
�Ԅ�(d��ng)�T���C(j��)�·�D.JPG (161.1 KB, ���d�Δ�(sh��): 125)
���d����
2018-12-12 10:20 �ς�
�Y�ϰ�����Փ�� + ����Դ���a + PCBԭ��D + оƬ�Y���փ�(c��)
Ŀ�
ժ Ҫ
һ. �������x���cՓ�C
1���(q��)��(d��ng)늙C(j��)
2. 늄�(d��ng)�C(j��)�(q��)��(d��ng)ģ�K
3. ̎����ģ�K
4. ���w�z�y(c��)ģ�K
5. ���ϙz�y(c��)ģ�K
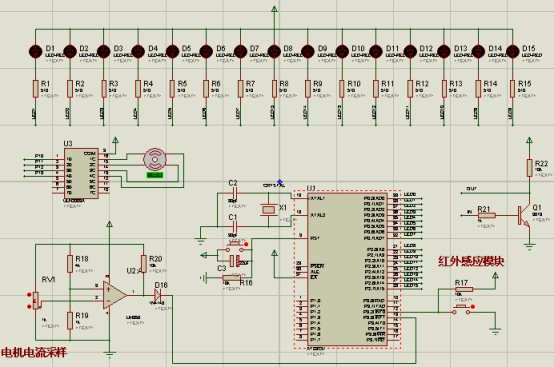
��. ϵ�y(t��ng)Ӳ���ľ��w�O(sh��)Ӌ(j��)�c��(sh��)�F(xi��n)
1. ϵ�y(t��ng)ԭ���Ϳ�D
2. ����ģ�K���O(sh��)Ӌ(j��)
2.1 ��Ƭ�C(j��)��B
2.1.1 AT89C51���_�f��
2.1.2 AT89C51��Ҫ����
2.1.3оƬ����
2.2 ���늼t���������B
2.3 BISS0001оƬ��B�͵����·
2.3.1 BISS0001�ă�(n��i)���Y(ji��)��(g��u)�����c(di��n)
2.3.2 BISS001���_�D�����_�f����
2.3.3 BISS0001����ԭ��
2.4 ���M(j��n)늙C(j��)
2.4.1 28BYJ48���M(j��n)늙C(j��)����(sh��)
2.4.2 28BYJ48���M(j��n)늙C(j��)�(q��)��(d��ng)��ʽ
2.4.3 ���M(j��n)늙C(j��)�(q��)��(d��ng)�·
��. ϵ�y(t��ng)ܛ���O(sh��)Ӌ(j��)
1. ���������c�O(sh��)Ӌ(j��)˼·
��1����������
��2�������O(sh��)Ӌ(j��)˼·
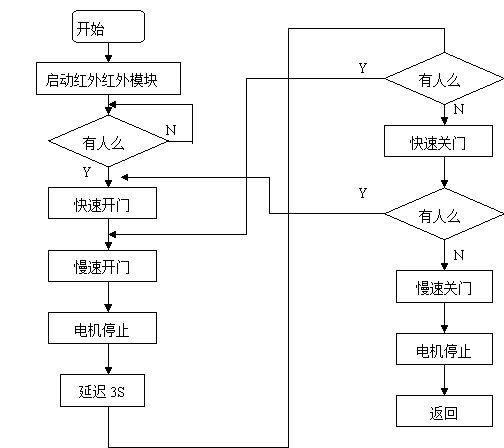
2. �������̈D
��1���Ԅ�(d��ng)�T����������
��2��LED���_�P(gu��n)�T���ƾ��a
��3�����M(j��n)늙C(j��)�����D(zhu��n)���a
3. ����
��. ���Y(ji��)
��. ���x
��. �����īI(xi��n)
�ߣ����
1.ԭ��D
2.������
ժ Ҫ
��ϵ�y(t��ng)�Ԇ�Ƭ�C(j��)AT89C51����ģ�ʹ�����w�t�⾀����������Б�(y��ng)�����z�y(c��)�����wݗ��ļt�⾀����׃���������D(zhu��n)�������̖(h��o)���|�l(f��)��Ƭ�C(j��)�Дࡣ���Ɇ�Ƭ�C(j��)ͨ�^ULN2003�(q��)��(d��ng)���M(j��n)늙C(j��)��(d��ng)����늙C(j��)�������D(zhu��n)�քe��ʾ�Ԅ�(d��ng)�T���_�����]�ϣ�ͨ�^15��(g��)LED������������ģ�M�_�P(gu��n)�T��B(t��i)��
һ. �������x���cՓ�C
����(j��)�O(sh��)Ӌ(j��)Ҫ��Ŀ�ģ���ϵ�y(t��ng)���Ԅ��֞����ɂ�(g��)����ģ�K�����˴���ܷ�(w��n)�����ⲿ�·����(sh��)�F(xi��n)�^�ߵ��ԃr(ji��)�ȣ�ʹ�Ԅ�(d��ng)�T�_(d��)�����������ܿ��ƣ�ᘌ�(du��)����(g��)ģ�K�Ĺ���Ҫ�քe������һЩ��ͬ���O(sh��)Ӌ(j��)������
1���(q��)��(d��ng)늙C(j��)
����A���x���M(j��n)늙C(j��)�����Ԅ�(d��ng)�T�����档���M(j��n)늙C(j��)���ă�(y��u)�c(di��n)�����ھ��x���܉�õ��^���_���ƣ��ڛ]���г��_�P(gu��n)����늙C(j��)ֹͣ����̖(h��o)�r(sh��)�����M(j��n)늙C(j��)�������x��
����B��������ֱͨ��늙C(j��)��ԓ늙C(j��)�D(zhu��n)�ٿ죬ᘌ�(du��)���O(sh��)Ӌ(j��)����r��늙C(j��)�^���\(y��n)�D(zhu��n)��(hu��)���ʧȥ�����������F(xi��n)�A�˵�ȱ�ݣ��ʴ��ų���
����C������ֱ���p��늙C(j��)��ԓ�����mȻ�܉�����늙C(j��)���ٶ���һ���ķ�λ��(n��i)���������ڛ]���г��_�P(gu��n)�������Դ���d��������(w��n)������r�£�늙C(j��)���y����ͬ�r(sh��)�g��(n��i)���^��ͬ�ľ��x���@���o���_(d��)����(zh��n)�_�_�P(gu��n)�T��Ŀ�ġ�
��˲��õ�һ�N�����IJ��M(j��n)늙C(j��)늙C(j��)�������Ԅ�(d��ng)�T�����档
2. 늄�(d��ng)�C(j��)�(q��)��(d��ng)ģ�K
����A�������^�����(du��)늙C(j��)���_���P(gu��n)�M(j��n)���_�P(gu��n)���ГQ��(j��ng)���{(di��o)�����@��(g��)������(ji��n)�ε�������(y��ng)�r(sh��)�g�����C(j��)е�Y(ji��)��(g��u)���דp�IJ��҉������L(zh��ng)��
����B���������։�ԭ�������Ô�(sh��)���λ���{(di��o)��늙C(j��)�ķ։����Ķ��_(d��)���{(di��o)�ٵ�Ŀ�ġ�ȱ�c(di��n)�ǟo���ô�����(q��)��(d��ng)��������Ч�ʶ��Ҳ���(sh��)�F(xi��n)��
����C��ʹ��ULN2003�(q��)��(d��ng)оƬ��ULN2003 �Ǹ��͉����������(f��)�Ͼ��w����У����߂�(g��)��NPN ��(f��)�Ͼ��w�ܽM�ɣ����ݔ��������_(d��)500mA���Á��(q��)��(d��ng)���O(sh��)Ӌ(j��)���õ������ಽ�M(j��n)늙C(j��)�dz��m�ϡ�
����M�õ����N������
3. ̎����ģ�K
����һ�����ÿɾ���߉����CPLD��CPLD���Ԍ�(sh��)�F(xi��n)���N��(f��)�s��߉���ܡ�Ҏ(gu��)ģ���ܶȸߡ�IO�YԴ�S�����m�������Ҏ(gu��)ģ����ϵ�y(t��ng)�Ŀ��ƺ��ġ�����ϵ�y(t��ng)����Ҫ��(f��)�s��߉���ܣ���(du��)��(sh��)��(j��)��̎���ٶȵ�Ҫ��Ҳ���Ǻܸߣ��ҏ�ʹ�ü���(j��ng)��(j��)�ĽǶȿ��]���҂��ŗ��˴˷�����
������������51ϵ�І�Ƭ�C(j��)��ϵ�y(t��ng)��Ҫ�ߣ�����ľ���Ҳ���^��(ji��n)�Σ���Ҫ�õ���I/O�ڵĔ�(sh��)����ԓϵ�еĆ�Ƭ�C(j��)��������ȫ�܉�?q��)��F(xi��n)���o���ٔU(ku��)չ����ֵ������ˆ�Ƭ�C(j��)�YԴ�����⣬��(j��ng)���51ϵ�І�Ƭ�C(j��)��̎���ٶ�Ҳ�܉�M��ϵ�y(t��ng)Ҫ���ԃr(ji��)������(du��)CPLD�������ߡ�
