӕr(sh��)��M���ض��΄�(w��)��(ji��)�ģ��@�N�����O(sh��)Ӌ(j��)˼���������@�IJ��㣬��Ҫ�Ǹ���(g��)�΄�(w��)֮�g�Ӱ푣������µ��κ�֮����ǰ�ܺõ��\(y��n)�е��΄�(w��)�п��ܲ����������电(sh��)�a�܄�(d��ng)�B(t��i)���裬�����@ʾЧ���ܺõ��(q��)��(d��ng)����(sh��)���������µ��΄�(w��)����F(xi��n)�W�q���@ʾЧ��׃���ˡ� 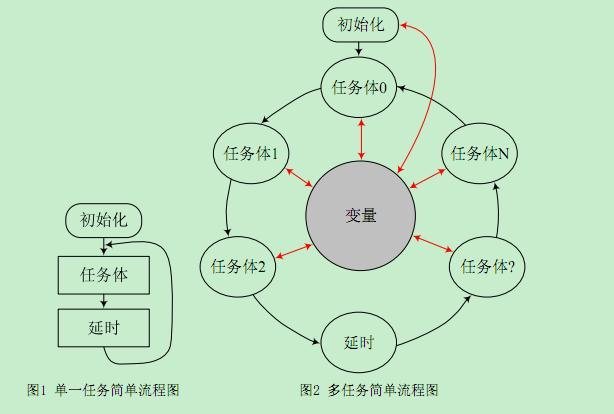 �����@�����W(xu��)�����O(sh��)Ӌ(j��)����r(sh��)����Ҫ�ij���(g��u)��˼�����¹��������˴�������ģ�K����(x��)֮����Ҫ���Y(ji��)�្�Լ��ij����O(sh��)Ӌ(j��)˼·������ܘ�(g��u)˼�룩�������҂������⡰�΄�(w��)�������^�΄�(w��)��������Ҫ CPU ���ڡ��P(gu��n)�ա����¼����^�����(sh��)�΄�(w��)����Ҫ CPU һֱ���P(gu��n)�ա� �����熢��(d��ng) ADC �Ć���(d��ng)�xȡ��������Щ�΄�(w��)�����¡�CPU һֱ���P(gu��n)�ա����� LCD ��ˢ�£���?y��n)?LCD ���@ʾ�o�˿��ģ�������Ҫ����ˢ�£��������@ʾ�ă�(n��i)���ڸ���׃����Ҳ����Ҫ����ˢ�£�������һ�ӵġ��@�ӿ�����CPU�������΄�(w��)һ�������M(f��i)����(sh��)Ҳ����ˣ��^�����(sh��)�����΄�(w��)��CPU�����ڡ����D(zhu��n)�� ��ѭ�h(hu��n)̤���ӕr(sh��)�� �����΄�(w��)���Y(ji��)߀����֪�����ܶ��΄�(w��)��Ҫ CPU ���ࡰ�P(gu��n)�ա� ���䌍(sh��)�@�N�����ࡱҲ���ИO�ģ����电(sh��)�a�܄�(d��ng)�B(t��i)���裬�܉�����40Hz �Ϳ����ˣ������I�P���裬�܉�����20Hz����(j��ng)�(y��n)ֵ����������Ҳ�Ͳ���(hu��)�G��Ч���I�Iֵ�ˣ�����LCDˢ�£����X������ 10Hz �Ϳ����ˣ��ȵȡ��������^�����(sh��)�΄�(w��)���ǹ����ڵ����l�ȡ����҂���CPUһ���\(y��n)���������ٶ��ֺܿ죬CPU�������ǿ��ܿ���ٶȈ�(zh��)�кܺ��ε�ָ�����Ώ�(f��)�s���΄�(w��)��߉���ġ�������k���ѡ��족�� CPU�ֳɶ���(g��)����CPU��Ȼ��o��ͬ���΄�(w��)���䲻ͬ�ٶȵ�CPU���@�N�O(sh��)���Dz��Ǻܺ��أ� �_��(sh��)�ܺã�����Ϳ���Ό����족��CPU���ֳɶ���(g��)�������� CPU������(j��)�@�N�뷨���҂���Ҫ��������CPU�YԴ�����P(gu��n)�ա���ͬ���΄�(w��)������܉����(j��)�΄�(w��)��������ռ��CPU�YԴ�����ȿ���D 3 ��ʾ�����̈D������(g��)�΄�(w��)���̪�(d��)�������΄�(w��)ͨ�^ȫ��׃����������Ϣ������������һ��(g��)��Ҫ��ģ�K���΄�(w��)�ГQ���������΄�(w��)�ГQģ�K��(sh��)�F(xi��n) CPU �������䣬�@��(g��)�΄�(w��)�ГQģ�K����ô��(sh��)�F(xi��n)���أ� ������Ҫ���⣬CPU һ���\(y��n)���������͟o��ֹͣ��Ӳ��֧�֕r(sh��)�ֹͣ�IJ����@��ӑՓ�����l�܉����һ��Ó�\���R�أ����ˣ����Д࣬�Д��܉�CPU�ص��ض���λ�ã��O(sh��)�룬�ܲ�����һ��(g��)���r(sh��)�Д࣬�����ԵČ� CPU�@ƥ�\(y��n)������Ó�\���R�ن��������½o�������ض����΄�(w��)����(sh��)�ϣ��΄�(w��)�ГQ�����@�ӌ�(sh��)�F(xi��n)�ġ� 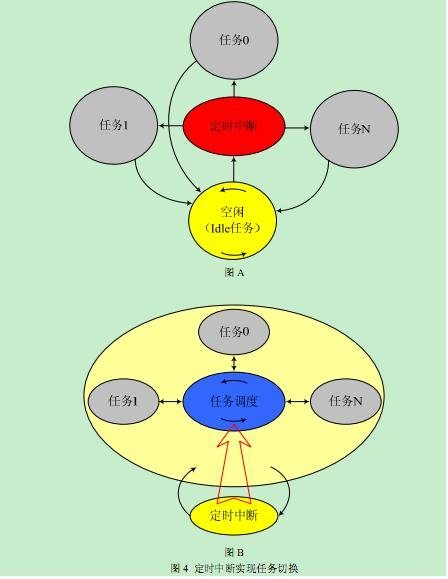 ��D 4A ��ʾ��CPU �ڿ��e�΄�(w��)ѭ�h(hu��n)�ȴ������r(sh��)�Д��� CPU �����Ԇ��أ�����(j��)�΄�(w��)�O(sh��)Ӌ(j��)�˲�ͬ��푑�(y��ng)�l�ȣ��M��l�����΄�(w��)���@��CPU�YԴ��CPU�鲻ͬ�΄�(w��)���P(gu��n)�ա���ɺ��ٴη��ؿ��e�΄�(w��)������ܶ���(f��)ʼ�����ڸ���(g��)�΄�(w��)���ԣ�������ԓ���һ��(g��)��(d��)����CPU�����Ԫ�(d��)���\(y��n)�С����@�N˼�똋(g��u)���ij����ܣ����ĺ�̎���΄�(w��)�����ײü���ϵ�y(t��ng)�܉����ú�(f��)�s���ڳ�ֿ��]��Ƭ�C(j��)�Д����ԣ��������Д�ͷ��ص������(sh��)�H���е��΄�(w��)�ГQ��D4B��ʾ�����r(sh��)�Д���ܰl(f��)�����΄�(w��)�{(di��o)�ȣ��S�C(j��)�΄�(w��)��(zh��)�е��κΕr(sh��)�D�����Ŀ����ʾ�������Д��ںΕr(sh��)�l(f��)����������(hu��)�������أ����r(sh��)�Д����a(ch��n)����Ӱ�ֻ���΄�(w��)�{(di��o)��ģ�K�����ã���������ͬ���΄�(w��)����ͬ�Ĺ�(ji��)�ľ;w���΄�(w��)�{(di��o)�ȕ�(hu��)��һ���ă�(y��u)�ȼ���(zh��)�о;w�΄�(w��)�����Y(ji��)��ͬ���΄�(w��)��ҪCPU�P(gu��n)�յ��l�ȣ��x�������ǂ�(g��)�l�ȁ��O(sh��)�����r(sh��)���Д�Ĺ�(ji��)�ģ�һ���x�� 200Hz������ 100Hz �����ԡ������ٽoÿ��(g��)�΄�(w��)�O(sh��)��һ��(g��)��(ji��)�Ŀ���Ӌ(j��)��(sh��)�� C��Ҳ���Ƕ��r(sh��)��ÿ�Д���ٴκ��(zh��)���΄�(w��)һ�Ρ�����ȡ���r(sh��)�Д(ji��)�Ğ� 200Hz���o�΄�(w��)�O(sh��)���� C=10���t�΄�(w��)��(zh��)���l�Ȟ� 200/10=20Hz������ǔ�(sh��)�a�ܒ��裬�� 40Hz ���W�qҎ(gu��)�ɣ��t�΄�(w��)��(ji��)�Ŀ���Ӌ(j��)��(sh��)�� C=5 ���ɡ��ڳ����O(sh��)Ӌ(j��)�У�C �������΄�(w��)�\(y��n)�еĹ�(ji��)�Ŀ��ƅ���(sh��)���҂���(x��)�T�� delay ����������ͬ���΄�(w��)��task0��task1������������ �����҂����ô��a��(sh��)�F(xi��n)���϶��΄�(w��)�����O(sh��)Ӌ(j��)˼�롣�������΄�(w��)�ГQ
