|
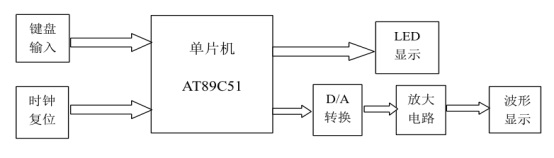
�����O(sh��)Ӌ(j��)���΄�(w��)���O(sh��)Ӌ(j��)����һ�����ΰl(f��)������ԓ���ΰl(f��)�����ܮa(ch��n)�����Ҳ������������Dz������Ñ������ض��Π�Ρ�ʾ��D���£� 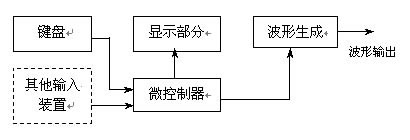
����Ҫ�����£� ��1�����Юa(ch��n)�����Ҳ������������Բ��εĹ��ܣ� ��2��ݔ�����ε��l�ʷ�����100Hz��20kHz�������Ҳ��l�ʰ�10���C��Ӌ(j��)�㣩���؏�(f��)�l�ʿ��{(di��o)���l�ʲ��M(j��n)�g����100Hz�� ��3��ݔ�����η��ȷ���0��5V����-��ֵ�����ɰ����M(j��n)0.1V����-��ֵ���{(di��o)���� ��4�������@ʾݔ�����ε���͡��؏�(f��)�l�ʣ����ڣ��ͷ��ȵĹ��ܡ�
1.1 ��������һ�����Æ�Ƭ����(sh��)�l(f��)�����ɮa(ch��n)�����Ҳ��������ȣ������������У��� D/A �D(zhu��n)�Q����ݔ������׃�{(di��o)��(ji��)늉������Ԍ�(sh��)�F(xi��n)��(sh��)���{(di��o)���l�ʣ����a(ch��n)����̖���l�ʷ�(w��n)���Ȳ��ߡ� ������������оƬ�M�ɵ��·ݔ�����Σ�MAX038��MAXIM��˾���a(ch��n)��һ��ֻ��Ҫ�����ⲿԪ���ľ��ܸ��l���ήa(ch��n)���������ܮa(ch��n)����(zh��n)�_�ĸ��l���Ҳ������Dz���������ݔ���l�ʺ�ռ�ձȿ���ͨ�^�{(di��o)�������늉��������քe�ؿ��ơ������ݔ�����ο�����A0��A1ݔ����O(sh��)���m��(d��ng)?sh��)Ĵ��a���x���Ҿ���ݔ���l�ʷ����������η�(w��n)����ʧ��С��ʹ�÷�������c(di��n)�� ������������Atmel��˾��AT89C51��Ƭ�C(j��)���̷�����(sh��)�F(xi��n)��ԓ��������ͨ�^���̵ķ���������̖���ε��l�ʺͷ��ȣ�����Ӳ���·�������r�£�ͨ�^����?q��)��F(xi��n)�l�ʵ�׃����ݔ�����ε��x��ͬ�r���@ʾ���@ʾ����(y��ng)�ĽY(ji��)���� ����һݔ����̖�l�ʲ���(w��n)�����������ɱ��ߣ������(f��)�s�ȸߣ�������ܛӲ���Y(ji��)�ϣ�Ӳ���ɱ��ͣ�ܛ�����c(di��n)�ͣ��ÅR���Z�Լ�����ɣ���(y��u)�����������^�ã�����(sh��)�F(xi��n)���ҝM���O(sh��)Ӌ(j��)Ҫ�C�Ͽ��]���҂������˷���������AT89C51��Ƭ�C(j��)�O(sh��)Ӌ(j��)�����̖�l(f��)�������܉�M����̖���l�ʷ�(w��n)���Ժ;��ȵĜ�(zh��n)�_�ԡ� 1.2 ϵ�y(t��ng)���� ��������AT89C51����ƺ��ģ���Ҫģ�K������(f��)λ�·���r���̖�l(f��)���·���I�P�����·��D/A�D(zhu��n)����LED�@ʾ�·����ԭ����D���£�
