|
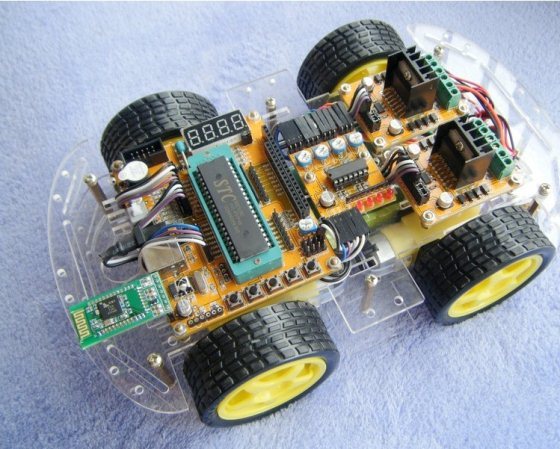
1 總體設計方案 本設計的研究內容包括小車的工作原理、單片機系統的軟件和硬件、電機驅動系統、藍牙通信系統,Android手機APP設計,。本設計需要達到的目標如下: (1) 可以通過Android手機客戶端操作界面實現小車的前進、后退、右轉彎、左轉彎、倒車右轉、倒車左轉等功能; (2) 結合Android系統開源特點、藍牙短距離無線傳輸的優勢以及單片機操作的簡便,實現手機的基本控制功能; (3) 可以在小車行走過程中通過Android手機客戶端利用APP界面的“按鈕”、重力、語音分別改變小車運動狀態; (4) 在超出藍牙控制范圍時,小車能夠自動停止運動。 1.1 上位機軟件設計 上位機開發使用的是由IBM提出的Eclipse開發環境,該開發環境功能完善、比較成熟。而Android是一個多任務操作系統,在執行一個應用程序時,可以把這個應用程序放在后臺,然后另外又執行其他的應用程序。但每多執行一個程序,就會多耗費一些系統內存,如果同時執行的任務過多或者沒有釋放之前執行任務的內存,Android系統運行起來就會變慢,甚至變得不穩定。 1.2 下位機軟件設計 下位機(單片機簡稱下位機)軟件開發環境使用的是Keil μVision 4開發環境,根據主控制器的要求選擇Keil μVision 4的Keil C51開發環境對整個下位機軟件進行開發,其開發語言使用的是C語言。 2 設計方案特點及擴展說明 本設計主要是將單片機電子技術、藍牙通信技術和計算機軟件技術等相關技術進行融會貫通,設計了該智能小車系統。 在主控芯片選擇時,選取功能俱全、價格低廉的芯片,通信方式上,選用最新的藍牙4.0技術,同時結合了移動智能終端來控制小車。設計方案的特色如下: (1) 小車的主控芯片選用宏晶公司的STC89C52,其具有8 kB的FLASH,3個定時器,軟件編程難度適宜,且芯片資源足夠本系統使用。 (2) 通信方式采用串口通信,利用藍牙技術實現對小車的控制。短距離通信方式主要有:Bluetooth,ZigBee,WiFi,UWB和NFC,相比這五種無線短距離通信,藍牙在移動智能終端的成本是最低的,同時在車載音響設備中已經有了應用,因此本方案選擇藍牙作為通信方式。 (3) 近幾年移動智能終端發展得越來越快、越來越好,手機、平板等都已進入了智能家居中,且這些設備都具備藍牙功能,在小車控制端選擇Android手機作為控制平臺是時代的潮流。 3 方案難點及關鍵技術 該方案難點在于: Android手機客戶端的APP編程。因為小車控制有虛擬按鍵、重力、語音三種控制方式,這樣在上位機編程上有很大的技術難點;藍牙模塊與下位機的串口通信和與上位機的無線通信。為了避免通信故障,在確定通信協議上有一定的難度;小車四個驅動電機的供電、主控芯片的供電和藍牙模塊的供電。 關鍵技術有:制定通信協議;設計Android手機APP;整個小車的供電系統。 4 系統仿真與結果分析 4.1 藍牙控制小車整體外觀 藍牙控制智能小車整體實物圖如圖1所示,圖1為小車的側視圖。整個小車有上位機和下位機兩部分組成,小車控制器部分主要包括直流電機控制,藍牙通信,電池供電等。 