這是相關電磁組資料
僅供參考
 
本文主要創新點如下:
1.提出了基于三次多項式曲線擬合的位置解算算法。該算法采用三次多項式來擬合通電導線周圍磁場強度變化曲線,從而解算出小車相對賽道的偏移距離。該算法在滿足實時性與檢測精度的前提下,對復雜賽道具有很強的適應性。
2.給出了基于賽道曲率的“阿克曼轉向”控制算法。該算法通過位置偏差計算出賽道曲率,然后應用“阿克曼轉向模型”計算出轉角控制量。該轉向控制算法能適應各種曲率的賽道,克服了已有方法在大半徑賽道中的抖動現象。
(2)電機驅動系統
可逆 PWM 變換電路有多種形式,最常用的是橋式(亦稱 H 型)變換器。它是由四個功率開關器件和四個續流二極管組成的電路,其特點是可以改變電機電樞上的電源電壓的正負極,使得直流電機可以在四象限中運行。

主控器系統包括單片機及其外部電路、人機接口模塊。競賽所使用的單片機為競賽組委會指定的飛思卡爾公司的 9S12XS128。它是以運算速度很快的 CPU12 內核為核心的單片機,經過鎖相環后,時鐘頻率可達到88MHz,內部 Flash 高至 128KB,擁有 2 組各 8 路 10 位 A/D、16 路 I/O 口,有功能強大的 8 路 8 位 PWM 輸出,以及 8 路 16 位增強型定時器(ECT)。該單片機功能強大,完全能夠勝任小車的檢測和控制功能。[3]
人機接口模塊是為了方便單片機與調試者之間的交互而設計的,一般包括 LED 指示燈、撥碼開關、鍵盤、液晶顯示屏、蜂鳴器、無線串口模塊和 SD 卡等。LED 可以顯示簡單的工作狀態,蜂鳴器可以用于告警和指示,撥碼開關可以用于簡單的模式設置,液晶顯示屏與鍵盤聯合使用可以進行實時調試,無線模塊用于少量數據 的收發,SD 卡可用于大量運行數據的存儲。
(4)傳感器系統
傳感器系統一般包括用于檢測交變磁場的電磁傳感器模塊、起始線檢測模塊、用于檢測小車速度的脈沖編碼器模塊、檢測小車加速度的加速度模塊和檢測小車傾斜角度的角度傳感器或陀螺儀。
(a) 電磁傳感器模塊
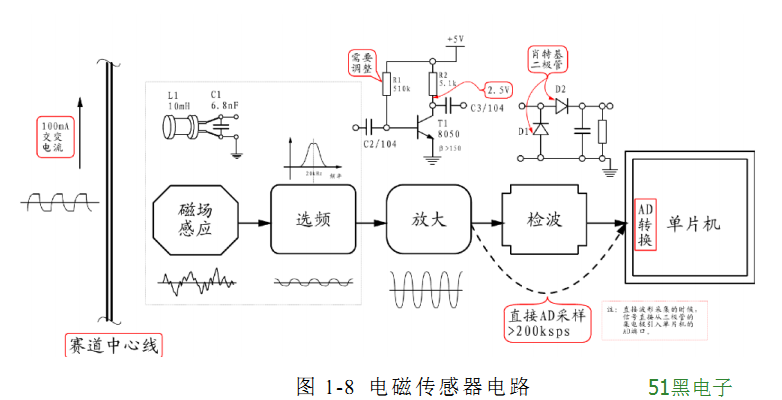
電磁組的傳感器用于磁定位,根據誘導信號的產生方式不同分為信號電纜、磁帶、道路磁釘及磁釘與磁帶混合定位等。這次比賽所用的就是通有 20kHz、100mA 交流電的導線。傳感器的種類有很多:磁通門傳感器、霍爾傳感器、磁阻傳感器等。
通過理論計算,100mA 交流電的導線有效距離內的磁場強度為 10-4
-10-2
Gs, 因此可供選擇的傳感器有電磁感應線圈、霍爾效應電磁傳感器等。 傳感器電路中的放大電路通常有兩種方案,一種是三極管放大,一種是采用運放放大。兩種方案各有優缺點。
使用運放的放大電路具有增益可調、放大線性度好、輸出紋波小等優點。但是運放一般都需要正負供電電源,而負電源較難設計;運放的輸出電壓范圍要比輸入電壓低,從而限制了信號輸入范圍;且工作參數滿足我們需求的運放價格都比較昂貴。
使用三極管放大電路具有電路簡單、開關速度高、能很好的放大交流信號等優點。但是三極管放大靜態工作點難調、放大倍數不高、容易出現各種失真等現象。
在上屆比賽中,各參賽隊基本都使用了以電磁線圈為測量元件、以三極管為放大元件和兩倍壓半波整流電路構成傳感器電路。