�I�P�����·�I�P�·�֞骚(d��)��ʽ���I�;��ʽ�I�P�����˺��������҂������˪�(d��)��ʽ�I�P����(d��)��ʽ���I��ֱָ����I/O�ھ���(g��u)�ɵĆ����I�·��ÿ����(d��)��ʽ���I�Ϊ�(d��)ռ��һ��I/O�ھ���ÿ��I/O�ھ��Ĺ�����B(t��i)����Ӱ�����I/O�ھ��Ĺ�����B(t��i)���@��һ�N������İ��I�Y(ji��)��(g��u)���·�D������ʾ: 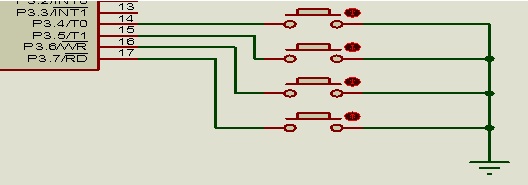
�D5 �I�Pݔ���· 2.5 LED�@ʾ�·
2.5.1 ��(sh��)�a�ܹ��ܽ�B ��(sh��)�a�ܵ����νY(ji��)��(g��u)���D��ʾ���ɈD��Ҋ����8���l(f��)����O�ܘ�(g��u)�ɣ�ͨ�^��ͬ�ĽM���Á��@ʾ0��9��A��F��С��(sh��)�c(di��n)��.���ȷ�̖����(sh��)�a��ͨ���й�ꎘO��ꖘO�ɷN��̖����ꎘO��(sh��)�a�ܵİl(f��)����O��ꎘO��횽ӵ��ƽ����(d��ng)ij�l(f��)����O�ܵ�ꖘO����ƽ(һ���+5V���r���˶��O���c(di��n)������ꖘO��(sh��)�a�ܵİl(f��)����O����ꖘO���ӵ����ƽ���������c(di��n)���İl(f��)����O��ʹ��ꎘO�ӵ��ƽ����(һ��ӵأ����@Ȼ��Ҫ�@ʾij���ξ͑�(y��ng)ʹ�����ε�����(y��ng)�ֶ��c(di��n)������(sh��)�H�����Ͳ�ͬ�ƽ�M�ϴ����Ĕ�(sh��)��(j��)����(sh��)�a�ܡ��@�N�b�딵(sh��)�a���@ʾ���εĔ�(sh��)��(j��)�Q���δa�� 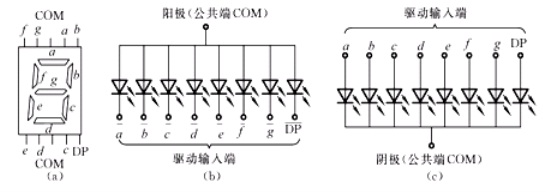
�D6 ��(sh��)�a��ԭ��D
Ҫʹ��(sh��)�a���@ʾ��ͬ�Ĕ�(sh��)�ֻ����ַ�����Ҫʹ�˿�ݔ������(y��ng)�����ʹa���@ʾ���������c�ִa�P(gu��n)ϵ���D��ʾ�� 
�D7 �δa�� 2.5.2 LED�ӑB(t��i)�@ʾԭ�����·LED��(sh��)�a�܄ӑB(t��i)�@ʾ�ӿ��dž�Ƭ�C(j��)�Б�(y��ng)�����V����һ�N�@ʾ��ʽ֮һ���ӑB(t��i)�(q��)���nj����Д�(sh��)�a�ܵ�8���@ʾ�P��"a,b,c,d,e,f,g,dp"��ͬ�����B��һ�������ÿ����(sh��)�a�ܵĹ����OCOM����λ�xͨ�����·��λ�xͨ�ɸ��Ԫ�(d��)����I/O�����ƣ���(d��ng)��Ƭ�C(j��)ݔ�����δa�r����Ƭ�C(j��)��λ�xͨCOM���·�Ŀ��ƣ������҂�ֻҪ����Ҫ�@ʾ�Ĕ�(sh��)�a�ܵ��xͨ���ƴ��_��ԓλ���@ʾ�����Σ��]���xͨ�Ĕ�(sh��)�a�ܾͲ�������ͨ�^�֕r݆�����Ƹ�����(sh��)�a�ܵĵ�COM�ˣ���ʹ������(sh��)�a��݆���ܿ��@ʾ���@���DŽӑB(t��i)�(q��)�ӡ���݆���@ʾ�^���У�ÿλ��(sh��)�a�ܵ��c(di��n)��?x��)r�g��1��2