while(1)
{
if(task_delay[0]==0) task0(); //task0�;w��
if(task_delay[1]==0) task1(); //task1�;w��
����
} ���@Ȼ����(zh��)���΄�(w��)�ėl�����΄�(w��)�ӕr(sh��)��task_delay=0����ô�΄�(w��)�ӕr(sh��)���l�������أ����r(sh��)���������r(sh��)���Д����΄�(w��)�ӕr(sh��)���pһֱ���w�㣬��(bi��o)־�΄�(w��)�;w����(d��ng)�]���΄�(w��)�;w�r(sh��)���΄�(w��)�ГQ��������һ��(g��)Idle �΄�(w��)��
void timer0(void) interrupt 1
{
if(task_delay[0]) task_delay[0]--;
if(task_delay[1]) task_delay[1]--;
����
} ���� timer0 ���Д(ji��)�Ğ� 200Hz��task0_delay ��ֵ�� 10���t task0()��(zh��)���l�Ȟ�200/10=20Hz���������ϻ��A(ch��)���҂����O(sh��)Ӌ(j��)һ��(g��)���ζ��΄�(w��)�����M(j��n)һ�����������@�N�����O(sh��)Ӌ(j��)˼�롣�΄�(w��)Ҫ���Æ�Ƭ�C(j��)��ͬ IO �_ݔ�� 1Hz��5Hz��10Hz��20Hz ������̖(h��o)���@��(g��)����̣ܶ���ֱ�ӽo����
#include "reg51.h"
#define TIME_PER_SEC 200 //���x�΄�(w��)�r(sh��)��l�ʣ�200Hz
#define CLOCK 22118400 //���x�r(sh��)犾���λHz
#define MAX_TASK 4 //���x�΄�(w��)��(sh��)��
extern void task0(void); //�΄�(w��)��
extern void task1(void);
extern void task2(void);
extern void task3(void);
sbit f1Hz = P1^0; //�˿ڶ��x
sbit f5Hz = P1^1;
sbit f10Hz = P1^2;
sbit f20Hz = P1^3;
unsigned char task_delay[4]; //�΄�(w��)�ӕr(sh��)׃�����x
//���r(sh��)��0��ʼ��
void timer0_init(void)
{
unsigned char i;
for(i=0;i<MAX_TASK;i++) task_delay[ i]=0; //�΄�(w��)�ӕr(sh��)������
TMOD = (TMOD & 0XF0) | 0X01; //���r(sh��)�� 0������ģʽ 1�� 16Bit���r(sh��)��ģʽ
TH0 = 255-CLOCK/TIME_PER_SEC/12/256;
TL0 = 255-CLOCK/TIME_PER_SEC/12%256;
TR0 =1;
ET0 =1; //�_�����r(sh��)������
}
// ϵ�y(t��ng) OS���r(sh��)�Д����(w��)
void timer0(void) interrupt 1
{
unsigned char i;
TH0 = 255-CLOCK/TIME_PER_SEC/12/256;
TL0 = 255-CLOCK/TIME_PER_SEC/12%256;
for(i=0;i<MAX_TASK;i++) if(task_delay[ i]) task_delay[ i]--;
//ÿ��(ji��)�Č��΄�(w��)�ӕr(sh��)׃���p1 ���p�� 0 ���΄�(w��)�;w��
}
/*main������(sh��)*/
void main(void)
{
timer0_init();
EA=1;//�_����
while(1)
{
if(task_delay[0]==0) {task0(); task_delay[0] = TIME_PER_SEC/ 2;}
//Ҫ�a(ch��n)�� 1hz ��̖(h��o)�����D(zhu��n)���ھ��� 2Hz������ͬ
if(task_delay[1]==0) {task1(); task_delay[1] = TIME_PER_SEC/10;}
//Ҫ�a(ch��n)�� 5hz ��̖(h��o)�����D(zhu��n)���ھ��� 10Hz������ͬ
if(task_delay[2]==0) {task2(); task_delay[2] = TIME_PER_SEC/20;}
if(task_delay[3]==0) {task3(); task_delay[3] = TIME_PER_SEC/40;}
}
}
void task0(void)
{
f1Hz = !f1Hz;
}
void task1(void)
{
f5Hz = !f5Hz;
}
void task2(void)
{
f10Hz = !f10Hz;
}
void task3(void)
{
f20Hz = !f20Hz;
}
����Ч����D5 ��ʾ�� 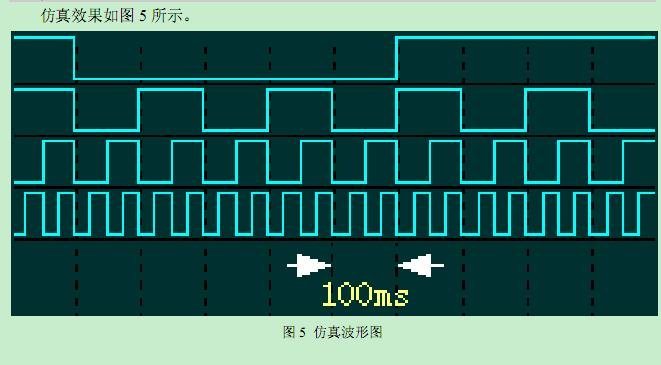 �D 5 ���沨�ΈD ͬ�ӵij���ͬ�W(xu��)�����Կ��]�ÈD 2 ��ʾ��˼���O(sh��)Ӌ(j��)���������ײ����ף������ij���?q��)��F(xi��n)����ͬ�Ĺ��ܣ�����Ҹ�׃Ҫ��׃��̖(h��o)���l�ʣ���ij��������Ć Ҫ�M(j��n)һ�������@�N�����O(sh��)Ӌ(j��)˼�룬�Ўׂ�(g��)���}߀��Ҫ���]�� ���΄�(w��)������ʲôҪ�� ��ͬ�΄�(w��)֮�g�Л]�Ѓ�(y��u)�ȼ�������ͬ�����鿂�Ђ�(g��)�p�ؾ����ɣ��� �΄�(w��)�g����ӕr(sh��)�� ���� ���˻ش��@Щ���}�������҂������� CPU���\(y��n)����r�� 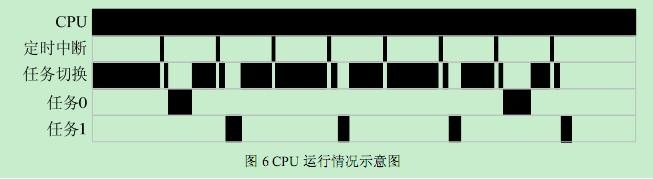