�C�����σɷN��������ϵ�y(t��ng)�x��������AT89C51����ϵ�y(t��ng)����������
4. ���w�z�y(c��)ģ�K
����һ�����Б�(y��ng)�����ַQ�����_(d��)���܌�(du��)���w���Ƅ�(d��ng)�M(j��n)�з���(y��ng)���������(y��ng)Ѹ�ٱ��^�죬�m�����������ٶ��������ˆTͨ�^��(ch��ng)��������ȱ�c(di��n)��һ�����˲�����T���oֹ����(d��ng)�����_(d��)�㲻�ٷ���(y��ng)���@�r(sh��)���ϵ�y(t��ng)�o���P(gu��n)�T��̖(h��o)����ô�Ԅ�(d��ng)�T�͕�(hu��)�P(gu��n)�]�����F(xi��n)�A�ˬF(xi��n)��
�����������w�t����������܌�(du��)���w�Ĵ����M(j��n)�з���(y��ng)�������ˆT�Ƿ��Ƅ�(d��ng)��ֻҪ̎�ڸБ�(y��ng)���Ē��跶����������(hu��)�з���(y��ng)��������ֹ�Ԅ�(d��ng)�T�P(gu��n)�]�����Ǽt��Б�(y��ng)���ķ���(y��ng)�����Б�(y��ng)������һ�c(di��n)��
�C�ϣ����ڰ�ȫ���}�Ŀ��]�����˷�ֹ�Ԅ�(d��ng)�T���F(xi��n)�A����r���ڶ��N�t��������ȵ�һ�N�����������m���Ԅ�(d��ng)�T���O(sh��)Ӌ(j��)�cʹ�á�
5. ���ϙz�y(c��)ģ�K
����һ�����û��������������z�y(c��)����(j��ng)늙C(j��)��������ٌ��ɵ������ֵ�D(zhu��n)�Q��늉�����(j��ng)�^AD�D(zhu��n)�Q�������Ƭ�C(j��)��ԓ�����mȻ�Կ��ɔ_������(qi��ng)����������(du��)�ڱ�ϵ�y(t��ng)���f���r(ji��)��̫�F�����Ҳ��M(j��n)늙C(j��)���������Ҳ���^С��
���������������ɘӵķ�ʽ����늙C(j��)�Դݔ�봮��һ��(g��)��ֵ��1�Wķ�ĺϽ���裬������ֵ���С����(du��)늙C(j��)��Ӱ푿��Ժ��Բ�Ӌ(j��)�����ɚWķ���ɿ�֪�����ɶ˵�늉������^ԓ�����������һ�����ԓ늉�����늉����^���ķ���ݔ��ˣ��c�A(y��)�O(sh��)�yֵ�����^����(d��ng)����^��r(sh��)�����^��ݔ����(hu��)�a(ch��n)��һ��(g��)߅����׃���˕r(sh��)�|�l(f��)�Дֹ࣬ͣ�Ԅ�(d��ng)�T��(d��ng)����
�C�Ϸ�������������(ji��n)�οɿ������^�m�ϑ�(y��ng)���ڱ�ϵ�y(t��ng)�O(sh��)Ӌ(j��)�С�
��. ϵ�y(t��ng)Ӳ���ľ��w�O(sh��)Ӌ(j��)�c��(sh��)�F(xi��n) 1. ϵ�y(t��ng)ԭ���Ϳ�D ���w�t���Ԅ�(d��ng)�T����ϵ�y(t��ng)��Ӳ���M����D2-1��ʾ����ϵ�y(t��ng)��Ҫ��AT89C51��Ƭ�C(j��)��������·�����w�t��z�y(c��)�·�����M(j��n)늙C(j��)�����·�����ϙz�y(c��)�·���_�P(gu��n)�T��B(t��i)�@ʾ�·���岿�ֽM�ɡ���Ƭ�C(j��)ѭ�h(hu��n)�z�y(c��)���w�t��z�y(c��)�·���ϙz�y(c��)�·����(j��)�ˮa(ch��n)�����M(j��n)늙C(j��)������̖(h��o)��ͬ�r(sh��)LED������(du��)��(y��ng)����(d��ng)����(d��ng)�z�y(c��)�����˿����r(sh��)�����M(j��n)늙C(j��)���D(zhu��n)һȦ��LED�������g�����҃�߅��u�c(di��n)������ȫ�_�T��ȴ�����犣�����]���˿������˕r(sh��)�_ʼ�P(gu��n)�T�����M(j��n)늙C(j��)���D(zhu��n)һȦ��LED���Ƀ�߅�����g��uϨ�硣�Ԅ�(d��ng)�T���_�����Է֞�3��(g��)�A�Σ������dž�Ƭ�C(j��)�ڽ��ܵ�����������̖(h��o)��o�R�_(d��)һ��(g��)�����_������̖(h��o)��ʹ�R�_(d��)�Ա��^������ʹ������TѸ�ٴ��_��Ȼ�������ٹ������������_����ֽ�ֹ����(d��ng)���෴����(d��ng)�Ԅ�(d��ng)�T�P(gu��n)�]�r(sh��)�����ȼ��ٺ�p�٣��ٵ�ֹͣ���^�̡�
0.png (8.09 KB, ���d��(sh��): 95)
���d����
2018-12-12 21:02 �ς�
�D2-1 ϵ�y(t��ng)�O(sh��)Ӌ(j��)��D
���w�t��ģ�K̽�y(c��)�����˿����r(sh��)�����}�_��̖(h��o)���o���������������Д��֪ͨ���M(j��n)늙C(j��)�\(y��n)�У�ͬ�r(sh��)�O(ji��n)�ز��M(j��n)늙C(j��)�D(zhu��n)��(d��ng)�Ƕȣ��Ա�֪ͨ����һ���r(sh��)��������M(j��n)�������\(y��n)�С����M(j��n)늙C(j��)��ULN2003оƬ�����M(j��n)���_�P(gu��n)�T��һ��(g��)�_�T����������늙C(j��)형r(sh��)��D(zhu��n)�^360�㣬��֮���P(gu��n)�T�t��r(sh��)��D(zhu��n)360�㡣�����P(gu��n)�T�^����ͻȻ�����˿������˕r(sh��)��Ƭ�C(j��)�R������(y��ng)�Дֹ࣬ͣ늙C(j��)�P(gu��n)�T������늙C(j��)ֹͣ��λ���������_�T����(j��ng)�^3����Ԅ�(d��ng)�T���_ʼ�P(gu��n)�]��������(d��ng)�Дࡣ