ms�������˵�ҕ�X�����F(xi��n)�l(f��)����O�ܵ����xЧ��(y��ng)���M�܌�(sh��)�H�ϸ�λ��(sh��)�a�ܲ���ͬ�r�c(di��n)������ֻҪ������ٶ����죬�o�˵�ӡ�����һ�M��(w��n)�����@ʾ��(sh��)��(j��)���������W�q�У��ӑB(t��i)�@ʾ��Ч�����o�B(t��i)�@ʾ��һ�ӵģ��܉�(ji��)ʡ������I/O�˿ڣ����ҹ��ĸ��͡� �����O(sh��)Ӌ(j��)����6λ��ꎘO��(sh��)�a�ܣ��xȡAT89C51��P0��������̖ݔ���˿ڣ�����Ӄ�Ƭ�i����74HC573,�����(q��)�Ӕ�(sh��)�a�ܣ�����һƬ���锵(sh��)�a�ܵĶ��x��̖ݔ��ˣ���һƬ���锵(sh��)�a�ܵ�λ�x��̖ݔ��ˣ��xȡAT89C51��P2.6��P2.7�քe�����Ƭ�i������Ƭ�x��̖ݔ��ˣ��·�D������ʾ�� 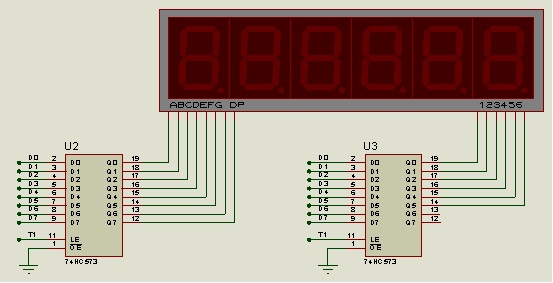
�D8 LED�@ʾ�·
2.6 D/A�D(zhu��n)�Q���Ŵ��·
2.6.1 DAC0832���ܽ�BDAC0832��8�ֱ��ʵ�D/A�D(zhu��n)�Q����оƬ���c̎������ȫ���ݡ��@��DAоƬ����r(ji��)��������ӿں��Ρ��D(zhu��n)�Q�������ȃ�(y��u)�c(di��n)���چ�Ƭ�C(j��)��(y��ng)��ϵ�y(t��ng)�еõ��V���đ�(y��ng)�á�D/A�D(zhu��n)�Q����8λݔ���i������8λDAC�Ĵ�����8λD/A�D(zhu��n)�Q�·���D(zhu��n)�Q�����·��(g��u)�ɡ������_�D������ʾ�� 
�D9 DAC0832���_�D
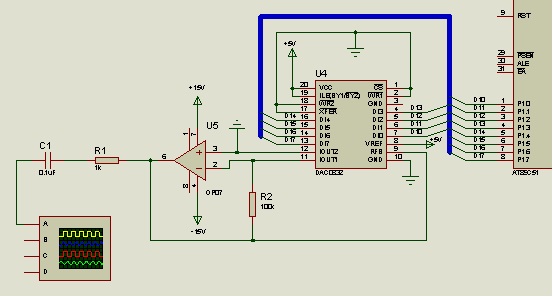
�P(gu��n)��DAC0832�����_�������£� D0��D7����(sh��)����̖ݔ��ˡ� ILE��ݔ��Ĵ������S�����ƽ��Ч�� CS��Ƭ�x��̖�����ƽ��Ч�� WR1������̖1�����ƽ��Ч�� XFER�����Ϳ�����̖�����ƽ��Ч�� WR2������̖2�����ƽ��Ч�� IOUT1��IOUT2��DAC���ݔ���ˡ� RFB���Ǽ�����Ƭ��(n��i)������\(y��n)�ŵķ�����衣 VREF������(zh��n)늉���-10��10V���� Vcc����Դ늉���+5��+15V���� AGND��ģ�M�ء� NGND����(sh��)�ֵأ����cAGND����һ��ʹ�á� 2.6.2 D/A�D(zhu��n)�Q�·���چ�Ƭ�C(j��)ݔ�����ǔ�(sh��)����̖�����Ҫ�õ�ģ�M��̖�IJ��ξͱ�회����M(j��n)�Д�(sh��)ģ�D(zhu��n)�Q���҂�������DAC0832��(sh��)ģ�D(zhu��n)�Q����������ݔ�������ݔ������Ҫ����\(y��n)��Ŵ���OP07ʹ֮�b�Q��늉�ݔ�������ͨ�^ʾ�����@ʾݔ���IJ��Ρ��҂��xȡ��AT89C51��P1�����鲨�Δ�(sh��)����̖��ݔ���˿ڣ��·�D������ʾ�� �D10 D/A�D(zhu��n)�Q�·
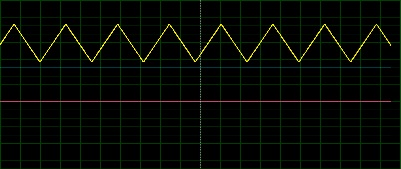
