|
1.1 基本設(shè)計要求 (1)在綜合單片機實驗箱的硬件結(jié)構(gòu)上編寫軟件完成設(shè)計。 (2)程序的首地址應(yīng)使目標(biāo)機可以直接運行,即從0000H開端。在主程序的開端部分必須設(shè)置一個合適的棧底。程序放置的地址須持續(xù)且靠前,不要在中間留下大批的空間地址,以使目標(biāo)機可以應(yīng)用較少的硬件資源。 (3)利用無線發(fā)射和無線接收模塊控制單片機,讓單片機翻譯傳輸指令,從而實現(xiàn)相應(yīng)的功能。具體的過程如下:無線發(fā)射模塊發(fā)出指令,無線接收模塊接收信號后,傳輸給單片機,單片機接收到信號后翻譯并傳輸給電機驅(qū)動模塊驅(qū)動電機旋轉(zhuǎn),從而實現(xiàn)小車的前進(jìn)、左轉(zhuǎn)、右轉(zhuǎn)、后退、停止、加速。 (4)使用TB6612驅(qū)動直流電機。 (5)軟件設(shè)計采用定時中斷,串口中斷結(jié)構(gòu),不得應(yīng)用軟件延時法。 (6)使用藍(lán)牙手機APP遠(yuǎn)程控制。 1.2 選做項目1、藍(lán)牙小車測速手機返回速度數(shù)據(jù)。 2、在以上設(shè)計的基礎(chǔ)上,增加超聲波測距模塊。 2 設(shè)計闡明
2.1設(shè)計內(nèi)容用STC80c52芯片單片機實驗箱及串口電路設(shè)計實現(xiàn)顯示時間并能夠調(diào)校時間的時鐘,還能夠?qū)崿F(xiàn)啟動/暫停,復(fù)位功能。 用STC80c52芯片、藍(lán)牙模塊及串口電路、定時器、TB6612驅(qū)動芯片、藍(lán)牙手機APP,TT電機、5v直流電源轉(zhuǎn)接板、設(shè)計實現(xiàn)更改PWM值、并能夠調(diào)校時間的時鐘,還能夠?qū)崿F(xiàn)小車的前進(jìn)、左轉(zhuǎn)、右轉(zhuǎn)、后退、停止、加速功能。 2.2設(shè)計要求(1) 在ZY15MCU12BD型綜合單片機實驗箱的硬件結(jié)構(gòu)上編寫軟件完成設(shè)計。 (2) 程序的首地址應(yīng)使目標(biāo)機可以直接運行,即從0000H開端。在主程序的開端部分必須設(shè)置一個合適的棧底。程序放置的地址須持續(xù)且靠前,不要在中間留下大批的空間地址,以使目標(biāo)機可以應(yīng)用較少的硬件資源。 (3)利用無線發(fā)射和無線接收模塊控制單片機,讓單片機翻譯傳輸指令,從而實現(xiàn)相應(yīng)的功能。具體的過程如下:無線發(fā)射模塊發(fā)出指令,無線接收模塊接收信號后,傳輸給單片機。使用串口中斷,接收到數(shù)據(jù)之后,進(jìn)入串口中斷。 (4單片機接受到指令之后,使用小車的TB6612驅(qū)動芯片,驅(qū)動電機前進(jìn)、左轉(zhuǎn)、右轉(zhuǎn)、后退、停止、加速。 (5) 軟件設(shè)計必須應(yīng)用8051片內(nèi)定時器,采用定時中斷結(jié)構(gòu),不得應(yīng)用軟件延時法。 (6) 上機調(diào)試程序。 (7) 寫出設(shè)計報告。 2.3設(shè)備及工作環(huán)境 (1) 硬件:盤算機一臺、51核心板、5v直流電源轉(zhuǎn)接板、充電頭。 (2) 軟件:Windows操縱系統(tǒng)、Keil C51軟件。 3 系統(tǒng)方案整體設(shè)計3.1 設(shè)計思路用STC80c52芯片、藍(lán)牙模塊及串口電路、定時器、TB6612驅(qū)動芯片,TT電機、5v直流電源轉(zhuǎn)接板、藍(lán)牙手機APP、設(shè)計實現(xiàn)更改PWM值、并能夠調(diào)校時間的時鐘,還能夠?qū)崿F(xiàn)小車的前進(jìn)、左轉(zhuǎn)、右轉(zhuǎn)、后退、停止、加速功能。 3.2 系統(tǒng)整體框圖代碼設(shè)計思路:當(dāng)藍(lán)牙手機APP連接上藍(lán)牙,通過手機APP向單片機發(fā)送相應(yīng)指令,當(dāng)單片機接收到指令。進(jìn)入相應(yīng)的串口中斷,執(zhí)行相應(yīng)的程序。設(shè)計實現(xiàn)更改PWM值,還能夠?qū)崿F(xiàn)小車的前進(jìn)、左轉(zhuǎn)、右轉(zhuǎn)、后退、停止、加速功能。 如下圖所示。 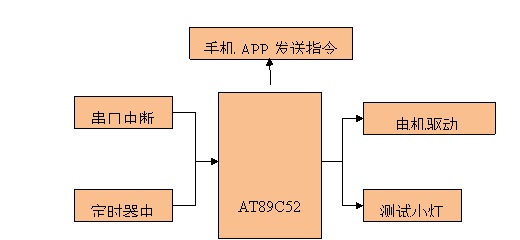
圖1 系統(tǒng)整體框圖 4 硬件設(shè)計
4.1 系統(tǒng)硬件設(shè)計
4.1.1 最小單片機系統(tǒng)(一)1、原理圖繪制 由于自己畫板子,沒有加引腳標(biāo)識,有相同的引腳名稱,導(dǎo)致有AD原理圖一直報錯,有重復(fù)的引腳命名。由于自己不熟悉ad元件封裝,導(dǎo)致找不到合適的元件,需要自己畫原理圖元件庫,和pcb封裝庫。 
使用編譯覆蓋功能,對原理圖中不需要在PCB圖中顯示的模塊,即使用現(xiàn)有PCB的模塊進(jìn)行遮蓋。 2、在對原理圖工程進(jìn)行編譯后,進(jìn)行生成PCB文件,并更改其布局。 
3、對封裝不符合的元件,繪制PCB封裝。 查找晶振封裝,畫元件pcb庫。 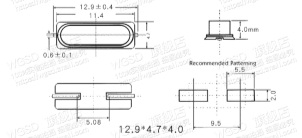
4、修改元件布局,盡量減少線路交錯,如果有交錯,需要增加過孔。 5、禁止布線區(qū)的繪制操作 將板層標(biāo)簽切換到keep-out layer,執(zhí)行菜單place》走線》繪制一閉合區(qū)域, 6、進(jìn)行自動布線操作,并利用手動布線,進(jìn)行修改布局,利用規(guī)則檢查,修改pcb圖中有錯誤的地方。 7、檢查—運行DRC規(guī)則檢查 糾錯 元件絲印跑到頂層,修改其到頂層,選中元件,在頁面右下方,選中pcb》右鍵》pcb inspector》更改元件所在層 8、補淚滴的操作 執(zhí)行工具》淚滴;通過設(shè)置選項設(shè)置淚滴種類圓弧形、直線型 、為焊盤或者過孔補淚滴》選擇淚滴類型 9、覆銅操作 菜單欄》工具》放置覆銅菜單命令 
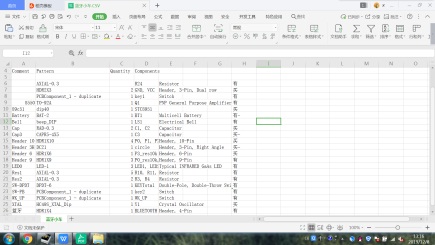
元件清單
4.1.2TB6612
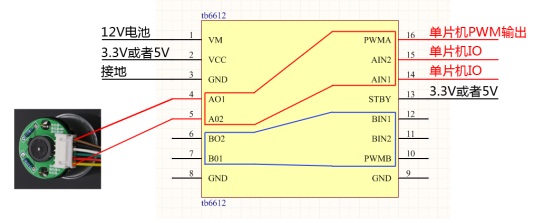