2. ����ģ�K���O(sh��)Ӌ(j��) 2.1 ��Ƭ�C(j��)��B��Ƭ�C(j��)�ǰ���Ӌ(j��)��C(j��)��Ҫ���ֶ�������һ��(g��)оƬ�ϵĆ�оƬ��Ӌ(j��)��C(j��)�������\(y��n)��������������ݔ��ݔ���ӿڣ����ִ惦(ch��)���Լ�����һЩ߉����������һ��(g��)оƬ�ϣ��ʿ��ц�Ƭ�C(j��)������һ��(g��)�����ⲿ�O(sh��)�����Ӌ(j��)��C(j��)���ஔ(d��ng)��һ��(g��)�]���@ʾ�����]���I�P�������O(ji��n)�س���Ćΰ�C(j��)�� ���چ�ƬӋ(j��)��C(j��)�����w�eС�������p������٣�����(qi��ng)�̓r(ji��)��͵����c(di��n)�������ڔ�(sh��)��(j��)�������оƬ��(n��i)����̎���������\(y��n)���ٶȿ죬���ɔ_������(qi��ng)����Ƭ�C(j��)����ʮ��������ԁ����ڶ�ʮ����ĕr(sh��)�g��l(f��)չ����Ѹ�٣����яV����(y��ng)���ڸ��N�I(l��ng)��Ƭ�C(j��)����ͨӍ�ӿڣ��Æ�Ƭ�C(j��)�M(j��n)�нӿڵĿ����c��������Ƭ�C(j��)�c���C(j��)�ɲ��й��������������ϵ�y(t��ng)���\(y��n)���ٶȣ������ھW(w��ng)�j(lu��)ͨӍ�I(l��ng)��Ҳ�õ���Խ��Խ��đ�(y��ng)�á� AT89C51��һ�N��4K�ֹ�(ji��)�W�q�ɾ��̿ɲ���ֻ�x�惦(ch��)����FPEROM��Flash Programmable and Erasable Read Only Memory���ĵ�늉���������CMOS8λ̎�������Q��Ƭ�C(j��)��AT89C2051��һ�N��2K�ֹ�(ji��)�W�q�ɾ��̿ɲ���ֻ�x�惦(ch��)���Ć�Ƭ�C(j��)����Ƭ�C(j��)�Ŀɲ���ֻ�x�惦(ch��)�����Է���(f��)����100�Ρ�ԓ��������ATMEL���ܶȷ���ʧ�惦(ch��)�����켼�g(sh��)���죬�c���I(y��)��(bi��o)��(zh��n)��MCS-51ָ���ݔ�����_����ݡ����ڌ����8λCPU���W�q�惦(ch��)���M���چ�(g��)оƬ�У�ATMEL��AT89C51��һ�N��Ч��������AT89C2051������һ�N����(ji��n)�汾��AT89C51��Ƭ�C(j��)��ܶ�Ƕ��ʽ����ϵ�y(t��ng)�ṩ��һ�N�`���Ը��҃r(ji��)���ķ����� AT89C51���μ����_������D2-1��ʾ�� 
�D2-1 AT89C51���μ����_�D 2.1.1 AT89C51���_�f��VCC�����늉��� GND���ӵء� P0�ڣ�P0�ڞ�һ��(g��)8λ©��(j��)�_·�p��I/O�ڣ�ÿ�_������8TTL�T�������(d��ng)P1�ڵĹ��_��һ�Ό�1�r(sh��)�������x�����ݔ�롣P0�܉������ⲿ����(sh��)��(j��)�惦(ch��)���������Ա����x�锵(sh��)��(j��)/��ַ�ĵڰ�λ����FIASH���̕r(sh��)��P0������ԭ�aݔ��ڣ���(d��ng)FIASH�M(j��n)��У�(y��n)�r(sh��)��P0ݔ��ԭ�a���˕r(sh��)P0�ⲿ��횱����ߡ� P1�ڣ�P1����һ��(g��)��(n��i)���ṩ��������8λ�p��I/O�ڣ�P1�ھ��_���ܽ���ݔ��4TTL�T���P1�ڹ��_����1����(n��i)��������ߣ�������ݔ�룬P1�ڱ��ⲿ��������ƽ�r(sh��)����ݔ��������@�����ڃ�(n��i)�������ľ��ʡ���FLASH���̺�У�(y��n)�r(sh��)��P1������ڰ�λ��ַ���ա� P2�ڣ�P2�ڞ�һ��(g��)��(n��i)����������8λ�p��I/O�ڣ�P2�ھ��_���ɽ��գ�ݔ��4��(g��)TTL�T�������(d��ng)P2�ڱ�����1���r(sh��)������_����(n��i)������������ߣ�������ݔ�롣���������ݔ��r(sh��)��P2�ڵĹ��_���ⲿ���ͣ���ݔ��������@�����ڃ�(n��i)�������ľ��ʡ�P2�ڮ�(d��ng)�����ⲿ����惦(ch��)����16λ��ַ�ⲿ��(sh��)��(j��)�惦(ch��)���M(j��n)�д�ȡ�r(sh��)��P2��ݔ����ַ�ĸ߰�λ���ڽo����ַ��1���r(sh��)�������Ã�(n��i)��������(y��u)��(sh��)����(d��ng)��(du��)�ⲿ��λ��ַ��(sh��)��(j��)�惦(ch��)���M(j��n)���x���r(sh��)��P2��ݔ��������ܼĴ����ă�(n��i)�ݡ�P2����FLASH���̺�У�(y��n)�r(sh��)���ո߰�λ��ַ��̖(h��o)�Ϳ�����̖(h��o)�� P3�ڣ�P3�ڹ��_��8��(g��)����(n��i)�����������p��I/O�ڣ��ɽ���ݔ��4��(g��)TTL�T�������(d��ng)P3�ڌ��롰1������������(n��i)����������ƽ��������ݔ�롣����ݔ�룬�����ⲿ��������ƽ��P3�ڌ�ݔ�������ILL���@�����������ľ��ʡ��ڌ�(sh��)�H��(y��ng)���У������(sh��)��r�¶�ʹ��P3�ڵĵڶ����ܡ� P3.0 ��RXD������ݔ��� P3.1 ��TXD������ݔ���� P3.2 ��/INT0���ⲿ�Д�0 P3.3 ��/INT1���ⲿ�Д�1 P3.4 ��T0��ӛ�r(sh��)��0�ⲿݔ�� P3.5 ��T1��ӛ�r(sh��)��1�ⲿݔ�� P3.6 ��/WR���ⲿ��(sh��)��(j��)�惦(ch��)�� P3.7 ��/RD���ⲿ��(sh��)��(j��)�惦(ch��)�� P3��ͬ�r(sh��)���W�q���̺;���У�(y��n)����һЩ������̖(h��o)�� RST����(f��)λݔ�롣��(d��ng)��ʎ����(f��)λ�����r(sh��)��Ҫ����RST�_�ɂ�(g��)�C(j��)�����ڵĸ��ƽ�r(sh��) ALE/PROG����(d��ng)�L���ⲿ�惦(ch��)���r(sh��)����ַ�i�����S��ݔ���ƽ�����i���ַ�ĵ�λ�ֹ�(ji��)����FLASH�������g�������_����ݔ�뾎���}�_����ƽ�r(sh��)��ALE���Բ�׃���l������ݔ�����}�_��̖(h��o)�����l�ʞ���ʎ���l�ʵ�1/6���������������(du��)�ⲿݔ�����}�_�����ڶ��r(sh��)Ŀ�ġ�Ȼ��Ҫע����ǣ�ÿ��(d��ng)�����ⲿ��(sh��)��(j��)�惦(ch��)���r(sh��)�������^һ��(g��)ALE�}�_�������ֹALE��ݔ������SFR8EH��ַ����0���˕r(sh��)�� ALEֻ���ڈ�(zh��)��MOVX��MOVCָ����ALE�������á����⣬ԓ���_�������ߡ����̎�������ⲿ��(zh��)�Р�B(t��i)ALE��ֹ����λ�oЧ�� /PSEN���ⲿ����惦(ch��)�����xͨ��̖(h��o)�������ⲿ����惦(ch��)��ȡָ���g��ÿ��(g��)�C(j��)�����ڃɴ�/PSEN��Ч�������L���ⲿ��(sh��)��(j��)�惦(ch��)���r(sh��)���@�ɴ���Ч��/PSEN��̖(h��o)�������F(xi��n)�� EA/VPP����(d��ng)/EA���ֵ��ƽ�r(sh��)���t�ڴ����g�ⲿ����惦(ch��)����0000H-FFFFH���������Ƿ��Ѓ�(n��i)������惦(ch��)����ע����ܷ�ʽ1�r(sh��)��/EA����(n��i)���i����RESET����(d��ng)/EA�˱��ָ��ƽ�r(sh��)�����g��(n��i)������惦(ch��)������FLASH�������g�������_Ҳ����ʩ��12V�����Դ��VPP���� XTAL1��������ʎ�Ŵ�����ݔ�뼰��(n��i)���r(sh��)犹����·��ݔ�롣 