3 ϵ�y(t��ng)�{(di��o)ԇ�����O(sh��)Ӌ(j��)��ϵ�y(t��ng)������Proteusܛ�����M(j��n)�У������ÅR���Z���M(j��n)�г���ľ����� 3.1 ܛ���{(di��o)ԇ3.1.1 ���Dz��a(ch��n)���D11 ���Dz�����D TRI: CJNE R7,#0FFH,GO1 CLR 20H GO1: CJNE R7,#00H,GO2 SETB 20H GO2: JNB TF1,GO3 CLR TF1 JB 20H,GO4 DEC R7 SJMP GO6 GO4: INC R7 GO6: MOV P1,R7 LCALL DISPLAY GO3: MOV A,P3 ORL A,#1FH CPL A JZ GO5 LCALL DELAY MOV A,P3 ORL A,#1FH CPL A JZ GO5 LJMP CHANGESTATE GO5: LJMP TRI 3.1.2 �����a(ch��n)��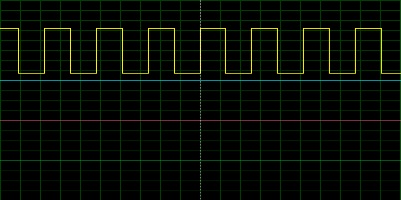
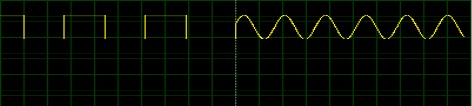
�D12 ��������D REC:JNB TF1,GG1 CLR TF1 DJNZ R2,GG2 MOV R2,#0FFH CPL 20H GG2:JB 20H,GG3 MOV P1,#00H SJMP GG4 GG3:MOV P1,#0FFH GG4: GG1:MOV A,P3 ORL A,#0FH CPL A JZ GG5 LCALL DELAY MOV A,P3 ORL A,#0FH CPL A JZ GG5 GG5:LJMP REC 3.1.3 ���Ҳ��a(ch��n)��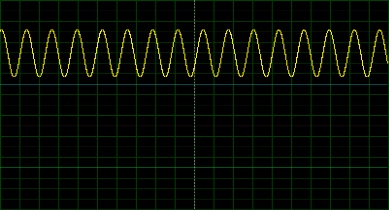
�D13 ���Ҳ�����D SIN: JNB TF1,G1 CLR TF1 INC R1 MOV A,R1 MOVC A,@A+DPTR MOV P1,A G1: MOV A,P3 ORL A,#1FH CPL A JZ G2 MOV A,P3 ORL A,#1FH CPL A JZ G2 G2: LJMP SIN
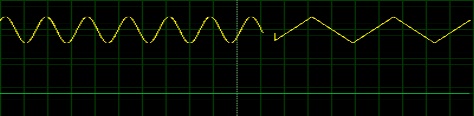
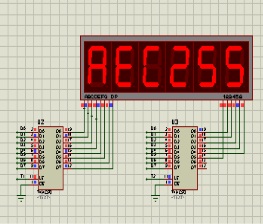
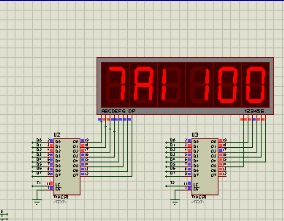
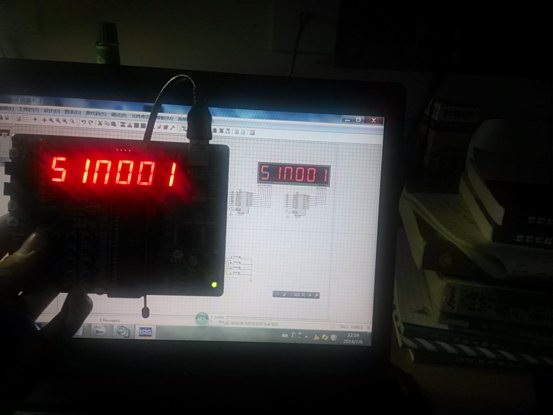
3.1.4 �I�P���� ͨ�^���I�Ŀ��ƣ����Ԍ�(sh��)�F(xi��n)���ε���D(zhu��n)�Q���{(di��o)�l�Ĺ��ܡ�P3.5��P3.6�˿ڵ��I�P�քe��(sh��)�F(xi��n)�l�ʵļӜp���ܣ�P3.7�˿ڵ��I�P��(sh��)�F(xi��n)����֮�g����D(zhu��n)�Q�������Ч�����D��ʾ�� �D14 �����D(zhu��n)�Q����D 3.1.5 LED�@ʾ�����O(sh��)Ӌ(j��)����6λ��(sh��)�a�܌�(sh��)�F(xi��n)�@ʾ���ܣ�����ǰ3λ�����@ʾ���ε���ͣ�REC����������SIN�������Ҳ���TRI�������Dz�;��3λ�����@ʾ���ε��l�ʡ������Ч�����D��ʾ�� �D15 LED����D 3.2 Ӳ���{(di��o)ԇ�����O(sh��)Ӌ(j��)��Ӳ���·�{(di��o)ԇ�Y(ji��)�����D��ʾ��
�D16 Ӳ��Ч���D