(b) 起始線檢測模塊
起始線檢測傳感器用于檢測磁場強度為 3000Gs-5000Gs 的永久磁鐵,常用的傳感器為霍爾元件或磁敏開關器件(干簧管)。
脈沖編碼器又稱碼盤,是一種回轉式數字測量元件,通常裝在被檢測軸上,隨被測軸一起轉動,可將被測軸的角位移轉換為增量脈沖形式或絕對式的代碼形式。根據 內部結構和檢測方式碼盤可分為接觸式、光電式和電磁式 3 種。其中,光電碼盤在數控機床上應用較多,而由霍爾效應構成的電磁碼盤則可用作速度檢測元件。另外,它還可分為絕對式和增量式兩種。
目前被各參賽隊廣泛使用的脈沖編碼器為歐姆龍公司的光電編碼器或遠征公司的光電編碼器。
(d) 加速度傳感器模塊及傾角傳感器模塊
為了獲取小車在運動中橫向、縱向加速度及車輛傾斜角,對小車的運動姿態進行更加有效地控制,就必須要獲得小車在運動過程中的三個方向的加速度及傾斜角。
目前各參賽隊廣泛使用飛思卡爾公司的 MMA7260 模擬加速度傳感器或 MMA7450 數字加速度傳感器來測量加速度或傾角。有的隊還使用高性能的陀螺儀來測量小車經過坡道時的傾角。
(5)車體系統
車體系統包括舵機安裝與轉向機構設計,主銷后傾角、主銷內傾角、前輪外傾角、前輪前束優化調整,車體重心配置,差速器優化等方面。 主銷后傾角是指主銷的軸線相對于車輪的中心線向后傾斜的角度。前輪重心在主銷的軸線上由于主銷向后傾斜使前輪的重心不在車輪與地面的接觸點上,于是產生了 離心力,主銷后傾形成的離心力,可以保證汽車直線行駛的穩定性還可以幫助車輪自動回正。主銷后傾角延長線離地面實際接觸越遠,車速越高,離心力就越大。在 中高速行駛中保持汽車直線行駛的穩定性,適當的加大主銷后傾角可以幫助轉向輪自動回正,可有效扼制轉向器的擺振,可使轉向便輕,單獨適量調一側主銷后傾角 可修理行駛跑偏。
主銷內傾角是指主銷的軸線相對于車輪的中心線向內傾斜的角度。由于主銷軸線向內傾斜,所以使前軸荷更接近前輪中心線。主銷內傾軸線延長線在沒超過前輪中心線的前提下,離前輪中心線越近,轉向角越大,轉向輪抬起的越高,車輪的回正力矩就越大。
轉向輪上端略向外傾斜叫前輪外傾角。它的作用是增大車輪工作的安全性。汽車在空載時如車輪垂直于路面,承載后由于懸架的變形會出現車
輪內傾,使前輪軸荷輪轂外端轉移,由于外端軸承明顯小于內端軸承,于是就增大了車輪工作的不安全性。為了增大車輪工作的安全性,大部分后
輪驅動汽車,前輪都留有一定的外傾角,承載后車輪正好垂直于路面。 前輪前束為了抵消前輪外傾點來轉向輪向兩側滾開的趨勢,最大限度地減少車輪行駛中的橫向滑移率。它可以修正前輪外傾帶來的不良影響。
1.2.2 軟件系統
軟件系統主要包括橫向控制算法及縱向控制算法。橫向控制算法包括位置解算算法和舵機控制算法,縱向控制算法包括速度規劃算法和電機控制算法。
(1)位置解算算法
目前被各隊廣泛采用的位置解算算法主要有兩種,一是基于無限長導線電磁感應公式,解算出偏離賽道信息,簡稱公式法;二是通過對稱傳感器的差值在一定范圍內近似線性化來近似得出偏離賽道信息,簡稱差值斜率法。
(2)速度規劃算法
速度規劃算法沒有固定的形式,有的小車根本沒有速度規劃,只是單純地建立了位置偏差與速度對應關系,通過位置偏差得出期望運行速度。從上年的情況來看,取 得好成績的隊伍都是使用了比較有效的速度規劃算法。在通常情況下,速度規劃算法應包括入彎減速算法、出彎加速算法、坡道低速算法等。
(3)控制算法
目前最常用的控制算法是 PID 控制算法。PID 控制是按偏差的比例、積分和微分進行控制的一種控制規律。它具有原理簡單,易于實現,參數整定方便,結構改變靈活,適用性強等優點。由于賽道情況復雜,干擾較多,
突變較多,加入微分控制會對電機造成很大干擾,因此電機控制算法使用PI 控制算法;由于舵機是一個大延遲系統,加入積分控制會使系統不穩定,而且小車運動過程中不需要考慮之前走過的路徑,因此舵機控制算法使用PD 控制算法。
4.1.1 調試軟件實時調試
在軟件上,可以使用 Codewarrior4.7 的仿真功能,通過 BDM 仿真器觀察程序中參數的變化。本調試方法可以用來測試小車算法,觀察小車錯誤,實時性強,調試結果清晰,并且可以設置斷點,進入程序內部觀察程序走向。但 該調試方式受單片機內存的限制,不能存儲大量的數據,因此不能用作整車的數據分析。
4.1.2 雙機通信實時調試
為了方便的獲小車的各種信息 , 專門購 買了用于航模的
APC200A-43 多通道微功率嵌入式無線數傳模塊作為無線傳輸工具。
APC200A-43 模塊是高度集成半雙工微功率無線數據傳輸模塊,其嵌入高速單片機和高性能射頻芯片。APC200A-43 模塊提供了多個頻道的選擇,能夠透明傳輸任何大小的數據,而用戶無須編寫復雜的設置與傳輸程序,并提供 UART/TTL,RS485 以及 RS232 三種接口。同時小體積,寬電壓運行,較遠傳輸距離,豐富便捷的軟件編程設置功能,使 APC200A-43 模塊能夠應用與非常廣泛的領域。將一個 APC200A-43 作為單片機終端,另一個經過 USB 轉接口作為 PC 機終端。通過單片機的 SCI 模塊,向上位機發送數據。
4.1.3 MATLAB 或 EXCEL 數據分析
MATLAB 可以用來對算法進行仿真,在前期用來驗證算法的可行性。 通過無線串口獲得小車的運行狀況的數據后,可以通過 EXCEL 將數據處理,繪制數據圖形,給人以直觀的印象,便于分析算法的優劣。其具體使用見 4.2 節。
4.2 調試流程及調試結果
4.2.1 位置解算算法仿真分析
使用 MATLAB 對公式 2-11 進行仿真,并取在傳感器對應位置的值來做位置解算算法的輸入,并通過 MATLAB 擬合分析,可以得到: 該車的實際偏移位置為 0cm,算法計算的偏移位置為-0.1cm,誤差為0.1cm。
綜上所述,該算法的精度在 5mm 以上,并且偏移位置越小,誤差越小,滿足了小車的控制要求。
4.2.2 電機 PI 參數測試
通過使用無線串口將單片機運動中的實時速度發送至計算機,然后通過 EXCEL 繪圖,便可得出在不同的控制參數下小車的速度趨勢曲線,便可從曲線中得出超調量、調節時間等動態參數。以下為期望速度為 200 時不同 PI 參數時的速度曲線。
由上述分析可得,增大 KI,速度的調節時間減少,超調量增加。通過多次數據比對,我們最后取得的電機 PI 參數為 KP=12,KI=0.7。
4.3 整車聯調測試及結果