XTAL2�����Է�����ʎ����ݔ�����ݲ��҃��Y(ji��)��ʎ������ֹ��������оƬ���ܣ�ֱ����һ��(g��)Ӳ����(f��)λ��ֹ�� 2.1.2 AT89C51��Ҫ����* �cMCS-51 ���� * 4K�ֹ�(ji��)�ɾ����W�q�惦(ch��)�� * ������1000��/��ѭ�h(hu��n) * ��(sh��)��(j��)�����r(sh��)�g��10�� * ȫ�o�B(t��i)������0Hz-24Hz * ����(j��)����惦(ch��)���i�� * 128*8λ��(n��i)��RAM * 32�ɾ���I/O�� * �ɂ�(g��)16λ���r(sh��)��/Ӌ(j��)��(sh��)�� * 5��(g��)�Д�Դ * �ɾ��̴���ͨ�� * ���ĵ��e�ú͵��ģʽ * Ƭ��(n��i)��ʎ���͕r(sh��)��· 2.1.3оƬ��������(g��)PEROM��к�����(g��)�i��λ��늲�����ͨ�^���_�Ŀ�����̖(h��o)�M�ϣ�������ALE���_̎�ڵ��ƽ10ms ����ɡ���оƬ���������У����a���ȫ������1�������κηǿմ惦(ch��)�ֹ�(ji��)���؏�(f��)������ǰ��ԓ������횱���(zh��)�С� ���⣬AT89C51�O(sh��)�з�(w��n)�B(t��i)߉�������ڵ͵����l�ʵėl�����o�B(t��i)߉��֧�փɷNܛ�����x�ĵ��ģʽ�����e��ģʽ�£�CPUֹͣ��������RAM�����r(sh��)����Ӌ(j��)��(sh��)�������ں��Д�ϵ�y(t��ng)���ڹ������ڵ��ģʽ�£�����RAM�ă�(n��i)�ݲ��҃��Y(ji��)��ʎ������ֹ��������оƬ���ܣ�ֱ����һ��(g��)Ӳ����(f��)λ��ֹ�� 2.2 ���늼t���������B���늼t���������һ�N�ܙz�y(c��)�˻��(d��ng)��l(f��)��ļt�⾀��ݔ�����̖(h��o)�Ă�����������1938�꣬��������^���ß���Ч��(y��ng)̽�y(c��)�t��ݗ�䣬����δ�ܵ���ҕ��ֱ����ʮ������S�����⡢�t�⼼�g(sh��)��Ѹ�ٰl(f��)չ�������Ƅ�(d��ng)�ˌ�(du��)����Ч��(y��ng)���о��͌�(du��)���늾��w�đ�(y��ng)�á����늾��w�яV�����ڼt����V�x���t���b���Լ���ݗ��̽�y(c��)��������������t�⼤���һ�N�^�����̽�y(c��)������Ŀ��(bi��o)���ڱ��V���đ�(y��ng)�õ����N�Ԅ�(d��ng)�������b���С��������҂���֪�Ęǵ��Ԅ�(d��ng)�_�P(gu��n)�����I��(b��o)���ϵõ���(y��ng)���⣬�ڸ�����I(l��ng)��(y��ng)��ǰ�����á����磺�ڷ��g�o�˕r(sh��)��(hu��)�Ԅ�(d��ng)ͣ�C(j��)�Ŀ��{(di��o)�C(j��)���ˮ�C(j��)���ҕ�C(j��)���Д��o���^�����^���ѽ�(j��ng)˯�X���Ԅ�(d��ng)�P(gu��n)�C(j��)�ęC(j��)��(g��u)���_���O(ji��n)ҕ�����Ԅ�(d��ng)�T��ϵđ�(y��ng)�á��Y(ji��)�ϔzӰ�C(j��)��(sh��)�a�����C(j��)�Ԅ�(d��ng)ӛ䛄�(d��ng)����˵Ļ��(d��ng)�ȵȡ� ����Ч��(y��ng)ͬ���Ч��(y��ng)��ƣ���ָ���ڜضȵ�׃���������w�����늵ĬF(xi��n)���늂������nj�(du��)�ض����еĂ������������մ��������늾��wԪ���M�ɣ���Ԫ���ɂ�(g��)��������늘O���ڂ������O(ji��n)�y(c��)������(n��i)�ض��Ц�T��׃���r(sh��)������Ч��(y��ng)��(hu��)�ڃɂ�(g��)늘O�ϕ�(hu��)�a(ch��n)��늺ɦ�Q�����ڃ�늘O֮�g�a(ch��n)��һ����늉���V����������ݔ���迹�O�ߣ��ڂ���������һ��(g��)��(ch��ng)Ч��(y��ng)���M(j��n)���迹׃�Q������Ч��(y��ng)���a(ch��n)����늺ɦ�Q��(hu��)���՚��е��x�����Y(ji��)�϶���ʧ������(d��ng)�h(hu��n)���ضȷ�(w��n)����׃�r(sh��)����T=0���t�������oݔ������(d��ng)���w�M(j��n)��z�y(c��)�^(q��)�������w�ض��c�h(hu��n)���ض��в�e���a(ch��n)����T���t�Ц�Tݔ���������w�M(j��n)��z�y(c��)�^(q��)��(d��ng)���t�ضț]��׃����������Ҳ�]��ݔ���ˡ������@�N�������z�y(c��)���w���߄�(d��ng)��Ļ��(d��ng)���С� �Ɍ�(sh��)�(y��n)�C�������������ӹ�W(xu��)�R(Ҳ�Q�������R)����z�y(c��)���xС��2m�������Ϲ�W(xu��)�R����z�y(c��)���x�ɴ���7m�� 2.3 BISS0001оƬ��B�͵����·BISS0001��һ������^�����ܵĂ�����̖(h��o)̎�������·�������ԟ��늼t����������������Ԫ������(g��u)�ɱ���(d��ng)ʽ�ğ��늼t���_�P(gu��n)�������Ԅ�(d��ng)�����_����ן�����ɹ�������Q�����Ԅ�(d��ng)�T����L(f��ng)�ȡ���əC(j��)���Ԅ�(d��ng)ϴ�ֳص��b�ã��e�m������I(y��)���e�^���̈�(ch��ng)����(k��)������ͥ���^�������ȵ����Ѕ^(q��)�����ڰ�ȫ�^(q��)����Ԅ�(d��ng)���⡢�����͈�(b��o)��ϵ�y(t��ng)�������H�ܺ͟��늼t���������ݔ�����õ�ƥ�䣬����Ҳ�ܺ�������N�������M(j��n)��ƥ�䡣���ă�(n��i)�������\(y��n)��Ŵ�����늉����^�����c�T�·����B(t��i)�����������r(sh��)���������i���r(sh��)�g�������ͽ�ֹ�·�ȽM�ɡ�
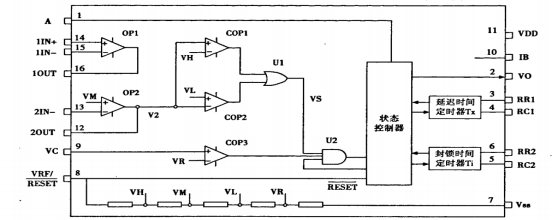
BISS0001����16�_��(bi��o)��(zh��n)�����Ϸ��b�Y(ji��)��(g��u)�� 1�_��A�����|�l(f��)��ʽ���ƶˣ���(d��ng)A��1�r(sh��)���·���؏�(f��)�|�l(f��)����(d��ng)A��0�r(sh��)���·�����؏�(f��)�|�l(f��)�� 2�_��V0���������̖(h��o)ݔ���ˣ���(d��ng)�Ђ�����̖(h��o)ݔ�˕r(sh��)��V0ݔ�����ƽ�� 3�_��RX����4�_��CX����ݔ�����r(sh��)������T�������Ԫ���ˣ����r(sh��)�r(sh��)�g�飺TX��50��103RXCX�� 5�_��Ri����6�_Ci�����i���r(sh��)�g��������i�����Ԫ�����i���r(sh��)�gTi��24RiCi�� 7�_��VSS�����Դ���ˡ� 8�_��VRF���酢��늉�����(f��)λ�ˣ�ʹ�Õr(sh��)һ���VDD��������SS����ʹ���r(sh��)����(f��)λ�� 9�_��Vc�����|�l(f��)��ֹ�ˣ���(d��ng)VC��VR�r(sh��)��ֹ�|�l(f��)����(d��ng)VC��VR�r(sh��)�����S�|�l(f��)��VR��0.2VDD. 10�_��IB����ƫ������O(sh��)�öˣ���������RB�Ӣ�SS�ˣ�RBһ��ȡ1M������衣 11�_��VDD�����Դ����ؓ(f��)�ˡ� 12�_��OUT2����ڶ���(j��)�\(y��n)�ŵ�ݔ���� 13�_��IN2-����ڶ���(j��)�\(y��n)�ŵķ���ݔ�˶ˡ� 14�_��IN1+����һ�\(y��n)�ŵ�ͬ��ݔ��ˡ� 15����IN1-����һ�\(y��n)�ŵķ���ݔ��ˡ� 16�_��OUT1�����һ�\(y��n)�ŵ�ݔ���ˡ� 2.3.1 BISS0001�ă�(n��i)���Y(ji��)��(g��u)�����c(di��n)��D2-3-1�У��\(y��n)��Ŵ���OPl�����늼t���������ݔ����̖(h��o)����һ��(j��)�Ŵ�Ȼ����C3��Ͻo�\(y��n)��Ŵ���01��'2�M(j��n)�еڶ���(j��)�Ŵ��ٽ�(j��ng)��늉����^��COPl��ODP2��(g��u)�ɵ��p���b����̎���z����Ч�|�l(f��)��̖(h��o)VSȥ����(d��ng)���t�r(sh��)�g���r(sh��)����ݔ����̖(h��o)VO��(j��ng)���w��T1�Ŵ��(q��)��(d��ng)�^���ȥ��ͨؓ(f��)�d��
�D2-3-1 ��ጼt�������̎��оƬ
BISS0001�����c(di��n)�� *CMOS��ˇ�����ĵ� *��(sh��)ģ��� *���Ъ�(d��)���ĸ�ݔ���迹�\(y��n)��Ŵ��� *��(n��i)�����p���b��������Ч���Ƹɔ_ *��(n��i)�O(sh��)���t�r(sh��)�g���r(sh��)���ͷ��i�r(sh��)�g���r(sh��)�� *����16�_DIP���b * ��(n��i)�Å����Դ
*����늉���������3V��5V) 2.3.2 BISS001���_�D�����_�f�����D2-3-2 BISS001���_�D BISS001���_�f���� ��2-3-2 BISS0001���_�f�� | | | | | | | ���؏�(f��)�|�l(f��)�Ͳ����؏�(f��)�|�l(f��)�x��ˡ���(d��ng)A�顰1���r(sh��)�����S�؏�(f��)�|�l(f��)����֮�������؏�(f��)�|�� | | | | ������̖(h��o)ݔ���ˡ���VS������׃���|�l(f��)��ʹVoݔ���ĵ��ƽ��׃�����ƽ�r(sh��)ҕ����Ч�|�l(f��)����ݔ�����t�r(sh��)�gTx֮��͟oVS������׃�r(sh��)��Vo���ֵ��ƽ��B(t��i)�� | | | | ݔ�����t�r(sh��)�gTx���{(di��o)��(ji��)�� | | | | ݔ�����t�r(sh��)�gTx���{(di��o)��(ji��)�� | | | | �|�l(f��)���i�r(sh��)�gTi���{(di��o)��(ji��)�� | | | | �|�l(f��)���i�r(sh��)�gTi���{(di��o)��(ji��)�� | | | | | | | | ����늉�����(f��)λݔ��ˡ�ͨ����VDD����(d��ng)�ӡ�0���r(sh��)��ʹ���r(sh��)����(f��)λ | | | | �|�l(f��)��ֹ�ˡ���(d��ng)Vc<VR�r(sh��)��ֹ�|�l(f��)����(d��ng)Vc>VR�r(sh��)���S�|�l(f��) | | | | �\(y��n)��Ŵ���ƫ������O(sh��)�ö� | | | | | | | | �ڶ���(j��)�\(y��n)��Ŵ�����ݔ���� | | | | �ڶ���(j��)�\(y��n)��Ŵ����ķ���ݔ��� | | | | ��һ��(j��)�\(y��n)��Ŵ�����ͬ��ݔ��� | | | | ��һ��(j��)�\(y��n)��Ŵ����ķ���ݔ��� | | | | ��һ��(j��)�\(y��n)��Ŵ�����ݔ���� |
2.3.3 BISS0001����ԭ��BISS0001�����\(y��n)��Ŵ�����늉����^������B(t��i)�����������t�r(sh��)�g���r(sh��)���Լ����i�r(sh��)�g���r(sh��)���Ș�(g��u)�ɵĔ�(sh��)ģ��ό��ü����·����(d��ng)���늼t����������յ����w�t��ݗ���ݔ���z�y(c��)��̖(h��o)��Ȼ����14�_ݔ��BISS0001,��(j��ng)��(n��i)���·̎������2�_ݔ��̽�y(c��)��̖(h��o)�������}�_��̖(h��o)����ݔ���}�_��̖(h��o)�Č�����������R9�����C6��Q������(d��ng) 