4 ϵ�y(t��ng)���ܽ�B �����O(sh��)Ӌ(j��)���·�Ɍ�(sh��)�F(xi��n)���������ܣ� �����O(sh��)Ӌ(j��)�·�ɮa(ch��n)�����������Dz������Ҳ����N���Σ�����ͨ�^�I�P���ƿ��Ԍ�(sh��)�F(xi��n)���N����֮�g����D(zhu��n)�Q���l���{(di��o)��(ji��)�Ĺ��ܡ� �����O(sh��)Ӌ(j��)���@ʾ����ͨ�^6λ��(sh��)�a�܌�(sh��)�F(xi��n)�������@ʾ���N���ε���ͺ��l�ʡ� �����O(sh��)Ӌ(j��)���·�����I�P���ƹ��ܣ������M(j��n)�����N����֮�g�������D(zhu��n)�Q�Ͳ����l�ʵ��{(di��o)��(ji��)�������Ԍ���׃��ĽY(ji��)����(sh��)�r���@ʾ���ڔ�(sh��)�a���ϡ�
5 �O(sh��)Ӌ(j��)���Y(ji��)�҂�С�M�˴ε��O(sh��)Ӌ(j��)�}Ŀ�Dz��ΰl(f��)�������O(sh��)Ӌ(j��)��ͨ�^С�M�ɆT����һ���µ�Ŭ���������ձ�������O(sh��)Ӌ(j��)��ِ�����P(gu��n)Ҫ����K��ɴ˴��O(sh��)Ӌ(j��)���ڴ˴��O(sh��)Ӌ(j��)���ի@�H�࣬��Ҫ�������c(di��n)�� - ͨ�^���·���O(sh��)Ӌ(j��)����51ϵ�І�Ƭ�C(j��)��ԭ�����������M(j��n)һ�����˽⣬��֮ǰ�W(xu��)�^�ĕ����ϵ��·֪�R���˸���̵��w�������(f��)λ�·��ԭ���������·�����ã��������Ĺ��ܣ�LED�@ʾ�·��ԭ���ȣ���Ϥ��DAC0832оƬ��ԭ�����ܣ������܌����M(j��n)�Б�(y��ng)�á�
- ͨ�^ԭ��D���L�ƣ��W(xu��)����Proteusܛ����ʹ�ã��������������һЩ���ε��·�O(sh��)Ӌ(j��)�������õ�һЩԪ��������һ�����˽���J(r��n)�R��
- �����O(sh��)Ӌ(j��)��Ӳ���·�������Σ����IJ����dz���ľ��������]���R���Z���cӲ���·(li��n)ϵ���^�o�ܣ��҂��Mͨ�^ӑՓ��K�xȡ�R���Z���M(j��n)�г���ľ�������������{(di��o)ԇ�^�̲����e�`����ܛ����Ӳ�����{(di��o)ԇ�A�������ܶ�Ć��}����LED�@ʾ�y�a���W�q������ʧ��ȣ�ͨ�^����IJ����e�`���������M(j��n)������(y��ng)���ģ�ʹ���_(d��)���O(sh��)Ӌ(j��)��Ҫ�����@���^���У��J(r��n)�R���Еr��һ�����ε��e�`���п�������·�o���������������^��ʧ֮���壬��֮ǧ������B(y��ng)���҂���(y��n)֔(j��n)��(x��)�µĹ����B(t��i)�ȣ�ͬ�r���·�ĵĹ���ԭ�����˸���̵��J(r��n)�R��
- �ڱ����·�O(sh��)Ӌ(j��)���^���У�����w��������һ�������^���(f��)�s��ϵ�y(t��ng)�O(sh��)Ӌ(j��)��һ��Ҫ�W(xu��)�����ֹ���ģ�K��������(sh��)�F(xi��n)����K���M(j��n)�����ϣ��в���üë����һ��ץ���ǘӲ��H���������韩��Ч�ʵͣ��������׳��e��
- �����ϵÁ��K�X�\���^֪����Ҫ���С���ͨ�^��������O(sh��)Ӌ(j��)��ِ������w������Փ(li��n)ϵ��(sh��)�`����Ҫ�ԣ�Ҫ�W(xu��)����W(xu��)���á�ͬ�r���ڌ�(sh��)�`���^���У�Ҳ���Լ����Փ֪�R���J(r��n)�R����߄���������
- ͨ�^��������O(sh��)Ӌ(j��)��ِ���Ҹ�����̵��J(r��n)�R���F(tu��n)�(du��)��������Ҫ�ԣ�С�M�ɆT�ֹ����������O(sh��)Ӌ(j��)�ɹ����P(gu��n)�I��ֻ�д�҈F(tu��n)�Y(ji��)һ�£����ܸ�����õ�����΄�(w��)��
�҂��˴ε��O(sh��)Ӌ(j��)�����M���O(sh��)Ӌ(j��)��Ҫ��(d��ng)Ȼ߀�Ǵ��ڲ���ĵط������箔(d��ng)�l���^С�ĕr���Ε���Щʧ�棬���ε��l���{(di��o)��(ji��)�������^С��D/A�D(zhu��n)�Q���D(zhu��n)�Q�r���Լ�һ���i�������Ŵ��·�O(sh��)Ӌ(j��)��߀�д��M(j��n)һ�����M(j��n)��ʹ����и���(qi��ng)��ݔ�������ȡ�
���1 ϵ�y(t��ng)ԭ��D
��Ƭ�C(j��)Դ��������:
- ORG 0000H
- lJMP MAIN
-
- MAIN:
- MOV TMOD,#20H
- MOV R0,#02H
- MOV A,#0FFH
- MOV P3,A
- MOV A,#70H
- MOV SP,A
- MOV R6,#0FFH
- REMAIN:CLR TR1
- MOV TH1,R6
- SETB TR1
- LCALL JM
-
- CJNE R0,#01,SHIFT
- TRI: CJNE R7,#0FFH,GO1
- CLR 20H
- GO1: CJNE R7,#00H,GO2
- SETB 20H
-
- GO2: JNB TF1,GO3
- CLR TF1
- JB 20H,GO4
- DEC R7
- SJMP GO6
- GO4: INC R7
- GO6: MOV P1,R7
- LCALL DISPLAY
- GO3:
- MOV A,P3
- ORL A,#1FH
- CPL A
- JZ GO5
- LCALL DELAY
- MOV A,P3
- ORL A,#1FH
- CPL A
- JZ GO5
- LJMP CHANGESTATE
- GO5: LJMP TRI
-
- SHIFT:JC SIN1
- REC:JNB TF1,GG1
- CLR TF1
- DJNZ R5,GG2
- MOV R5,#0FFH
- CPL 20H
- GG2:JB 20H,GG3
- MOV P1,#00H
- SJMP GG4
- GG3:MOV P1,#0FFH
- GG4:LCALL DISPLAY
- GG1:MOV A,P3
- ORL A,#1FH
- CPL A
- JZ GG5
- LCALL DELAY
- MOV A,P3
- ORL A,#1FH
- CPL A
- JZ GG5
- LCALL CHANGESTATE
- GG5:LJMP REC
-
- SIN1:NOP
- MOV DPTR,#TABSIN
- SIN: JNB TF1,G1
- CLR TF1
- INC R1
- MOV A,R1
- MOVC A,@A+DPTR
