|
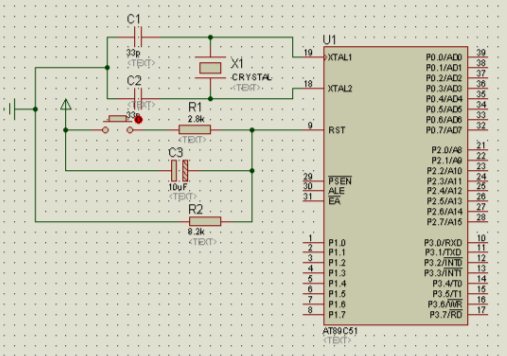
늙C(j��)�y��ϵ�y(t��ng) �S���Ƽ����w�ٰl(f��)չ��Ӌ��C(j��)��(y��ng)�ü��g(sh��)����B��������a(ch��n)����ĸ����I(l��ng)����Ƭ�C(j��)�đ�(y��ng)�Ät�����e���p�ص����á��ڹ��̌��`�У���(j��ng)�����������N��Ҫ�y���D(zhu��n)�ٵĈ��ϣ������ڰl(f��)�әC(j��)��늄әC(j��)���C(j��)�����S�����D(zhu��n)�O(sh��)���ԇ��\(y��n)�D(zhu��n)�Ϳ����У�����Ҫ�֕r���B�m(x��)�y�����@ʾ���D(zhu��n)�ټ�˲�r�ٶȡ������ܾ��_�y���D(zhu��n)�٣�߀Ҫ���C�y���Č��r�ԣ�Ҫ���ܜy��˲�r�D(zhu��n)�١�����O(sh��)Ӌһ�N�^�������늙C(j��)�y�ٿ���ϵ�y(t��ng)�Ƿdz��Ѓrֵ�ġ� 1.�ð��I����늙C(j��)��ͣ�� 2.늙C(j��)�ЃɷN�ٶȣ�ͨ�^���I����׃�ٶȣ� 3.ͨ�^��(sh��)�a���@ʾÿ��犻�ÿ����D(zhu��n)�١� �����O(sh��)Ӌ���� �ġ��O(sh��)Ӌ�����������������O(sh��)Ӌ�·�D�� 1�� STC89C52��Ƭ�C(j��)��B STC89C52��һ�N��8K�ֹ�(ji��)�W�q�ɾ��̿��߳�ֻ�x�惦����FPEROM-Flash Programmable and Erasable Read Only Memory ���ĵ�늉���������COMOS8��̎�������Q��Ƭ�C(j��)��ԓ��������ATMEL���ܶȷ���ʧ�惦�����켼�g(sh��)���죬�c���I(y��)��(bi��o)��(zh��n)��MCS-51ָ���ݔ�����_����ݡ� ��1����Ƭ�C(j��)��Сϵ�y(t��ng) ��Ƭ�C(j��)��Сϵ�y(t��ng)�·��D��ʾ����������STC89C52���r��·�͏�(f��)λ�·�����ֽM�ɡ���Ƭ�C(j��)STC89C52������Ŀ���������������ϵ�y(t��ng)�Ĺ��������r��·ؓ(f��)؟(z��)�a(ch��n)����Ƭ�C(j��)����������ĕr���̖����(f��)λ�·ʹ�Æ�Ƭ�C(j��)�܉�����������(w��n)���ع����� �D ��Ƭ�C(j��)��Сϵ�y(t��ng) ��2�������· 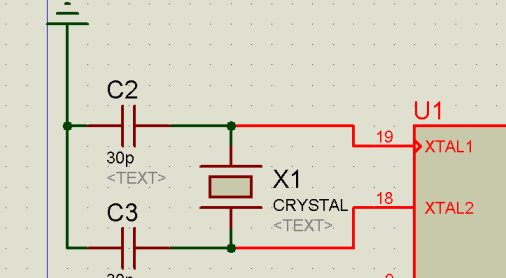
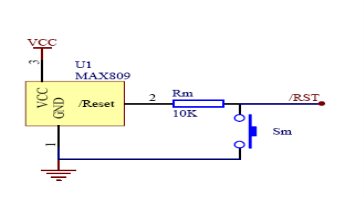
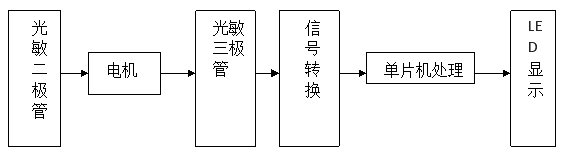
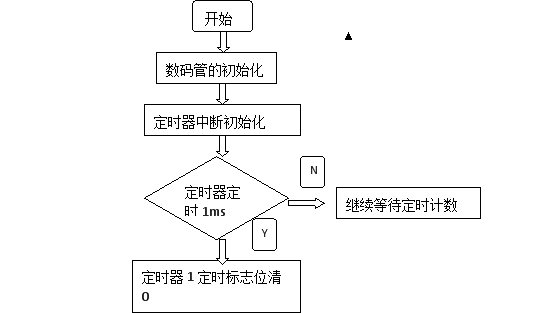