TB6612FNG 是東芝半導(dǎo)體公司生產(chǎn)的一款直流電機驅(qū)動器件,它具有大電流MOSFET-H 橋結(jié)構(gòu),雙通道電路輸出,可同時驅(qū)動 2 個電機。同PWA,AIN2,AIN1控制電機。其中PWMA接到單片機的PWM引腳,一般10KHZ即可,并通過改變占空比調(diào)節(jié)電機的速度。
4.1.3HC-06模塊藍(lán)牙本次設(shè)計選擇的藍(lán)牙模塊是HC-06模塊,HC-06 是一款高性能的從機藍(lán)牙串口模塊,模塊兼容 5V 或 3.3V 單片機系統(tǒng),使用非常靈活、方便。 4.2 系統(tǒng)工作原理論述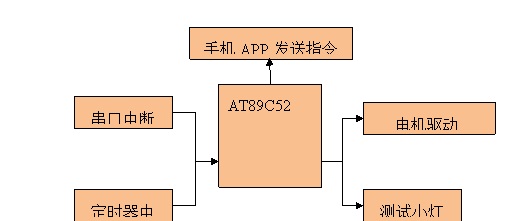 當(dāng)藍(lán)牙手機APP連接上藍(lán)牙,通過手機APP向單片機發(fā)送相應(yīng)指令,當(dāng)單片機接收到指令。進(jìn)入相應(yīng)的串口中斷,執(zhí)行相應(yīng)的程序。設(shè)計實現(xiàn)更改PWM值、并能夠調(diào)校時間的時鐘,還能夠?qū)崿F(xiàn)小車的前進(jìn)、左轉(zhuǎn)、右轉(zhuǎn)、后退、停止、加速功能。軟件設(shè)計采用定時中斷,串口中斷結(jié)構(gòu),未用軟件延時法。 當(dāng)藍(lán)牙手機APP連接上藍(lán)牙,通過手機APP向單片機發(fā)送相應(yīng)指令,當(dāng)單片機接收到指令。進(jìn)入相應(yīng)的串口中斷,執(zhí)行相應(yīng)的程序。設(shè)計實現(xiàn)更改PWM值、并能夠調(diào)校時間的時鐘,還能夠?qū)崿F(xiàn)小車的前進(jìn)、左轉(zhuǎn)、右轉(zhuǎn)、后退、停止、加速功能。軟件設(shè)計采用定時中斷,串口中斷結(jié)構(gòu),未用軟件延時法。
5 軟件設(shè)計5.1 分析論證軟件設(shè)計采用定時中斷,串口中斷結(jié)構(gòu),未用軟件延時法。大大提高芯片運行速率。使用tb6612驅(qū)動芯片控制電機,前進(jìn)、左轉(zhuǎn)、右轉(zhuǎn)、后退、停止、加速功能。使用藍(lán)牙可遠(yuǎn)程控制電機。 5.1.1 hc06藍(lán)牙模塊模塊使用串口通訊,通過藍(lán)牙模塊連接手機APP,使用手機APP向單片機發(fā)送16進(jìn)制數(shù)據(jù)。 5.1.2 TB6612驅(qū)動模塊通過控制該芯片的PWA,AIN2,AIN1、STBY引腳,PWB,BIN2,BIN1,控制兩路電機的正反轉(zhuǎn),前進(jìn)、左轉(zhuǎn)、右轉(zhuǎn)、后退、停止、加速。 5.1.3 pwm占空比更改模塊該模塊重要功效是修改占空比,更改電機轉(zhuǎn)速。 3.1.4直流電壓轉(zhuǎn)接模塊該模塊的功能是引出電源排針,給電機及各個模塊供電。 5.1.5 整體功能當(dāng)藍(lán)牙手機APP連接上藍(lán)牙,通過手機APP向單片機發(fā)送相應(yīng)指令,當(dāng)單片機接收到指令。進(jìn)入相應(yīng)的串口中斷,執(zhí)行相應(yīng)的程序。設(shè)計實現(xiàn)更改PWM值、并能夠調(diào)校時間的時鐘,還能夠?qū)崿F(xiàn)小車的前進(jìn)、左轉(zhuǎn)、右轉(zhuǎn)、后退、停止、加速功能。