2�_ݔ�������}�_������_�P(gu��n)����ͨ����(sh��)�־��a�·�͟o��늰l(f��)���·���ڵõ��Դ���_ʼ�������Դ׃������5W/15V��E��12V��S�o(h��)��늳أ���ͣ�ʹ�á�S1���i���Դ�_�P(gu��n)���ɸ���(j��)��Ҫ���b���m��(d��ng)̎�����Á���ͨ�����Դ���o��Ҫ�r(sh��)��ȡ���O(sh��)�á�SCR����1A�Ć���ɿع衣HFC9301��ܛ���b�l(f��)�·���l(f��)�顰�֡��֡����·���{(di��o)ԇ��Ҫ�����C(j��)�c���֙C(j��)֮�g�Ľy(t��ng)�{(di��o)�����l(f��)���·�ͽ����·�M�b�ú��Ȍ��l(f��)��C(j��)��C10���{(di��o)���m��(d��ng)λ�ú�̶�����(d��ng)�������{(di��o)�����ՙC(j��)�е�C1��ʹ���ՙC(j��)���յ��l(f��)��C(j��)�l(f��)������̖(h��o)�����顰һ��(du��)�ࡱ����(du��)һ����(b��o)��ϵ�y(t��ng)����(y��ng)�Ȍ����C(j��)��һ���������ǰl(f��)��C(j��)��Ҳ�����ǽ��ՙC(j��) ���{(di��o)�ù̶���Ȼ���{(di��o)�����֙C(j��)��ʹ���c���C(j��)�y(t��ng)�{(di��o)��BISS0001 ��(y��ng)�þ�·�D��D2-3-3-1��ʾ�� 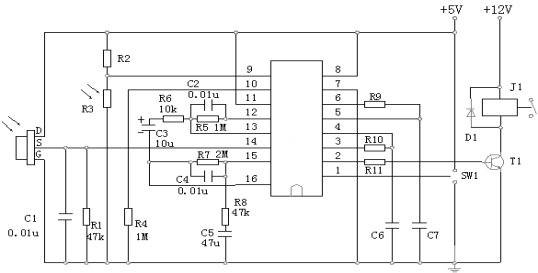 �D2-3-3-1 BISS0001�ğ��늼t���_�P(gu��n)��(y��ng)���·�D
�ψD�У�R3�������裬�Á�z�y(c��)�h(hu��n)���նȡ���(d��ng)�����������ƕr(sh��)�����h(hu��n)���^������R3�����ֵ��(hu��)���ͣ�ʹ9�_��ݔ�뱣�֞���ƽ���Ķ����i�|�l(f��)��̖(h��o)Vs��SW1�ǹ�����ʽ�x���_�P(gu��n)����(d��ng)SW1�c1���Bͨ�r(sh��)��оƬ̎�ڿ��؏�(f��)�|�l(f��)������ʽ����(d��ng)SW1�c2���Bͨ�r(sh��)��оƬ�t̎�ڲ����؏�(f��)�|�l(f��)������ʽ���D��R6�����{(di��o)��(ji��)�Ŵ�������Ĵ�С��ԭ�S�D���x10K����(sh��)�Hʹ�Õr(sh��)������3K����������·��������·���ܡ�ݔ�����t�r(sh��)�gTX���ⲿ��R9��C7�Ĵ�С�{(di��o)�����|�l(f��)���i�r(sh��)�gTi���ⲿ��R10��C6�Ĵ�С�{(di��o)����R9/R10������470�Wķ��C6/C7�����x0.1U����BISS0001�ă�(n��i)�·�У��\(y��n)��A��һ��(g��)��(d��)���ķŴ����������Ŵ��ݔ������̖(h��o)늉�ͨ�^. ֵ��һ����ǣ����O(sh��)Ӌ(j��)�����ѷ��b�õ����w�t��z�y(c��)ģ�K�������ԭ���c������ͬ��ģ�K��������(g��)���_��VCC��5V�Դ��GND�ӵأ�OUT����̖(h��o)ݔ��������̖(h��o)���_ֱ�ӽӵ���Ƭ�C(j��)INT0���_���@���ܕ�(hu��)������Ƭ�C(j��)���`�Д࣬��?y��n)�o�˿����r(sh��)����̖(h��o)ݔ�����ƽ����(d��ng)���˿����r(sh��)��ݔ����׃?y��u)�ߣ�����Ƭ�C(j��)�ⲿ�Д�߅���|�l(f��)��ģʽֻ�ܞ��½��أ������Ҫ����һ��(g��)�����·��������һ��(g��)NPN�����O�ܣ��·�D��2-3-3-2��ʾ�� 
�D2-3-3-2 ��̖(h��o)�����· ���w�t��ģ�K��̖(h��o)��͕r(sh��)��NPN���O�ܽ�ֹ��ݔ����ߣ���(d��ng)���˿����r(sh��)�����w�t��ģ�K����̖(h��o)��ߣ��˕r(sh��)���O�܌�(d��o)ͨ��ݔ�������ͣ���ݔ�����ƽ���@�ܱ��C��Ƭ�C(j��)�Д�ļ��r(sh��)푑�(y��ng)�����Cϵ�y(t��ng)��형��� 2.4 ���M(j��n)늙C(j��)2.4.1 28BYJ48���M(j��n)늙C(j��)����(sh��)���M(j��n)늄�(d��ng)�C(j��)�Ǽ���Ĕ�(sh��)�ֿ���늄�(d��ng)�C(j��)��������}�_��̖(h��o)�D(zhu��n)׃�ɽ�λ�ơ����oһ��(g��)�}�_��̖(h��o)�����M(j��n)늄�(d��ng)�C(j��)���D(zhu��n)��(d��ng)һ��(g��)�Ƕȣ���������m���چ�Ƭ�C(j��)���ơ��O(sh��)Ӌ(j��)�����õ���28BYJ48���M(j��n)늙C(j��)��늚�����������ʾ�� * �~��늉���12VDC(����늉���5V��6V��24V) * ����(sh��)��4 * �p�ٱȣ�1/64(���Мp�ٱȣ�1/16��1/32) * ����ǣ�5.625��/64 * �(q��)��(d��ng)��ʽ��4��8�� * ֱ����裺200����7%(25��)(���͑�Ҫ�������80��130�Wķ) * ���d�����l�ʣ���600Hz * ���d�����l�ʣ���1000Hz * �����D(zhu��n)�أ���34.3mN.m(120Hz) * �Զ�λ�D(zhu��n)�أ���34.3mN.m * �^����裺��10M��(500V) * �^����늏�(qi��ng)�ȣ�600VAC/1mA/1S * �^���ȼ�(j��)��A * ��������50K(120Hz) * ��������40dB(120Hz) 2.4.2 28BYJ48���M(j��n)늙C(j��)�(q��)��(d��ng)��ʽ ԓ���M(j��n)늙C(j��)�ЃɷN�(q��)��(d��ng)��ʽ��һ�N��һ����(l��)�ţ����M(j��n)���?y��n)飺A-B-C-D-A������Ǟ���С����ǵăɱ�����5.625��/64*2������һ�N�Q��1-2����(l��)�ţ����M(j��n)���?y��n)飺A-AB-B-BC-C-CD-D-DA-A������Ǟ�5.625��/64�����O(sh��)Ӌ(j��)�õ��ڶ��N�(q��)��(d��ng)��ʽ�������������2-4-2��ʾ��
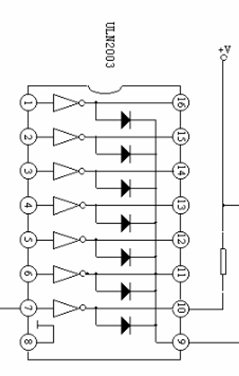
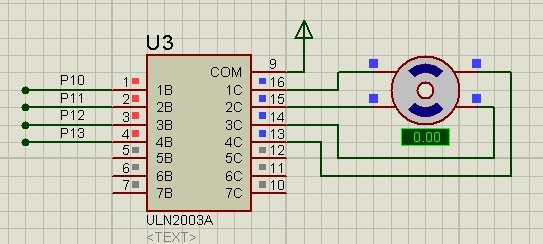
��2-4-2 ���M(j��n)늙C(j��)�(q��)��(d��ng)��ʽ���������r ֻҪ���շ���������νoԓ����ƽ��늙C(j��)�Ϳ������A(y��)���ķ�ʽ���D(zhu��n)�� 2.4.3 ���M(j��n)늙C(j��)�(q��)��(d��ng)�·ULN2003 �Ǹ��͉����������(f��)�Ͼ��w����У����߂�(g��)��NPN ��(f��)�Ͼ��w�ܽM�ɣ����ݔ��������_(d��)500mA�����(n��i)���Y(ji��)��(g��u)��D2-4-3-1��ʾ�� �D2-4-3-1 ULN2003��(n��i)���·
