分享給大家

1.jpg (1.43 MB, 下載次數: 89)
下載附件
2019-8-12 20:23 上傳
智慧農業就是將物聯網技術運用到傳統農業中去,運用傳感器和軟件通過移動平臺或者電腦平臺對農業生產進行控制,使傳統農業更具有“智慧”。除了精準感知、控制與決策管理外,從廣泛意義上講,智慧農業還包括農業電子商務、食品溯源防偽、農業休閑旅游、農業信息服務等方面的內容。 智慧農業是農業生產的高級階段,是集新興的互聯網、移動互聯網、云計算和物聯網技術為一體,依托部署在農業生產現場的各種傳感節點(環境溫濕度、土壤水分、二氧化碳、圖像等)和無線通信網絡實現農業生產環境的智能感知、智能預警、智能決策、智能分析、專家在線指導,為農業生產提供精準化種植、可視化管理、智能化決策。 本次實驗以大棚監測控制系統為目標,使用TPYBoardv102開發板、各種傳感器、電機等,實現一個智能大棚監測控制系統的基礎模型。 系統主要的技術特點: - 監控功能系統:根據各類傳感器來獲取植物生長的環境信息,如監測土壤水分、空氣溫度、空氣濕度、光照強度等參數(大家可根據自己的需求,增加其他參數,如二氧化塘、土壤溫度等)。
- 自動控制系統:TPYBoardv102開發板作為主控模塊,負責各個環境信息的收集與匯總,并根據以上各類信息的反饋對農業大棚內進行自動灌溉、自動降溫、自動卷遮光罩等自動控制。
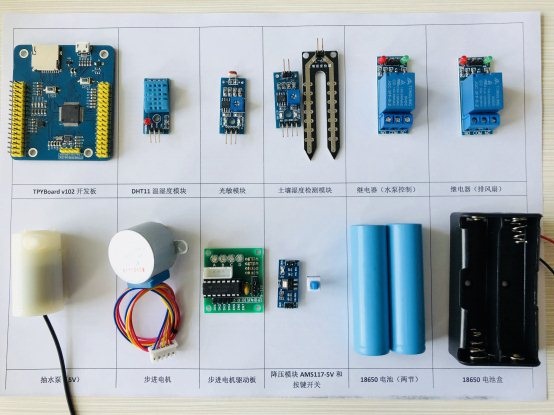
所需器件
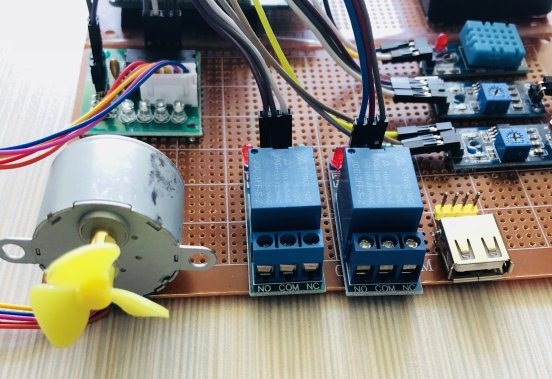
實物圖:(部分主要器件)
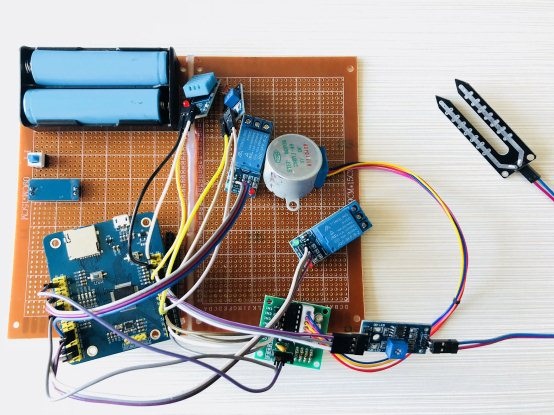
程序設計(1)獲取溫濕度數據,當溫度高于閾值時,觸發繼電器,打開排風扇,反之關閉; (2)獲取土壤濕度數據,當濕度低于土壤濕度檢測模塊的閾值時,土壤濕度檢測模塊的OUT引腳會輸出高電平,這時觸發繼電器,啟動水泵進行灌溉; (3)獲取光照強度數據,當光照強度高于閾值時,觸發步進電機,卷起遮光罩,反之蓋上。 實物連接 先連接電源部分。電源部分主要涉及到降壓模塊和按鍵開關。先用萬用表,找出按鍵開關中哪兩個引腳是按下導通,彈起不導通的。這里,我們假設為引腳A和引腳B。
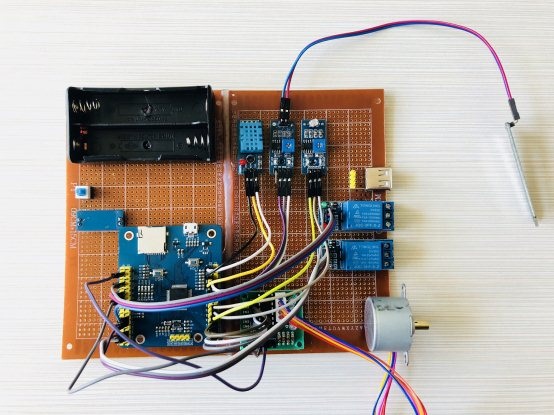
各類器件沒有固定,看起來有點亂。接下來,用熱熔膠把器件整齊的固定在洞洞板上。
本次我用步進電機來模塊遮光罩的卷起和放開。為了能明顯的看到步進電機的轉動效果,我在步進電機上粘了一個塑料小風扇。 還有一處地方,就是降壓模塊的OUT輸出電源要接到開發板上,用于給其供電。整體效果如下圖: 程序調試 接線完畢后,就要將最重要的程序放到開發板上。首先,通過USB數據線將開發板接入電腦,電腦上會出現一個類似U盤的可移動設備,名稱為【TPYBFLASH】,把程序拷貝到里面即可。 注意:操作開發板磁盤時,板載的紅色LED會亮,說明開發板正在保存操作,需等待紅燈熄滅再進行其他操作。
演示效果 程序調試完,拔掉USB數據線。放入18650電池,按下按鍵開關即可。不同的環境下,土壤濕度和光照模塊需要調節靈敏度(轉換模塊上的藍色按鈕)。 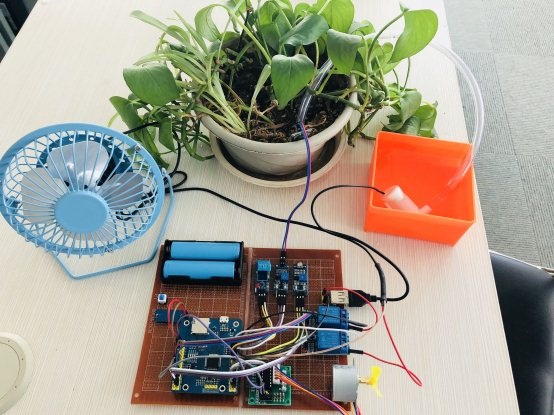
源程序如下:
- Dht11.py:
- import pyb
- from pyb import UART
- from pyb import Pin,delay,udelay
- import time
- class DHT11:
- def __init__(self,pin_name):
- time.sleep(1)
- self.N1 = Pin(pin_name, Pin.OUT_PP)
- self.PinName=pin_name
- pyb.delay(10)
- def read_data(self):
- self.__init__(self.PinName)
- data=[]
- j=0
- N1=self.N1
- N1.low()
- delay(20)
- N1.high()
- N1 = Pin(self.PinName, Pin.IN)