測試賽道如圖 4-10 所示,該賽道具有元素多、難度大等特點。為了便于分析,將本賽道分解為幾個部分,分別是小 S 部分、大 S 部分、太極彎部分、直道入急彎部分、坡道部分、大回環部分。下面針對各部分進行賽道分析及展示調試結果。為了便于描述,下文中使用了弱化轉向、中等轉向、 強化轉向等術語,其含義是對算法得出的控制量乘以一定的系數。弱化轉向乘以小于 1 的系數,具體大小與控制量相關;中等轉向不改變控制輸出量;強化轉向乘以大于 1 的系數,具體大小與控制量相關。
1. 小 S 部分
小 S 道的偏移量相對較小,但是賽道曲率中心在不斷改變,需要頻繁換向,這對于前瞻不大、信息量不足的電磁小車來說,如果沒有一個很好的控制方案,小車在該賽道 中就會劇烈抖動,速度快的話就會跑出賽道。 本文提出的基于賽道曲率的“阿克曼轉向”控制方案與原始的基于位置偏差的控制方案不同,它可以實時預測到賽道的曲率及曲率中心的變化。當賽道的曲率較大且 曲率中心頻繁變換時,我們便可以知道小車正處于小S 道。此時我們便使用轉向弱化、中速前進的控制方案。小車在小 S 道的運動軌跡示意圖如圖 4-11 所示。