CPU�\(y��n)����r��D 6 ��ʾ����ɫ�^(q��)���ʾ CPU�M(j��n)�̣�ϵ�y(t��ng)����(d��ng)�� CPU���o��ֹ���\(y��n)�У�CPU�YԴ����η����أ����������M(j��n)�롰�΄�(w��)�ГQ���M(j��n)�̣������(d��ng)ǰ�]���΄�(w��)�;w�������΄�(w��)�ГQ�M(j��n)��ѭ�h(hu��n)��Ҳ�����������e�M(j��n)�̣������r(sh��)�Д��� CPU ��(d��ng)ǰ�M(j��n)�̴�࣬�ڶ��r(sh��)�Д��M(j��n)�̿���ijЩ�΄�(w��)�;w���Д���΄�(w��)�ГQ�M(j��n)�̣��ܿ��(hu��)�M(j��n)��;w�΄�(w��) 0��CPU���P(gu��n)�ա����΄�(w��) 0���ٴλص��΄�(w��)�ГQ�M(j��n)�̣����߀�������΄�(w��)�;w��߀��(hu��)�ٴ��M(j��n)�������΄�(w��)���]���΄�(w��)��ѭ�h(hu��n)�ȴ������r(sh��)�Д���(hu��)�����µ��΄�(w��)�;w��CPU Ҳ��(hu��)�����M(j��n)���΄�(w��)���P(gu��n)�ա� ���@�Ӳ�ͬ���΄�(w��)�͕�(hu��)�@�ò�ͬ��CPU�YԴ��ÿһ��(g��)�΄�(w��)�����Ǔ���һ��(g��)��(d��)����CPU ��֮����(w��)�����@�N�M(j��n)���ГQ�҂����Կ������ڶ��r(sh��)�Д���΄�(w��)�ГQ�^���У��~���ռ����һЩ CPU�YԴ�� �@���Ƕ��r(sh��)�Д��l�Ȳ���̫�죬 ��t�����CPU����Ч�YԴ�ʣ� ��(d��ng)Ȼ̫��Ҳ���С�������� CPUÿ���P(gu��n)���΄�(w��)�ĕr(sh��)�g����̫�L��������^һ��(g��)�Д����ڣ��͕�(hu��)Ӱ푵������΄�(w��)�Č�(sh��)�r(sh��)�ԡ����^�Č�(sh��)�r(sh��)�Ծ��ǰ����r(sh��)�Д��O(sh��)���Ĺ�(ji��)�ģ���(zh��n)�r(sh��)�õ�CPU�P(gu��n)�ա��@�ӣ�ÿһ��(g��)���΄�(w��)�ͱ�횺��Σ�ÿ�Ρ��P(gu��n)�ա��r(sh��)�g��ò�Ҫ���^���r(sh��)�Д(ji��)�����ڣ�5ms �� 10ms�����W(xu��)��Ҫ�� ms ��һ��(g��)����C(j��)�����ڞ� us ���Ć�Ƭ�C(j��)��1ms ���Ԉ�(zh��)����ǧ�lָ�������(sh��)�a�ܒ��裬�I�P���裬LCD�@ʾ�ȳ�Ҏ(gu��)�΄�(w��)���Ǿb�b����ģ�ֻ����������Ӌ(j��)�㣬��(sh��)��(j��)������@�ö��ˣ� �P(gu��n)���΄�(w��)��(y��u)�ȼ��Ć��}��һ��(g��)��(f��)�sϵ�y(t��ng)������(g��)�΄�(w��)֮�g���С��p�ؾ�����֮�^(q��)�e����Щ��Ҫ��(y��n)��(sh��)�r(sh��)���΄�(w��)ͨ�����Д���(sh��)�F(xi��n)���Д��܉��C��һ�r(sh��)�g����(y��ng)���҂��@��ӑՓ�IJ����ǷN��(sh��)�r(sh��)�����ָ��������S�r(sh��)���(n��i)�܉�õ� CPU���P(gu��n)�ա� �������I�P���裬���˱��C�^�õIJ���Ч�������/����/�L��/�̵ģ���ͬ�˰��I��һ�ӣ����܉����_�R(sh��)�e���@��Ҫ���C���Ē����ٶȣ��@�N�����ٶȌ���ͬ�İ��I��þ��ȣ�����҂��� 50Hz ���O(sh��)Ӌ(j��)����ô��Ҫ���C�I�P�����ٶ����κ���r�¶��܉����� 50Hz �����l�ȣ�����(hu��)��?y��n)�ij��(g��)���΄�(w��)���_�������Ɖģ�����_��(sh��)���µ��΄�(w��)�п����Ɖ��@��(g��) 50Hz �����l�ȣ��҂��͑�(y��ng)ԓ�ڃ�(y��u)�ȼ��������I�P���胞(y��u)�ȼ������ǂ�(g��)����Ӱ��I�P������΄�(w��)���@���w�F(xi��n)�ľ��Ǯ�(d��ng)ͬ�r(sh��)����(g��)�΄�(w��)�;w�r(sh��)�� ���Ȉ�(zh��)���Ă�(g��)�Ć��}���΄�(w��)�{(di��o)�ȕr(sh��)Ҫ��(y��u)�Ȉ�(zh��)�м��e�ߵ��΄�(w��)���P(gu��n)�ڡ��L���΄�(w��)�Ć��}����Щ�΄�(w��)�mȻ�ܪ�(d��)���������һ���΄�(w��)��(zh��)����Ҫ���L�r(sh��)�g������ DS18B20���ď�(f��)λ��ʼ�����x�ض�ֵ�����L�ӽ� 1s���@��Ҫ�� DS18B20 �ضȂ��������һ�Μض��D(zhu��n)�Q��Ҫ500 �� 750ms���@��(g��)�r(sh��)�g�� CPU ���ԣ���ֱ��̫�L�ˣ�����һ��������Ҫ�҂�?n��i)˵ȴ?10 ��һ�ӣ��@Ȼ�@�ӵ��΄�(w��)�������΄�(w��)�����R����ġ������ DS18B20 �@�ӵ����������� ADC Ҳ���@�ӣ� ����ô�O(sh��)Ӌ(j��)�΄�(w��)�w��Q���L���Ć��}���M(j��n)һ���о��@Щ�����l(f��)�F(xi��n)��������ҪCPU���P(gu��n)�ա������ĕr(sh��)�g�����L���P(gu��n)�I�ǵȴ��Y(ji��)��Ҫ���L�r(sh��)�g����Q���k�����ǰ���Ƶ������(q��)��(d��ng)�ֳɶ���(g��)�Σ���ʼ���Ρ�����(d��ng)�Ρ��x�Y(ji��)���Σ�������Ҫ���L�r(sh��)�g�ȴ��r(sh��)�g�Σ���Ҫ CPU�P(gu��n)�գ����S CPUȥ�P(gu��n)�������΄�(w��)�� ��һ��(g��)�΄�(w��)�ֳ����ɶΣ��_��ÿ����ҪCPU �P(gu��n)�Օr(sh��)�LС�ڶ��r(sh��)���Д(ji��)���L���@��CPU��̎���@Щ�L�΄�(w��)�r(sh��)���Ͳ���(hu��)Ӱ푵������΄�(w��)�Ĉ�(zh��)�С� ���ǻ������ϳ����O(sh��)Ӌ(j��)˼�룬���Y(ji��)���ƺ����һ�N���M(f��i)�YԴ�e�ٲ��Ҳ�ʹ�öї��Ķྀ�̲���ϵ�y(t��ng)���@��(g��)����ϵ�y(t��ng)�Լ�C�Z�Ԍ�(sh��)�F(xi��n)���oӲ����ه�ԣ���Ҫ��Ƭ�C(j��)���YԴ�O�١������� Easy51RTOS���e�m�ϳ��W(xu��)�ߌW(xu��)��(x��)ʹ�á����΄�(w��)��(y��u)�ȼ���ͨ�^���ɿ����΄�(w��)�g�ӕr(sh��)��ȱ�c(di��n)�Ǹ߃�(y��u)�ȼ��΄�(w��)�����Г�ռ���ܣ�һ��(g��)���Г�ռ���ܵIJ���ϵ�y(t��ng)��һ��Ҫ�漰���F(xi��n)�����o(h��)�c�֏�(f��)����Ҫ����� RAM �YԴ���漰���ї�֪�R(sh��)���ļ�ϵ�y(t��ng)����(f��)�s�����W(xu��)�ߌW(xu��)��(x��)�y�ȴ� ���˱��ڳ��W(xu��)�ߌW(xu��)��(x��)�������a�ļ����s�� 4 ��(g��)�ļ���
Easy51RTOS.Uv2 Keil�����ļ���KEIL�Ñ�����Ϥ��
main.c main����(sh��)���Ñ��΄�(w��) task ����(sh��)�ļ�
os_c.c Easy51RTOS���P(gu��n)����(sh��)�ļ�
os_cfg.h Easy51RTOS���P(gu��n)���Å���(sh��)�^�ļ�
�ļ����x���£�
����D��D8 ��ʾ
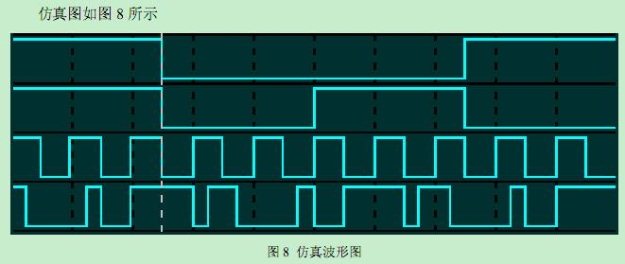 ���������(sh��)�F(xi��n)��(y��u)�ȼ��O(sh��)����
for(i=0;i<MAX_TASK;i++)
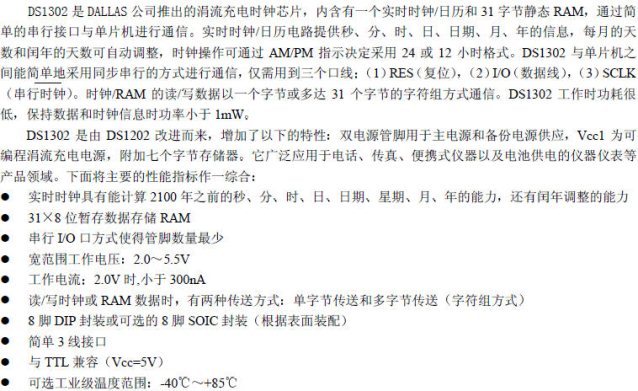
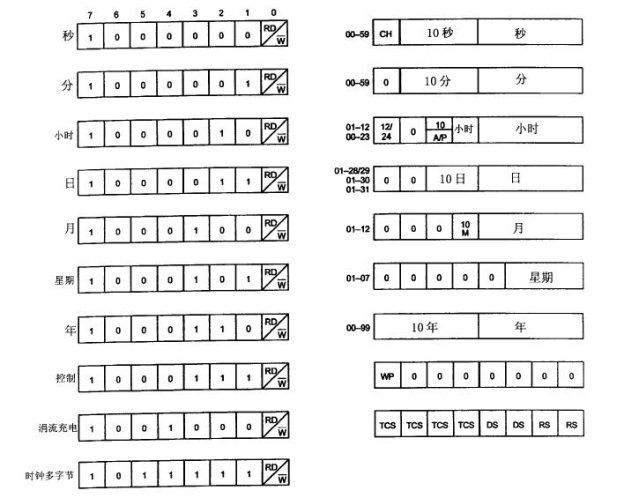
if (task_delay[ i]==0) {run(task[ i]); break;} //�;w�΄�(w��)�{(di��o)�� �@��� break ������ for ѭ�h(hu��n)��ʹ��ÿ�������΄�(w��)�{(di��o)�ȿ��Ǐ� task0 �_ʼ������ζ����(y��u)�ȼ��ߵ��΄�(w��)�;w��(hu��)�Ȉ�(zh��)�С��@��task0������߃�(y��u)�ȼ���task1��task2��task3��(y��u)�ȼ����ν��͡��e�� void task3(void)�� switch(state)��B(t��i)�C(j��)��(sh��)�F(xi��n)���΄�(w��)�ֶΣ��@Ҳ���΄�(w��)��(n��i)ϵ�y(t��ng)�ӕr(sh��)��һ�N������ �����Ұ��ۂ����õĂ�����DS1320 DS18B20�o��ҽ�B�¡� ���������ϵĴ����(sh��)51��Ƭ�C(j��)�_�l(f��)����f��ds1302��ds18b20��(y��ng)ԓ�DZ��^��Ҋ�ăɷN���оƬ��ds1302�Ǿ���SPI�����ӿڵĕr(sh��)�оƬ��ds18b20�t�Ǿ��Іο����ӿڵĔ�(sh��)�֜ضȂ������������҂��քe���J(r��n)�R(sh��)���W(xu��)��(hu��)��(y��ng)���@�ɷNоƬ�� �������f�ǿ�DS1302��datasheet�е����P(gu��n)��B�� ����������һЩ�����đ�(y��ng)�ý�B��
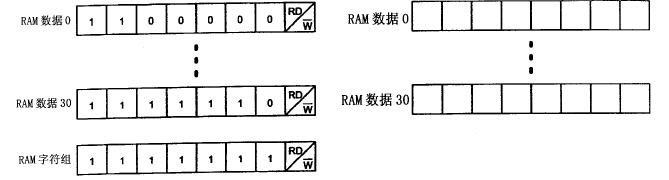
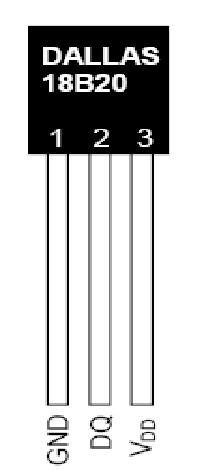
�������������_�������� ������DS1302�ĕr(sh��)犼Ĵ������҂�Ҫ�xȡ�ĕr(sh��)�g��(sh��)��(j��)���Ǐ������@Щ��(sh��)��(j��)�Ĵ������xȡ�����ġ���(d��ng)�҂�Ҫ���{(di��o)���r(sh��)�g�r(sh��)�����ѕr(sh��)�g��(sh��)��(j��)���뵽����(y��ng)�ļĴ����оͿ����ˡ� �@��DS1302��(n��i)����31��(g��)RAM�Ĵ�������ijЩ��(y��ng)�È����҂����ԑ�(y��ng)�õ������҂���Ҫ��һ��(g��)�����r(sh��)���ܵ��[犡��t�����[犵ĕr(sh��)�g���뵽31��(g��)RAM�Ĵ����е�����ׂ�(g��)����(d��ng)��Ƭ�C(j��)��늕r(sh��)��ֻҪ�҂���DS1302�Ă���늳�߀�ܹ�������ô���������е��[犔�(sh��)��(j��)�Ͳ���(hu��)�Gʧ~~ ���ڌ����@Щ�����IJ��������ϰ��Ք�(sh��)��(j��)�փ������ṩ�ĕr(sh��)��D�����P(gu��n)�����ց��M(j��n)�в����Ϳ����ˡ�������҂���(y��ng)���@Щ�����ĕr(sh��)��һ��Ҫ�������փ������Ҫ����M(j��n)�в���������X��߀������ĵ�Ԓ�����Ե��W(w��ng)�����dһЩ�����������փԿ��e�˵ij����e�˵�˼·����ô�ӵġ� DS1302�͆�Ƭ�C(j��)���B�Ӻܺ��Ρ�ֻ��һ����(f��)λ����һ���r(sh��)犾���һ����(sh��)��(j��)�����ɡ�ͬ�r(sh��)������߀��Ҫ��һ��(g��)32.768KHz�ľ�����ṩ�r(sh��)�Դ�����ھ���ăɶ˿��Էքe��һ��(g��)6PF���ҵ��������߾���ľ��_�ȡ�ͬ�r(sh��)�����ڵ�8�_����һ��(g��)3.6V�Ŀɳ�늵�늳ء���(d��ng)ϵ�y(t��ng)���������r(sh��)���Ԍ�늳��M(j��n)�������늡���(d��ng)ϵ�y(t��ng)��늕r(sh��)��DS1302���@��(g��)늳��ṩ�������^�m(x��)������ �����҂����(q��)��(d��ng)����
- sbit io_DS1302_RST = P2^0 ;
- sbit io_DS1302_IO = P2^1 ;
- sbit io_DS1302_SCLK = P2^2 ;
-
- //-------------------------------------����(sh��)��---------------------------------//