軟件設(shè)計采用定時中斷,串口中斷結(jié)構(gòu),未用軟件延時法。 5.2 程序流程圖軟件設(shè)計采用定時中斷,串口中斷結(jié)構(gòu),未用軟件延時法。藍(lán)牙手機APP連接上藍(lán)牙,通過手機APP向單片機發(fā)送相應(yīng)指令,當(dāng)單片機接收到指令,進(jìn)入相應(yīng)的串口中斷,執(zhí)行相應(yīng)的程序。接收到“0x01”車的前進(jìn),接收到“0x02”車的左轉(zhuǎn),接收到“0x03”車的右轉(zhuǎn),接收到“0x04”車的后退,接收到“0x05”車的加速,接收到“0x06”車的停止。 5.3程序清單1、主程序
6 調(diào)試過程及分析編寫好的源程序在 Keil 編譯后未呈現(xiàn)正常的現(xiàn)象,這些錯誤導(dǎo)致浪費了很多時間。例如:像藍(lán)牙模塊使用9600波特率,為了模擬藍(lán)牙模塊通過串口給單片機接收數(shù)據(jù),使用XCOM模擬軟件,利用usb轉(zhuǎn)ttl模塊給單片機發(fā)送數(shù)據(jù)。在硬件焊接問題上,LED引腳焊反,部分引腳虛焊,導(dǎo)致接觸不良,stc89c52芯片損壞,導(dǎo)致無法正常下載入程序。在前期的程序編寫和幾天的上機調(diào)試,使我又獲得了很多新的知識,由于前期編寫程序時查了很多材料學(xué)到了很多知識,這幾天的調(diào)試更時獲得很新的知識,由于程序中又很多的錯誤,為了修正錯誤必須看書或向別人請教,在這個過程中無意識的獲得了很多知識。同時也使我對單片機更感興趣了,這點我感到很重要,相信這會對以后的學(xué)習(xí)有所幫助。 
51最小系統(tǒng)板PCB焊接圖 
藍(lán)牙小車實物圖 7 設(shè)計總結(jié)本次設(shè)計是用stc89c52單片機及串口電路設(shè)計一個基于手機APP的藍(lán)牙小車,經(jīng)過一個星期的調(diào)試,成果滿足基本設(shè)計請求,驗證無誤。設(shè)計重要用到了多種硬件,程序也比較長,比較麻煩,同時也碰到了不少艱苦,尤其是關(guān)于藍(lán)牙模塊與單片機通訊,使電機正常工作的設(shè)計實現(xiàn)。由于電機及驅(qū)動需要供電充足對電流也有一定要求,導(dǎo)致電機一直未正常轉(zhuǎn)動。通過本次設(shè)計,我懂得了小車的設(shè)計流程,尤其是硬、軟件的設(shè)計方法,以及電源及硬件焊接的重要性,以及電機驅(qū)動芯片及串口中斷和定時器中斷的一般原理,也進(jìn)一步了解了8051定時器的應(yīng)用和中斷CPU程序的編程方法,開辟了思路,提高了分工協(xié)作才能和分析題目,解決題目的能力。 完整的Word格式文檔51黑下載地址:
 文檔.doc
(9.95 MB, 下載次數(shù): 51)
文檔.doc
(9.95 MB, 下載次數(shù): 51)
2020-1-14 15:55 上傳
點擊文件名下載附件
下載積分: 黑幣 -5
| 









 QQ好友和群
QQ好友和群 QQ空間
QQ空間 騰訊微博
騰訊微博 騰訊朋友
騰訊朋友 收藏
收藏 淘帖
淘帖 頂
頂 踩
踩