- MOV P1,A
- LCALL DISPLAY
- G1: MOV A,P3
- ORL A,#1FH
- CPL A
- JZ G2
- LCALL DELAY
- MOV A,P3
- ORL A,#1FH
- CPL A
- JZ G2
- LCALL CHANGESTATE
- G2: LJMP SIN
-
- CHANGESTATE:
- JB P3.7,GOTO1
- INC R0
- CJNE R0,#03H,GOTO1
- MOV R0,#00H
- GOTO1: JB P3.6,GOTO2
- INC R6
- GOTO2: JB P3.5,GOTO3
- DEC R6
- GOTO3: MOV A,P3
- CPL A
- JNZ GOTO3
- LJMP REMAIN
-
- JM:MOV DPTR,#TABNUM
- MOV A,R6
- MOV B,#100
- DIV AB
- MOVC A,@A+DPTR
- MOV 14H,A
- MOV A,B
- MOV B,#10
- DIV AB
- MOVC A,@A+DPTR
- MOV 15H,A
- MOV A,B
- MOVC A,@A+DPTR
- MOV 16H,A
-
- MOV DPTR,#TABWM
- MOV A,R0
- MOV B,#03H
- MUL AB
- MOV 10H,A
- MOVC A,@A+DPTR
- MOV 11H,A
- INC DPTR
- MOV A,10H
- MOVC A,@A+DPTR
- MOV 12H,A
- MOV A,10H
- INC DPTR
- MOVC A,@A+DPTR
- MOV 13H,A
- RET
-
-
- DISPLAY:
- SETB P2.6
- MOV P0,11H
- CLR P2.6
- MOV P0,#0FFH
- SETB P2.7
- MOV P0,#0FEH
- CLR P2.7
- MOV P0,#0FFH
- LCALL DELAY
-
- SETB P2.6
- MOV P0,12H
- CLR P2.6
- MOV P0,#0FFH
- SETB P2.7
- MOV P0,#0FDH
- CLR P2.7
- MOV P0,#0FFH
- LCALL DELAY
-
- SETB P2.6
- MOV P0,13H
- CLR P2.6
- MOV P0,#0FFH
- SETB P2.7
- MOV P0,#0FBH
- CLR P2.7
- MOV P0,#0FFH
- LCALL DELAY
-
- SETB P2.6
- MOV P0,14H
- CLR P2.6
- MOV P0,#0FFH
- SETB P2.7
- MOV P0,#0F7H
- CLR P2.7
- MOV P0,#0FFH
- LCALL DELAY
-
- SETB P2.6
- MOV P0,15H
- CLR P2.6
- MOV P0,#0FFH
- SETB P2.7
- MOV P0,#0EFH
- CLR P2.7
- MOV P0,#0FFH
- LCALL DELAY
-
- SETB P2.6
- MOV P0,16H
- CLR P2.6
- MOV P0,#0FFH
- SETB P2.7
- MOV P0,#0DFH
- CLR P2.7
- MOV P0,#0FFH
- LCALL DELAY
- RET
- DELAY:MOV R2,#0FFH
- MOV R3,#1
- LOOP:
- DJNZ R3,LOOP
- MOV R3,#2
- DJNZ R2,LOOP
- RET
-
- TABNUM: DB 3FH,06H,5BH,4FH,66H
- DB 6DH,7DH,07H,7FH,6FH
- TABWM: DB 6DH,06H,37H,07H,77H