- #define DS1302_SECOND_WRITE 0x80 //���r(sh��)�оƬ�ļĴ���λ��
- #define DS1302_MINUTE_WRITE 0x82
- #define DS1302_HOUR_WRITE 0x84
- #define DS1302_WEEK_WRITE 0x8A
- #define DS1302_DAY_WRITE 0x86
- #define DS1302_MONTH_WRITE 0x88
- #define DS1302_YEAR_WRITE 0x8C
- #define DS1302_SECOND_READ 0x81 //�x�r(sh��)�оƬ�ļĴ���λ��
- #define DS1302_MINUTE_READ 0x83
- #define DS1302_HOUR_READ 0x85
- #define DS1302_WEEK_READ 0x8B
- #define DS1302_DAY_READ 0x87
- #define DS1302_MONTH_READ 0x89
- #define DS1302_YEAR_READ 0x8D
- //-----------------------------------������----------------------------------//
- #define DS1302_SCLK_HIGH io_DS1302_SCLK = 1 ;
- #define DS1302_SCLK_LOW io_DS1302_SCLK = 0 ;
-
- #define DS1302_IO_HIGH io_DS1302_IO = 1 ;
- #define DS1302_IO_LOW io_DS1302_IO = 0 ;
- #define DS1302_IO_READ io_DS1302_IO
- #define DS1302_RST_HIGH io_DS1302_RST = 1 ;
- #define DS1302_RST_LOW io_DS1302_RST = 0 ;
- /******************************************************
- * ����r(sh��)�g��(sh��)��(j��)�ĽY(ji��)��(g��u)�w *
- ******************************************************/
- struct
- {
- uint8 Second ;
- uint8 Minute ;
- uint8 Hour ;
- uint8 Day ;
- uint8 Week ;
- uint8 Month ;
- uint8 Year ;
- }CurrentTime ;
- /******************************************************************************
- * Function: static void v_DS1302Write_f( uint8 Content ) *
- * Description:��DS1302��һ��(g��)�ֹ�(ji��)�ă�(n��i)�� *
- * Parameter:uint8 Content : Ҫ�����ֹ�(ji��) *
- * *
- ******************************************************************************/
- static void v_DS1302Write_f( uint8 Content )
- {
- uint8 i ;
- for( i = 8 ; i > 0 ; i-- )
- {
- if( Content & 0x01 )
- {
- DS1302_IO_HIGH
- }
- else
- {
- DS1302_IO_LOW
- }
- Content >>= 1 ;
- DS1302_SCLK_HIGH
- DS1302_SCLK_LOW
- }
- }
- /******************************************************************************
- * Function: static uint8 v_DS1302Read_f( void ) *
- * Description: ��DS1302��(d��ng)ǰ�O(sh��)���ĵ�ַ�xȡһ��(g��)�ֹ�(ji��)�ă�(n��i)�� *
- * Parameter: *
- * Return: �����x������ֵ(uint8) *
- ******************************************************************************/
- static uint8 v_DS1302Read_f( void )
- {
- uint8 i, ReadValue ;
- DS1302_IO_HIGH
- for( i = 8 ; i > 0 ; i-- )
- {
- ReadValue >>= 1 ;
- if( DS1302_IO_READ )
- {
- ReadValue |= 0x80 ;
- }
- else
- {
- ReadValue &= 0x7f ;
- }
- DS1302_SCLK_HIGH
- DS1302_SCLK_LOW
-
- }
- return ReadValue ;
- }
- /******************************************************************************
- * Function: void v_DS1302WriteByte_f( uint8 Address, uint8 Content ) *
- * Description: ��DS1302ָ���ĵ�ַ����һ��(g��)�ֹ�(ji��)�ă�(n��i)�� *
- * Parameter: Address: Ҫ���딵(sh��)��(j��)�ĵ�ַ *
- * Content: ���딵(sh��)��(j��)�ľ��wֵ *
- * Return: *
- ******************************************************************************/
- void v_DS1302WriteByte_f( uint8 Address, uint8 Content )
- {
- DS1302_RST_LOW
- DS1302_SCLK_LOW
- DS1302_RST_HIGH
- v_DS1302Write_f( Address ) ;
- v_DS1302Write_f( Content ) ;
- DS1302_RST_LOW
- DS1302_SCLK_HIGH
- }
- /******************************************************************************
- * Function: uint8 v_DS1302ReadByte_f( uint8 Address ) *