��3����(f��)λ�· ��(f��)λ�dž�Ƭ�C(j��)�ij�ʼ������������Ҫ�����ǰ�PC��ʼ����0000H��ʹ��Ƭ�C(j��)��0000H��Ԫ�_ʼ��(zh��)�г������M(j��n)��ϵ�y(t��ng)��������ʼ��֮�⣬��(d��ng)���ڳ����\(y��n)�г��e������e�`ʹϵ�y(t��ng)̎�����i��B(t��i)�r����[Ó������Ҳ�谴��(f��)λ�I�����ӡ� 2. ST151 ����D(zhu��n)�ق������Ǹ���(j��)�������O�ܹ���ԭ�������һ�N�Б�(y��ng)���չ⏊(qi��ng)��׃���������������(d��ng)���l(f��)���ĹⱻĿ��(bi��o)���������r���t�������Б�(y��ng)������(y��ng)�����̖���������{(di��o)�ƹ�Դ���ɹ���Ԫ���ȽM�ɵĹ�W(xu��)ϵ�y(t��ng)���Ŵ������_�P(gu��n)��ģ�M��ݔ���b�á����ʽ�������ɪ�(d��)�����������õĹ�l(f��)�������չ����M�ɡ���(d��ng)Ŀ��(bi��o)ͨ�^��l(f��)�������չ���֮�g�����⾀�r��������ݔ����̖�������~݆�����D(zhu��n)����(d��ng)�~݆���~�M(j��n)�밼���ړ����l(f��)����O�ܕr���������O�ܛ]���չ⣬ݔ�����㣻��(d��ng)�~݆���~ͨ�^��늂������r���������O�ܽ��չ���ST151�·ݔ�����l����̖�� 3. �O(sh��)Ӌ˼· ͨ�^ST151��늂���������늙C(j��)���~�D(zhu��n)���и�ĴΔ�(sh��)�@���}�_���Ķ�ͨ�^��Ƭ�C(j��)T1�ڽ��ոߵ��ƽ��Ӌ��(sh��)���ڶ��r���Ķ��r������(n��i)ӛ��}�_����(sh��)��ͨ�^Ӌ�㌢�D(zhu��n)���ͽo��(sh��)�a�ܲ��M(j��n)���@ʾ�� 4. �����D ��. ���� ��Ҋ���һ�� ����ϵ�y(t��ng)���� ��Ҋ��䛶��� �ߡ��O(sh��)Ӌ�w���c�ի@��С�M�ɆTÿ��һ�ݣ� XXX �����n���O(sh��)Ӌ����Ҫؓ(f��)؟(z��)�·��ĺ��ӣ��·��ĺ�����Ҫ���˽������·�ĸ���Ӳ���ĽM�ɣ�������������Ե����ڹ��܅^(q��)��Ȼ��Ҫ���ľ������·���Ϟ��Ӳ����һ�����w��Ҏ(gu��)�������m��Ҏ(gu��)������Ҫ����Ҫ���]�����w����ȥ�����^��߀Ҫ���]�����Ժ���{(di��o)ԇ���{(di��o)������ĵط������˾��w�������·���τ����_���w�Ĺ��܅^(q��)�����Ƭ�C(j��)����߅ռһ�K�m��(d��ng)?sh��)�λ�ã��������߀Ҫ���о����·�͏�(f��)λ�·��������������ģ�K�ķ��䡣�P(gu��n)���·�ľ��w���ӣ����XֻҪ�����·����D��һ���Ĵ��ӣ����˺��ӕr�ٶ��^�������ǻ������^������]�г��F(xi��n)�ܴ��}�� XX �����n���O(sh��)Ӌ����Ҫؓ(f��)؟