- DB 30H,77H,79H,39H
- TABSIN:
- DB 80H,83H,86H,89H,8DH,90H,93H,96H
- DB 99H,9CH,9FH,0A2H,0A5H,0A8H,0ABH,0AEH
- DB 0B1H,0B4H,0B7H,0BAH,0BCH,0BFH,0C2H,0C5H
- DB 0C7H,0CAH,0CCH,0CFH,0D1H,0D4H,0D6H,0D8H
- DB 0DAH,0DDH,0DFH,0E1H,0E3H,0E5H,0E7H,0E9H
- DB 0EAH,0ECH,0EEH,0EFH,0F1H,0F2H,0F4H,0F5H
- DB 0F6H,0F7H,0F8H,0F9H,0FAH,0FBH,0FCH,0FDH
- DB 0FDH,0FEH,0FFH,0FFH,0FFH,0FFH,0FFH,0FFH
- DB 0FFH,0FFH,0FFH,0FFH,0FFH,0FFH,0FEH,0FDH
- DB 0FDH,0FCH,0FBH,0FAH,0F9H,0F8H,0F7H,0F6H
- DB 0F5H,0F4H,0F2H,0F1H,0EFH,0EEH,0ECH,0EAH
- DB 0E9H,0E7H,0E5H,0E3H,0E1H,0DEH,0DDH,0DAH
- DB 0D8H,0D6H,0D4H,0D1H,0CFH,0CCH,0CAH,0C7H
- DB 0C5H,0C2H,0BFH,0BCH,0BAH,0B7H,0B4H,0B1H
- DB 0AEH,0ABH,0A8H,0A5H,0A2H,9FH,9CH,99H
- DB 96H,93H,90H,8DH,89H,86H,83H,80H
- DB 80H,7CH,79H,78H,72H,6FH,6CH,69H
- DB 66H,63H,60H,5DH,5AH,57H,55H,51H
- DB 4EH,4CH,48H,45H,43H,40H,3DH,3AH
- DB 38H,35H,33H,30H,2EH,2BH,29H,27H
- DB 25H,22H,20H,1EH,1CH,1AH,18H,16H
- DB 15H,13H,11H,10H,0EH,0DH,0BH,0AH
- DB 09H,08H,07H,06H,05H,04H,03H,02H
- DB 02H,01H,00H,00H,00H,00H,00H,00H
- DB 00H,00H,00H,00H,00H,00H,01H,02H
- DB 02H,03H,04H,05H,06H,07H,08H,09H
- DB 0AH,0BH,0DH,0EH,10H,11H,13H,15H
- DB 16H,18H,1AH,1CH,1EH,20H,22H,25H
- DB 27H,29H,2BH,2EH,30H,33H,35H,38H
- DB 3AH,3DH,40H,43H,45H,48H,4CH,4EH
- DB 51H,55H,57H,5AH,5DH,60H,63H,66H
- DB 69H,6CH,6FH,72H,76H,79H,7CH,80H
-
-
- END
������Word��ʽ�ęn51�����d��ַ��
 51��Ƭ�C(j��)��(sh��)�F(xi��n)���ΰl(f��)����.doc
(3.34 MB, ���d��(sh��): 197)
51��Ƭ�C(j��)��(sh��)�F(xi��n)���ΰl(f��)����.doc
(3.34 MB, ���d��(sh��): 197)
2019-5-20 18:30 �ς�
�c(di��n)���ļ������d����
|

 [��(f��)��朽�]
[��(f��)��朽�]

 ����TQQ:125739409;���g(sh��)����QQȺ281945664
����TQQ:125739409;���g(sh��)����QQȺ281945664