- * Description:��DS1302ָ���ĵ�ַ�x��һ��(g��)�ֹ�(ji��)�ă�(n��i)�� *
- * Parameter:Address: Ҫ�x����(sh��)��(j��)�ĵ�ַ *
- * *
- * Return: ָ����ַ�x����ֵ(uint8) *
- ******************************************************************************/
- uint8 v_DS1302ReadByte_f( uint8 Address )
- {
- uint8 ReadValue ;
- DS1302_RST_LOW
- DS1302_SCLK_LOW
- DS1302_RST_HIGH
- v_DS1302Write_f( Address ) ;
- ReadValue = v_DS1302Read_f() ;
- DS1302_RST_LOW
- DS1302_SCLK_HIGH
- return ReadValue ;
- }
- /******************************************************************************
- * Function: void v_ClockInit_f( void ) *
- * Description:��ʼ������DS1302�r(sh��)犼Ĵ�����ֵ(��������ֻ���{(di��o)��һ�μ���) *
- * Parameter: *
- * *
- * Return: *
- ******************************************************************************/
- void v_ClockInit_f( void )
- {
- if( v_DS1302ReadByte_f( 0xc1) != 0xf0 )
- {
- v_DS1302WriteByte_f( 0x8e, 0x00 ) ; //���S������
- v_DS1302WriteByte_f( DS1302_YEAR_WRITE, 0x08 ) ; //��
- v_DS1302WriteByte_f( DS1302_WEEK_WRITE, 0x04 ) ; //����
- v_DS1302WriteByte_f( DS1302_MONTH_WRITE, 0x12 ) ; //��
- v_DS1302WriteByte_f( DS1302_DAY_WRITE, 0x11 ) ; //��
- v_DS1302WriteByte_f( DS1302_HOUR_WRITE, 0x13 ) ; //�r(sh��)
- v_DS1302WriteByte_f( DS1302_MINUTE_WRITE, 0x06 ) ; //���
- v_DS1302WriteByte_f( DS1302_SECOND_WRITE, 0x40 ) ; //��
- v_DS1302WriteByte_f( 0x90, 0xa5 ) ; //���
- v_DS1302WriteByte_f( 0xc0, 0xf0 ) ; //�Д��Ƿ��ʼ��һ�Θ�(bi��o)�R(sh��)����
- v_DS1302WriteByte_f( 0x8e, 0x80 ) ; //��ֹ������
- }
- }
- /******************************************************************************
- * Function: void v_ClockUpdata_f( void ) *
- * Description:�xȡ�r(sh��)�g��(sh��)��(j��),�������ڽY(ji��)��(g��u)�wCurrentTime�� *
- * Parameter: *
- * *
- * Return: *
- ******************************************************************************/
- void v_ClockUpdata_f( void )
- {
- CurrentTime.Second = v_DS1302ReadByte_f( DS1302_SECOND_READ ) ;
- CurrentTime.Minute = v_DS1302ReadByte_f( DS1302_MINUTE_READ ) ;
- CurrentTime.Hour = v_DS1302ReadByte_f( DS1302_HOUR_READ ) ;
- CurrentTime.Day = v_DS1302ReadByte_f( DS1302_DAY_READ ) ;
- CurrentTime.Month = v_DS1302ReadByte_f( DS1302_MONTH_READ ) ;
- CurrentTime.Week = v_DS1302ReadByte_f( DS1302_WEEK_READ ) ;
- CurrentTime.Year = v_DS1302ReadByte_f( DS1302_YEAR_READ ) ;
- }
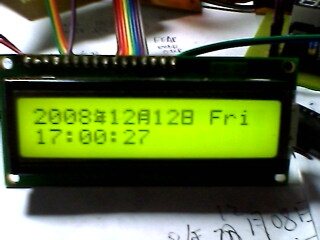
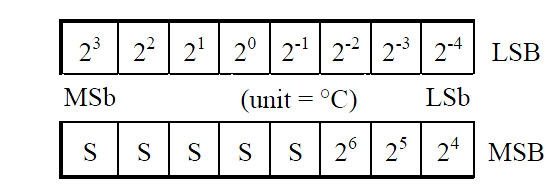
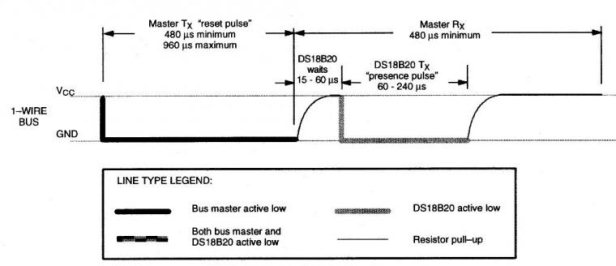
����������@Щ����(sh��)�҂��Ϳ��Ԍ�DS1302�M(j��n)�в����ˡ���(d��ng)�҂���Ҫ�@ȡ��(d��ng)ǰ�r(sh��)�g�r(sh��)��ֻ��Ҫ�{(di��o)��v_ClockUpdata_f( void )�@��(g��)����(sh��)���ɡ��xȡ���ĕr(sh��)�g��(sh��)��(j��)������CurrentTime�@��(g��)�Y(ji��)��(g��u)�w�С�������ΰѕr(sh��)�g��(sh��)��(j��)�ڔ�(sh��)�a�ܻ�����Һ�������@ʾ���������Ŵ�ґ�(y��ng)ԓ����(hu��)�˰�^_^. �����@ʾЧ�����~~ �������҂�����DS18B20�ɡ� DS18B20�džο����Ĕ�(sh��)�֜ضȂ����������c��Ƭ�C(j��)�Ľӿ�ֻ��Ҫһ����(sh��)��(j��)�����ɡ���(d��ng)Ȼ�B��������ζ��ܛ��̎���Ͽ���Ҫ�韩һ�c(di��n)��������������ă�(y��u)�c(di��n)�� 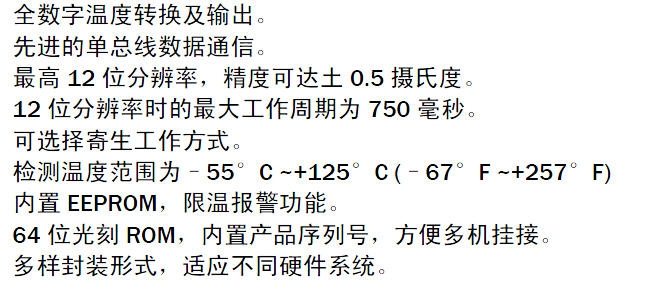 ���������n�ա����κ��҂����õ����O�ܛ]��ʲô�ɘ�Ŷ�� DS18B20�ă�(n��i)���惦(ch��)���֞����ײ��� ROM:���ԓ�����ľ��a��ǰ8λ��ξ�ϵ�еľ��a(DS18B20�ľ��a��19H)����48λ��оƬ��Ψһ����̖(h��o)���ڳ����ĕr(sh��)����ѽ�(j��ng)�O(sh��)�úã��Ñ��o�����ġ����8λ������56λ��CRC�a�� RAM��DS18B20�ă�(n��i)����������9��(g��)�ֹ�(ji��)�����е�һ��(g��)�͵ڶ���(g��)�ֹ�(ji��)����D(zhu��n)�Q��Ĝض�ֵ���ڶ���(g��)�͵�����(g��)�ֹ�(ji��)�քe��Ÿߜغ͵͜ظ澯ֵ��(������RAMָ��俽ؐ��EEPROM��)���Ă�(g��)�ֹ�(ji��)�����üĴ�������5~7��(g��)�ֹ�(ji��)��������9��(g��)�ֹ�(ji��)��ǰ8��(g��)�ֹ�(ji��)��CRC�a�� DS18B20�Ĝضȴ�����ψD��ʾ������Sλ��̖(h��o)λ����(d��ng)�ض�ֵ��ؓ(f��)ֵ�r(sh��)��S = 1 ����֮�tS = 0 ���҂��ѵõ��ĜضȔ�(sh��)��(j��)���ό���(y��ng)�ķֱ��ʼ����Եõ��D(zhu��n)�Q��Ĝض�ֵ�� DS18B20��ͨӍ�f(xi��)�h�� �ڌ�DS18B20�M(j��n)���x�����̕r(sh��)����횇�(y��n)���C�x���ĕr(sh��)��t���o���xȡ�y�ؽY(ji��)��������(j��)DS18B20��ͨӍ�f(xi��)�h�����C(j��)����DS18B20��ɜض��D(zhu��n)�Q��횽�(j��ng)�^3��(g��)���E:ÿһ���x��֮ǰ��Ҫ��DS18B20�M(j��n)�Џ�(f��)λ����(f��)λ�ɹ���l(f��)��һ�lROMָ����l(f��)��RAMָ��@�Ӳ��܌�DS18B20�M(j��n)���A(y��)���IJ�������(f��)λҪ�����C(j��)����(sh��)��(j��)������500us��Ȼ��ጷţ�DS18B20�յ���̖(h��o)��ȴ�16~160usȻ��l(f��)��60~240us�Ĵ��ڵ��}�_�����C(j��)�յ�����̖(h��o)��ʾ��(f��)λ�ɹ��� �ψD��DS18B20�ď�(f��)λ�r(sh��)��D�� �������x�����ĕr(sh��)��D 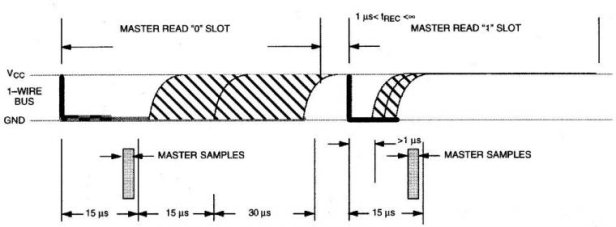 �@�nj������ĕr(sh��)��D 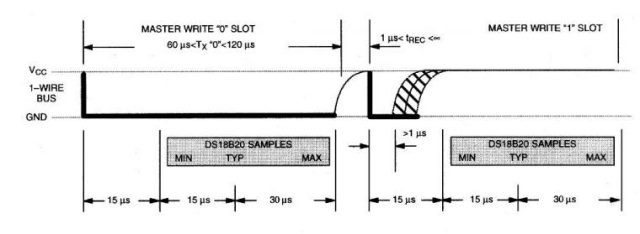 �����҂������������(q��)��(d��ng)������Ό��ɡ�
- sbit io_DS18B20_DQ = P2^3 ;
- #define DS18B20_DQ_HIGH io_DS18B20_DQ = 1 ;
- #define DS18B20_DQ_LOW io_DS18B20_DQ = 0 ;
- #define DS18B20_DQ_READ io_DS18B20_DQ
- /*******************************************************************
- * ����ض�ֵ�Ĕ�(sh��)�M.���δ����ؓ(f��)��(bi��o)־,�ض�ֵʮλ,��(g��)λ,��С��(sh��)λ *
- *******************************************************************/
- uint8 Temperature[ 4 ] ;
- void v_Delay10Us_f( uint16 Count )
- {
- while( --Count )
- {
- _nop_();
- }
- }
- /**************************************************************************
- * Function: uint8 v_Ds18b20Init_f( void ) *
- * Description: ��ʼ��DS18B20 *
- * Parameter: *
- * *
- * Return: ���س�ʼ���ĽY(ji��)��(0:��(f��)λ�ɹ� 1:��(f��)λʧ��) *
- **************************************************************************/
- uint8 v_Ds18b20Init_f( void )
- {
- uint8 Flag ;
- DS18B20_DQ_HIGH //�����ӕr(sh��)
- v_Delay10Us_f( 3 ) ;
- DS18B20_DQ_LOW //��������
- v_Delay10Us_f( 80 ) ; //�ӕr(sh��)����480us
- DS18B20_DQ_HIGH //����ጷ�
- v_Delay10Us_f( 15 ) ;
- Flag = DS18B20_DQ_READ ; //���Flag��0,�t��(f��)λ�ɹ�,��t��(f��)λʧ��
- return Flag ;
- }
- /******************************************************************************
- * Function: void v_Ds18b20Write_f( uint8 Cmd ) *
- * Description: ��DS18B20������ *
- * Parameter: Cmd: ��Ҫ�������� *
- * *
- * Return: *
- ******************************************************************************/
- void v_Ds18b20Write_f( uint8 Cmd )
- {
- uint8 i ;
- for( i = 8 ; i > 0 ; i-- )
- {
- DS18B20_DQ_LOW //���Ϳ���,�_ʼ���r(sh��)��
- DS18B20_DQ_READ = Cmd & 0x01 ; //�����ֵ����λ���͵�����
- v_Delay10Us_f( 5 ) ; //�����ӕr(sh��),DS18B20�xȡ�����ϵĔ�(sh��)��(j��)
- DS18B20_DQ_HIGH //���߿���,1bit�����ڽY(ji��)��
- Cmd >>= 1 ;
- }
- }
- /******************************************************************************
- * Function: uint8 v_Ds18b20Read_f( void ) *
- * Description: ��DS18B20�xȡһ��(g��)�ֹ�(ji��)�ă�(n��i)�� *
- * Parameter: *