(z��)����ľ����Լ��{(di��o)ԇ�������������Ҫ�������Д����a(ch��n)��PWM�������Д�y(t��ng)ӋST151�a(ch��n)�����l����̖�� ���õ��}Ŀ�r���R��һ�����}��������ó������׃�c(di��n)�����ٶȣ�Ո��ͬ�W(xu��)��֪��һ�N������ PWM��ͨ�^��׃һ�����ڵ����̖��ռ�ձȁ팍�F(xi��n)����(d��ng)Ȼ���ڌ�����r߀�������˲��ن��}���ȷ����I��ô�Дࡢ��׃ PWM ��ô���F(xi��n)����ô���^�m(x��)�a(ch��n)���ȡ� ����ĵڶ����c(di��n)�t�������Д����y(t��ng)Ӌ늙C(j��)�D(zhu��n)�Ӻ���ST151�a(ch��n)�����l����̖���@�����}ǰǰ������ˎN����������Ӌ��(sh��)���y(t��ng)Ӌ���xȡӋ��(sh��)ֵ��ͨ�^Ӌ��(sh��)���r�r�g���l���ٜ���1��ȡ��������ڷ�������(d��ng)���Y(ji��)����������Ч���ܲ��K�x�������r�r�gֱ��1���ف��y(t��ng)Ӌ�l�ʣ��@�ӵĽY(ji��)��߀�ǿ��Եġ� ����ĵ��������c(di��n)�����Д������O(sh��)Ӌ���@���ҵ�һ�ξ�C���������Д���кܶ���ĵط��������Y�ϡ�Ո��ͬ�W(xu��)������һ�����˽⣬�ٌ�����Ͳ�����ô����ˡ�
���Ό���(x��)�҂��M��ֱ��늙C(j��)�y��ϵ�y(t��ng)���O(sh��)Ӌ������Ҫͨ�^�D(zhu��n)�ٵĸ�׃�����ٶ��@ʾ��led�У����w�F(xi��n)���D(zhu��n)�ٵ������pС������θ�׃�������أ�����ͨ�^pwm��׃��ռ�ձȁ팍�F(xi��n)�ġ� ����Ҫؓ(f��)؟(z��)���棬��ʹ��ܛ��Proteus 7 Professional�yԇ�����{(di��o)ԇ���@�Ό���(x��)�����c(di��n)������ξ��������Լ������е����_�������_���B�ӆ��}����Ҫ��оƬ��89C52��uln2003��led�@ʾ��늙C(j��)�����ȷ�������_��ʲô���ã������f����Ҫ�c89C 2��XTAL1��XTAL2�B�ӵȵȡ����߀Ҫ֪���ǂ����_�Ǹ��ƽ�Ă��ǵ��ƽ�����l�B�����_(d��)���xͨ��ͨ�^ͬ�Mͬ�W(xu��)�������Ϳ��������֪���@ЩоƬ���B�ӣ��ټ�(x��)�ĵČ��ո������_�ij�ʼ�������x���B�Ӹ���оƬ���ڷ���ĕr���ҌW(xu��)���ľ����쾚����ʹ��proteus 7 Professionalܛ��������֪����proteus 7 Professional��������_���ҳ���Ƭ�C(j��)��uln��led�@ʾ��늙C(j��)���@ЩоƬ����ô��keil���\(y��n)��朽Ӻõij����䛵�proteus 7 Professional�У�Ȼ�����_���\(y��n)�С���(d��ng)ͬ�M��ͬ�W(xu��)��ð��Ӻ�ͨ�Դ�r�l(f��)�F(xi��n)led�@ʾ�����������Ծ��M(j��n)�и��M(j��n)��ͨ�^�ٽ���Ŵ����Ŵ���̖�Ϳ���ʹled���õ��@ʾ������ ���ā��f�@�Ό���(x��)������˜\�����H��Ϥ�˃ɂ�ܛ����ʹ�ø��M(j��n)һ���Č����W(xu��)��֪�R���`�˳�������ǰ�]����ô���|�^�@�ɂ�ܛ�����F(xi��n)�ڰl(f��)�F(xi��n)����Ҫ�W(xu��)��(x��)��߀�ܶࡣ����Ҳ�����ի@�ܶ��һ�c(di��n)��
�ڱ����n���O(sh��)Ӌ�У��҂������ǡ�ֱ��늙C(j��)�Ĝy��ϵ�y(t��ng)���� �ڌ���У��҂����������Ć��}����늙C(j��)�(q��)���е��l��׃�����}��һ�_ʼֻʹ����һ�����O�ܣ��Y(ji��)�������늙C(j��)�D(zhu��n)��ʼ�K̎��һ���^��(w��n)����B(t��i)����(j��ng)�^��(f��)λҲ�]��׃���������ԭ���A(ch��)��������һ�����O�ܣ��Ŵ����l����̖��ʹ�÷���INT0�ڵ���̖�����@���õ����A(y��)��ĽY(ji��)��ʹֱ��늙C(j��)�����׃�١� �ڌ�������҂���늙C(j��)�ѽ�(j��ng)����Ҫ������˸�׃�D(zhu��n)�ٵĹ��ܣ����ǔ�(sh��)�a�ܵ����Ⱥܰ��������֓����ſ��Կ�������w�@ʾ���@�ǔ�(sh��)�a�����Ȳ�����ɵģ�ͨ�^���������˵ڶ������裬��������Ƭ�x��̖��ͨ�^�@������ʹ�ù�ꖘO��(sh��)�a��׃���^���� �@�Ό���nj����W(xu��)�����W(xu��)�Ć�Ƭ�C(j��)�n�̵ĺ��Α�(y��ng)�ã��ڌ�����\(y��n)����80c52��Ƭ�C(j��)��ͨ�^�������늙C(j��)�ĺ����(q��)�ӣ��{(di��o)��(ji��)�D(zhu��n)��ʹ֮�������D(zhu��n)�پ��w���w�F(xi��n)�ڔ�(sh��)�a���ϵĹ��ܡ�
��䛶� ϵ�y(t��ng)�����·�D 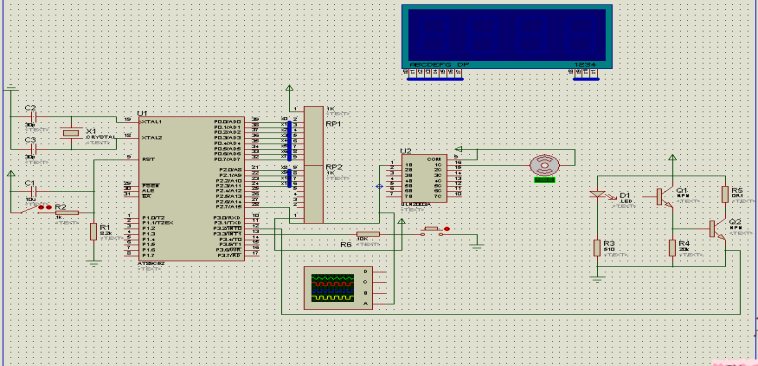
��Ƭ�C(j��)Դ��������:
- #include <reg52.h>
- unsigned char code TABLE[10] = {0xc0,0xf9,0xa4,0xb0,0x99,0x92,0x82,0xf8,0x80,0x90};
- void display();
- #define uint unsigned int
- #define uchar unsigned char
- #define V_TH1 (65535 - 1000) / 256
- #define V_TL1 (65535 - 1000) % 256
- sbit output = P2^7; //P2^7��ULN2003
- sbit key1 = P3^3; //P3^3�ӿ��Ը�׃늙C(j��)�D(zhu��n)�ٵİ��I
-
- int frq = 0, frq1, flag;
- char pwm;
- int div = 0, p = 0;
- uchar a;
- uint c;
- void display();
-
- /*ϵ�y(t��ng)��ʼ��*/
- void initial(void)
- {
- TMOD = 0x10; //�O(sh��)�ö��r��1�ڹ�����ʽ1��
- EA = 1; //�_�Д�
- EX0 = 1; //�ⲿ�Д�0ʹ��
- ET1 = 1; //���r��1ʹ��
- IT0 = 1; //�ⲿ�Д�0�½����|�l(f��)