4.2 系統整體調試 藍牙控制智能小車最終實現的功能有:可以通過Android手機客戶端操作界面實現小車的前進、后退、右轉彎、左轉彎、倒車右轉、倒車左轉等功能;可在小車行走過程中通過手機客戶端利用APP界面的“按鈕”、重力、語音分別控制改變小車運動狀態;在超出藍牙控制范圍時,小車能夠自動停止運動。主要調試內容如下: (1) 藍牙通信測試。用APP按鍵控制小車的前進后退,小車可以進行相應的轉向操作,證明通信系統沒有問題,然后測試重力感應和語音控制,小車均正常工作。 (2) 小車運動測試。當小車收到手機APP發送的前進后退指令后,單片機會解析其指令并控制四個直流電機做相應的“動作”。“按鍵”、重力、語音三種控制方式,在軟件設計時采用了一定的技巧,單片機解析命令時不需要解析其是三種控制方式的哪一種,只需要解析前進、后退、左轉、右轉和停止五個命令。
5 結 語 通過多次反復調試和修改代碼,成功實現了藍牙小車預設的所有功能,在10 m范圍內通信穩定,控制可靠靈活。只是在上位機與下位機聯調的過程中遇到過一些麻煩,經過不斷的優化代碼最終實現了通信、控制“無障礙”。方案的意義在于將單片機電子技術,藍牙通信技術和智能終端設備有效的結合,深化了車聯網的概念,為車載電子的無線通信設計提供了一定的參考價值,本方案可推廣到車載藍牙系統,智能家居等領域。
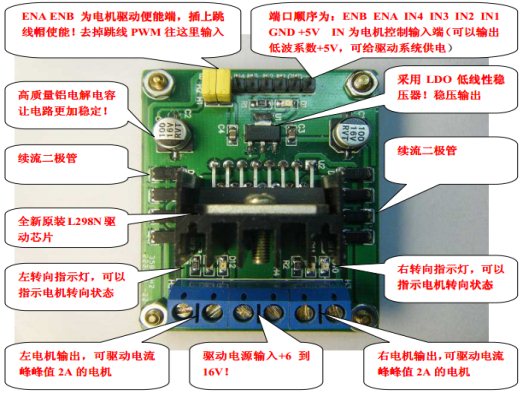
附錄: 圖一 二、智能小車各模塊功能介紹 1、小車底盤 小車底盤是機器人最重要的載體,相當于人體的軀干,ZK—4WD小車平臺采用差速轉彎,非常靈活,可以實現原地打轉。小車平臺大小剛好,可以承載一些如驅動器,控制器,電池,傳感器等  。 圖二 2、驅動模塊 我采用ST公司原裝全新的L298N芯片及高質量鋁電解電容,使電路穩定工作。小車直流電機工作電流一般是200—400mA,有些更大。如果一個小車是兩個輪子,那么總的電流在400--800 mA左右,這些電機輪子都是要接受單片機指令執行相應動作,而市面有的單片機IO口一般只能提供5--10 mA的電流,直接驅動不了單片機,所以就需要一個驅動模塊,就好像人的心臟功能。 圖三 3、控制模塊 我采用的控制器主控芯片是STC89C52屬于標準的51核的單片機,STC12C5A60S2內帶PWM,AD,1T運行速度(主流),集成USB轉串可以直接用USB下載程序。集成數碼管,舵機,紅外蔽障,12864,1602,無線模塊等接口,板載輸入按鈕 圖四 4、小車所需的能源 可以用普通的AA5號電池,我采用低內阻的充電電磁套裝,這是小車的動力之源,對外供電為7.2V。 圖五 這四部分都是必備的,有這四樣東西,就可以讓小車走起來,至于要怎么走,這個時候傳感器就開始大發神威了!
5、小車需要的各種傳感器
SG90舵機:里面有一個信號調制芯片,主要通過控制信號獲得直流偏置電壓,電壓差的正負輸出到電機的驅動芯片,決定電機的正反轉。當電壓差為0時,電機停止轉動。舵機內帶反饋裝置,又名伺服電機,由于有反饋,所以很容易控制,與我們的超聲波模塊組成,那就是絕配。
藍牙無線傳感器:可以用Android智能手機控制小車運行,Android手機用內置藍牙與藍牙無線模塊配對,手機發出指令,無線藍牙模塊接收指令。當單片機接收到藍牙無線模塊發出的指令后,執行相應的解碼動作,從而控制小車。
完整的Word格式文檔51黑下載地址: |