- * *
- * Return: �xȡ���Ĕ�(sh��)��(j��) *
- ******************************************************************************/
- uint8 v_Ds18b20Read_f( void )
- {
- uint8 ReadValue, i ;
- for( i = 8 ; i > 0 ; i-- )
- {
- DS18B20_DQ_LOW
- ReadValue >>= 1 ;
- DS18B20_DQ_HIGH
- if( DS18B20_DQ_READ == 1 )
- ReadValue |= 0x80 ;
- v_Delay10Us_f( 3 ) ;
- }
- return ReadValue ;
- }
- /******************************************************************************
- * Function: uint16 v_Ds18b20ReadTemp_f( void ) *
- * Description: �xȡ��(d��ng)ǰ�ĜضȔ�(sh��)��(j��)(ֻ������һλС��(sh��)) *
- * Parameter: *
- * *
- * Return: �xȡ���Ĝض�ֵ *
- ******************************************************************************/
- uint16 v_Ds18b20ReadTemp_f( void )
- {
- uint8 TempH, TempL ;
- uint16 ReturnTemp ;
-
- /* if( v_Ds18b20Init_() ) return ; //��(f��)λʧ��,���@�������e(cu��)�`̎���Ĵ��a */
- v_Ds18b20Init_f() ; /��(f��)λDS18B20
- v_Ds18b20Write_f( 0xcc ) ; //���^ROM
- v_Ds18b20Write_f( 0x44 ) ; //����(d��ng)�ض��D(zhu��n)�Q
- v_Ds18b20Init_f() ;
- v_Ds18b20Write_f( 0xcc ) ; //���^ROM
- v_Ds18b20Write_f( 0xbe ) ; //�xȡDS18B20��(n��i)���ļĴ�����(n��i)��
- TempL = v_Ds18b20Read_f() ; //�x�ض�ֵ��λ����(n��i)��RAM�ĵ�0��(g��)�ֹ�(ji��)��
- TempH = v_Ds18b20Read_f() ; //�x�ض�ֵ��λ����(n��i)��RAM�ĵ�1��(g��)�ֹ�(ji��)��
- ReturnTemp = TempH ;
- ReturnTemp <<= 8 ;
- ReturnTemp |= TempL ; //�ض�ֵ����׃��ReturnTemp��
- return ReturnTemp ;
- }
- /******************************************************************************
- * Function: void v_TemperatureUpdate_f( void ) *
- * Description:�xȡ��(d��ng)ǰ�ĜضȔ�(sh��)��(j��)���D(zhu��n)������ڔ�(sh��)�MTemperature(ֻ������һλС��(sh��)�� *
- * Parameter: *
- * *
- * Return: *
- ******************************************************************************/
- void v_TemperatureUpdate_f( void )
- {
- uint8 Tflag = 0 ;
- uint16 TempDat ;
- float Temp ;
- TempDat = v_Ds18b20ReadTemp_f() ;
- if( TempDat & 0xf000 )
- {
- Tflag = 1 ;
- TempDat = ~TempDat + 1 ;
- }
- Temp = TempDat >> 4; (TempDat * 0.0625 ) Ո��Ҳ�Ҫ�ó��ԣ���֪����ʲô���Կ�������ă�(n��i)��
- TempDat = Temp * 10 ; ;С��(sh��)���ÿ����ò�����������ʲô���k����ӑՓ�£��Ǻ�
- Temperature[ 0 ] = Tflag ; //�ض���ؓ(f��)��(bi��o)־
- Temperature[ 1 ] = TempDat / 100 + '0' ; //�ض�ʮλֵ
- Temperature[ 2 ] = TempDat % 100 / 10 + '0' ; //�ضȂ�(g��)λֵ
- Temperature[ 3 ] = TempDat % 10 + '0' ;//�ض�С��(sh��)λ
- }
�����@ȡ��(d��ng)ǰ�ĜضȔ�(sh��)��(j��)����������(sh��)���{(di��o)��v_TemperatureUpdate_f( void )�Ϳ����ˡ��ضȔ�(sh��)��(j��)�ͱ��浽Temperature��ȥ�ˡ���������@ʾ���Ͳ��ö��f�˰�~@_@~ �� �r(sh��)�g�͜ض�һ���@ʾ�������� OK,����ds18b20��ds1302�đ�(y��ng)�ø�һ���䡣����в����ģ�ӛ�ödatasheet,�ཻ����
ȫ���Y��51hei���d��ַ��
pdf��ʽ��
 �Ć�Ƭ�C(j��)���W(xu��)���~���Ƭ�C(j��)���̎�.pdf
(4.79 MB, ���d��(sh��): 163)
�Ć�Ƭ�C(j��)���W(xu��)���~���Ƭ�C(j��)���̎�.pdf
(4.79 MB, ���d��(sh��): 163)
2018-11-25 15:16 �ς�
�c(di��n)���ļ������d����
word��ʽ��
 �Ć�Ƭ�C(j��)���W(xu��)���~���Ƭ�C(j��)���̎�.doc
(2.05 MB, ���d��(sh��): 75)
�Ć�Ƭ�C(j��)���W(xu��)���~���Ƭ�C(j��)���̎�.doc
(2.05 MB, ���d��(sh��): 75)
2018-11-25 18:16 �ς�
�c(di��n)���ļ������d����
| 
 [��(f��)��朽�]
[��(f��)��朽�]

 ����TQQ:125739409;���g(sh��)����QQȺ281945664
����TQQ:125739409;���g(sh��)����QQȺ281945664