- IT1 = 1; //�ⲿ�Д�1�½����|�l(f��)
- TH1 = V_TH1; //�b�dӋ��(sh��)ֵ
- TL1 = V_TL1;
- TR1=1; //���r��1�ɹ���
- }
-
- /*�ӕr����*/
- void delay(unsigned int k)
- {
- unsigned int i,j;
- for(i = 0;i < k;i++)
- {
- for(j = 0;j < 110;j++)
- {
- ;
- }
- }
- }
-
- /*�@ʾ�ӳ���*/
- void display()
- {
- uchar qian,bai,shi,ge;
- qian = 0;
- bai = 0;
- shi = 0;
- ge = 0;
- c = frq1;
- qian = c / 1000;
- bai = c / 100 % 10;
- shi = c / 10 % 10;
- ge = c % 10;
- P2 = 0X01;
- P0 = TABLE[qian];
- delay(5);
- P2 = 0X02;
- P0 = TABLE[bai];
- delay(5);
- P2 = 0X04;
- P0 = TABLE[shi];
- delay(5);
- P2 = 0X08;
- P0 = TABLE[ge];
- delay(5);
- }
-
-
- /*������(sh��)*/
- void main()
- {
-
- initial();
- while(1)
- {
- if(key1 == 0)
- delay(100); //���I����
- if(key1 == 0)
- {
- while(key1 == 0) ; //���֙z�y
- div ++;
- }
- if(div % 2 == 0)
- flag = 0;
- if(div % 2 == 1)
- flag = 1;
- if(flag == 0)
- pwm = 30;
- if(flag == 1)
- pwm = 70;
-
- display();
- }
- }
-
-
- /*�ⲿ�Д�0*/
- void int0isr() interrupt 0 //�y(t��ng)Ӌ���r�r�g��(n��i)�Ă���(sh��)
- {
- frq ++;
- }
-
-
- /*���r��1��*/
- void time1isr() interrupt 3 //���r��1���F(xi��n)pwm
- {
- TH1 = V_TH1; //�b�dӋ��(sh��)ֵ
- TL1 = V_TL1;
- EA = 0;
- a ++;
- p ++;
- if (a <= pwm)
- output = 1;
- else output = 0;
- if(a > 100)
- a = 0;
- if(p > 1000)
- {
- frq1 = frq;
- frq = 0;
- p = 0;
- }
- EA = 1;
- }
ȫ���Y��51hei���d��ַ��
 ��Ƭ�C(j��)��ֱ��늙C(j��)�y��ϵ�y(t��ng).doc
(197 KB, ���d��(sh��): 188)
��Ƭ�C(j��)��ֱ��늙C(j��)�y��ϵ�y(t��ng).doc
(197 KB, ���d��(sh��): 188)
2018-11-29 17:16 �ς�
�c(di��n)���ļ������d����
| 

 ����TQQ:125739409;���g(sh��)����QQȺ281945664
����TQQ:125739409;���g(sh��)����QQȺ281945664