- udelay(30)
- if N1.value() != 0:
- return [0,0]
- while N1.value()==0:
- continue
- while N1.value()==1:
- continue
- while j<40:
- k=0
- while N1.value()==0:
- continue
- while N1.value()==1:
- k+=1
- if k>100:break
- if k<3:
- data.append(0)
- else:
- data.append(1)
- j=j+1
- print('Sensor is working')
- j=0
- humidity_bit=data[0:8]
- humidity_point_bit=data[8:16]
- temperature_bit=data[16:24]
- temperature_point_bit=data[24:32]
- check_bit=data[32:40]
- humidity=0
- humidity_point=0
- temperature=0
- temperature_point=0
- check=0
- for i in range(8):
- humidity+=humidity_bit[i]*2**(7-i)
- humidity_point+=humidity_point_bit[i]*2**(7-i)
- temperature+=temperature_bit[i]*2**(7-i)
- temperature_point+=temperature_point_bit[i]*2**(7-i)
- check+=check_bit[i]*2**(7-i)
- tmp=humidity+humidity_point+temperature+temperature_point
- if check==tmp:
- print('temperature is',temperature,'-wet is',humidity,'%')
- else:
- print('Error:',humidity,humidity_point,temperature,temperature_point,check)
- return [str(temperature),str(humidity)]
- # main.py
- import pyb
- from pyb import Pin
- Pin_All=[Pin(p,Pin.OUT_PP) for p in ['X1','X2','X3','X4']]
- STEPER_ROUND=512 #轉動一圈(360度)的周期
- ANGLE_PER_ROUND=STEPER_ROUND/360 #轉動1度的周期
- class SteperMotor():
- def __init__(self,pin = None,speed=2):
- if pin != None:
- self.Pins = pin
- else:
- self.Pins = Pin_All
- self.Speed = speed
- #私有方法
- def __SteperWriteData(self,data):
- count=0
- for i in data:
- self.Pins[count].value(i)
- count+=1
- def __SteperFrontTurn(self):
- speed = self.Speed
-
- self.__SteperWriteData([1,1,0,0])
- pyb.delay(speed)
- self.__SteperWriteData([0,1,1,0])
- pyb.delay(speed)
- self.__SteperWriteData([0,0,1,1])
- pyb.delay(speed)
- self.__SteperWriteData([1,0,0,1])
- pyb.delay(speed)
-
- def __SteperBackTurn(self):