���еڰ��_�ӵأ��ھ��_��VCC��ֻҪ����Ƭ�C(j��)IO�ڽ����һ�����_���Ϳ��Ԍ�(du��)��(y��ng)�ĵ�ʮ��ʮ���_ݔ���^���������̖(h��o)�����ڱ��O(sh��)Ӌ(j��)���õ���������늙C(j��)����ֻ��Ҫ�õ����е��Č�(du��)�ӿڼ��ɣ���(du��)��(y��ng)���·�D��D2-4-3-2��ʾ��
�D2-4-3-2 ���M(j��n)늙C(j��)�(q��)��(d��ng)�·�Ӿ���ʽ
��. ϵ�y(t��ng)ܛ���O(sh��)Ӌ(j��) 1. ���������c�O(sh��)Ӌ(j��)˼· ��1���������� ��������Ҫ�õ���֪�R(sh��)�c(di��n)�У�?ji��n)�Ƭ�C(j��)�ⲿ�Дࡢ���r(sh��)�������M(j��n)늙C(j��)���(q��)��(d��ng)��ʽ�ͽǶ�Ӌ(j��)�㡢LED�����c(di��n)��Ϩ��ȡ����У��ⲿ�Д��Ȟ���Ҫ������μ������w�t��ģ�K�ęz�y(c��)��̖(h��o)ͨ�^��ͨIO�ڙz�y(c��)���@����(hu��)�a(ch��n)�����˽ӽ��Ԅ�(d��ng)�T����(y��ng)�t�g��A�˵ć�(y��n)�غ�������⣬Ӌ(j��)�㲽�M(j��n)늙C(j��)���^�ľ��xҲ��һ��(g��)Ҫ�c(di��n)����Ҫ���_Ӌ(j��)����ܴ_��늙C(j��)��һ��(g��)��ɵ��_�T���P(gu��n)�T��(d��ng)���Є������^360�㡣 ��2�������O(sh��)Ӌ(j��)˼· ���w�t��ģ�Kһ���z�y(c��)�����˿������˕r(sh��)�Д��|�l(f��)�������M(j��n)���ⲿ�Д�0����(zh��)��������һ���_�T��̖(h��o)���ȴ�3����������Д����(w��)�����_ʼ��(zh��)���P(gu��n)�T����(sh��)�������P(gu��n)�T�^���У������˿������Д���̖(h��o)���F(xi��n)���t�P(gu��n)�T����������ٴΈ�(zh��)���Д����(w��)�������P(gu��n)�T��λ�������_�������ѭ�h(hu��n)�� 2. �������̈D ��1���Ԅ�(d��ng)�T����������
�D3-1 �Ԅ�(d��ng)�T�������������̈D ��2��LED���_�P(gu��n)�T���ƾ��a ����(j��)Ӳ���ӿڣ����ƽ0��ʾ�c(di��n)��LED�������ƽ1��ʾϨ��LED����15��(g��)LED��������(d��ng)��ʽ���3-2-2��ʾ��
��3-2-2 LED��������(d��ng)��ʽ���a��
ע��������g��������u�c(di��n)����ʾ�_�T��������������g��uϨ���ʾ�P(gu��n)�T��
��3�����M(j��n)늙C(j��)�����D(zhu��n)���a ����(j��)Ӳ���·�ӷ�����(d��ng)ԓ����ƽ1�r(sh��)�����ھ�Ȧ��늣�늙C(j��)�D(zhu��n)��(d��ng)�����M(j��n)늙C(j��)�D(zhu��n)��(d��ng)һ��(g��)���ڵ���a���3-2-3��ʾ��
��3-2-3 ���M(j��n)늙C(j��)�(q��)��(d��ng)��a�� ���M(j��n)늙C(j��)���D(zhu��n)�t�nj��ڰ˲�׃?y��u)��һ�������߲�׃�(y��u)�ڶ������Դ���ơ?/div> 3. ���� ���w����Ҋ��䛡�
��. ���Y(ji��)
�ڴ˴����P(gu��n)�Ԅ�(d��ng)�T�Ŀ���ϵ�y(t��ng)���O(sh��)Ӌ(j��)���Ҹ��X���ˆ�Ƭ�C(j��)�ď�(f��)�s����ԣ������N���҂����ճ�����o�����ڣ���(y��ng)�ßo̎���У��������������е���ô��(ji��n)�Σ�Ҳ�����ǟo���˷��ı�����
�O(sh��)Ӌ(j��)Ӳ��֮ǰ��Ҫ�����ռ������P(gu��n)�Ļ��A(ch��)���Y�ϣ���(y��ng)�������õđ�(y��ng)��������͌��I(y��)���������(du��)�����P(gu��n)�ĿƼ��ڿ��͌����īI(xi��n)��ҲҪ��(j��ng)����x�Ա��˽����µİl(f��)չ��r�����b�F(xi��n)�ɵĽ�(j��ng)�(y��n)�������؏�(f��)�ڄ�(d��ng)�����O(sh��)Ӌ(j��)�У�Ҫ����˽�����оƬ��ʹ�×l����ݔ��ݔ�������ԣ��@�Ӳ��ܱ�����ʹ���e(cu��)�`�����ߏ�·��
�·�O(sh��)Ӌ(j��)���֑�(y��ng)ԓ�еľ�����ǏV���Y�ϡ�ֻ�{���Լ��^�X�е�֪�R(sh��)���h(yu��n)�h(yu��n)����ġ�������F(xi��n)�ˆ��}����Ҫ�����������ϾW(w��ng)���Y�ϡ���(d��ng)ȻҲҪ�_��(d��ng)�Լ����X������ʹϵ�y(t��ng)�·�������������ҵ��O(sh��)Ӌ(j��)�}Ŀ�ǻ��چ�Ƭ�C(j��)���Ԅ�(d��ng)�T����ϵ�y(t��ng)�O(sh��)Ӌ(j��)�����Ԅ�(d��ng)�T����Ȼ��(hu��)�õ�늄�(d��ng)�C(j��)��ÿ�N늙C(j��)���в�ͬ�����Ժ��ܣ����Ҫ�M(j��n)���x���ˡ����猦(du��)늙C(j��)���x�����Ҫ�x��������Ϥ�ģ����˽�ġ�
���·�O(sh��)Ӌ(j��)�r(sh��)����(y��ng)��ְl(f��)�]��Ƭ�C(j��)��ӛ���\(y��n)�㡢�Д����������������Ï�(f��)�s�ġ���(w��n)�����^���ģ�M�·��
����ʹ�C(j��)����ϵ�y(t��ng)���NӲ���O(sh��)���܉������\(y��n)�У���Ч�،�(sh��)�F(xi��n)늙C(j��)����(g��)���ƭh(hu��n)��(ji��)�Č�(sh��)�r(sh��)���ƺ���������Ҫ�O(sh��)Ӌ(j��)������Ӳ���·��߀���Ҫ�и��|(zh��)����ܛ��֧�֣��������o��ɣ���ͬ�S��ϵ�y(t��ng)�������\(y��n)����
����ҷdz����x�W(xu��)У���ώ��o�҂��@ô�õČW(xu��)��(x��)�C(j��)��(hu��)�����H��ȥ�w��(hu��)һ��(g��)�(xi��ng)Ŀ�_�l(f��)���D�y�ԣ���һ��վ��һ��(g��)�O(sh��)Ӌ(j��)�ߵĽǶ�ȥ�����w��(hu��)�����������D����ͬ�r(sh��)��Ҳ���ܵ����ώ���(du��)�҂��ĸ�������(du��)�҂��ľ���ָ��(d��o)�����������@�ΌW(xu��)��(x��)�΄�(w��)��
�ߣ���� 1.ԭ��D �D7-1 ��Ƭ�C(j��)�����Ԅ�(d��ng)�Tϵ�y(t��ng)ԭ��D
��Ƭ�C(j��)Դ��������:
- #include <reg51.h>
- #define uchar unsigned char
- #define uint unsigned int
- bit flag;
- int j; //����늙C(j��)�P(gu��n)�T׃��
- int n; //����늙C(j��)�_�T׃��
- unsigned code table[]={0x09,0x01,0x03,0x02,0x06,0x04,0x0c,0x08}; //1-2����(l��)�ŷ�ʽ ��С�����
- //unsigned code table[]={0x80,0x40,0x20,0x10}; //1����(l��)�ŷ�ʽ ��С�����*2
- //�t�����Դ��ֻҪ����һ������ƽ��ԓ����(d��o)ͨ����(d��ng)�����ģ��D(zhu��n)�^�ɂ�(g��)�����
- unsigned code OPEN_P0[]={0xff,0x7f,0x3f,0x1f,0x0f,0x07,0x03,0x01}; //LED��
- unsigned code OPEN_P2[]={0x7f,0x3f,0x1f,0x0f,0x07,0x03,0x01,0x00}; //LED��
- void delay(unsigned int t);
- void Delay_1s(uint y);
- void int0init(void);
- void Motor_GO(void);
- void Motor_BACK(void);
- void delay(unsigned int t)
- {
- while(t--);
- }
- void Delay_1s(uint y) //�ӕr(sh��)1s
- {
- uint a;
- for(a=0;a<200*y;a++) //200��1s
- {
- TH1=(65536-50000)/256;
- TL1=(65536-50000)%256;
- TR1=1;
- while(!TF1);
- TF1=0;
- }
- }
- void int0init(void) //�ⲿ�Д�0��ʼ��
- {
- EA=1; //���_����
- EX0=1; //�Д����Sλ
- IT0=1; //�ⲿ�Д�0�|�l(f��)��ʽ���½����|�l(f��)
- }
- void Motor_GO(void) //늙C(j��)���D(zhu��n)����(sh��)�����_�T
- {
- uchar m;
- while(n)
- {
- for(m=0;m<8;m++)
- {
- n--;
- P1=table[m];
- if(n>2000)
- delay(280); //�����_�T��Ȧ
- if(n<=2000)
- delay(480); //�����_�T��Ȧ
- }
- if((n<=4096)&(n>3800)) //LED����ʾ
- {
- P0=OPEN_P0[0];
- P2=OPEN_P2[0];
- }
- if((n<=3800)&(n>3500))
- {
- P0=OPEN_P0[1];
- P2=OPEN_P2[1];
- }
- if((n<=3500)&(n>3200))
- {
- P0=OPEN_P0[2];
- P2=OPEN_P2[2];
- }
- if((n<=3200)&(n>2900))
- {
- P0=OPEN_P0[3];
- P2=OPEN_P2[3];
- }
- if((n<=2900)&(n>1950))
- {
- P0=OPEN_P0[4];
- P2=OPEN_P2[4];
- }
- if((n<=1950)&(n>1000))
- {
- P0=OPEN_P0[5];
- P2=OPEN_P2[5];
- }
- if((n<=1000)&(n>50))
- {
- P0=OPEN_P0[6];
- P2=OPEN_P2[6];
- }
- if((n<=50)&(n>=0))
- {
- P0=OPEN_P0[7];
- P2=OPEN_P2[7];
- }
-
- if(n<0)
- {
- n=0; //������ѭ�h(hu��n)
- }
- }
- }
- void Motor_BACK(void) //늙C(j��)���D(zhu��n)����(sh��)�����P(gu��n)�T
- {
- uchar i;
- while(j)
- {
- for(i=0;i<8;i++)
- {
- j--;
- P1=table[7-i];
- if(j>2000)
- delay(280); //�����P(gu��n)�T��Ȧ
- if(j<=2000)
- delay(480); //�����P(gu��n)�T��Ȧ
- }
- if((j<=4096)&(j>3800)) //LED����ʾ
- {
- P0=OPEN_P0[7];
- P2=OPEN_P2[7];
- }
- if((j<=3800)&(j>3500))
- {
- P0=OPEN_P0[6];
- P2=OPEN_P2[6];
- }
- if((j<=3500)&(j>3200))
- {
- P0=OPEN_P0[5];
- P2=OPEN_P2[5];
- }
- if((j<=3200)&(j>2900))
- {
- P0=OPEN_P0[4];
- P2=OPEN_P2[4];
- }
- if((j<=2900)&(j>1950))
- {
- P0=OPEN_P0[3];
- P2=OPEN_P2[3];
- }
- if((j<=1950)&(j>1000))
- {
- P0=OPEN_P0[2];
- P2=OPEN_P2[2];
- }
- if((j<=1000)&(j>50))
- {
- P0=OPEN_P0[1];
- P2=OPEN_P2[1];
- }
- if((j<=50)&(j>=0))
- {
- P0=OPEN_P0[0];
- P2=OPEN_P2[0];
- }
- if(j<0) //������ѭ�h(hu��n)
- {
- j=0;
- }
- }
- }
- void main()
- {
- ����������������
- �����������ڱ���ƪ�� ���´��aՈ(q��ng)��51�����d������������
0.png (42.59 KB, ���d��(sh��): 124)
���d����
2018-12-12 21:01 �ς�
�����Y��51hei�ṩ���d:
 ���چ�Ƭ�C(j��)���Ԅ�(d��ng)�T����ϵ�y(t��ng).rar
(549.71 KB, ���d��(sh��): 555)
���چ�Ƭ�C(j��)���Ԅ�(d��ng)�T����ϵ�y(t��ng).rar
(549.71 KB, ���d��(sh��): 555)
2018-12-12 10:21 �ς�
�c(di��n)���ļ������d����
���d�e��: �ڎ� -5
| 



 [��(f��)��朽�]
[��(f��)��朽�]

 ����TQQ:125739409;���g(sh��)����QQȺ281945664
����TQQ:125739409;���g(sh��)����QQȺ281945664







 QQ���Ѻ�Ⱥ
QQ���Ѻ�Ⱥ QQ���g
QQ���g �vӍ��
�vӍ�� �vӍ����
�vӍ���� �ղ�
�ղ� ����
���� �
� ��
��