2. 大 S 部分
大 S 的偏移量相對較大,但是賽道的曲率中心不頻繁改變。在大 S 道中的轉向控制較為簡單,但是速度控制是一個難點。如何在大 S 道中實現彎道切換時減速,在彎道中加速,是提高競賽成績的一個關鍵點。 本文提出的基于賽道曲率的控制方案可以很好得解決上述問題。當賽道曲率不斷改變、曲率中心只出現一次改變時,我們就可以認為是進入了彎道切換狀態,此時便 采用加強轉向、低速前進的控制方案;當賽道曲率較大,曲率中心不變時,我們就可以認為是進入彎道狀態,此時采用中等轉向、中高速前進的控制方案。小車在大 S 道中的運動軌跡示意圖如圖 4-12所示。
3. 太極彎部分
太極彎部分的賽道間距較小,容易發生串擾現象;太極彎部分對小車的轉向性能要求很高,給予的調整空間較小。 本文提出的基于三次多項式擬合的位置解算算法魯棒性很高,可以克服各種干擾的影響,顯然臨近導線段對傳感器的干擾也可以大致消除。事實上,我們可以把太極 彎當做一個對轉向性能要求更高的大 S 道。因此,我們采用了強化轉向,低速前進的控制方案。小車在太極彎部分的運動軌跡示意圖如圖 4-13 所示。
4. 直道入急彎部分
在直道部分時,賽道曲率幾乎為 0。如果此時控制參數過大,容易產生頻繁抖動情況。若在直道時給予很高速度,那么在直道入急彎時便會因為轉向延遲而跑出賽道。
本文提出的基于賽道曲率的“阿克曼轉向”控制方案可以很好得解決這個問題。當賽道曲率小于一定值的時候,我們便采取弱化轉向、高速前進的控制方案。當賽道 曲率小于一定值持續了一定時間,我們便可以知道目前的賽道是直道,從而采取最高速前進方案。當檢測到賽道曲率有大變化時,我們便可知道前方有急彎,此時便 采取強化轉向,緊急剎車的控制方案。小車在直道入急彎部分的運行軌跡示意圖如圖 4-14 所示。
5. 坡道部分
比賽中所使用坡道為前后各 15° 的梯形坡,頂部為直道。爬坡時,傳感器的高度會不斷發生變化,從而導致傳感器的值也在不斷發生變化,這對基于公式的位置算法與對稱差值的位置算法帶來了很 大的誤差。本文提出的基于三次多項式擬合的位置解算算法的輸出只由當前的傳感器值決定,因此它可以很好得解決小車在坡道時的位置檢測問題。
由于小車在上下坡時的抖動很大,考慮到小車運動的穩定性,故小車在坡道上必須中低速前進。
6. 大回環部分
大回環的曲率一般較小,且賽道較長,如何在大回環提速,是提高小車速度的關鍵點之一。本文提出的基于賽道曲率的“阿克曼轉向”控制方案可以檢測出大回環的 曲率,并由此曲率計算出阿克曼轉角,控制舵機轉向,實現在轉角基本不變時高速前進。因此,在大回環賽道中,采取了中等轉向、高速前進的控制方案。小車在大 回環部分的運動軌跡示意圖如圖 4-15所示。
經過優化控制方案和改進算法,目前小車在本測試賽道上已經可以達到穩定速度 2.6m/s,峰值速度 2.8m/s 的水平。
完整的pdf格式文檔51黑下載地址:
 飛思卡爾技術報告.pdf
(3.04 MB, 下載次數: 542)
飛思卡爾技術報告.pdf
(3.04 MB, 下載次數: 542)
2018-12-2 16:50 上傳
點擊文件名下載附件
下載積分: 黑幣 -5
|




 [復制鏈接]
[復制鏈接]





 QQ好友和群
QQ好友和群 QQ空間
QQ空間 騰訊微博
騰訊微博 騰訊朋友
騰訊朋友 收藏
收藏 淘帖
淘帖 頂
頂 踩
踩