- speed = self.Speed
-
- self.__SteperWriteData([1,1,0,0])
- pyb.delay(speed)
-
- self.__SteperWriteData([1,0,0,1])
- pyb.delay(speed)
- self.__SteperWriteData([0,0,1,1])
- pyb.delay(speed)
- self.__SteperWriteData([0,1,1,0])
- pyb.delay(speed)
- def __SteperStop(self):
- self.__SteperWriteData([0,0,0,0])
-
- def steperRun(self,angle):
- val=ANGLE_PER_ROUND*abs(angle)
- if(angle>0):
- for i in range(0,val):
- self.__SteperFrontTurn()
- else:
- for i in range(0,val):
- self.__SteperBackTurn()
- angle = 0
- self.__SteperStop()
- 溫濕度main:
- from pyb import Pin
- from pyb import ADC
- from stepermotor import SteperMotor
- from dht11 import DHT11
- #0:亮 1:暗
- light = Pin('X22',Pin.IN)
- #0:濕 1:干
- hum = Pin('Y11',Pin.IN)
- dht = DHT11('Y12')
- #繼電器低電平觸發
- water = Pin('X12',Pin.OUT_PP)
- fan = Pin('X11',Pin.OUT_PP)
- water.value(1)
- fan.value(1)
- #步進電機
- Pin_All=[Pin(p,Pin.OUT_PP) for p in ['X21','X20','X19','X18']]
- #轉速(ms) 數值越大轉速越慢 最小值2ms
- sm = SteperMotor(pin = Pin_All,speed=2)
- hood = False #記錄遮光罩的狀態,默認是關閉
- def readTaHData():
- DATA = dht.read_data()#讀取溫濕度的值
- print(DATA[0],'℃')
- print(DATA[1],'%')
- #溫度大于25度,打開風扇,進行通風
- if int(DATA[0]) > 21:
- fan.value(0)
- else:
- fan.value(1)
- if __name__ == '__main__':
- while True:
- readTaHData()
- h_d = hum.value()
- print('hum:',h_d)
- if h_d:
- #土壤較干,打開抽水泵進行澆水
- water.value(0)
- else:
- #土壤較濕,關閉抽水泵停止澆水
- water.value(1)
- l_d = light.value()
- print('light:',l_d)
- if l_d:
- #光線較暗,啟動步進電機,關閉大棚的遮光罩
- if hood:
- sm.steperRun(-360)
- sm.steperRun(-360)
- hood = False
- else:
- #光線較亮,啟動步進電機,打開大棚的遮光罩
- if not hood:
- sm.steperRun(360)
- sm.steperRun(360)
- hood = True
 大棚.zip
(8.66 MB, 下載次數: 74)
大棚.zip
(8.66 MB, 下載次數: 74)
2019-8-12 20:41 上傳
點擊文件名下載附件
下載積分: 黑幣 -5
|










 QQ好友和群
QQ好友和群 QQ空間
QQ空間 騰訊微博
騰訊微博 騰訊朋友
騰訊朋友 收藏
收藏 淘帖
淘帖 頂
頂 踩
踩

